Target Doppler Rate Estimation Based on the Complex Phase of STFT in Passive Forward Scattering Radar



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Chirp Rate Estimation
2.1. Theory Background
2.2. Analysis of the Estimation Accuracy
3. Results of the Simulation
- N = 1024—amount of points in FFT analysis,
- W = 350—Blackman-Harris window length (in samples),
- H = 1—hop-size (in samples),
- kHz—sampling rate.
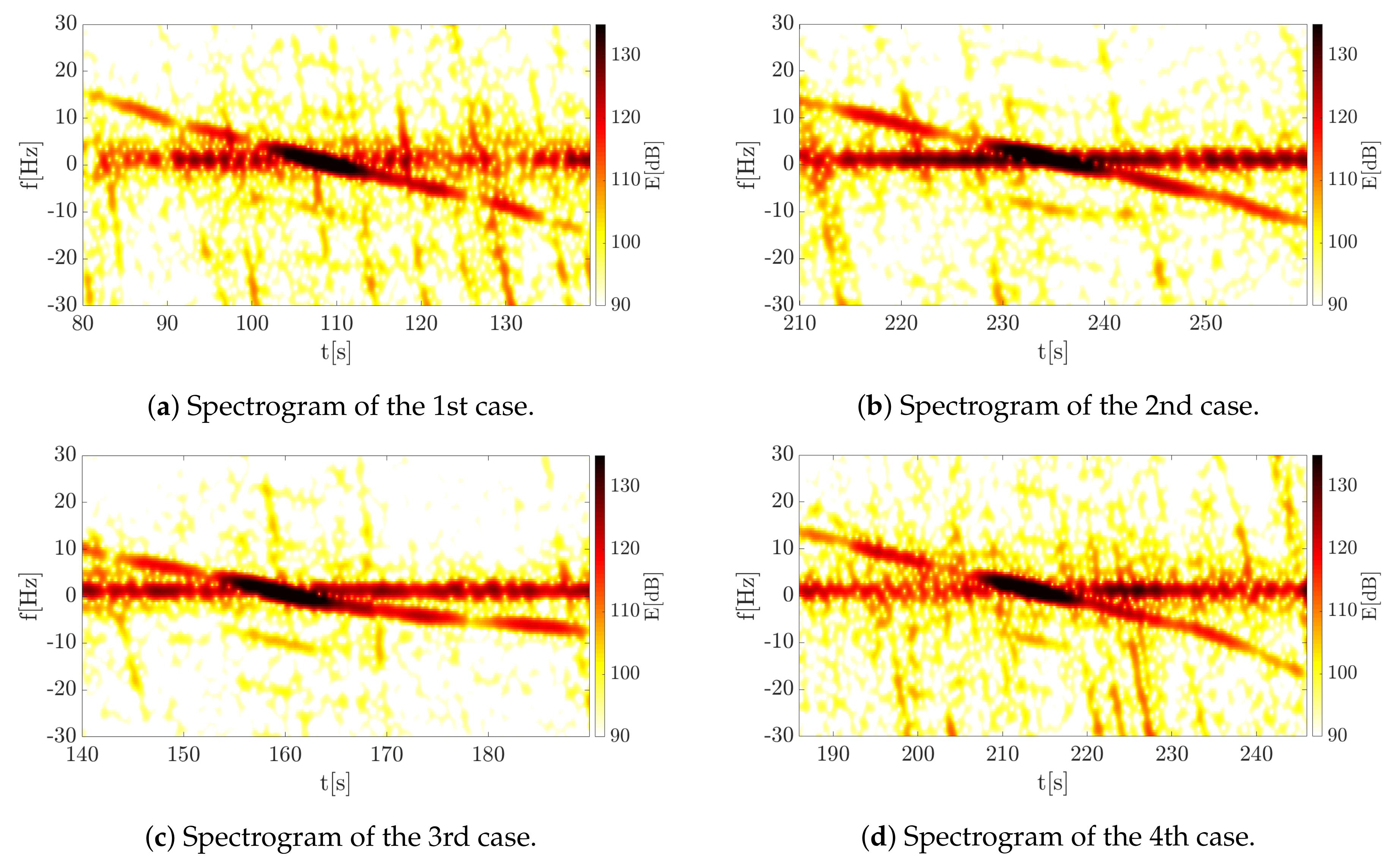
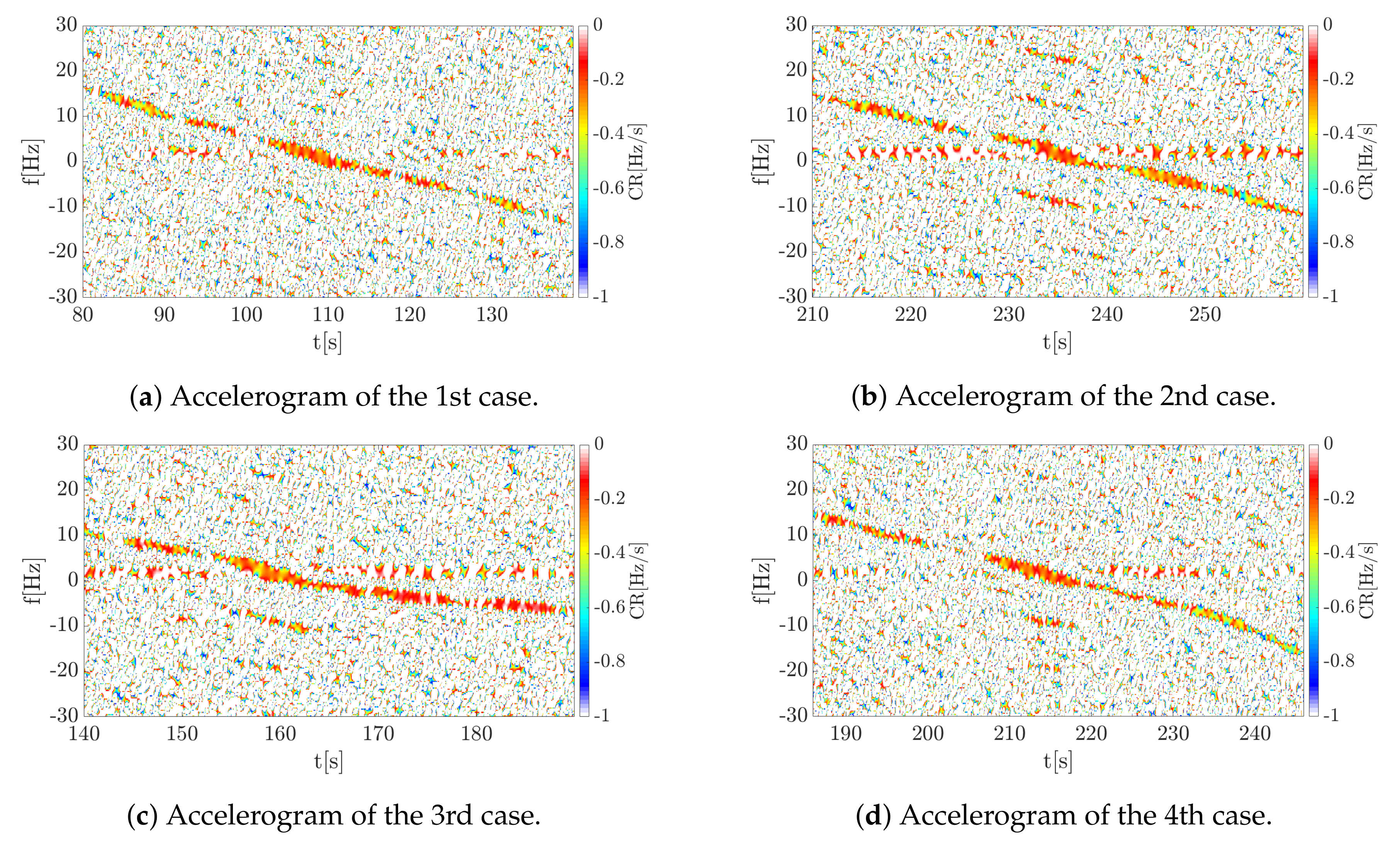
4. Real-Life Signal Analysis
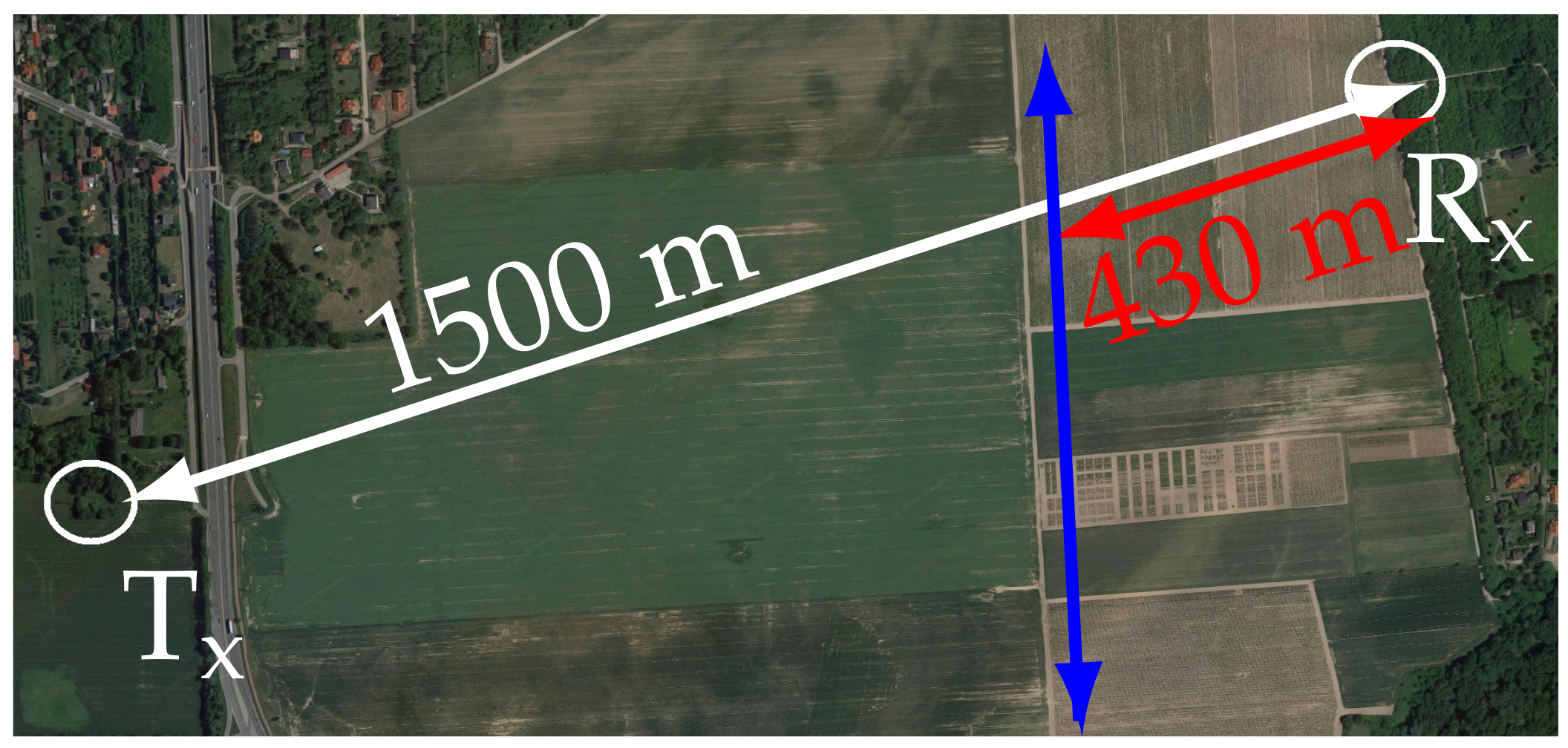
