Multi-sensor Fusion Road Friction Coefficient Estimation During Steering with Lyapunov Method

Abstract
:1. Introduction
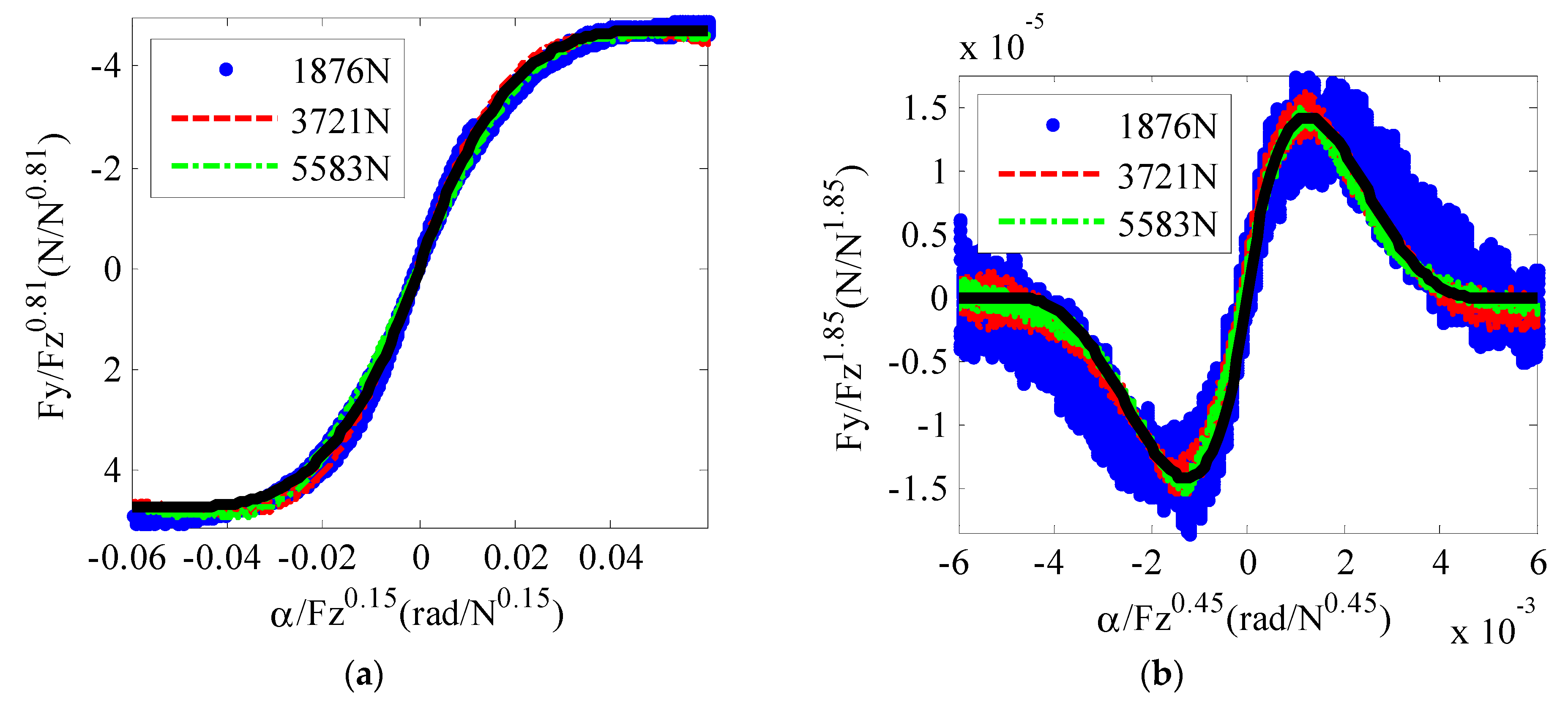
- A novel modified tire brush model based on tire test data is proposed. Compared with the traditional tire brush model, new mapping relationships between lateral tire force and the sideslip angle and between self-aligning torque and the sideslip angle are established, which can model tire forces and self-aligning torque more precisely. Further, the simple expression form of the modified tire model functions facilitates the proof of the non-linear observer’s stability.
- Lateral displacement information is introduced into the estimation system. Lateral displacement information can be obtained from new sensors equipped on intelligent vehicles, and it can be useful for accurate sideslip angle estimation, so that the road friction coefficient can be calculated more precisely.
- A non-linear observer for the road friction coefficient is proposed. The stability of the nonlinear observer is proved thorough the Lyapunov method, and the robustness is analyzed.
