Towards Model-Free Tool Dynamic Identification and Calibration Using Multi-Layer Neural Network

 ,
, 
 ,
,  ,
, 
Abstract
:1. Introduction
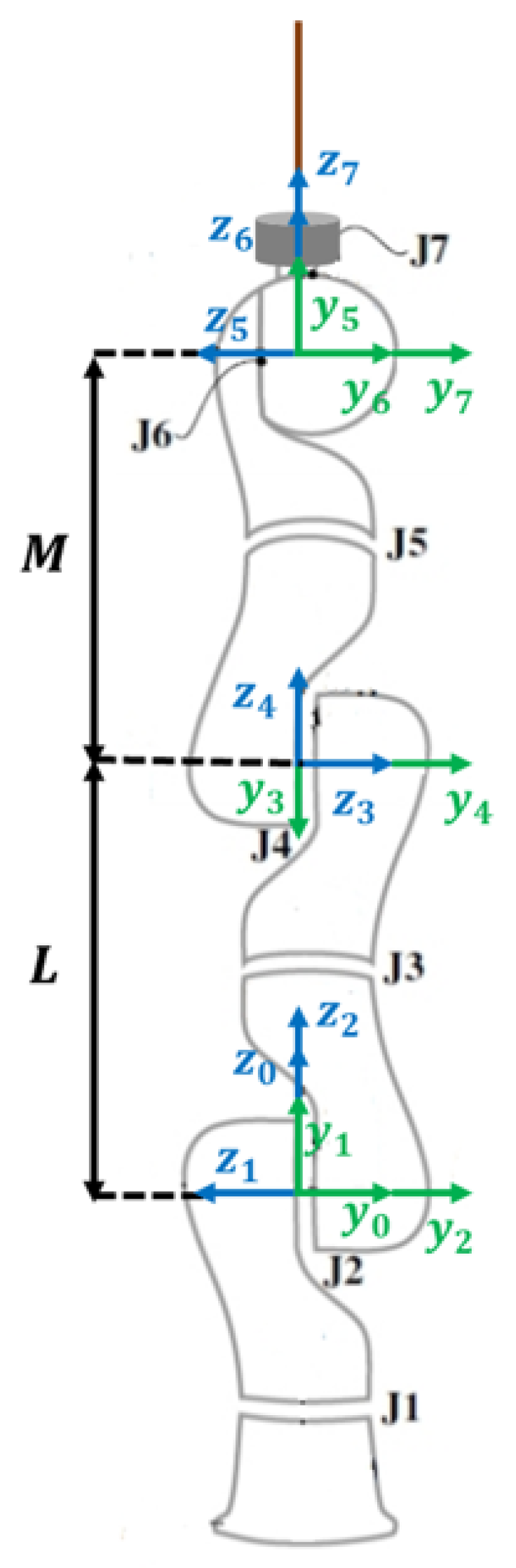
2. Kinematic Model of the Serial Robot
3. Methodology
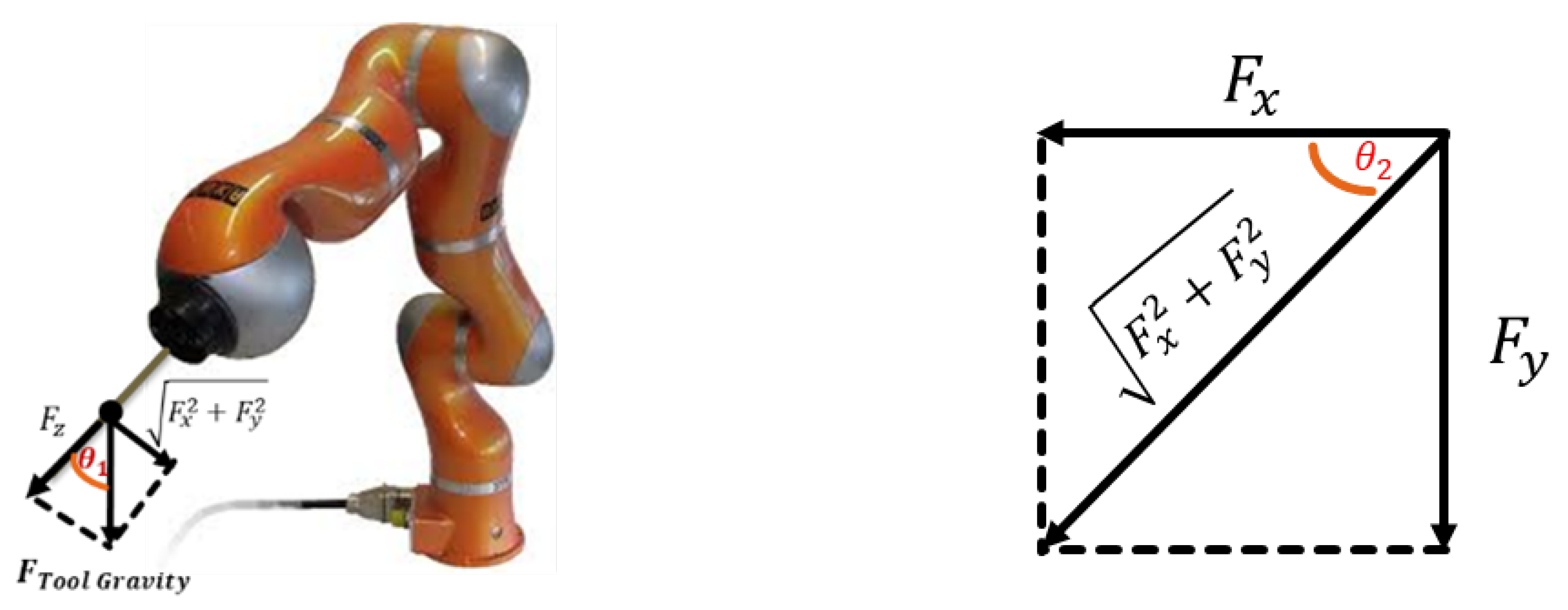
3.1. Tool Dynamics Identification
3.1.1. Model-Based Tool Gravity Identification Using Curve Fitting
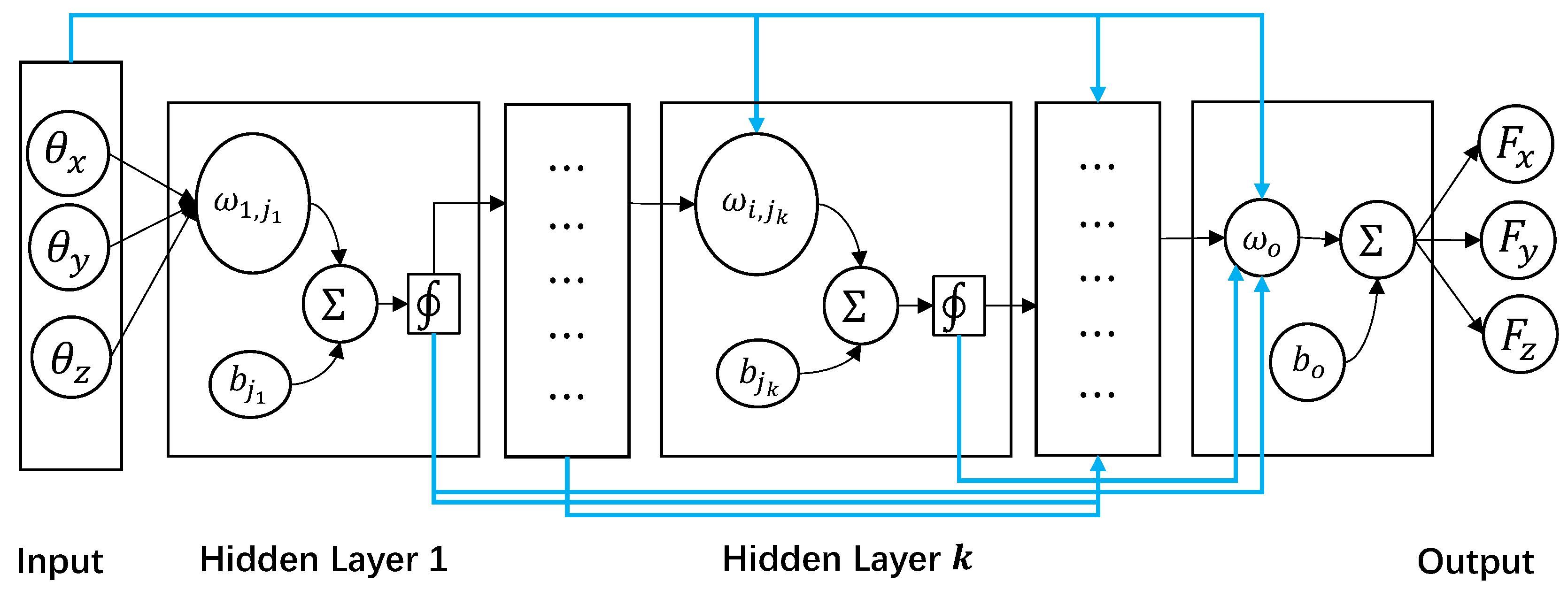
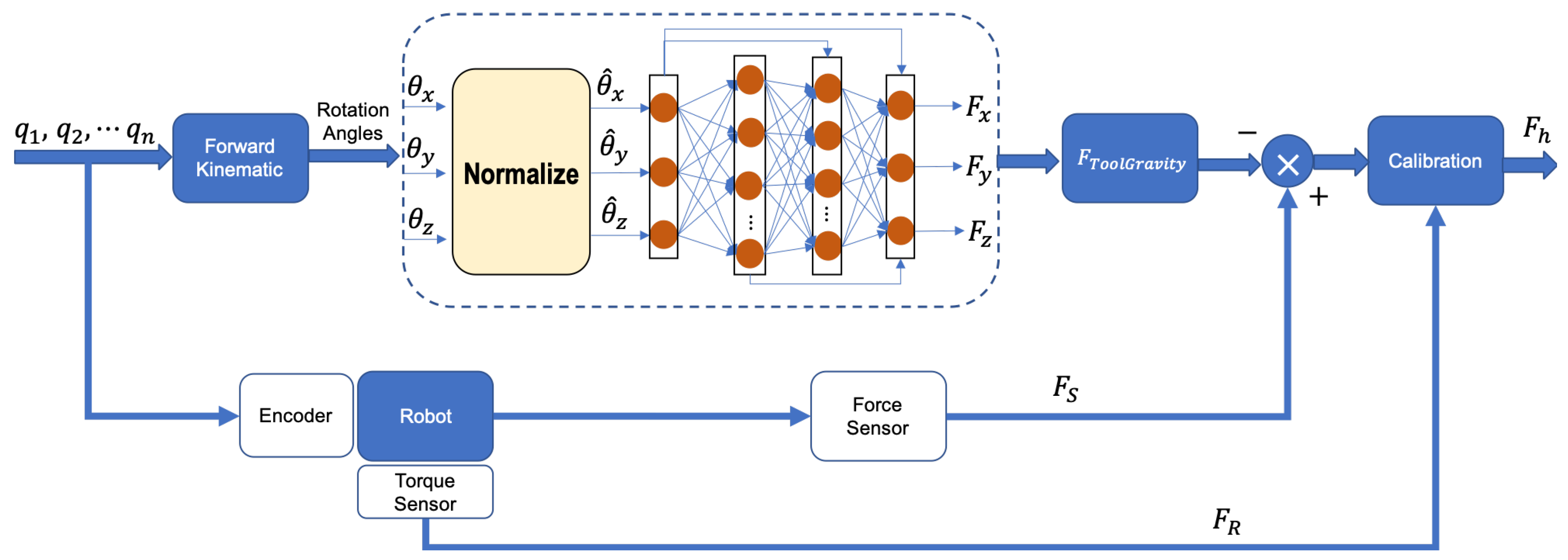
3.1.2. Model-Free Tool Gravity Identification Using Mnn
3.2. Force Sensor Calibration
4. Experimental Validation and Results
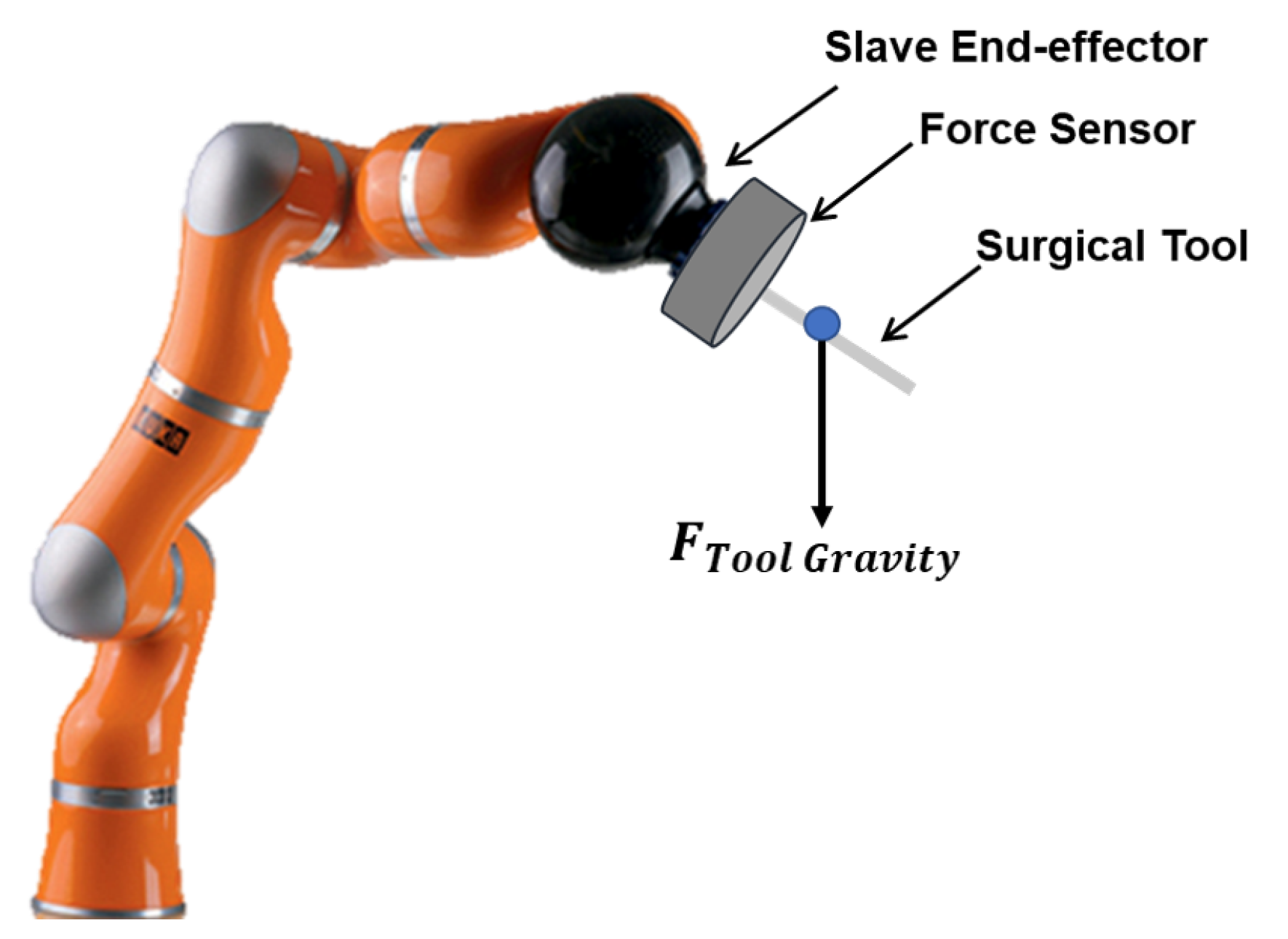
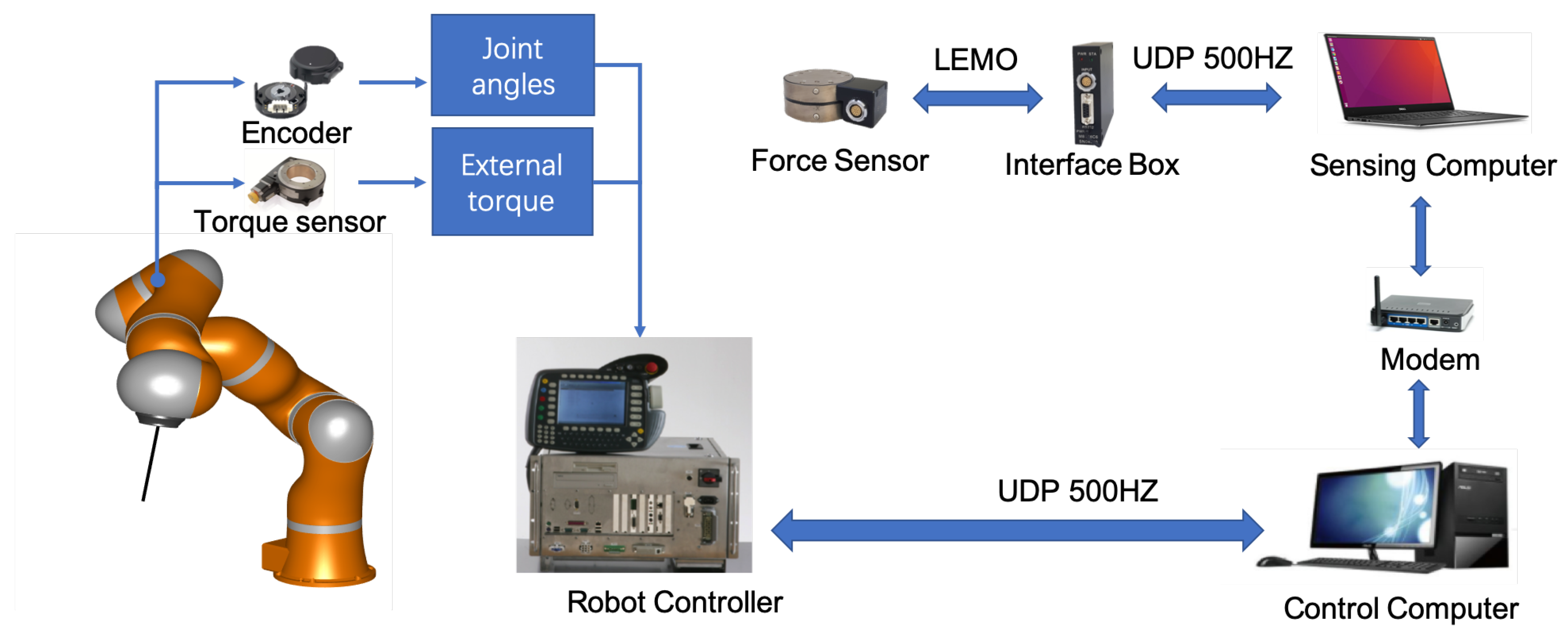
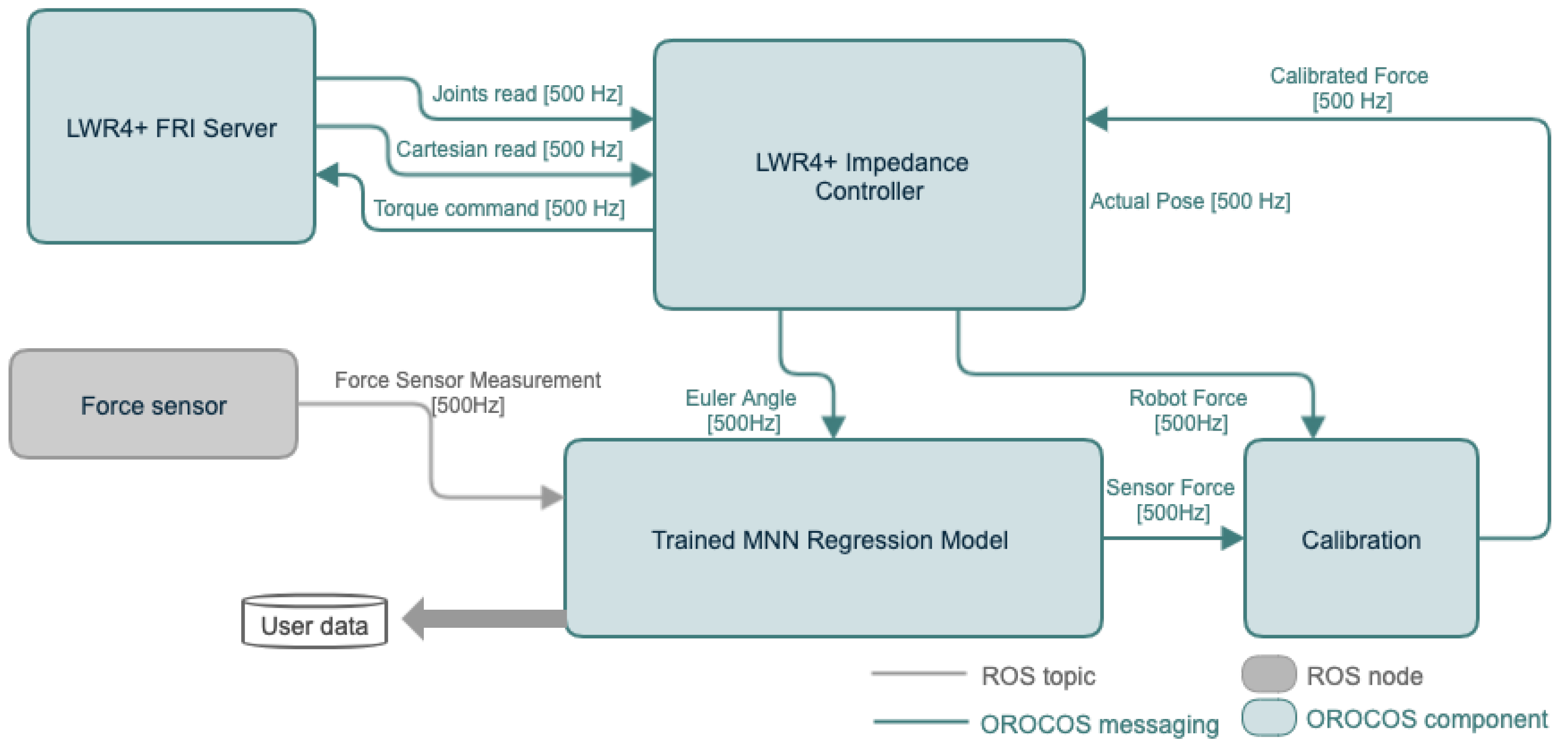
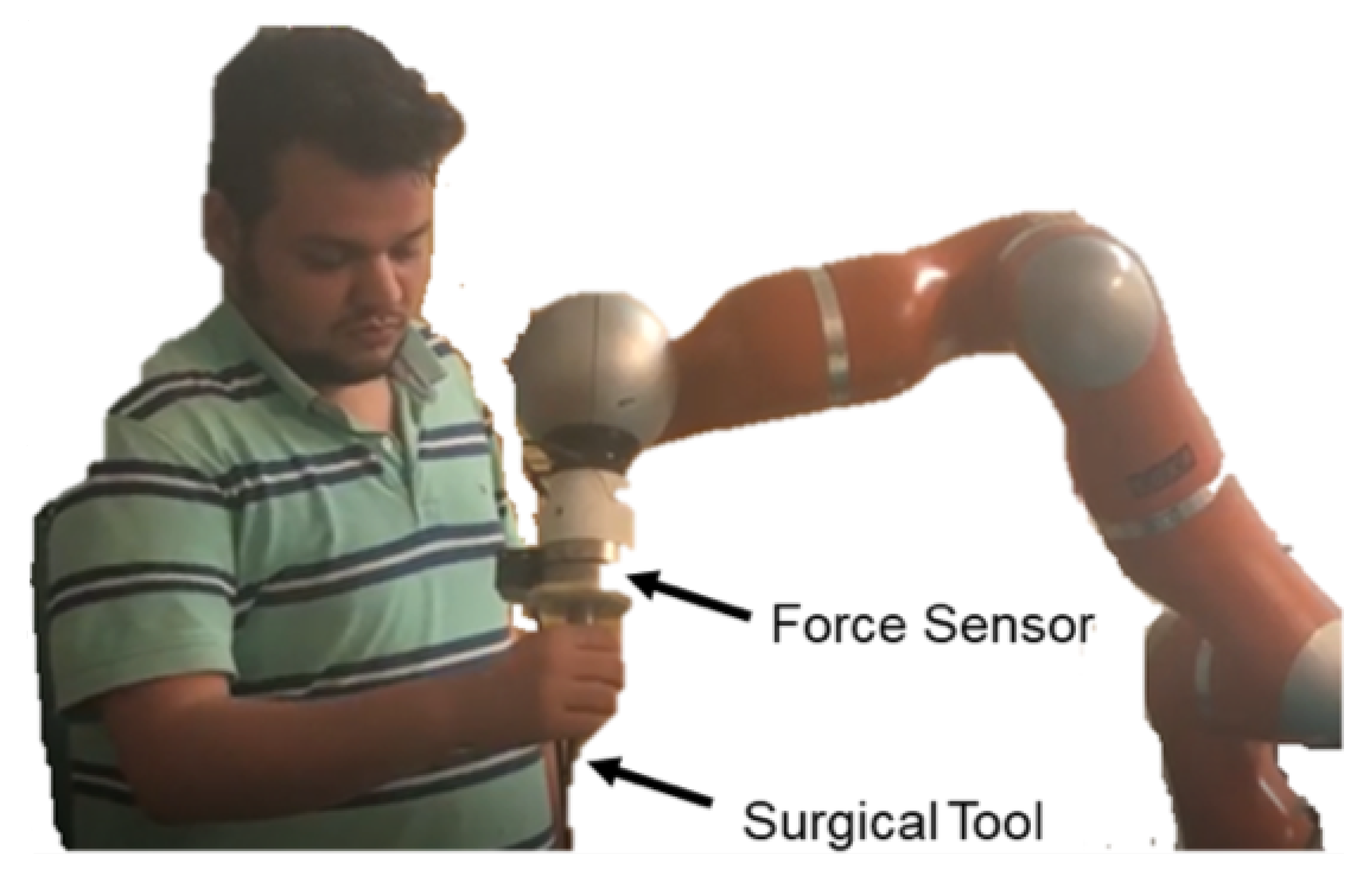
4.1. System Description
- a seven DoFs LightWeight robotic arm (LWR4+, KUKA, Augsburg, Germany) as slave device.
- a six-axis force sensor (M8128C6, SRI, Nanning, China) [42] that has the purpose of measuring interaction force between the surgical tool-tip and the environment.
4.2. Tool Dynamic Identification
4.2.1. Model-Based Tool Dynamic Identification Using Cf
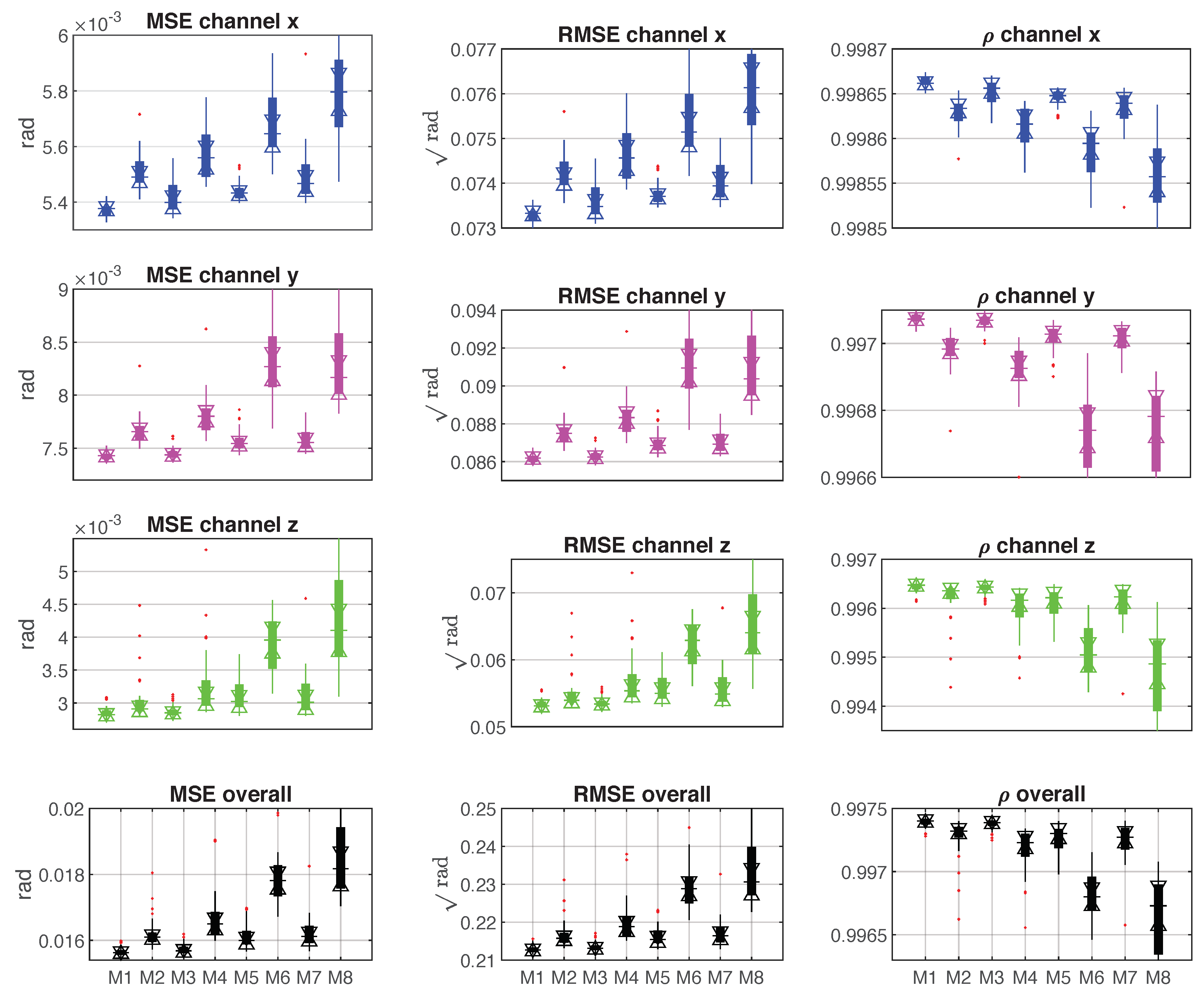
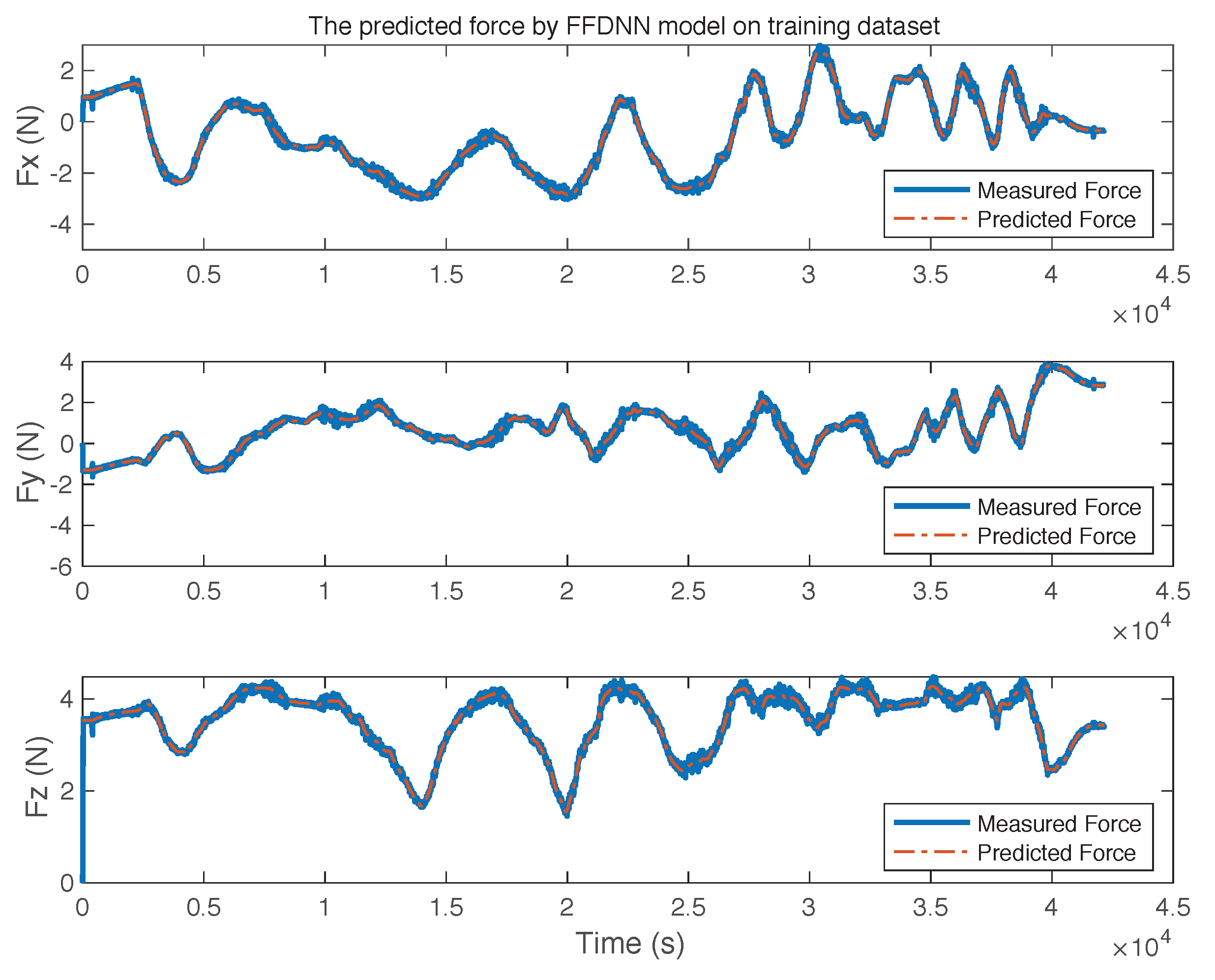
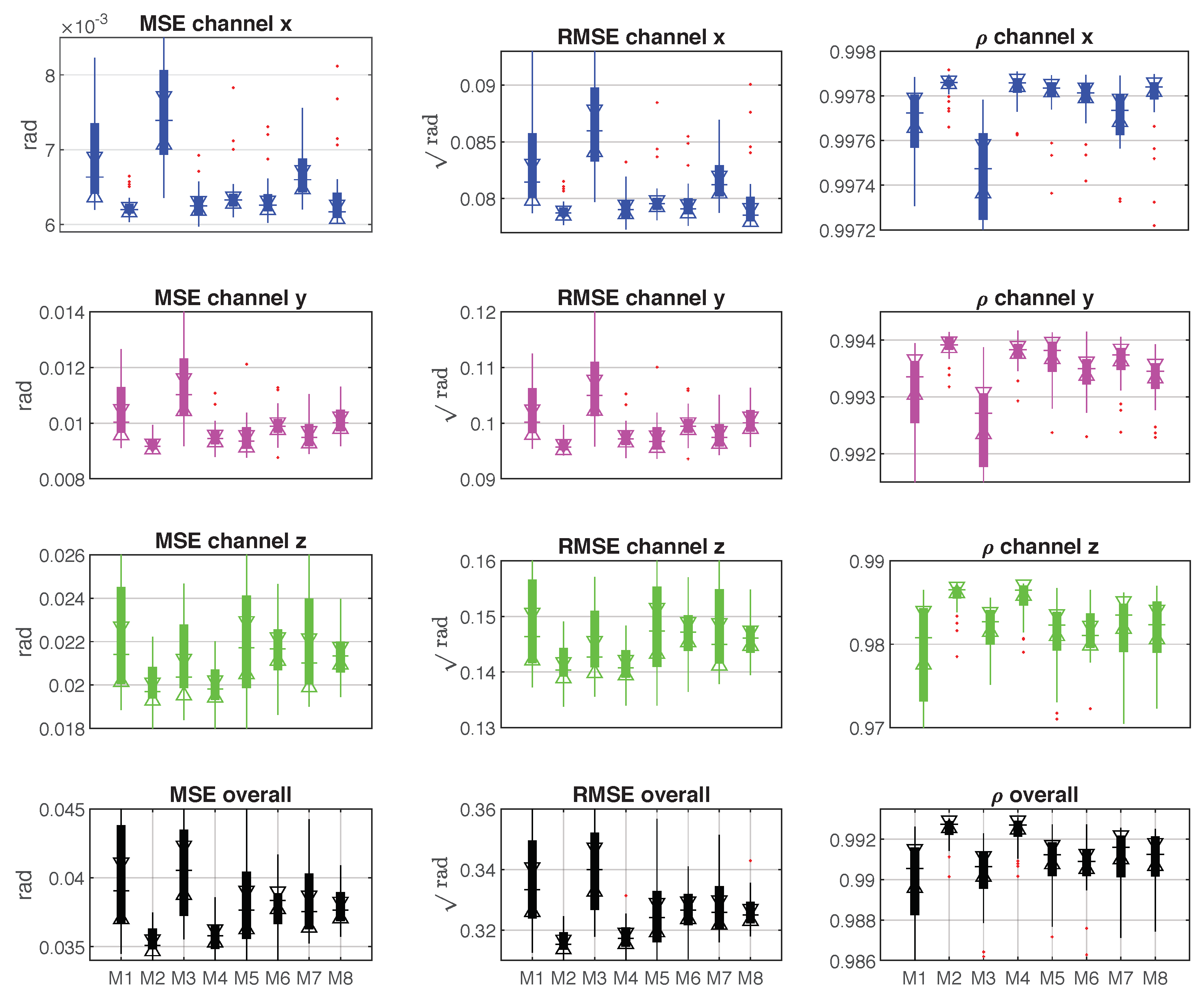
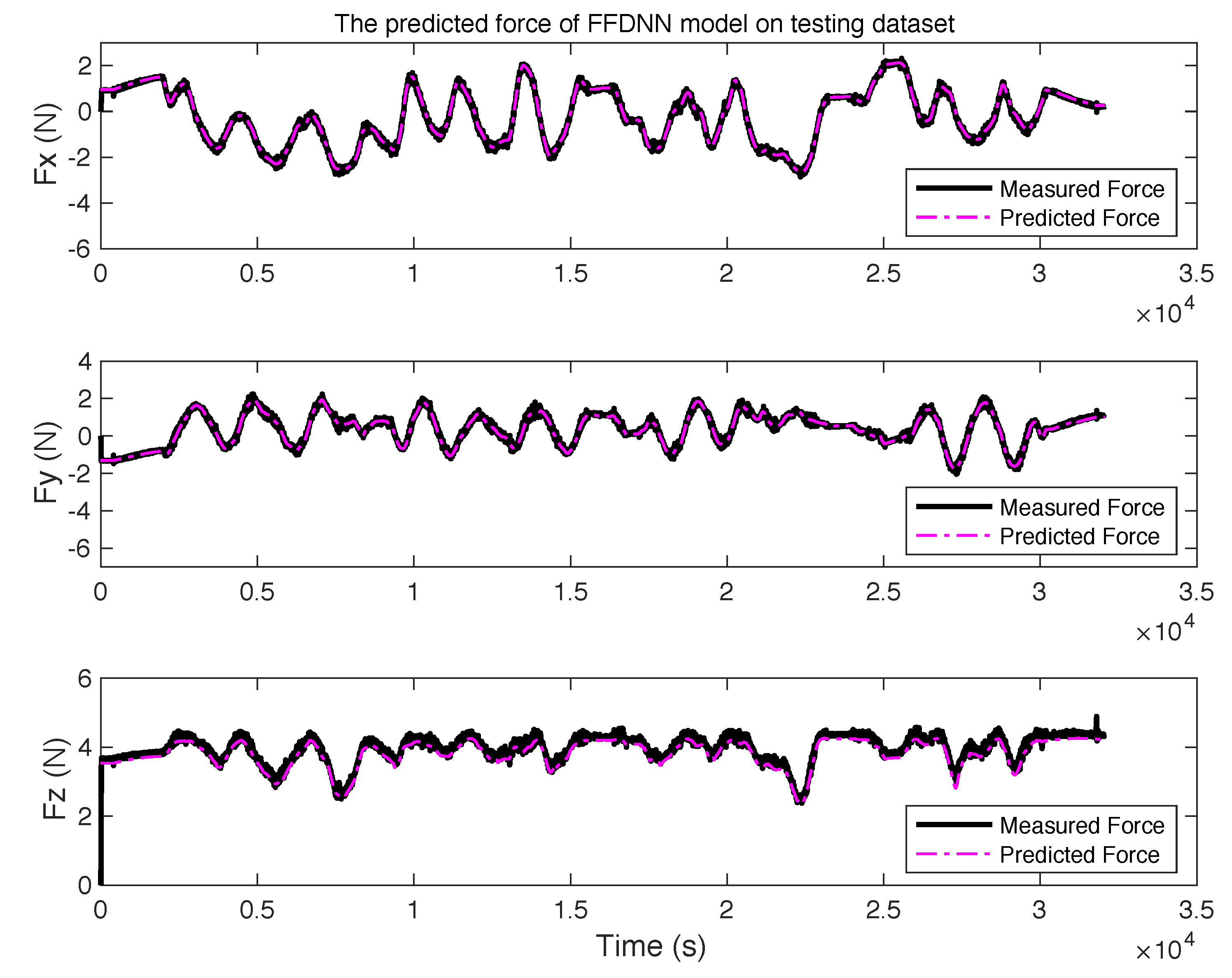
4.2.2. Model-Free Tool Dynamic Identification Using Mnn
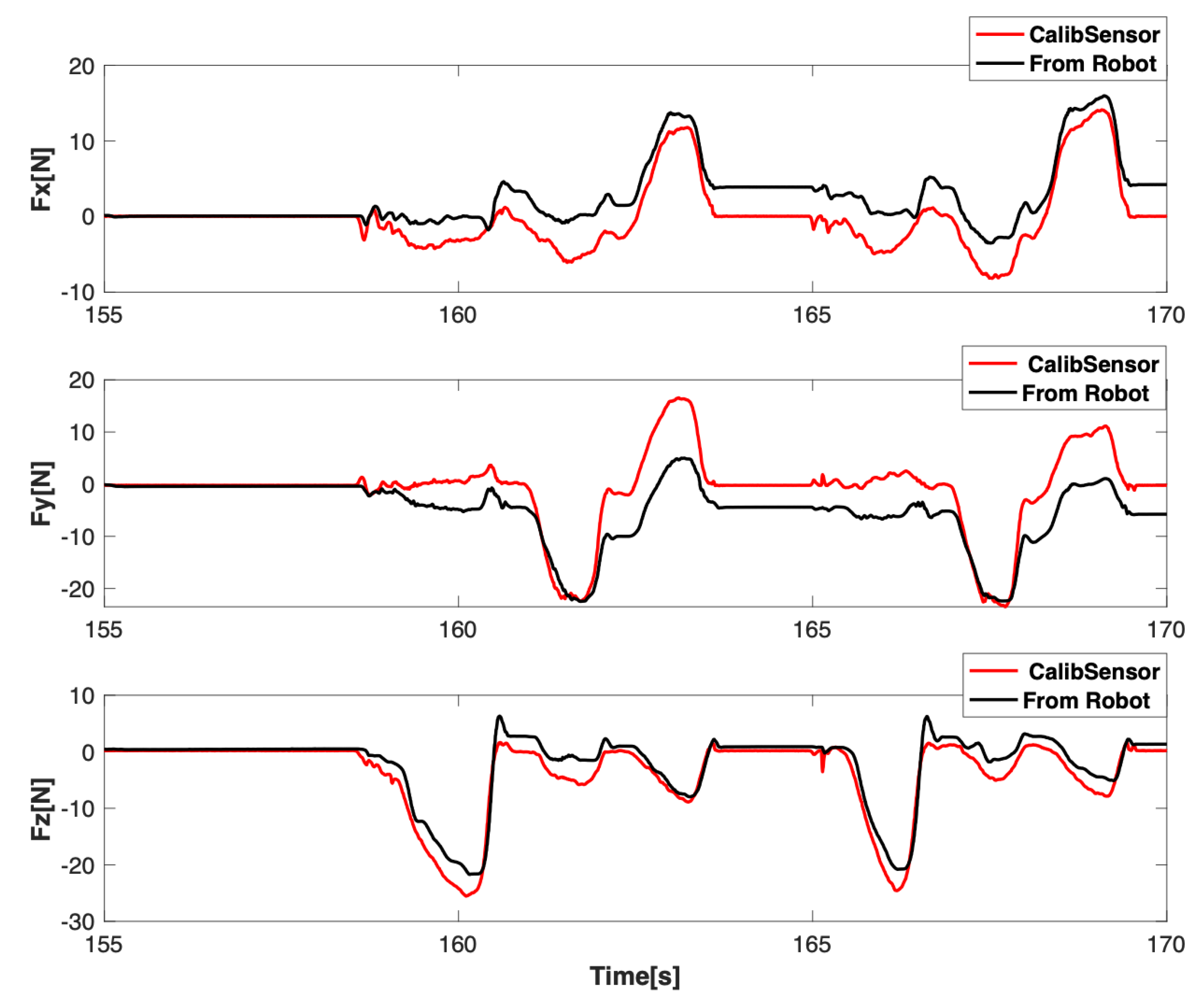
4.3. Force Sensor Calibration
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| MNN | Multi-layer neural network |
| CF | Curve fitting |
| FF-MNN | Feed-forward multi-layer neural network |
| CF-MNN | Cascade-forward Multi-layer neural network |
| FF-SNN | Feed-forward single layer neural network |
| CF-SNN | Cascade-forward single layer neural network |
| RA-MIS | Robot-assisted minimally invasive durgery |
| MIMO | Multi inputs multi outputs |
| SVD | Singular value decomposition |
| DoFs | Degrees of freedom |
| D-H | Denavit–Hartenberg |
