Micrometer Backstepping Control System for Linear Motion Single Axis Robot Machine Drive


Abstract
:1. Introduction
2. Materials and Methods
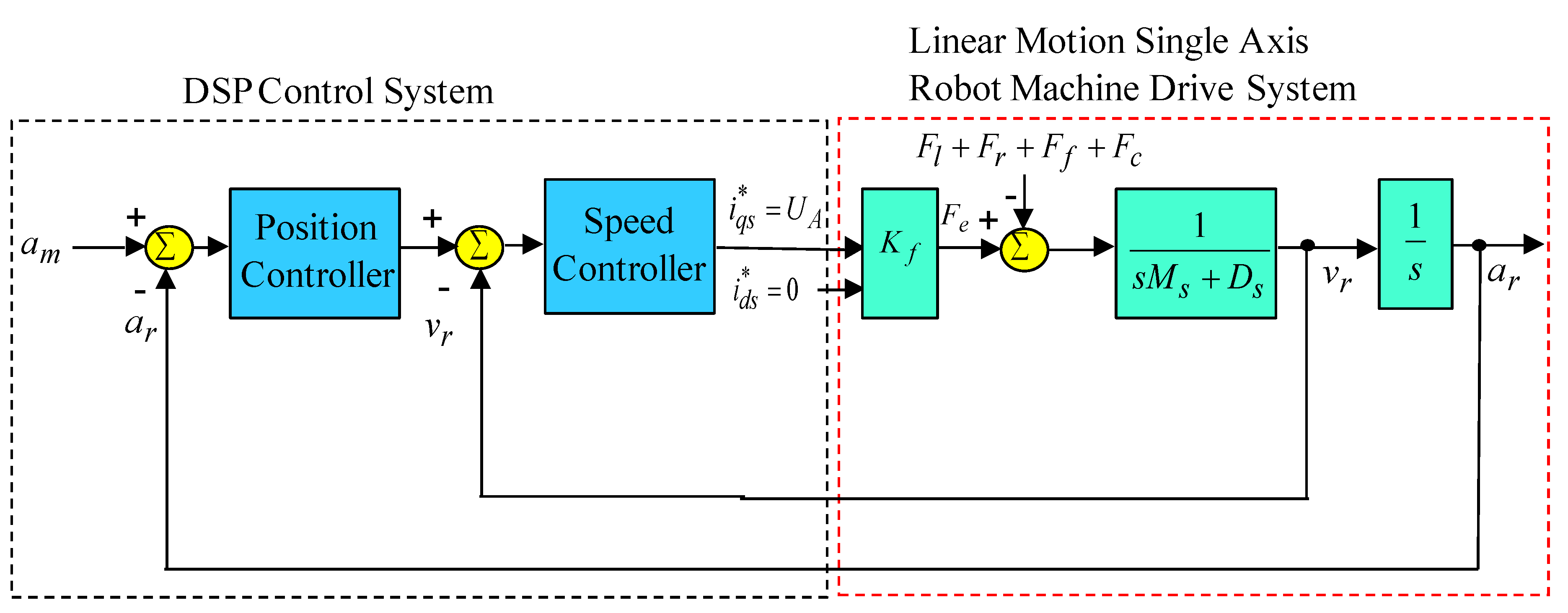
2.1. Model of Linear Motion Single Axis Robot Machine
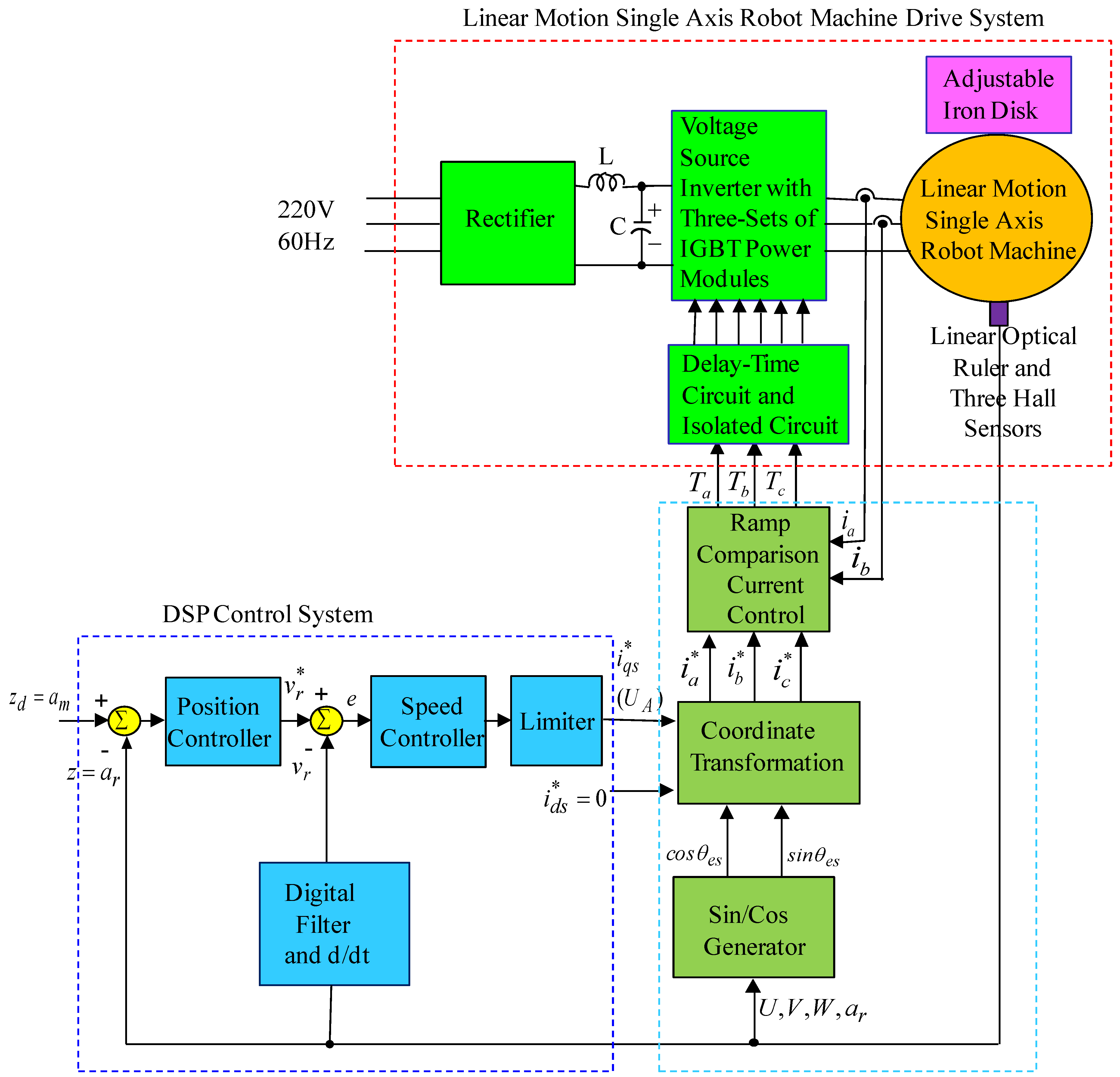
2.2. Drive System of Linear Motion Single Axis Robot Machine
2.3. Micrometer Backstepping Control System Using an Amended Recurrent Gottlieb Polynomials Neural Network and AACO with the Compensated Controller
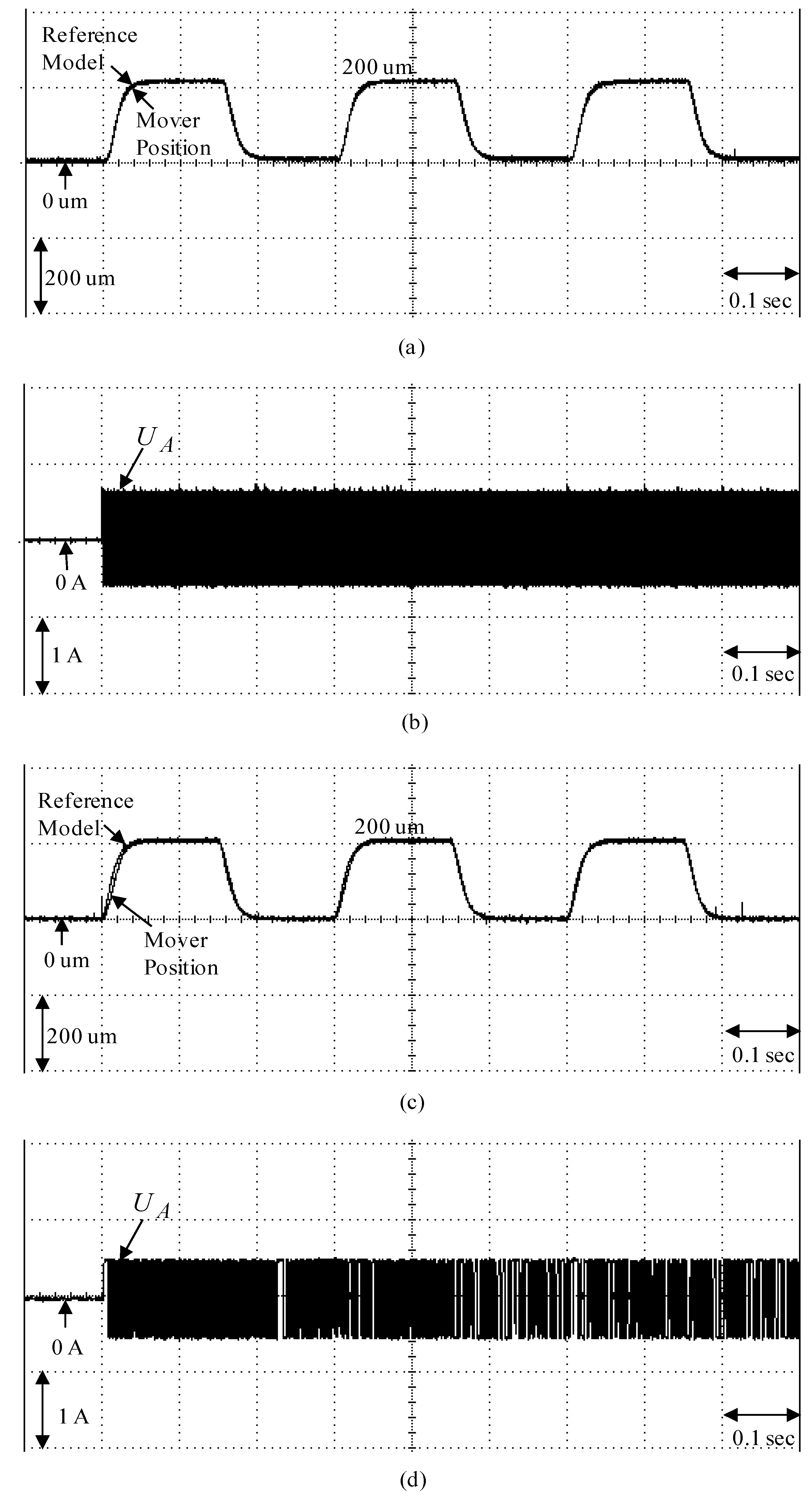
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Boldea, I.; Nasar, S.A. Linear Electric Actuators and Generators; Cambridge University Press: London, UK, 1999; pp. 68–87. [Google Scholar]
- Sanada, M.; Morimoto, S.; Takeda, Y. Interior permanent magnet linear synchronous motor for high-performance drives. IEEE Trans. Ind. Appl. 1997, 33, 966–972. [Google Scholar] [CrossRef]
- Lin, C.H. Precision motion control of a linear permanent magnet synchronous machine based on linear optical-ruler sensor and Hall sensor. Sensors. 2018, 18. [Google Scholar] [CrossRef] [PubMed]
- Kanellakopoulos, I.; Kokotovic, P.V.; Morse, A.S. Systematic design of adaptive controller for feedback linearizable system. IEEE Trans. Autom. Control. 1991, 36, 1241–1253. [Google Scholar] [CrossRef]
- Krstic, M.; Kokotovic, P.V. Adaptive nonlinear design with controller-identifier separation and swapping. IEEE Trans. Autom. Control. 1995, 40, 426–440. [Google Scholar] [CrossRef] [Green Version]
- Bartolini, G.; Ferrara, A.; Giacomini, L.; Usai, E. Peoperties of a combined adaptive/second-order sliding mode control algorithm for some classes of uncertain nonlinear systems. IEEE Trans. Autom. Control. 2000, 45, 1334–1341. [Google Scholar] [CrossRef]
- Lin, C.H. A backstepping control of LSM drive systems using adaptive modified recurrent Laguerre OPNNUO. J. Power Electron. 2016, 16, 598–609. [Google Scholar] [CrossRef]