2. Vehicle and Tire Model
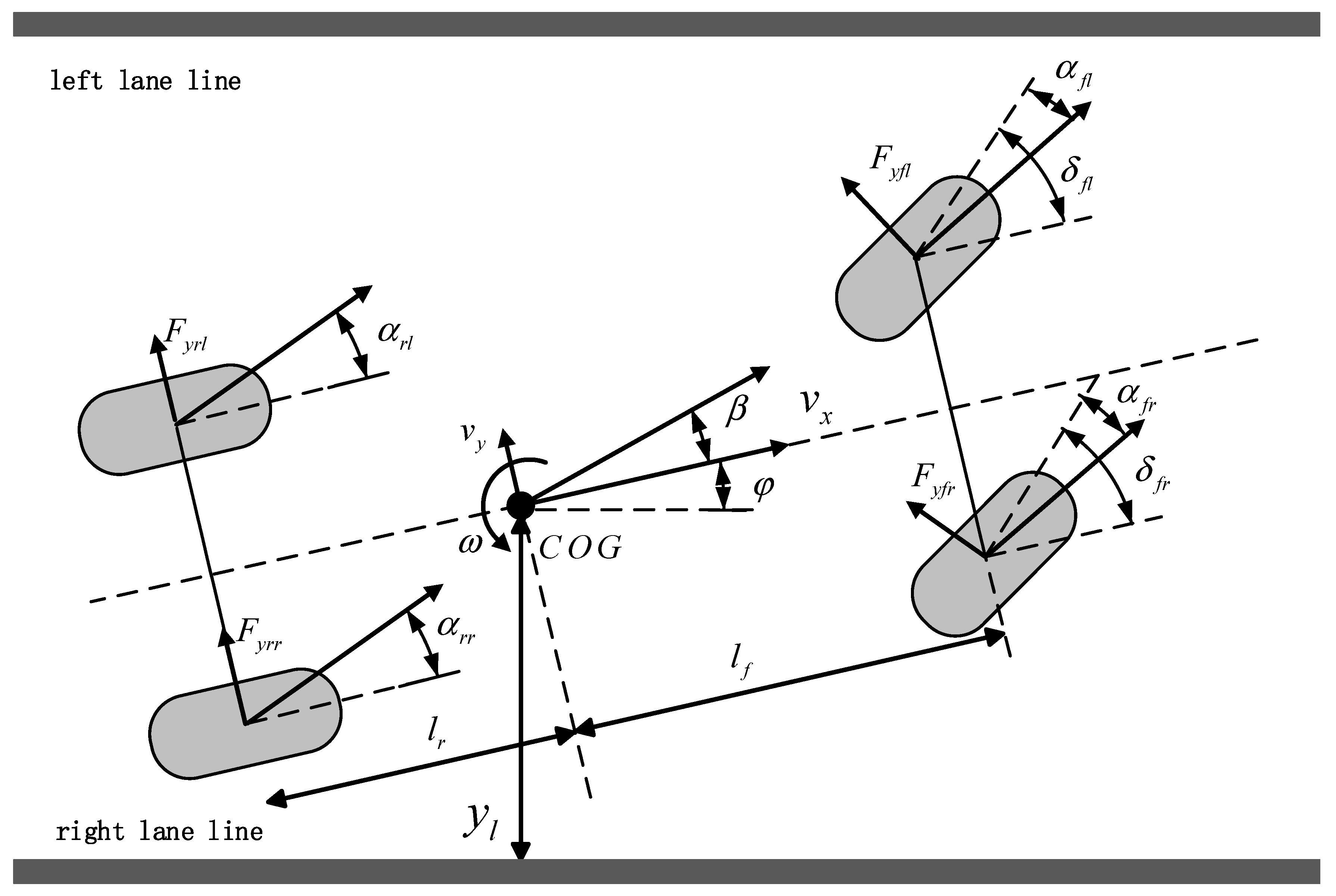
2.1. Vehicle Model
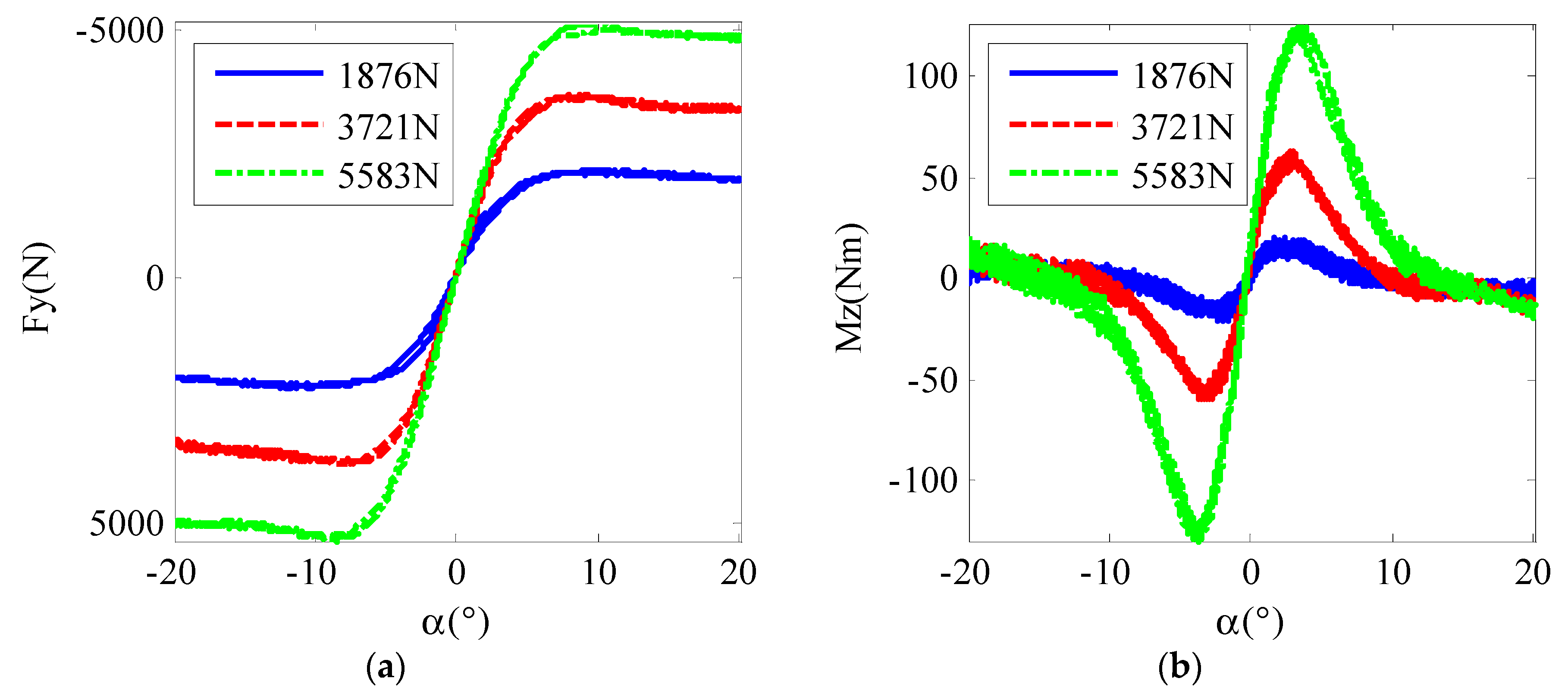
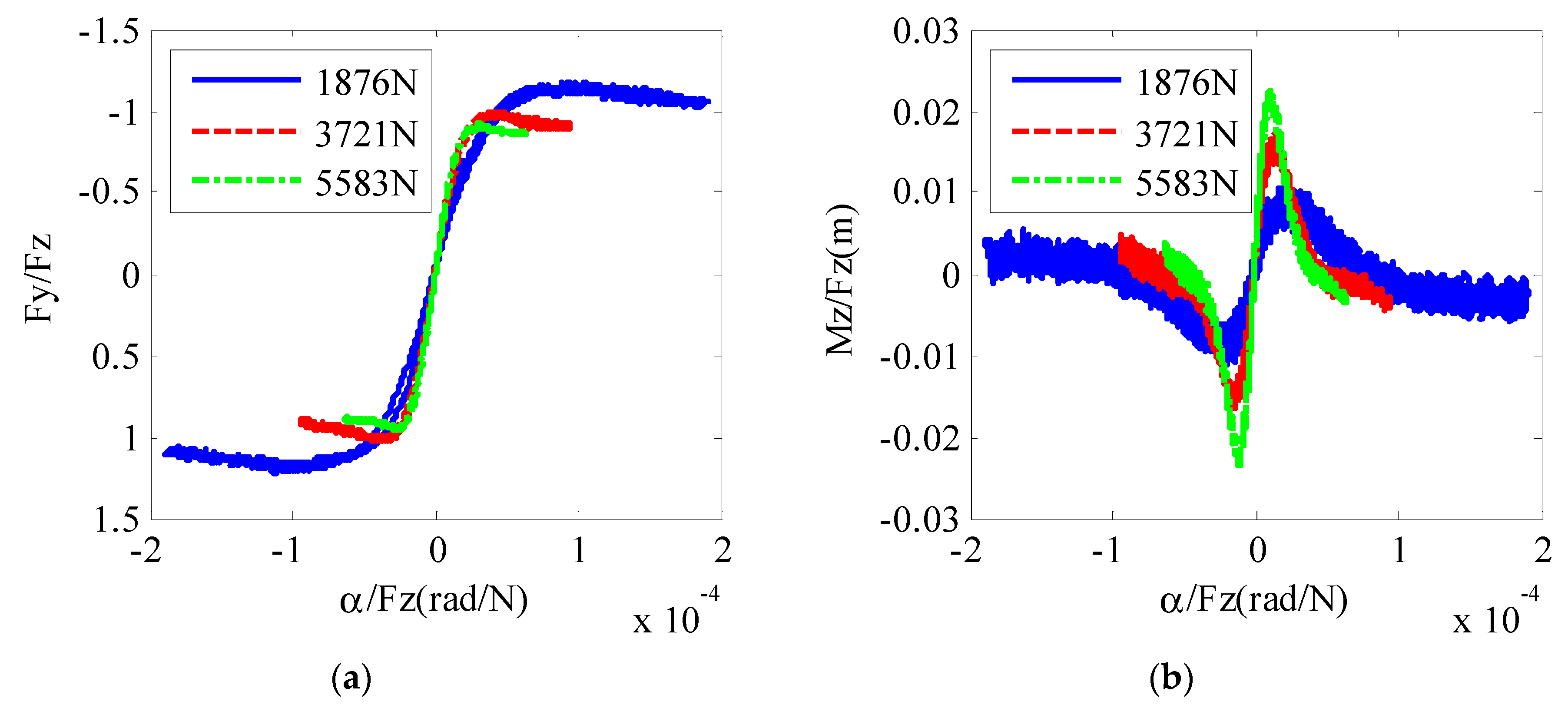
2.2. Tire Model
3. Nonlinear Observer Design for Road Friction Coefficient Estimation
3.1. NonlinearObserver Design
3.2. Stability Analysis
3.3. Robustness Analysis
4. Experimental Validation
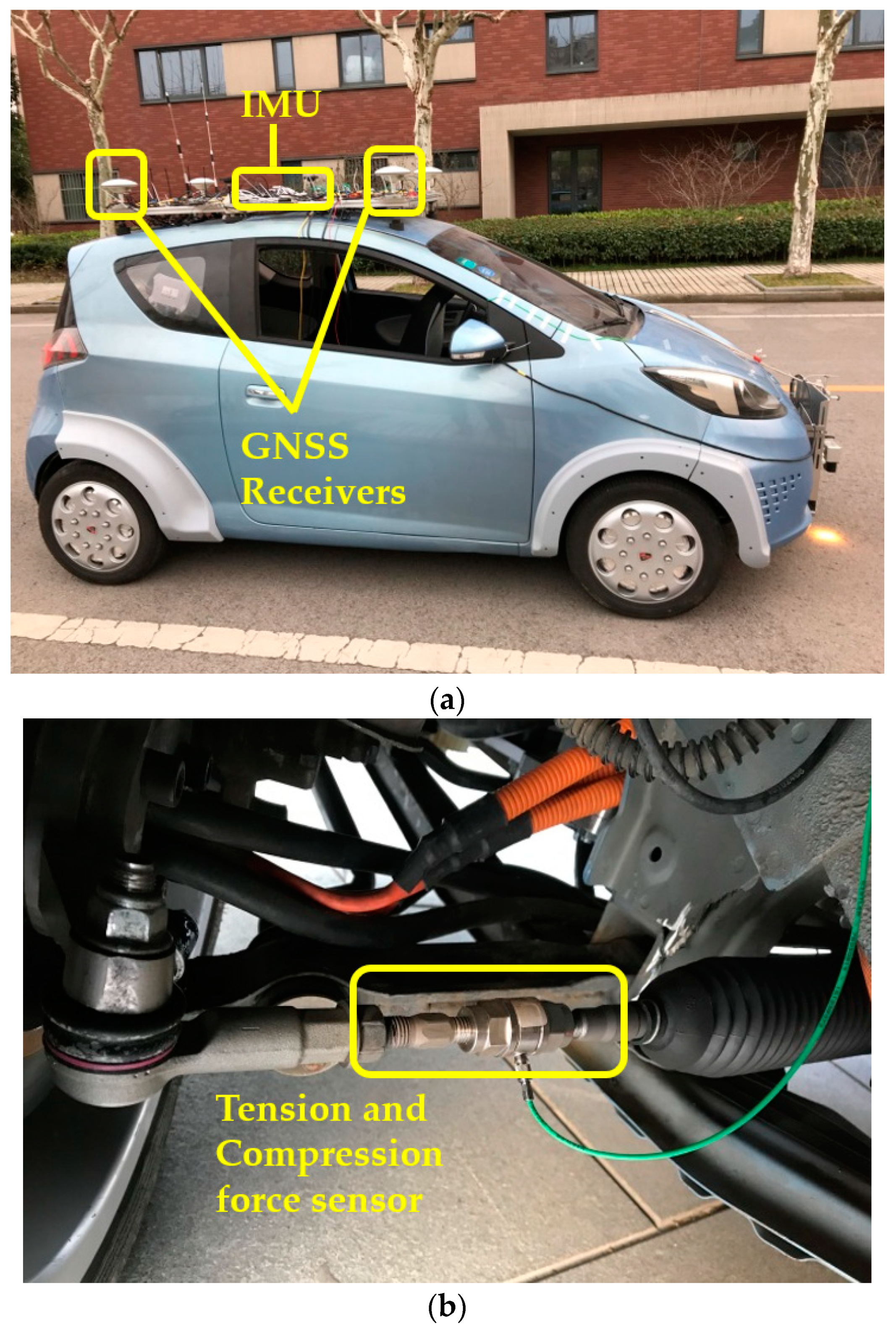
4.1. Experimental Setup
4.1.1. Test Vehicle
4.1.2. Test Road
4.2. Experimental Results and Analysis
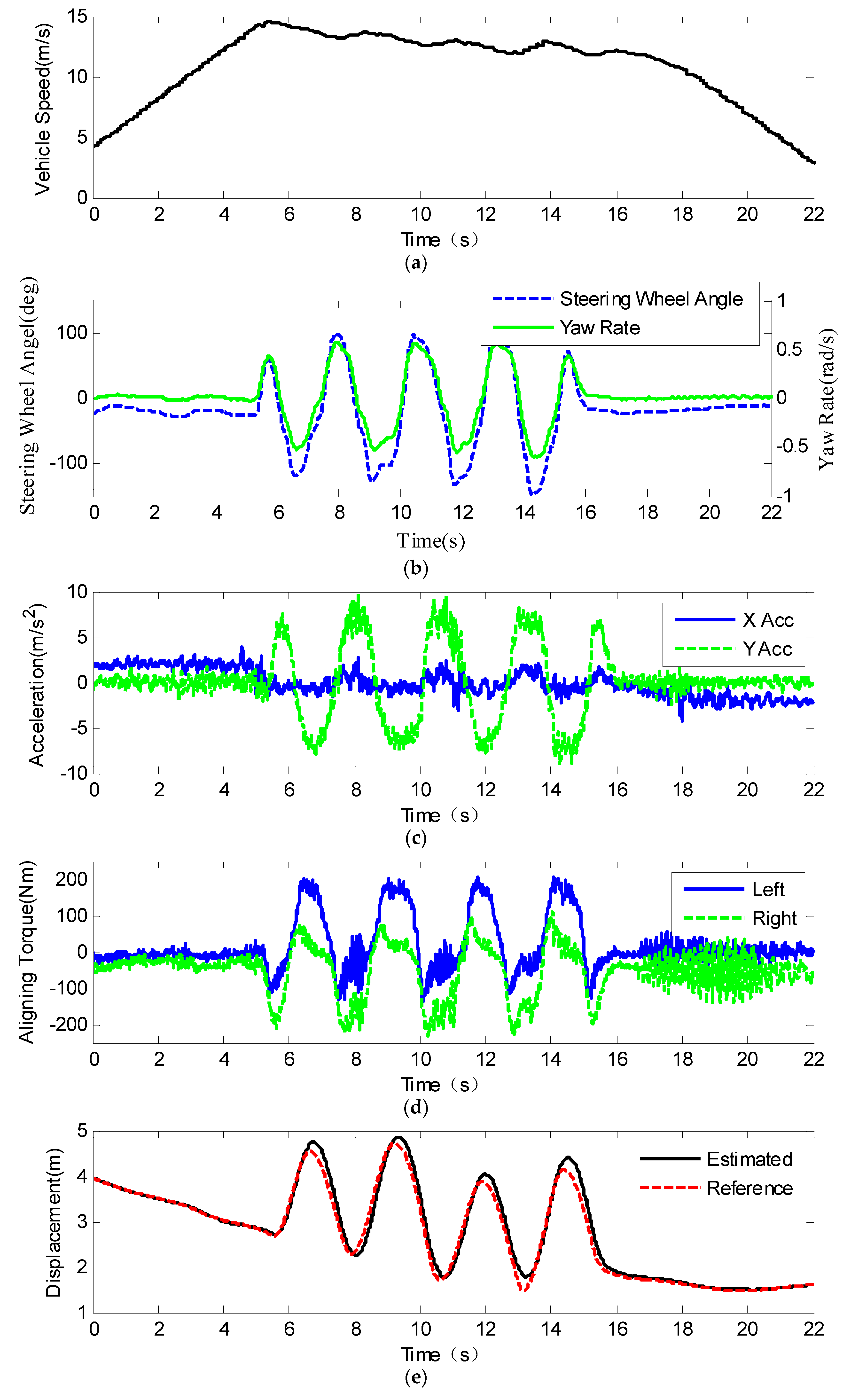
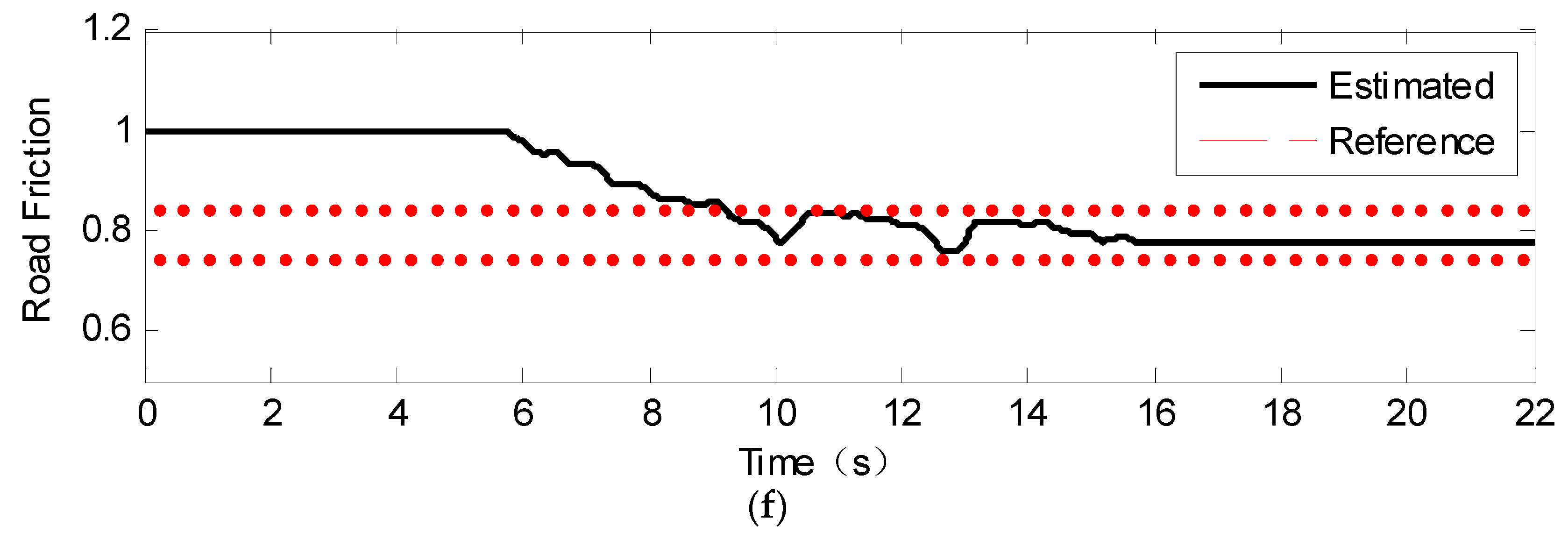
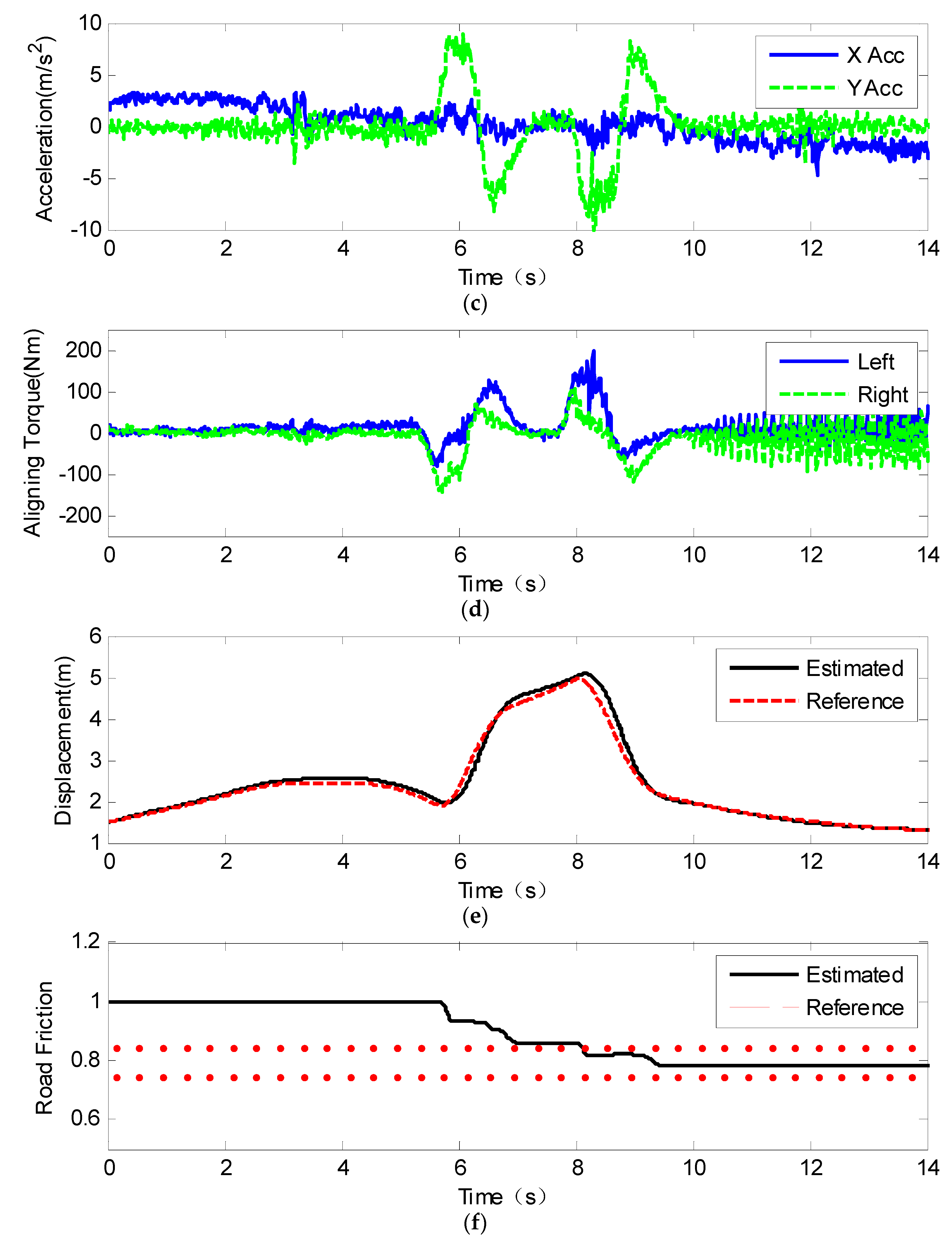
4.2.1. Slalom Test
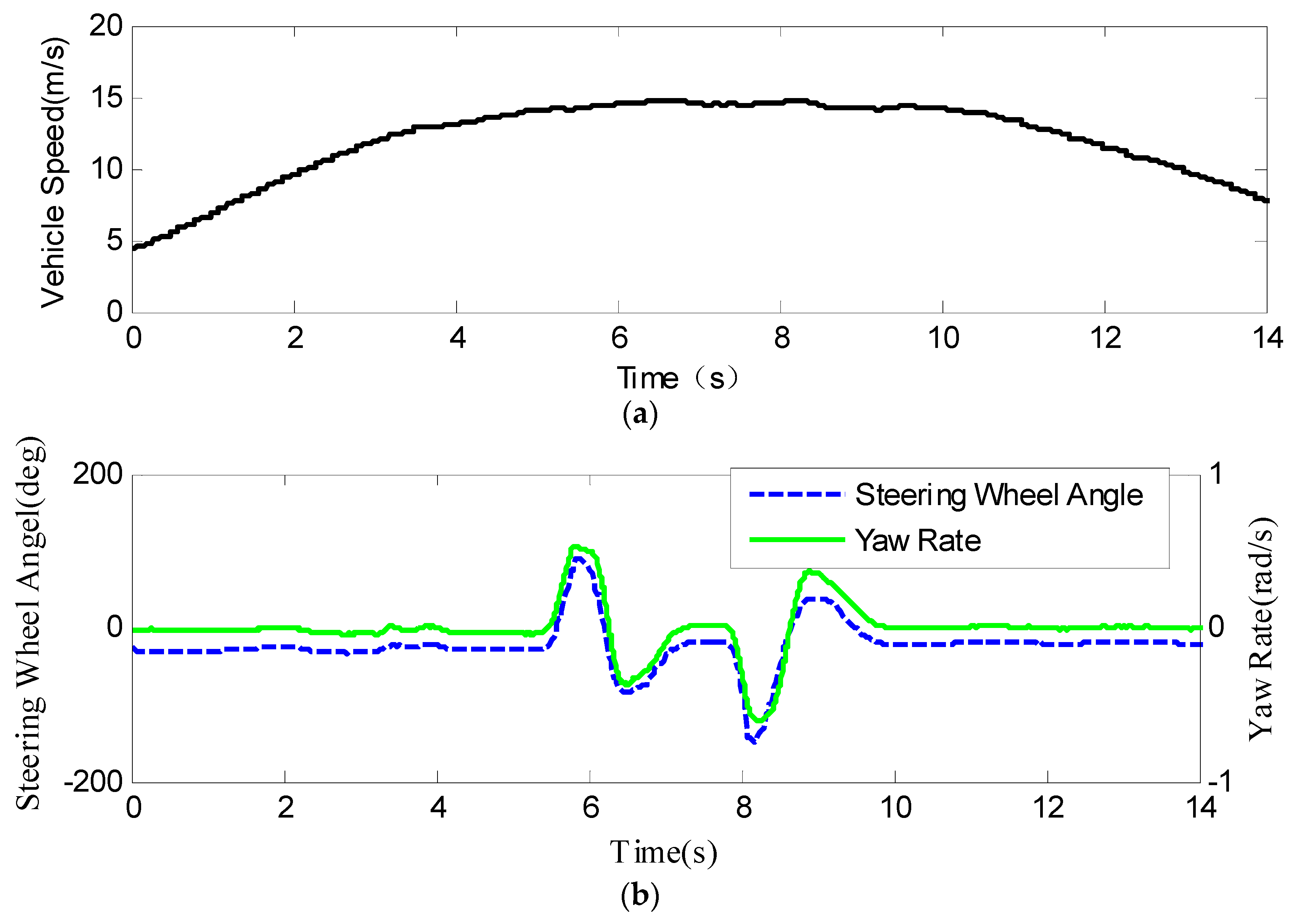
4.2.2. DLC Test
5. Conclusions
6. Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Cheng, S.; Li, L.; Chen, J. Fusion Algorithm Design Based on Adaptive SCKF and Integral Correction for Side-Slip Angle Observation. IEEE Trans. Ind. Electron. 2018, 65, 5754–5763. [Google Scholar] [CrossRef]
- Chen, J.; Song, J.; Li, L.; Jia, G.; Ran, X.; Yang, C. UKF-based adaptive variable structure observer for vehicle sideslip with dynamic correction. IET Control Theory and Appl. 2016, 10, 1641–1652. [Google Scholar] [CrossRef]