| ROS | Robot Operating System |
| OROCOS | Open Robotic Control Software |
References
- Yang, C.; Chen, C.; Wang, N.; Ju, Z.; Fu, J.; Wang, M. Biologically-inspired motion modeling and neural control for robot learning from demonstrations. IEEE Trans. Cognit. Dev. Syst. 2019, 11, 281–291. [Google Scholar]
- Chen, Z.; Liang, B.; Zhang, T.; Wang, X. Bilateral teleoperation in cartesian space with time-varying delay. Int. J. Adv. Robot. Syst. 2012, 9, 110. [Google Scholar] [CrossRef]
- Kim, J.; Nguyen, P.B.; Kang, B.; Choi, E.; Park, J.O.; Kim, C.S. A Novel Tip-positioning Control of a Magnetically Steerable Guidewire in Sharply Curved Blood Vessel for Percutaneous Coronary Intervention. Int. J. Control Autom. Syst. 2019, 17, 2069–2082. [Google Scholar] [CrossRef]
- Hoang, M.C.; Le, V.H.; Kim, J.; Choi, E.; Kang, B.; Park, J.O.; Kim, C.S. Untethered Robotic Motion and Rotating Blade Mechanism for Actively Locomotive Biopsy Capsule Endoscope. IEEE Access 2019, 7, 93364–93374. [Google Scholar] [CrossRef]
- Yang, C.; Zeng, C.; Fang, C.; He, W.; Li, Z. A dmps-based framework for robot learning and generalization of humanlike variable impedance skills. IEEE/ASME Trans. Mechatron. 2018, 23, 1193–1203. [Google Scholar] [CrossRef]
- Hagn, U.; Ortmaier, T.; Konietschke, R.; Kubler, B.; Seibold, U.; Tobergte, A.; Nickl, M.; Jorg, S.; Hirzinger, G. Telemanipulator for remote minimally invasive surgery. IEEE Robot. Autom. Mag. 2008, 15, 28–38. [Google Scholar] [CrossRef]
- Tholey, G.; Desai, J.P.; Castellanos, A.E. Force feedback plays a significant role in minimally invasive surgery: Results and analysis. Ann. Surg. 2005, 241, 102. [Google Scholar] [PubMed]
- Demi, B.; Ortmaier, T.; Seibold, U. The touch and feel in minimally invasive surgery. In Proceedings of the IEEE International Workshop on Haptic Audio Visual Environments and their Applications, Ottawa, ON, Canada, 1 October 2005; p. 6. [Google Scholar]