- Xia, D.; Yao, Y.; Cheng, L. Indoor autonomous control of a two-wheeled inverted pendulum vehicle using ultra wide band technology. Sensors 2017, 17, 1401. [Google Scholar] [CrossRef] [PubMed]
- Ai, Q.; Zhu, C.; Zuo, J.; Meng, W.; Liu, Q.; Xie, S.Q.; Yang, M. Disturbance-estimated adaptive backstepping sliding mode control of a pneumatic muscles-driven ankle rehabilitation robot. Sensors 2018, 18, 66. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Wang, D.; Yin, J.; Wu, Y. A direct position-determination approach for multiple sources based on neural network computation. Sensors 2018, 18, 1925. [Google Scholar] [CrossRef] [PubMed]
- Almassri, A.M.M.; Wan, H.W.Z.; Ahmad, S.A.; Shafie, S.; Wada, C.; Horio, K. Self-calibration algorithm for a pressure sensor with a real-time approach based on an artificial neural network. Sensors 2018, 18, 2561. [Google Scholar] [CrossRef] [PubMed]
- Hu, J.; Wu, Z.; Qin, X.; Geng, H.; Gao, Z. An extended kalman filter and back propagation neural network algorithm positioning method based on anti-lock brake sensor and global navigation satellite system information. Sensors 2018, 18, 275. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.H. Adaptive nonlinear backstepping control using mended recurrent Romanovski polynomials neural network and mended particle swarm optimization for switched reluctance motor drive system. Trans. Inst. Meas. Control 2019. [Google Scholar] [CrossRef]
- Lin, C.H.; Chang, K.T. SCRIM drive system using adaptive backstepping control and mended recurrent Romanovski polynomials neural network with reformed particle swarm optimization. Int. J. Adapt. Control Signal Process. 2019, 33, 802–828. [Google Scholar] [CrossRef]
- Lin, C.H. A SCRIM drive system using backstepping control and revamped recurrent Romanovski PNN with mended ACO. IETE J. Res. 2019. [Google Scholar] [CrossRef]
- Lin, C.H.; Chang, K.T. Switched reluctance motor circuit drive system using adaptive nonlinear backstepping control with mended recurrent Romanovski polynomials neural network and mended particle swarm optimization. Int. J. Numer. Model. Electron. Netw. Devices Fields 2019, 32, e2629. [Google Scholar] [CrossRef]