- Lv, C.; Xing, Y.; Zhang, J.; Na, X.; Li, Y.; Liu, T.; Cao, D.; Wang, F.Y. Levenberg-Marquadt Backpropagation Training of Multilayer Neural Networks for State Estimation of a Safety-Critical Cyber-Physical System. IEEE Trans. Ind. Inf. 2018, 14, 3436–3446. [Google Scholar] [CrossRef]
- Li, L.; Jia, G.; Chen, J.; Zhu, H.; Cao, D.; Song, J. A novel vehicle dynamics stability control algorithm based on the hierarchical strategy with constrain of nonlinear tyre forces. Veh. Syst. Dyn. 2015, 53, 1093–1116. [Google Scholar] [CrossRef]
- Lv, C.; Zhang, J.; Li, Y.; Yuan, Y. Directional-stability-aware brake blending control synthesis for over-actuated electric vehicles during straight-line deceleration. Mechatronics 2016, 38, 121–131. [Google Scholar] [CrossRef]
- Lv, C.; Zhang, J.; Li, Y.; Yuan, Y. Novel control algorithm of braking energy regeneration system for an electric vehicle during safety-critical driving maneuvers. Energy Convers. Manage. 2015, 106, 520–529. [Google Scholar] [CrossRef]
- Li, L.; Song, J.; Li, H.Z.; Shan, D.S.; Kong, I.; Yang, C.C. Comprehensive prediction method of road friction for vehicle dynamics control. J. Automobile Eng. 2009, 223, 987–1002. [Google Scholar] [CrossRef]