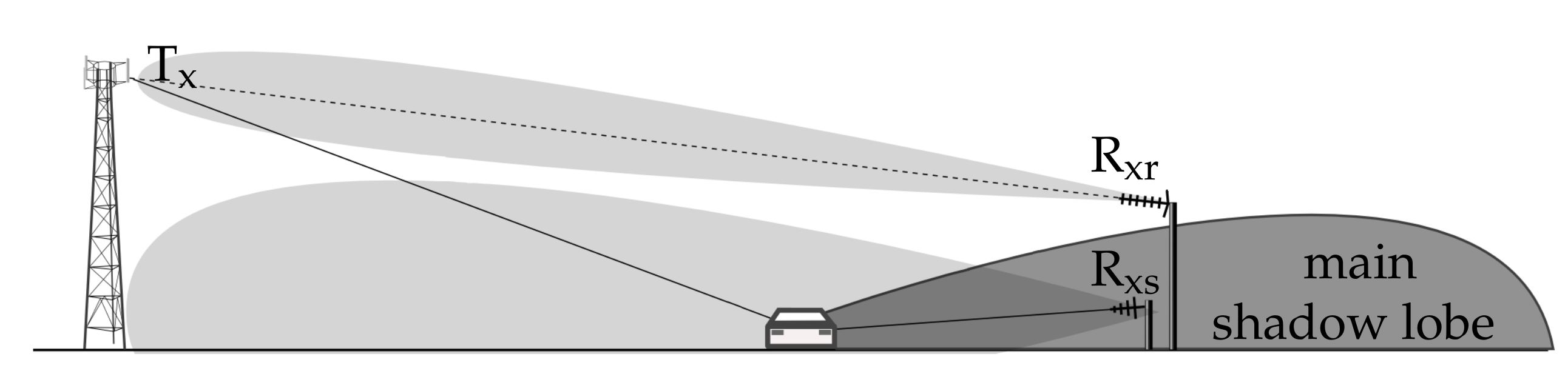
4.1. Measurement Campaign
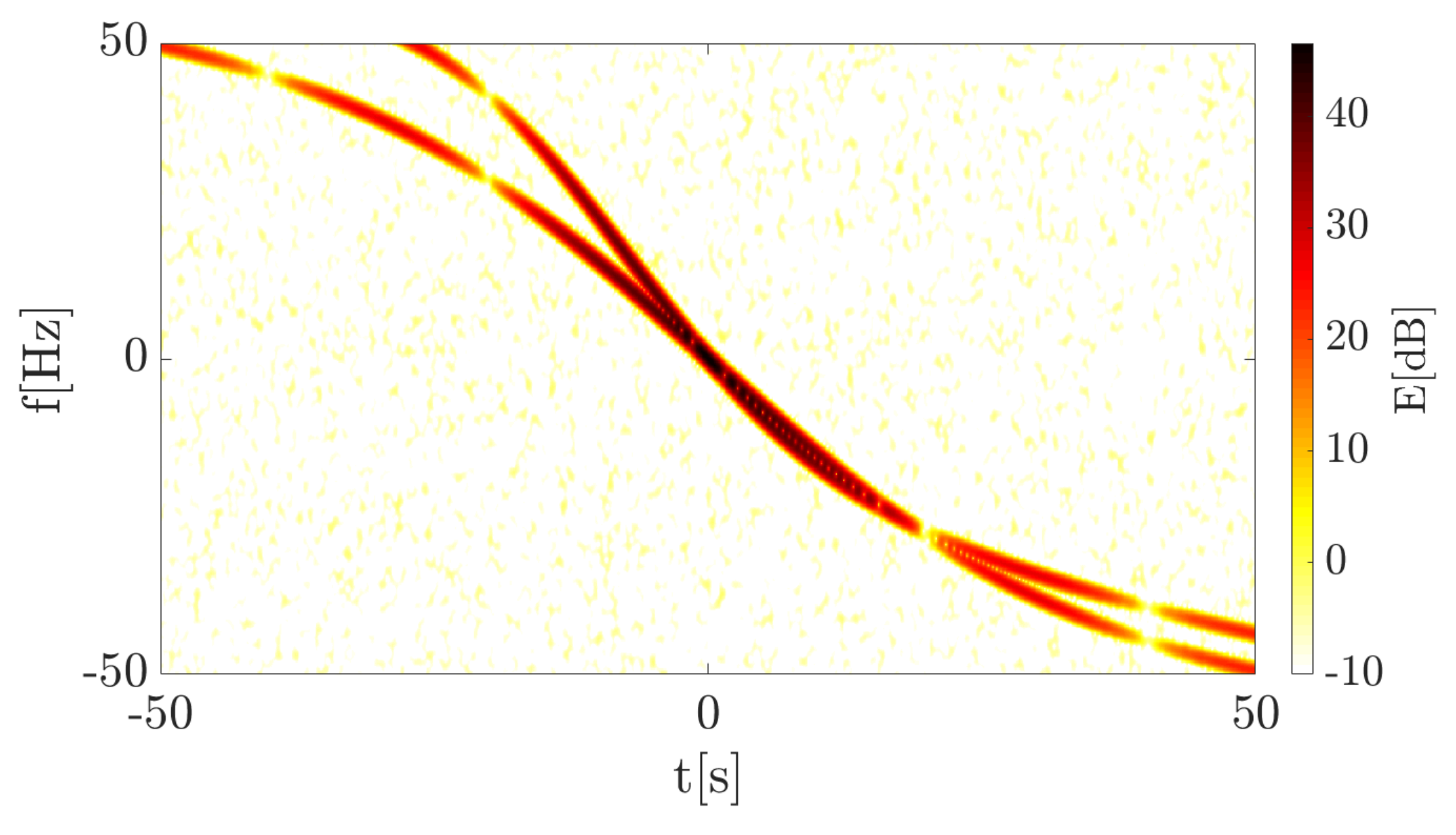
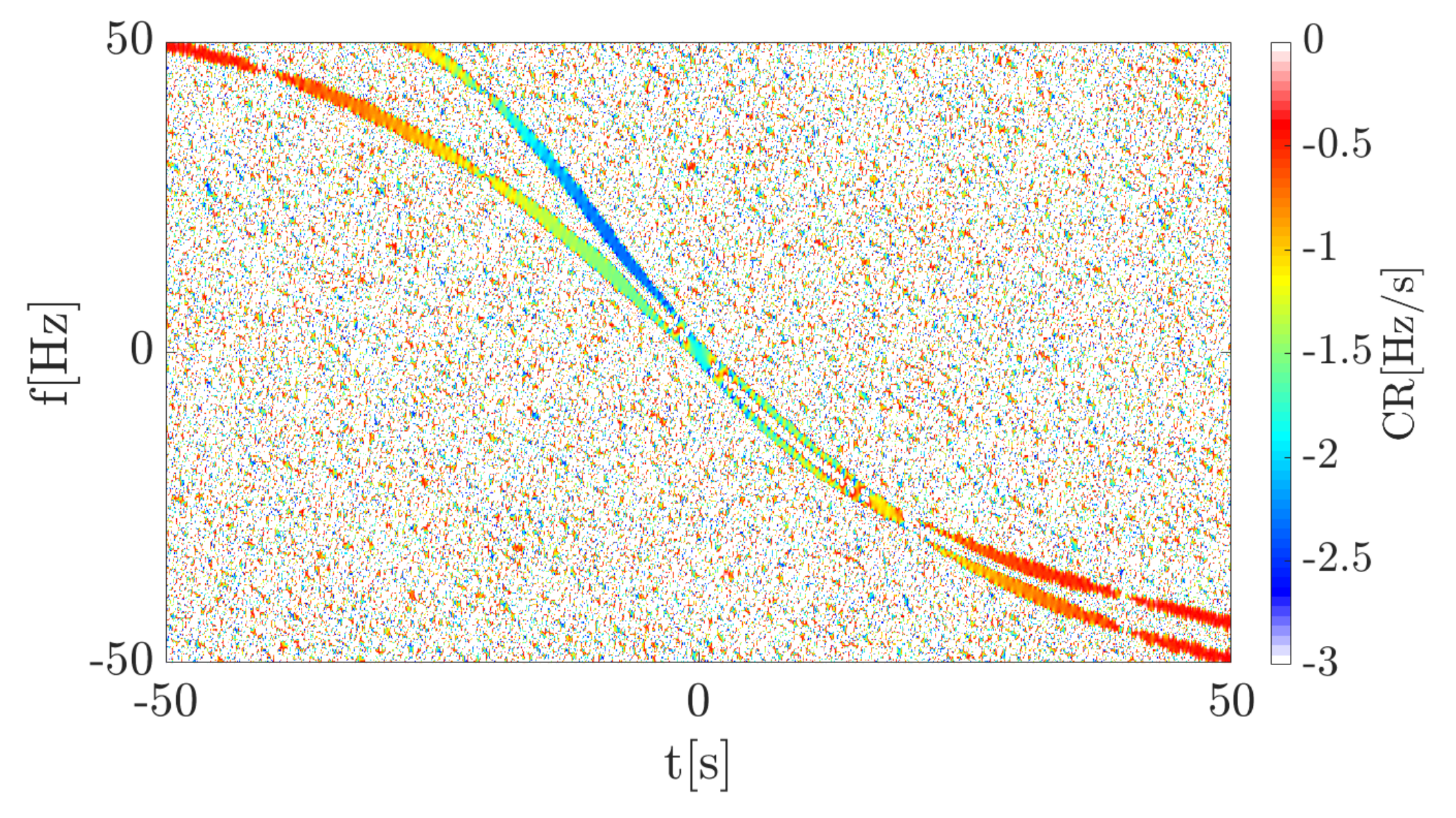
4.2. Target Doppler Rate Estimation
- N = 4096—amount of points in FFT analysis,
- W = 1300—Blackman-Harris window length (in samples),
- H = 1—hop-size (in samples),
- kHz—sampling rate (after decimation).