- Ting, J.C.; Chen, D.F. Novel mingled reformed recurrent Hermite polynomial neural network control system applied in continuously variable transmission system. J. Mech. Sci. Technol. 2018, 32, 4399–4412. [Google Scholar] [CrossRef]
- Gottlieb, M.J. Concerning some polynomials orthogonal on a finite or enumerable set of points. Am. J. Math. 1938, 60, 453–458. [Google Scholar] [CrossRef]
- Khan, M.A.; Akhlaq, M. The present paper deals with certain generating functions of Gottlieb polynomials of several variables. Int. Trans. Appl. Sci. 2009, 1, 567–570. [Google Scholar]
- Choi, J. A generalization of Gottlieb polynomials in several variables. Appl. Math. Lett. 2012, 25, 43–46. [Google Scholar] [CrossRef] [Green Version]
- Dorigo, M.; Stützle, T. Ant Colony Optimization; Massachusetts: MIT Press: Cambridge, UK, 2004; pp. 91–101. [Google Scholar]
- Idris, H.; Ezugwu, A.E.; Junaidu, S.B.; Adewumi, A.O. An improved ant colony optimization algorithm with fault tolerance for job scheduling in grid computing systems. PLoS ONE 2017, 12, e0177567. [Google Scholar] [CrossRef]
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Prentice-Hall: Englewood Cliffs, NJ, USA, 1991; pp. 102–121. [Google Scholar]
- Astrom, J.; Wittenmark, B. Adaptive Control; Addison-Wesley: New York, NY, USA, 1995; pp. 65–81. [Google Scholar]
- Ku, C.C.; Lee, K.Y. Diagonal recurrent neural networks for dynamic system control. IEEE Trans. Neural Netw. 1995, 6, 144–156. [Google Scholar] [PubMed]
- Lin, C.H. Recurrent modified Elman neural network control of PM synchronous generator system using wind turbine emulator of PM synchronous servo motor drive. Int. J. Electr. Power Energy Syst. 2013, 52, 143–160. [Google Scholar] [CrossRef]