- Li, L.; Yang, K.; Jia, G.; Ran, X.; Song, J.; Han, Z.Q. Comprehensive tire-road friction coefficient estimation based on signal fusion method under complex maneuvering operations. Mech. Syst. Sig. Processing 2015, 56–57, 259–276. [Google Scholar] [CrossRef]
- Cabrera, J.A.; Castillo, J.J.; Perez, J.; Velasco, J.M.; Guerra, A.J.; Hernandez, P. A Procedure for Determining Tire-Road Friction Characteristics Using a Modification of the Magic Formula Based on Experimental Results. Sensors 2018, 18, 896. [Google Scholar] [CrossRef]
- Khaleghian, S.; Emami, A.; Taheri, S. A technical survey on tire-road friction estimation. Friction 2017, 5, 123–146. [Google Scholar] [CrossRef] [Green Version]
- Alonso, J.; Lopez, J.M.; Pavon, I.; Recuero, M.; Asensio, C.; Arcas, G.; Bravo, A. On-board wet road surface identification using tyre/road noise and Support Vector Machines. Appl. Acoust. 2014, 76, 407–415. [Google Scholar] [CrossRef]
- Roychowdhury, S.; Zhao, M.; Wallin, A.; Ohlsson, N.; Jonasson, M. Machine Learning Models for Road Surface and Friction Estimation using Front-Camera Images. In Proceedings of the 2018 International Joint Conference on Neural Networks, Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–8. [Google Scholar]
