Software-Defined Network-Based Vehicular Networks: A Position Paper on Their Modeling and Implementation

 ,
,  and
and
Abstract
:1. Introduction
- We first overview the current studies available in the literature on C-V2X technology in support of V2X applications.
- We then present the different architectures and their underlying system model for LTE-V2X communications.
- We also describe the keys ideas of software-defined networks and their concepts for V2X services.
- We define four elements that are considered for modeling and implementations of SDN for vehicular networks. We then present a comparative analysis for existing schemes grouped according to their modeling and simulation concepts.
- We provide a discussion and highlight vehicular adhoc network(VANET)’ s challenges handled by SDN based vehicular network.
2. Current Studies and Technologies for V2X Services
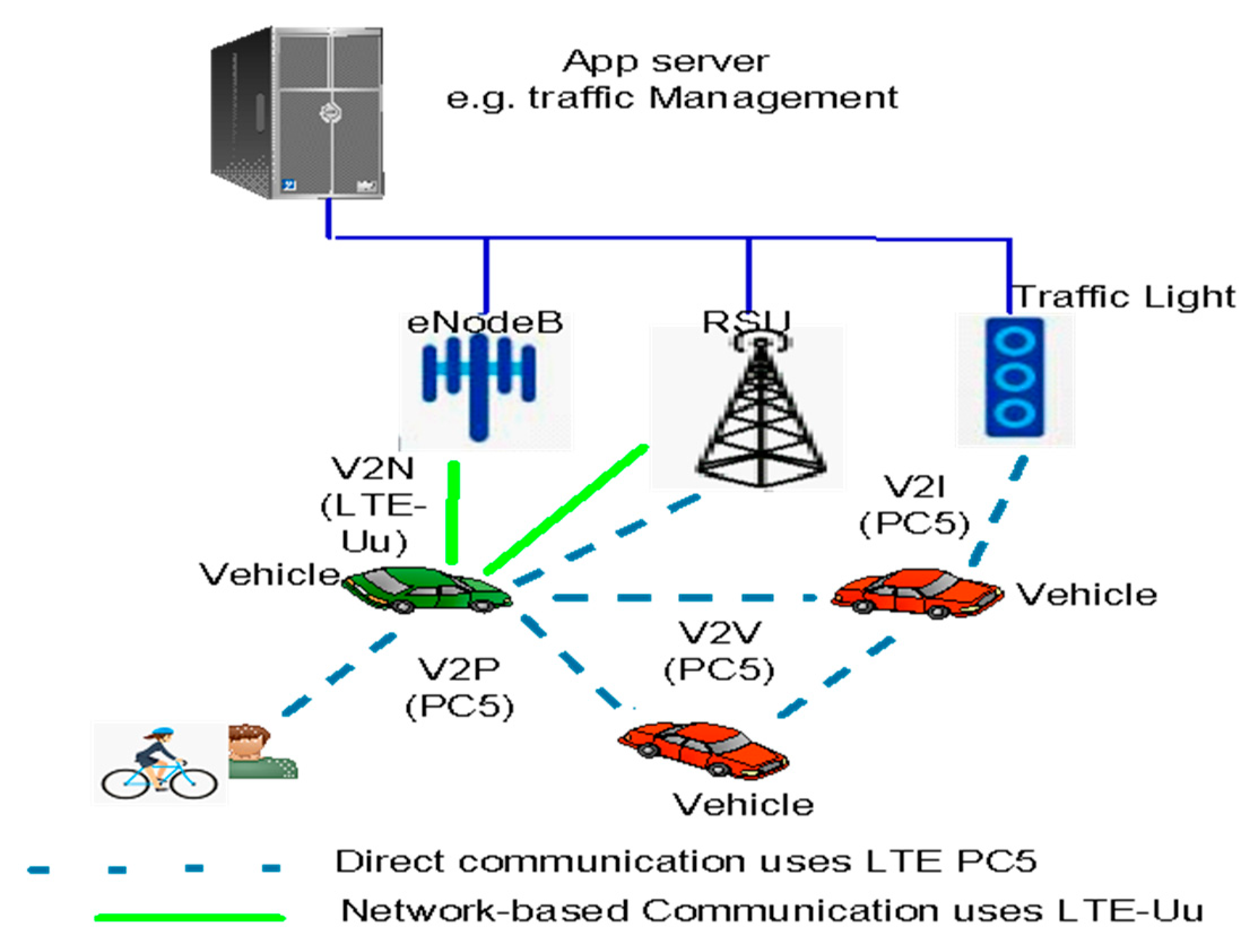
2.1. V2X Communication Modes
- (1)
- Vehicle-to-Vehicle (V2V): A type of communication, in which User Equipements (UEs) (such as vehicles) communicate using V2V services.