- Lewis, F.L.; Campos, J.; Selmic, R. Neuro-Fuzzy Control of Industrial Systems with Actuator Nonlinearities; SIAM Frontiers in Applied Mathematics: Auckland, New Zealand, 2002; pp. 78–94. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control system and five tested cases | micrometer backstepping control system using switching function with upper bound | |||||
| Performance | under the periodic step command in the rated case | under the periodic step command in the parametric variation case | under the periodic sinusoid command in the rated case | under the periodic sinusoid command in the parametric variation case | under the step force disturbance with adding load in the 200 µm case | |
| Maximum error of | 12 µm | 16 µm | 10 µm | 15 µm | 28 µm | |
| RMS error of | 8 µm | 11 µm | 7 µm | 10 µm | 17 µm | |
| Precision (Relative standard deviation of ) at 200 µm position | 198.1 µm (±1.01%) | 197.6 µm (±1.57%) | 198.6 µm (±1.00%) | 197.8 µm (±1.47%) | 196.5 µm (±2.09%) | |
| Accuracy (Relative error of ) at 200 µm position | 96.0% (±4.0%) | 94.5% (±5.5%) | 96.5% (±3.5%) | 95.0% (±5.0%) | 91.5% (±8.5%) | |
| Control system and five tested cases | micrometer backstepping control system by using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller | |||||
| performance | under periodic step command in the rated case | under the periodic step command in the parametric variation case | under the periodic sinusoid command in the rated case | under the periodic sinusoid command in the parametric variation case | under the step force disturbance with adding load in the 200um case | |
| Maximum error of | 10 µm | 13 µm | 8 µm | 12 µm | 20 µm | |
| RMS error of | 6 µm | 8 µm | 5 µm | 7 µm | 9 µm | |
| Precision (Relative standard deviation of ) at 200 µm position | 198.8 µm (±0.91%) | 197.9 µm (±1.51%) | 199.1 µm (±0.90%) | 198.0 µm (±1.40%) | 197.1 µm (±2.02%) | |
| Accuracy (Relative error of ) at 200 µm position | 97.0% (±3.0%) | 96.0% (±4.0%) | 97.5% (±2.5%) | 96.5% (±3.5%) | 95.5% (±4.5%) | |
| Control system | micrometer backstepping control system using switching function with upper bound | micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller | |
