A Calibration-Free Method Based on Grey Relational Analysis for Heterogeneous Smartphones in Fingerprint-Based Indoor Positioning




Abstract
:
1. Introduction
2. Impact of Heterogeneous Smartphones on Fingerprint Positioning
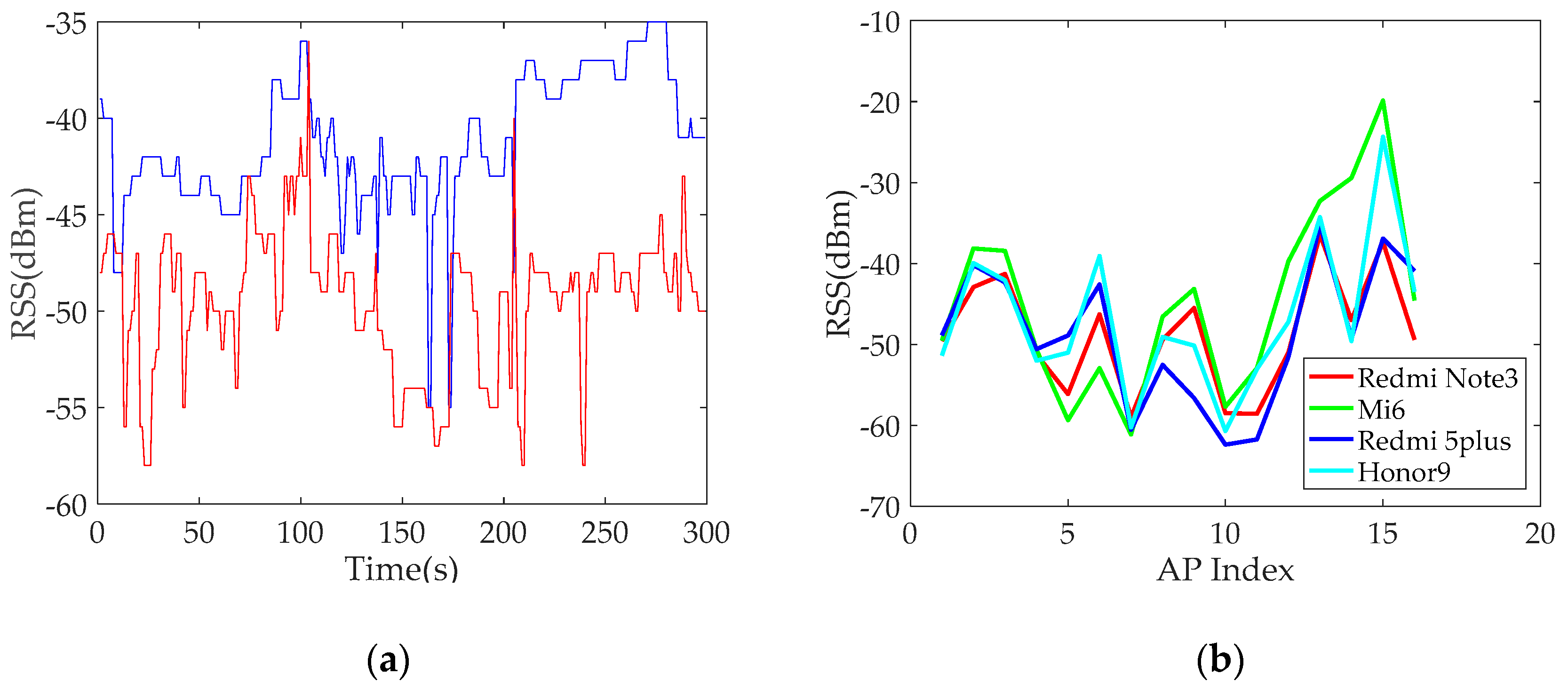
2.1. Difference Analysis of RSS Collected by Heterogeneous Smartphones
2.2. Influence of Added Test Constant on the Positioning Performance for the Same Smartphone
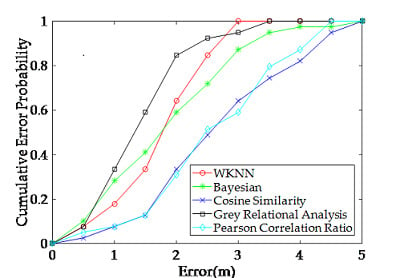