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cherniakov, M. Geometry of bistatic radars. In Bistatic Radar: Principles and Practice, Part II; Wiley: New York, NY, USA, 2007. [Google Scholar]
- Willis, N. Forward-scatter fences. In Bistatic Radar; SciTech Publishing: Raleigh, NC, USA, 2005. [Google Scholar]
- Cherniakov, M. Basic principles of forward-scattering radars. In Bistatic Radar: Principles and Practice, Part III; Wiley: New York, NY, USA, 2007. [Google Scholar]
- Edrich, M.; Schroeder, A.; Meyer, F. Design and performance evaluation of a mature FM/DAB/DVB-T multi-illuminator passive radar system. IET Radar Sonar Navig. 2014, 8, 114–122. [Google Scholar] [CrossRef]
- Krysik, P.; Kulpa, K.; Bączyk, M.; Maślikowski, L.; Samczyński, P. Ground moving vehicles velocity monitoring using a GSM based passive bistatic radar. In Proceedings of the 2011 IEEE CIE International Conference on Radar, Chengdu, China, 24–27 October 2011; pp. 781–784. [Google Scholar]
- O’Hagan, D.W.; Baker, C.J. Passive Bistatic Radar (PBR) using FM radio illuminators of opportunity. In Proceedings of the 2008 New Trends for Environmental Monitoring Using Passive Systems, Hyeres, French Riviera, France, 14–17 October 2008; pp. 1–6. [Google Scholar]
- Weiß, M. Compressive sensing for passive surveillance radar using DAB signals. In Proceedings of the 2014 International Radar Conference, Lille, France, 13–17 October 2014; pp. 1–6. [Google Scholar]
- Kuschel, H.; Cristallini, D.; Olsen, K.E. Tutorial: Passive radar tutorial. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 2–19. [Google Scholar] [CrossRef]
- Ustalli, N.; Pastina, D.; Lombardo, P. Kinematic parameters extraction from a single node Forward Scatter Radar configuration. In Proceedings of the 2018 19th International Radar Symposium (IRS), Bonn, Germany, 20–22 June 2018; pp. 1–10. [Google Scholar]
- Ustalli, N.; Pastina, D.; Lombardo, P. Target motion parameters estimation in Forward Scatter Radar. IEEE Trans. Aerosp. Electron. Syst. 2019. [Google Scholar] [CrossRef]
- Ustalli, N.; Pastina, D.; Bongioanni, C.; Lombardo, P. Motion parameters estimation in dual-baseline Forward Scatter Radar configuration. In Proceedings of the International Conference on Radar Systems (Radar 2017), Belfast, UK, 23–26 October 2017; pp. 1–6. [Google Scholar]
- Pastina, D.; Contu, M.; Lombardo, P.; Gashinova, M.; de Luca, A.; Daniem, L.; Cherniakov, M. Target motion estimation via multi-node forward scatter radar system. IET Radar Sonar Navig. 2016, 10, 3–14. [Google Scholar] [CrossRef]
- Contu, M.; de Luca, A.; Hristov, S.; Daniel, L.; Stove, A.; Gashinova, M.; Cherniakov, M.; Pastina, D.; Lombardo, P.; Baruzzi, A.; et al. Passive Multifrequency Forward-Scatter Radar Measurements of Airborne Targets Using Broadcasting Signals. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1067–1087. [Google Scholar] [CrossRef]
- Arcangeli, A.; Bongioanni, C.; Ustalli, N.; Pastina, D.; Lombardo, P. Passive forward scatter radar based on satellite TV broadcast for air target detection: Preliminary experimental results. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 1592–1596. [Google Scholar]
- Ustalli, N.; di Lello, F.; Pastina, D.; Bongioanni, C.; Rainaldi, S.; Lombardo, P. Two-dimensional filter bank design for velocity estimation in Forward Scatter Radar configuration. In Proceedings of the 2017 18th International Radar Symposium (IRS), Prague, Czech Republic, 28–30 June 2017; pp. 1–10. [Google Scholar]