- Oddo, C.; Valdastri, P.; Beccai, L.; Roccella, S.; Carrozza, M.; Dario, P. Investigation on calibration methods for multi-axis, linear and redundant force sensors. Meas. Sci. Technol. 2007, 18, 623. [Google Scholar] [CrossRef]
- Elatta, A.; Gen, L.P.; Zhi, F.L.; Daoyuan, Y.; Fei, L. An overview of robot calibration. Inf. Technol. J. 2004, 3, 74–78. [Google Scholar]
- Ma, Y.; Xie, S.; Zhang, X.; Luo, Y. Hybrid calibration method for six-component force/torque transducers of wind tunnel balance based on support vector machines. Chin. J. Aeronaut. 2013, 26, 554–562. [Google Scholar] [CrossRef] [Green Version]
- Faber, G.S.; Chang, C.C.; Kingma, I.; Schepers, H.M.; Herber, S.; Veltink, P.H.; Dennerlein, J.T. A force plate based method for the calibration of force/torque sensors. J. Biomech. 2012, 45, 1332–1338. [Google Scholar] [CrossRef] [PubMed]
- Roozbahani, H. Novel Control, Haptic and Calibration Methods for Teleoperated Electrohydraulic Servo Systems. Ph.D. Thesis, Lappeenranta University of Technology, Lappeenranta, Finland, 2015. [Google Scholar]
- Yang, J.; Su, H.; Li, Z.; Ao, D.; Song, R. Adaptive control with a fuzzy tuner for cable-based rehabilitation robot. Int. J. Control Autom. Syst. 2016, 14, 865–875. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, T.; Chen, F.; Hu, Y.; Su, C.Y.; Fukuda, T. Reinforcement learning of manipulation and grasping using dynamical movement primitives for a humanoidlike mobile manipulator. IEEE/ASME Trans. Mechatron. 2017, 23, 121–131. [Google Scholar] [CrossRef]
- Zernetsch, S.; Kohnen, S.; Goldhammer, M.; Doll, K.; Sick, B. Trajectory prediction of cyclists using a physical model and an artificial neural network. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 833–838. [Google Scholar]
- Zhang, X.; Li, J.; Hu, Z.; Qi, W.; Zhang, L.; Hu, Y.; Su, H.; Ferrigno, G.; Momi, E.D. Novel Design and Lateral Stability Tracking Control of a Four-Wheeled Rollator. Appl. Sci. 2019, 9, 2327. [Google Scholar] [CrossRef]