- (2)
- Vehicle-to-Pedestrian (V2P): A type of communication, in which both UEs (vehicle, pedestrian) communicate using V2P services.
- (3)
- Vehicle-to-Infrastructure (V2I): A type of communication, in which one part is a vehicle- capable user equipement (VUE) and an RSU entity, both communicating using V2I services.
- (4)
- Vehicle-to-Network (V2N): A type of communication, in which one part is vehicle-capable user equipment (VUE) and the other part is a V2X application server on the cloud for instance, both communicating using V2N services. As shown in Figure 1, V2N relates to any communication between vehicles and computing infrastructures such as RSU deployed either with eNodeB or like a standalone stationary UE [15].
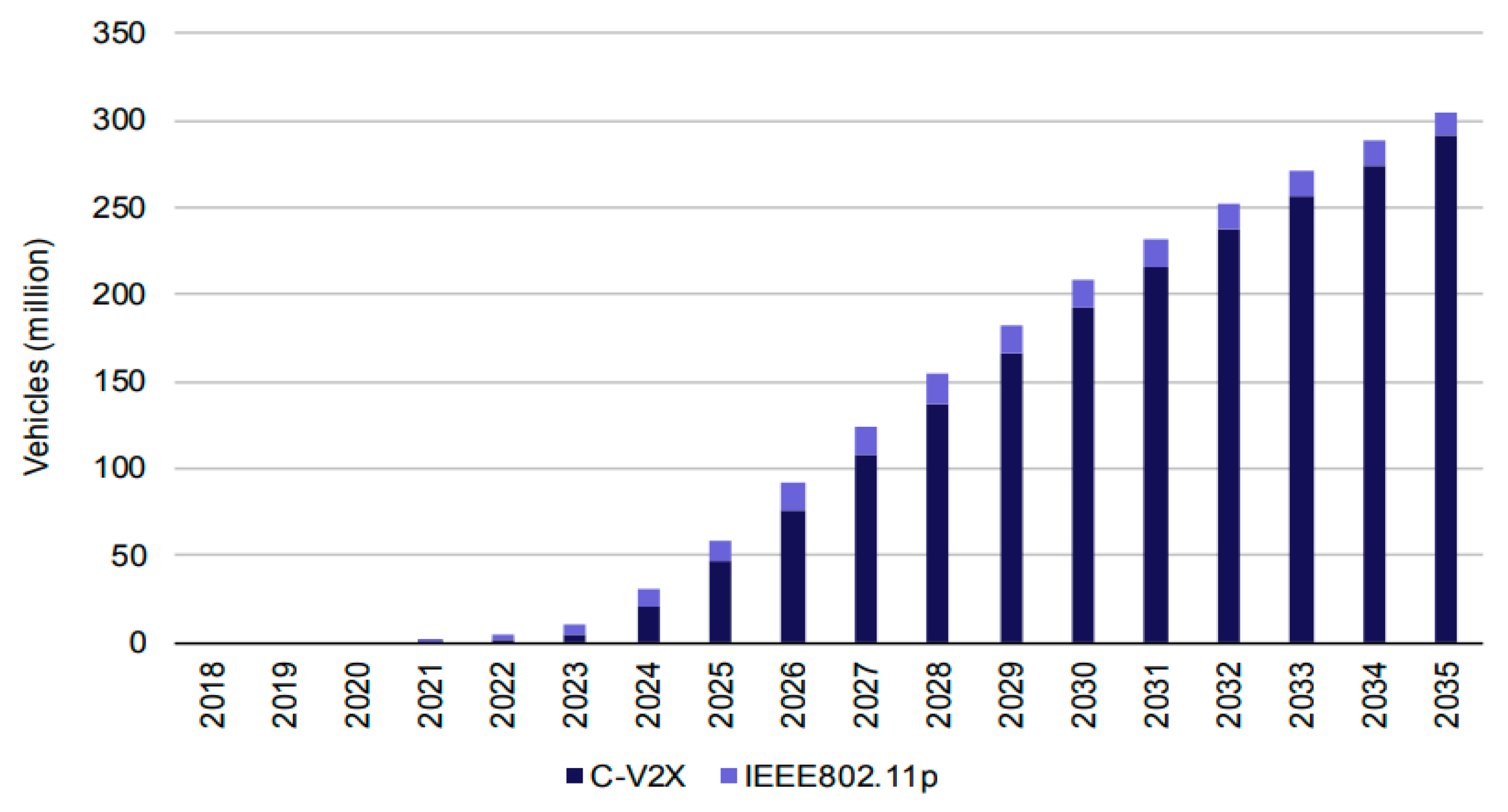
2.2. Evolution of Vehicles Using V2X Services
2.3. 3rd Generation Partnership Project (3GPP) Cellular-V2X
3. A Comparative Study of Architectures and a System Model of LTE-V2X Communication in the Implementation of V2X Services