- Yunta, J.; Garcia-Pozuelo, D.; Diaz, V.; Olatunbosun, O. A Strain-Based Method to Detect Tires’ Loss of Grip and Estimate Lateral Friction Coefficient from Experimental Data by Fuzzy Logic for Intelligent Tire Development. Sensors 2018, 18, 490. [Google Scholar] [CrossRef] [PubMed]
- Ambroz, M.; Hudomalj, U.; Marinsek, A.; Kamnik, R. Raspberry Pi-Based Low-Cost Connected Device for Assessing Road Surface Friction. Electronics 2019, 8, 341. [Google Scholar] [CrossRef]
- Ahn, C.; Peng, H.; Tseng, H.E. Robust estimation of road friction coefficient using lateral and longitudinal vehicle dynamics. Veh. Syst. Dyn. 2012, 50, 961–985. [Google Scholar] [CrossRef]
- Castillo Aguilar, J.J.; Cabrera Carrillo, J.A.; Guerra Fernandez, A.J.; Carabias Acosta, E. Robust Road Condition Detection System Using In-Vehicle Standard Sensors. Sensors 2015, 15, 32056–32078. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Castillo, J.J.; Cabrera, J.A.; Guerra, A.J.; Simon, A. A Novel Electrohydraulic Brake System With Tire-Road Friction Estimation and Continuous Brake Pressure Control. IEEE Trans. Ind. Electron. 2016, 63, 1863–1875. [Google Scholar] [CrossRef]
- Enisz, K.; Szalay, I.; Kohlrusz, G.; Fodor, D. Tyre-road friction coefficient estimation based on the discrete-time extended Kalman filter. J. Automobile Eng. 2015, 229, 1158–1168. [Google Scholar] [CrossRef]