- Hu, Y.; Su, H.; Zhang, L.; Miao, S.; Chen, G.; Knoll, A. Nonlinear Model Predictive Control for Mobile Robot Using Varying-Parameter Convergent Differential Neural Network. Robotics 2019, 8, 64. [Google Scholar] [CrossRef]
- Wyles, D.; Dvory-Sobol, H.; Svarovskaia, E.S.; Doehle, B.P.; Martin, R.; Afdhal, N.H.; Kowdley, K.V.; Lawitz, E.; Brainard, D.M.; Miller, M.D.; et al. Post-treatment resistance analysis of hepatitis C virus from phase II and III clinical trials of ledipasvir/sofosbuvir. J. Hepatol. 2017, 66, 703–710. [Google Scholar] [CrossRef]
- RymARczyk, T.; Kłosowski, G. Application of neural reconstruction of tomographic images in the problem of reliability of flood protection facilities. Eksploat. I Niezawodn. 2018, 20, 425–434. [Google Scholar] [CrossRef]
- Golkarian, A.; Naghibi, S.A.; Kalantar, B.; Pradhan, B. Groundwater potential mapping using C5. 0, random forest, and multivariate adaptive regression spline models in GIS. Environ. Monit. Assess. 2018, 190, 149. [Google Scholar] [CrossRef]
- Aditian, A.; Kubota, T.; Shinohara, Y. Comparison of GIS-based landslide susceptibility models using frequency ratio, logistic regression, and artificial neural network in a tertiary region of Ambon, Indonesia. Geomorphology 2018, 318, 101–111. [Google Scholar] [CrossRef]
- Su, H.; Enayati, N.; Vantadori, L.; Spinoglio, A.; Ferrigno, G.; De Momi, E. Online human-like redundancy optimization for tele-operated anthropomorphic manipulators. Int. J. Adv. Robot. Syst. 2018, 15. [Google Scholar] [CrossRef]
- Li, Z.; Yang, C.; Fan, L. Advanced Control of Wheeled Inverted Pendulum Systems; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Hu, Y.; Wu, X.; Geng, P.; Li, Z. Evolution Strategies Learning With Variable Impedance Control for Grasping Under Uncertainty. IEEE Trans. Ind. Electron. 2018, 66, 7788–7799. [Google Scholar] [CrossRef]