- 1)
- Relevant use cases and requirements for V2X services
- 2)
- Design choices determining the performance of LTE-V2X communications
3.1. Relevant Use cases and Requirements for V2X Services
3.2. Design Choices Determining the Performance of LTE-V2X Communication
4. Modeling and Implementations of Software-Defined Vehicular Networks for V2X
4.1. Definition of Software-Defined Networks
4.2. Software-Defined Networks and their Concept in Vehicular Networks for Deploying V2X Services
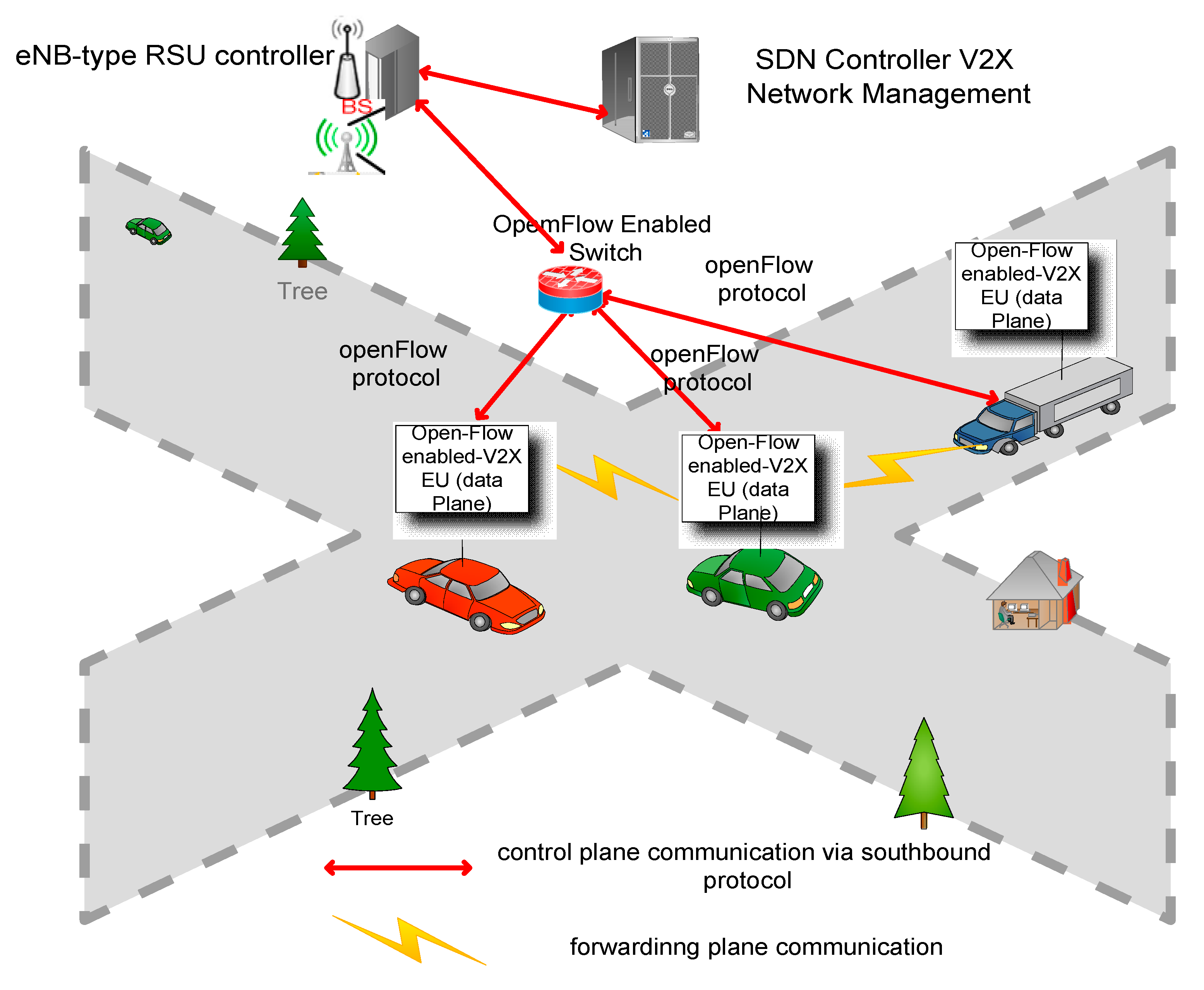
4.3. Architecture Overview of Software-Defined Vehicular Networks
4.4. Modeling and Implementations of SDN for Vehicular Networks
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mohammad, A.S.; Ala, A.F.; Mohsen, G. Software-Defined Networking for RSU clouds in support of the Internet of Vehicles. IEEE Internet Things J. 2015, 2, 133–144. [Google Scholar]
- Ke, Z.; Yuming, M.; Supeng, L.; Yejun, H.; Yan, Z. Mobile-Edge Computing for Vehicular networks. IEEE Vehic. Technol. Mag. 2017, 12, 36–44. [Google Scholar]
- Campolo, C.; Molinaro, A.; Menichella, F. 5G Network Slicing for Vehicle-to-Everything Services. IEEE Wirel. Commun. 2017, 24, 38–45. [Google Scholar] [CrossRef]
- Seo, H.; Lee, K.D.; Yasukawa, S.; Peng, Y.; Sartori, P. LTE Evolution for Vehicle-to-Everything Services. IEEE Commun. Mag. 2016, 6, 22–28. [Google Scholar] [CrossRef]
- Silva, M.C.; Masini, M.B.; Ferrari, G.; Thibault, I. A Survey on Infrastructure-Based Vehicular Networks. Mob. Inf. Syst. 2017, 2017, 1–28. [Google Scholar] [CrossRef] [Green Version]
- 5G Americas V2X Cellular Solutions. Available online: http://www.5gamericas.org/files/2914/7769/1296/5GA_V2X_Report_FINAL_for_upload.pdf (accessed on 31 August 2019).
- 5GAA, White Papers, Toward Fully Connected Vehicles: Edge Computing for Advanced Automotive Communications. Available online: http://5gaa.org/wp-content/uploads/2017/12/5GAA_T-170219-whitepaper-EdgeComputing_5GAA.pdf (accessed on 31 August 2019).