- Xia, X.; Xiong, L.; Sun, K.; Yu, Z.P. Estimation of maximum road friction coefficient based on Lyapunov method. Int. J. Automot. Technol. 2016, 17, 991–1002. [Google Scholar] [CrossRef]
- Wang, R.; Wang, J. Tire-road friction coefficient and tire cornering stiffness estimation based on longitudinal tire force difference generation. Control Eng. Pract. 2013, 21, 65–75. [Google Scholar] [CrossRef]
- Qi, Z.; Taheri, S.; Wang, B.; Yu, H. Estimation of the tyre-road maximum friction coefficient and slip slope based on a novel tyre model. Veh. Syst. Dyn. 2015, 53, 506–525. [Google Scholar] [CrossRef]
- Luque, P.; Mantaras, D.A.; Fidalgo, E.; Alvarez, J.; Riva, P.; Giron, P.; Compadre, D.; Ferran, J. Tyre-road grip coefficient assessment—Part II: Online estimation using instrumented vehicle, extended Kalman filter, and neural network. Veh. Syst. Dyn. 2013, 51, 1872–1893. [Google Scholar] [CrossRef]
- Matsuda, T.; Jo, S.I.; Nishira, H.; Deguchi, Y. Instantaneous Estimation of Road Friction based on Front Tire SAT using Kalman Filter. SAE Int. J. Passenger Cars Mech. Syst. 2013, 6, 147–153. [Google Scholar] [CrossRef]