- Sheth, P.N.; Uicker, J.J. A generalized symbolic notation for mechanisms. J. Eng. Ind. 1971, 93, 102–112. [Google Scholar] [CrossRef]
- Gaz, C.; Flacco, F.; De Luca, A. Identifying the dynamic model used by the KUKA LWR: A reverse engineering approach. In Proceedings of the 2014 IEEE international conference on robotics and automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 1386–1392. [Google Scholar]
- Nguyen, H.N.; Zhou, J.; Kang, H.J. A calibration method for enhancing robot accuracy through integration of an extended Kalman filter algorithm and an artificial neural network. Neurocomputing 2015, 151, 996–1005. [Google Scholar] [CrossRef]
- Rocha, C.; Tonetto, C.; Dias, A. A comparison between the Denavit–Hartenberg and the screw-based methods used in kinematic modeling of robot manipulators. Robot. Comput.-Integr. Manuf. 2011, 27, 723–728. [Google Scholar] [CrossRef]
- Su, H.; Yang, C.; Mdeihly, H.; Rizzo, A.; Ferrigno, G.; De Momi, E. Neural Network Enhanced Robot Tool Identification and Calibration for Bilateral Teleoperation. IEEE Access 2019. [Google Scholar] [CrossRef]
- Afrand, M.; Esfe, M.H.; Abedini, E.; Teimouri, H. Predicting the effects of magnesium oxide nanoparticles and temperature on the thermal conductivity of water using artificial neural network and experimental data. Phys. E Low-Dimens. Syst. Nanostruct. 2017, 87, 242–247. [Google Scholar] [CrossRef]
- Fister, I.; Suganthan, P.N.; Kamal, S.M.; Al-Marzouki, F.M.; Perc, M.; Strnad, D. Artificial neural network regression as a local search heuristic for ensemble strategies in differential evolution. Nonlinear Dyn. 2016, 84, 895–914. [Google Scholar] [CrossRef]
- Goyal, S.; Goyal, G.K. Cascade and feedforward backpropagation artificial neural networks models for prediction of sensory quality of instant coffee flavoured sterilized drink. Can. J. Artif. Intell. Mach. Learn. Pattern Recognit. 2011, 2, 78–82. [Google Scholar]