- Jianqi, L.; Jiafu, W.; Bi, Z.; Qinruo, W.; Houbing, S.; Meikang, Q. A Scalable and Quick-Response Software Defined Vehicular Network Assisted by Mobile Edge Computing. IEEE Commun. Mag. 2017, 55, 94–100. [Google Scholar]
- He, X.; Ren, Z.; Shi, C.; Fang, J. A Novel Load Balancing Strategy of Software-Defined Cloud/Fog Networking on the Internet of Vehicles. China Commun. 2016, 13, 140–149. [Google Scholar] [CrossRef]
- Deng, J.D.; Lien, S.Y.; Lin, C.C.; Hung, C.S.; Chen, W.B. Latency Control in Software-Defined Mobile-Edge vehicular Networking. IEEE Commun. Mag. 2017, 55, 87–93. [Google Scholar] [CrossRef]
- Truong, B.N.; Lee, M.G.; Doudane, G.Y. Software Defined Networking-based Vehicular Adhoc Network with Fog Computing. In Proceedings of the 2015 IFIP/IEEE International Symposium on Integrated Network Management (IM), Ottawa, ON, Canada, 11–15 May 2015. [Google Scholar]
- Ku, I.; Lu, Y.; Gerla, M.; Ongaro, F.; Gomes, L.R.; Cerqueira, E. Towards Software-Defined VANET: Architecture and Services. In Proceedings of the 13th Annual Mediterranean AdHoc Networking Workshop (MED-HOC-NET), Piran, Slovenia, 2–4 June 2014; pp. 103–110. [Google Scholar]
- Adnan, M.; Wei, E.Z.; Quan, Z.S. Software-Defined Heterogeneous Vehicular Networking: The Architectural Design and Open Challenges. Future Internet 2019, 11, 1–17. [Google Scholar]
- Ramon, D.R.F.; Claudia, C.; Christian, E.R.; Antonella, M. From Theory to Experimental Evaluation: Resource Management in Software-Defined Vehicular Networks. IEEE 2017, 5, 1–8. [Google Scholar]
- Wang, X.; Mao, S.; Gong, M.X. An overview of 3GPP cellular vehicle-to-everything standards. Get Mobile. 2017, 21, 19–25. [Google Scholar] [CrossRef]
- 3GPP. Study on LTE Support for Vehicle to Everything(V2X) Services. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=2898 (accessed on 31 August 2019).
- Rebbeck, T.; Stewart, J.; Lacour, H.A.; Lillen, A.; McClure, D.; Dunoyer, A. Socio-Economic Benefits of Cellular V2X, Final Report for 5GAA. Available online: http://www.analysysmason.com/contentassets/b1bd66c1baf443be9678b483619f2f3d/analysys-mason-report-for-5gaa-on-socio-economic-benefits-of-cellular-v2x.pdf (accessed on 31 August 2019).
- US Department of transportation. The smart/Connected City and Its Implications for Connected Transportation. Available online: www.its.dot.gov/index.htm (accessed on 31 August 2019).
- 3GPP. LTE-Based V2X Services. Available online: http://www.tech-invite.com/3m36/tinv-3gpp-36-885.html (accessed on 31 August 2019).
- 3GPP. Liaison Statement from 3GPP RAN on LTE-Based Vehicle-to-Vehicle Communication. Available online: http://www.3gpp.org/news-events/3gpp-news/1798-v2x_r14 (accessed on 31 August 2019).
- 3GPP. Evolved Universal Terrestrial Radio. Available online: https://www.etsi.org/deliver/etsi_ts/136300_136399/136300/09.04.00_60/ts_136300v090400p.pdf (accessed on 31 August 2019).
- 3GPP. Study on the Enhancement of 3GPP Support 5G V2X Services. TR 22.886. 2016. Available online: https://www.3gpp.org/DynaReport/22-series.htm (accessed on 31 August 2019).
- Wang, X.; Mao, S.; Gong, M.X. An Overview of 3GPP Cellular Vehicle-to-Everything Standards. Available online: https://www.sigmobile.org/pubs/getmobile/articles/Vol21Issue3_2.pdf (accessed on 31 August 2019).
- 3GPP. Service Requirements for V2X Services. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=2989 (accessed on 31 August 2019).
- Masegosa, M.R.; Gozalvez, J. A New 5G Technology for Short-Range Vehicle-to-Everything Communications. IEEE Vehicular Tech. 2017, 10, 30–39. [Google Scholar] [CrossRef]
- Chen, A.; Hu, J.; Shi, Y.; Zhao, L. LTE-V: A TD-LTE-Based V2X Solution for Future Vehicular Network. IEEE Internet of Things J. 2016, 3, 907–1005. [Google Scholar] [CrossRef]
- Mukherjee, A.; Cheng, J.; Falahati, S.; Koorapaty, H.; Kang, D.H.; Karaki, R.; Falconetti, L.; Larsson, D. Licensed-Assisted Access LTE: Coexistence with IEEE 802.11 and the Evolution toward 5G. IEEE Commun. Mag 2016, 54, 50–57. [Google Scholar] [CrossRef]
- Boban, M.; Kousaridas, A.; Manolakis, K.; Eichinger, J.; Xu, W. Use Cases, Requirements, and Design Considerations for 5G V2X. Available online: https://arxiv.org/pdf/1712.01754.pdf (accessed on 31 August 2019).