- Hsu, J.; Laws, S.M.; Gerdes, J.C. Estimation of Tire Slip Angle and Friction Limits Using Steering Torque. IEEE Trans. Control Syst. Technol. 2010, 18, 896–907. [Google Scholar] [CrossRef]
- Ahn, C.; Peng, H.; Tseng, H.E. Robust Estimation of Road Frictional Coefficient. IEEE Trans. Control Syst. Technol. 2013, 21, 1–13. [Google Scholar] [CrossRef]
- Shao, L.; Jin, C.; Lex, C.; Eichberger, A. Robust road friction estimation during vehicle steering. Veh. Syst. Dyn. 2019, 57, 493–519. [Google Scholar] [CrossRef]
- Yoon, J.H.; Peng, H. A Cost-Effective Sideslip Estimation Method Using Velocity Measurements From Two GPS Receivers. IEEE Trans. Veh. Technol. 2014, 63, 2589–2599. [Google Scholar] [CrossRef]
- Yoon, J.H.; Peng, H. Robust Vehicle Sideslip Angle Estimation Through a Disturbance Rejection Filter That Integrates a Magnetometer With GPS. IEEE Trans. Intell. Trans. Syst. 2014, 15, 191–204. [Google Scholar] [CrossRef]
- Wang, Y.; Binh Minh, N.; Fujimoto, H.; Hori, Y. Multirate Estimation and Control of Body Slip Angle for Electric Vehicles Based on Onboard Vision System. IEEE Trans. Ind. Electron. 2014, 61, 1133–1143. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Y.; Fujimoto, H.; Hori, Y. Vision-Based Lateral State Estimation for Integrated Control of Automated Vehicles Considering Multirate and Unevenly Delayed Measurements. ASME Trans. Mechatron. 