- Abujazar, M.S.S.; Fatihah, S.; Ibrahim, I.A.; Kabeel, A.; Sharil, S. Productivity modelling of a developed inclined stepped solar still system based on actual performance and using a cascaded forward neural network model. J. Clean. Prod. 2018, 170, 147–159. [Google Scholar] [CrossRef]
- Kou, C.X.; Dai, Y.H. A modified self-scaling memoryless Broyden–Fletcher–Goldfarb–Shanno method for unconstrained optimization. J. Optim. Theory Appl. 2015, 165, 209–224. [Google Scholar] [CrossRef]
- Enayati, N.; De Momi, E.; Ferrigno, G. A quaternion-based unscented Kalman filter for robust optical/inertial motion tracking in computer-assisted surgery. IEEE Trans. Instrum. Meas. 2015, 64, 2291–2301. [Google Scholar] [CrossRef]
- Papadopoulo, T.; Lourakis, M.I. Estimating the jacobian of the singular value decomposition: Theory and applications. In European Conference on Computer Vision; Springer: Berlin, Germany, 2000; pp. 554–570. [Google Scholar]
- Kim, K.; Sun, Y.; Voyles, R.M.; Nelson, B.J. Calibration of multi-axis MEMS force sensors using the shape-from-motion method. IEEE Sens. J. 2007, 7, 344–351. [Google Scholar] [CrossRef]
- Su, H.; Yang, C.; Ferrigno, G.; De Momi, E. Improved human-robot collaborative control of redundant robot for teleoperated minimally invasive surgery. IEEE Robot. Autom. Lett. 2019, 4, 1447–1453. [Google Scholar] [CrossRef]
- Su, H.; Sandoval, J.; Vieyres, P.; Poisson, G.; Ferrigno, G.; De Momi, E. Safety-enhanced collaborative framework for tele-operated minimally invasive surgery using a 7-DoF torque-controlled robot. Int. J. Control Autom. Syst. 2018, 16, 2915–2923. [Google Scholar] [CrossRef]
- Su, H.; Sandoval, J.; Makhdoomi, M.; Ferrigno, G.; De Momi, E. Safety-enhanced human-robot interaction control of redundant robot for teleoperated minimally invasive surgery. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 6611–6616. [Google Scholar]