- Kawasaki, R.; Onishi, H.; Murase, T. Performance Evaluation on V2X Communication with PC5-based and uu-based LTE in Crash Warning Application. In Proceedings of the 2017 IEEE 6th Global Conferenceon Consumer Electronics (GCCE2017), Nagoya, Japan, 24–27 October 2017. [Google Scholar]
- Kreutz, D.; Ramos, M.V.F.; Veissimo, E.P.; Rothenberg, E.C.; Azodolmplky, S.; Uhlig, S. Software-Defined Networking: A Comprehensive Survey. Proc. IEEE 2015, 103, 14–76. [Google Scholar] [CrossRef]
- Fei, H. Network Innovation through OpenFlow and SDN: Principles and Design; CRC Publishing: Boca Raton, FL, USA, 2016. [Google Scholar]
- Li, H.; Dong, M.; Ota, K. Control Plane Optimization in Software-Defined Vehicular Ad Hoc Networks. IEEE T.Veh.Technol. 2016, 65, 7895–7904. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Ding, Y.A.; Tarkoma, S. Software-Defined Networking in Mobile Access Networks; Department of Computer Science, University of Helsinki: Helsinki, Finland, 2013 19 September; pp. 1–29. [Google Scholar]
- Software-Defined Network. What Is It, How Does It Work, and What Is Good for. Available online: http://www.cs.tau.ac.il/~msagiv/courses/rsdn/SDN-TAU.pdf (accessed on 31 August 2019).
- Chayapathi, R.; Hassan, F.S.; Shah, P. Software defined Networking (SDN). In Network Functions Virtualization (NFV) with A Touch of SD; Addison-Wesley Professional: Boston, MA, USA, 2016; ISBN 0-13-446305-6. [Google Scholar]
- Toufga, S.; Owezarski, P.; Abdellatif, S.; Villemur, T. A SDN hybrid architecture for vehicular networks: Applications to Intelligent Transport System. In Proceedings of the 9th Europen Congress on Embedded Real Time Software and Systems (ERTS), Toulouse, France, 31 Januray–2 February 2018; pp. 1–8. [Google Scholar]
- James, E.C. An Introduction to the Use of Modelig and Simulation throughout the Systems Engineering Process. Available online: https://ndiastorage.blob.core.usgovcloudapi.net/ndia/2012/systemtutorial/14907.pdf (accessed on 31 August 2019).
- Zongjian, H.; Jiannong, C.; Xuefeng, L. Enabling rapid innovation for heterogeneous vehicular communications. IEEE 2016, 30, 10–15. [Google Scholar]
- Sergio, C.; Azzedine, B.; Rodolfo, I.M. An Architecture for Hierarchical Software-Defined vehicular Networks. IEEE Commun. Mag. 2017, 55, 80–86. [Google Scholar]
- Piyush, D.; Mohsin, R.; Hoa, L.; Nauman, A. Software-Defined Approach for Communication in Autonomous Transportation Systems. Energy Web 2017, 4, 1–9. [Google Scholar]
- Manisha, C.; Sandeep, H.; Krishn, K.M.; Arun, K.S.; Zhigao, Z. A survey on Software-defined networking in vehicular ad hoc networks: Challenges, applications and use cases. Sustain. Cities Soc. 2017, 35, 830–840. [Google Scholar]
- Yeomin, Z.; Haijun, Z.; Keping, L.; Qiang, Z.; Xiaoming, X. Software-Defined and Fog-Computing-Based Next Generation Vehicular Networks. IEEE commun. Mag. 2018, 56, 34–41. [Google Scholar]
- Wafa, B.J.; Mauro, C.; Chhagan, L. Software-Defined VANETs: Benefits, Challenges, and Future Directions. Available online: https://arxiv.org/abs/1904.04577 (accessed on 31 August 2019).