- Czarnecki, K.; Moszyński, M. A novel method of local chirp-rate estimation of LFM chirp signals in the time-frequency domain. In Proceedings of the 2013 36th International Conference on Telecommunications and Signal Processing (TSP), Rome, Italy, 2–4 July 2013; pp. 704–708. [Google Scholar]
- Czarnecki, K. The instantaneous frequency rate spectrogram. Mech. Syst. Signal Process. 2016, 66, 361–373. [Google Scholar] [CrossRef]
- Hahn, S.L. On the uniqueness of the definition of the amplitude and phase of the analytic signal. Signal Process. 2003, 83, 1815–1820. [Google Scholar] [CrossRef]
- Fourer, D.; Auger, F.; Czarnecki, K.; Meignen, S.; Flandrin, P. Chirp Rate and Instantaneous Frequency Estimation: Application to Recursive Vertical Synchrosqueezing. IEEE Signal Process. Lett. 2017, 24, 1724–1728. [Google Scholar] [CrossRef]
- Abratkiewicz, K.; Czarnecki, K.; Fourer, D.; Auger, F. Estimation of time-frequency complex phase-based speech attributes using narrow band filter banks. In Proceedings of the 2017 Signal Processing Symposium (SPSympo), Jachranka, Poland, 12–14 September 2017; pp. 1–6. [Google Scholar]
- Abratkiewicz, K.; Samczyński, P.; Czarnecki, K. Radar Signal Parameters Estimation Using Phase Accelerogram in the Time-Frequency Domain. IEEE Sens. J. 2019, 19, 5078–5085. [Google Scholar] [CrossRef]
- Abratkiewicz, K.; Samczyński, P. A Block Method Utilizing the Instantaneous Chirp-Rate Estimation for Non-Linear Frequency Modulated Pulse Reconstruction. IEEE Trans. Aerosp. Electron. Syst. 2019. under review. [Google Scholar]
- Abratkiewicz, K.; Gromek, D.; Samczyński, P. Chirp Rate Estimation and micro-Doppler Signatures for Pedestrian Security Radar Systems. In Proceedings of the Signal Processing Symposium (SPSympo 2019), Krakow, Poland, 17–19 September 2019. [Google Scholar]
- Kay, S.M. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice Hall: Upper Saddle River, NJ, USA, 1997. [Google Scholar]
- Krysik, P.; Kulpa, K.; Samczyński, P. GSM based passive receiver using forward scatter radar geometry. In Proceedings of the 2013 14th International Radar Symposium (IRS), Dresden, Germany, 19–21 June 2013; pp. 637–642. [Google Scholar]














© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abratkiewicz, K.; Krysik, P.; Gajo, Z.; Samczyński, P. Target Doppler Rate Estimation Based on the Complex Phase of STFT in Passive Forward Scattering Radar. Sensors 2019, 19, 3627. https://doi.org/10.3390/s19163627
Abratkiewicz K, Krysik P, Gajo Z, Samczyński P. Target Doppler Rate Estimation Based on the Complex Phase of STFT in Passive Forward Scattering Radar. Sensors. 2019; 19(16):3627. https://doi.org/10.3390/s19163627
Chicago/Turabian StyleAbratkiewicz, Karol, Piotr Krysik, Zbigniew Gajo, and Piotr Samczyński. 2019. "Target Doppler Rate Estimation Based on the Complex Phase of STFT in Passive Forward Scattering Radar" Sensors 19, no. 16: 3627. https://doi.org/10.3390/s19163627
APA StyleAbratkiewicz, K., Krysik, P., Gajo, Z., & Samczyński, P. (2019). Target Doppler Rate Estimation Based on the Complex Phase of STFT in Passive Forward Scattering Radar. Sensors, 19(16), 3627. https://doi.org/10.3390/s19163627