- Su, H.; Li, S.; Manivannan, J.; Bascetta, L.; Ferrigno, G.; De Momi, E. Manipulability Optimization Control of a Serial Redundant Robot for Robot-assisted Minimally Invasive Surgery. In Proceedings of the 2019 IEEE International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Li, S.; He, J.; Li, Y.; Rafique, M.U. Distributed recurrent neural networks for cooperative control of manipulators: A game-theoretic perspective. IEEE Trans. Neural Netw. Learn. Syst. 2016, 28, 415–426. [Google Scholar] [CrossRef] [PubMed]
- Hu, Y.; Li, Z.; Li, G.; Yuan, P.; Yang, C.; Song, R. Development of sensory-motor fusion-based manipulation and grasping control for a robotic hand-eye system. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 1169–1180. [Google Scholar] [CrossRef]
- Li, S.; Shao, Z.; Guan, Y. A dynamic neural network approach for efficient control of manipulators. IEEE Trans. Syst. Man Cybern. Syst. 2017, 49, 932–941. [Google Scholar] [CrossRef]
- Yang, C.; Zeng, C.; Cong, Y.; Wang, N.; Wang, M. A learning framework of adaptive manipulative skills from human to robot. IEEE Trans. Ind. Inform. 2018, 15, 1153–1161. [Google Scholar] [CrossRef]
- Li, S.; Zhou, M.; Luo, X. Modified primal-dual neural networks for motion control of redundant manipulators with dynamic rejection of harmonic noises. IEEE Trans. Neural Netw. Learn. Syst. 2017, 29, 4791–4801. [Google Scholar] [CrossRef]
- Li, Z.; Su, C.Y.; Li, G.; Su, H. Fuzzy approximation-based adaptive backstepping control of an exoskeleton for human upper limbs. IEEE Trans. Fuzzy Syst. 2014, 23, 555–566. [Google Scholar] [CrossRef]
- Li, Z.; Xiao, S.; Ge, S.S.; Su, H. Constrained multilegged robot system modeling and fuzzy control with uncertain kinematics and dynamics incorporating foot force optimization. IEEE Trans. Syst. Man Cybern. Syst. 2015, 46, 1–15. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link | ||||
|---|---|---|---|---|
| 1 | 0 | 0 | ||
| 2 | 0 | 0 | ||
| 3 | 0 | L | ||
| 4 | 0 | 0 | ||
| 5 | 0 | M | ||
| 6 | 0 | 0 | ||
| 7 | 0 | 0 | 0 |