| Feature Performance | |||
| Oscillation in the control intensity of the linear motion single axis robot machine drive system | Larger within 20 µm | Smaller within 2 µm | |
| Dynamic response of the motion position of the linear motion single axis robot machine | Faster within 0.01 s | Fastest within 0.005 s | |
| Load regulation capability of the linear motion single axis robot machine | Good (maximum error as 28 µm with adding load in the 200 µm) | Best (maximum error as 20 µm with adding load in the 200 µm) | |
| Convergent speed of the motion position of the linear motion single axis robot machine | Faster within 0.002 s | Fastest within 0.001 s | |
| Position tracking error of the motion position of the linear motion single axis robot machine | Middle with maximum error of from 10 µm to 16 µm | Small with maximum error of from 8um to 13 µm | |
| Rejection capability for parameters disturbance of the motion position of the linear motion single axis robot machine | Good with maximum error of within 16um | Better with maximum error of within 13 µm | |
| Learning rate of the amended recurrent Gottlieb polynomials neural network | None | Vary (optimal rate) | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, C.-H.; Chang, K.-T. Micrometer Backstepping Control System for Linear Motion Single Axis Robot Machine Drive. Sensors 2019, 19, 3616. https://doi.org/10.3390/s19163616
Lin C-H, Chang K-T. Micrometer Backstepping Control System for Linear Motion Single Axis Robot Machine Drive. Sensors. 2019; 19(16):3616. https://doi.org/10.3390/s19163616
Chicago/Turabian StyleLin, Chih-Hong, and Kuo-Tsai Chang. 2019. "Micrometer Backstepping Control System for Linear Motion Single Axis Robot Machine Drive" Sensors 19, no. 16: 3616. https://doi.org/10.3390/s19163616
APA StyleLin, C. -H., & Chang, K. -T. (2019). Micrometer Backstepping Control System for Linear Motion Single Axis Robot Machine Drive. Sensors, 19(16), 3616. https://doi.org/10.3390/s19163616