{kind=link}
{kind=link}
{kind=link}
| Scenario# | Description | Vehicular Communication | Remarks |
|---|---|---|---|
| Base case | Adoption of C-V2X and IEEE 802.11p in the absence of any government measures | V2V using IEEE802.11p or LTE-V2X PC5 | V2V is possible via cellular LTE and V2I and V2P via LTE-Uu of a smartphone |
| Scenario 2 | In 2020, all new vehicles to support ITS services via IEEE 2020 | IEEE 802.11p for V2V and V2I | Road operators should install new RSUs or expand them to support V2I |
| Scenario 3 | In 2023, all new vehicles equipped with LTE PC5 | V2V and V2I via LTE PC5 | Road operators add PC5-based RSU to existing RSUs |
| Scenario 4 | Equitable 5.9GHz use | Division spectrum for V2V based PC5 and IEEE 802.11p | IEEE 802.11 p for V2V/V2I, Cellular(LTE-Uu) for V2N and others use PC5 for V2V/V2I |
| Description of the Problem | System | System Analysis | Model of the Proposed Architecture |
|---|---|---|---|
| Connectivity loss between vehicles and SDN controller [39] | SDVN | Local SDN controller domains through clustering | Hierarchical placement of SDN controllers decrease connectivity latency between them |
| Routing in mobile cloud [12] | SDN-based routing | Track message overhead between vehicles and controller | Control the overhead of the SDN controller and packet delivery ratio |
| Amount of data transfered for multimedia applications [1] | SDVN | Analyze throughput, end-to-end delay | RSU micro-datacenter, stochastic switching for reconfiguration overhead |
| Heterogeneity of wireless infrastructures and inalterable in protocol [38] | SDVANETs | Abstract heterogeneous wireless nodes as SDN switches enabled OpenFlow Allocate network resources through SDN controler | Deploy adaptive protocol for heterogeneous multihop routing; mitigate SDN management overhead via status of SDN switches; SDN enabled V2V, V2I and V2N. |
| Efficient resource utilization [11] | Software-defined Cloud/Fog network | SDN supports hybrid mode, Control plane is distributed between SDN controller, BS and RSU | Fog computing concept is adding to provide FSDN |
| Latency control [10] | Software-defined Mobile Edge computing | Software-defined cloud/edge vehicular networking | Latency control mechanisms: radio access steering at the base stations (BSs) |
| Latency control [40] on Multiple core network for autonomous driving vehicle | Software-defined VANET with 5G | Local knowledge of surroundings nodes, SDN controller, Broadcast beacon message | Cellular network integrated with network Model, SDN control eNB infrastructure, RSU controller controls RSU |
| Latency control and cost on cellular network [32] | Software-defined VANET with 5G | Control communication: VANET based, cellular network-based, hybrid-based | Optimize southbound communication via rebating mechanism, game equilibrium, two-stage leader-follower game for best decision between vehicle and controller |
| Dynamic resource management [14] | Software-Defined VANETs | Topology of SDN controller, Model of Node in Mininet-WiFi | Extend modeling of node car in mininet-WiFi |
| Control latency communication [13] | Vehicular networking; heterogeneity of radio access technologies | Vehicle network architecture for resource management, SDN controller, redesign of existing vehicular networks | Model SDHVNet architecture |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nkenyereye, L.; Nkenyereye, L.; Islam, S.M.R.; Choi, Y.-H.; Bilal, M.; Jang, J.-W. Software-Defined Network-Based Vehicular Networks: A Position Paper on Their Modeling and Implementation. Sensors 2019, 19, 3788. https://doi.org/10.3390/s19173788
Nkenyereye L, Nkenyereye L, Islam SMR, Choi Y-H, Bilal M, Jang J-W. Software-Defined Network-Based Vehicular Networks: A Position Paper on Their Modeling and Implementation. Sensors. 2019; 19(17):3788. https://doi.org/10.3390/s19173788
Chicago/Turabian StyleNkenyereye, Lionel, Lewis Nkenyereye, S. M. Riazul Islam, Yoon-Ho Choi, Muhammad Bilal, and Jong-Wook Jang. 2019. "Software-Defined Network-Based Vehicular Networks: A Position Paper on Their Modeling and Implementation" Sensors 19, no. 17: 3788. https://doi.org/10.3390/s19173788
APA StyleNkenyereye, L., Nkenyereye, L., Islam, S. M. R., Choi, Y. -H., Bilal, M., & Jang, J. -W. (2019). Software-Defined Network-Based Vehicular Networks: A Position Paper on Their Modeling and Implementation. Sensors, 19(17), 3788. https://doi.org/10.3390/s19173788