| Label | M1 | M2 | M3 | M4 | M5 | M6 | M7 | M8 |
|---|---|---|---|---|---|---|---|---|
| model | CF-MNN | CF-MNN | FF-MNN | FF-MNN | CF-SNN | CF-SNN | FF-SNN | FF-SNN |
| nodes | [30,15] | [9,6] | [30,15] | [9,6] | [30] | [9] | [30] | [9] |
| Model | CF-MNN | CF-MNN | FF-MNN | FF-MNN |
| Time (s) | 53.33 ± 10.66 | 26.52 ± 5.71 | 46.19 ± 15.67 | 20.78 ± 4.31 |
| Model | CF-SNN | CF-SNN | FF-SNN | FF-SNN |
| Time (s) | 23.62 ± 5.44 | 17.06 ± 5.37 | 25.41 ± 6.93 | 19.49 ± 7.37 |
| Model | CF-MNN | CF-MNN | FF-MNN | FF-MNN |
| Time (s) | 0.0271 ± 0.0053 | 0.0230 ± 0.0017 | 0.0178 ± 0.0010 | 0.0158 ± 0.0015 |
| Model | CF-SNN | CF-SNN | FF-SNN | FF-SNN |
| Time (s) | 0.0182 ± 0.0013 | 0.0172 ± 0.0010 | 0.0138 ± 0.0017 | 0.0130 ± 0.0010 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, H.; Qi, W.; Hu, Y.; Sandoval, J.; Zhang, L.; Schmirander, Y.; Chen, G.; Aliverti, A.; Knoll, A.; Ferrigno, G.; et al. Towards Model-Free Tool Dynamic Identification and Calibration Using Multi-Layer Neural Network. Sensors 2019, 19, 3636. https://doi.org/10.3390/s19173636
Su H, Qi W, Hu Y, Sandoval J, Zhang L, Schmirander Y, Chen G, Aliverti A, Knoll A, Ferrigno G, et al. Towards Model-Free Tool Dynamic Identification and Calibration Using Multi-Layer Neural Network. Sensors. 2019; 19(17):3636. https://doi.org/10.3390/s19173636
Chicago/Turabian StyleSu, Hang, Wen Qi, Yingbai Hu, Juan Sandoval, Longbin Zhang, Yunus Schmirander, Guang Chen, Andrea Aliverti, Alois Knoll, Giancarlo Ferrigno, and et al. 2019. "Towards Model-Free Tool Dynamic Identification and Calibration Using Multi-Layer Neural Network" Sensors 19, no. 17: 3636. https://doi.org/10.3390/s19173636
APA StyleSu, H., Qi, W., Hu, Y., Sandoval, J., Zhang, L., Schmirander, Y., Chen, G., Aliverti, A., Knoll, A., Ferrigno, G., & De Momi, E. (2019). Towards Model-Free Tool Dynamic Identification and Calibration Using Multi-Layer Neural Network. Sensors, 19(17), 3636. https://doi.org/10.3390/s19173636