2018, 23, 2619–2627. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| m/(kg) | 1343.8 |
| b/(m) | 1.356 |
| lf/(m) | 1.112 |
| lr/(m) | 1.193 |
| Iz/(kg·m2) | 1785 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, L.; Xiong, L.; Lin, X.; Xia, X.; Liu, W.; Lu, Y.; Yu, Z. Multi-sensor Fusion Road Friction Coefficient Estimation During Steering with Lyapunov Method. Sensors 2019, 19, 3816. https://doi.org/10.3390/s19183816
Gao L, Xiong L, Lin X, Xia X, Liu W, Lu Y, Yu Z. Multi-sensor Fusion Road Friction Coefficient Estimation During Steering with Lyapunov Method. Sensors. 2019; 19(18):3816. https://doi.org/10.3390/s19183816
Chicago/Turabian StyleGao, Letian, Lu Xiong, Xuefeng Lin, Xin Xia, Wei Liu, Yishi Lu, and Zhuoping Yu. 2019. "Multi-sensor Fusion Road Friction Coefficient Estimation During Steering with Lyapunov Method" Sensors 19, no. 18: 3816. https://doi.org/10.3390/s19183816
APA StyleGao, L., Xiong, L., Lin, X., Xia, X., Liu, W., Lu, Y., & Yu, Z. (2019). Multi-sensor Fusion Road Friction Coefficient Estimation During Steering with Lyapunov Method. Sensors, 19(18), 3816. https://doi.org/10.3390/s19183816