2.3. Influence of Heterogeneous Smartphones in Conventional Positioning Methods
3. GRA-Based Fingerprint Method
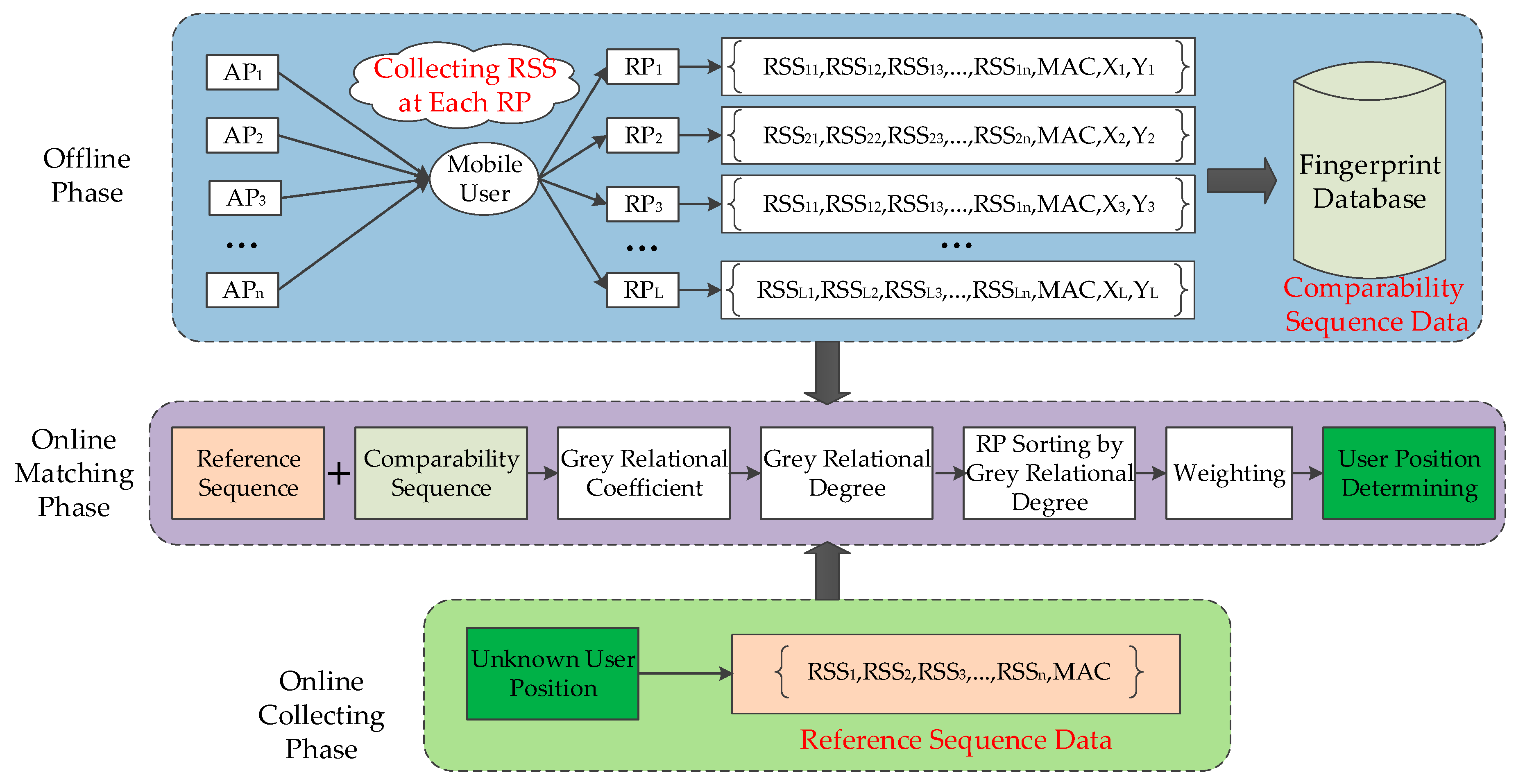
3.1. Overview of GRA-Based Fingerprint Method
3.2. Implementation of Fingerprint Method Based on GRA
4. Experiments and Results
4.1. Experimental Setup
4.2. Evaluation Metrics of Positioning Performance
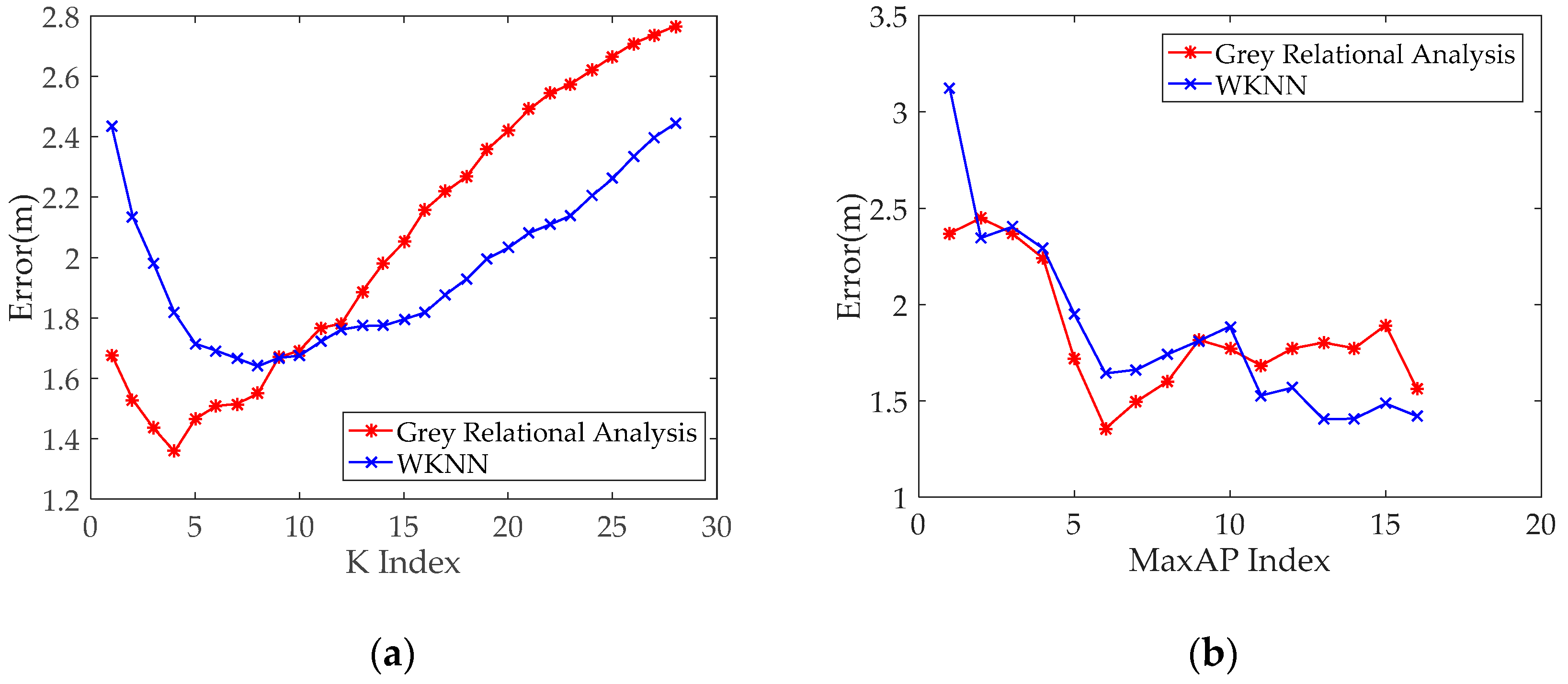
4.3. Parameter Analysis of Different Positioning Methods
4.4. Performance Evaluations of the Proposed Positioning Method
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Enge, P.; Misra, P. Special Issue on Global Positioning System. Proc. IEEE 1999, 87, 3–15. [Google Scholar] [CrossRef]
- Bulusu, N.; Heidemann, J.; Estrin, D. GPS-less low-cost outdoor localization for very small devices. IEEE Pers. Commun. 2000, 7, 28–34. [Google Scholar] [CrossRef] [Green Version]
- Karegar, P.A. Wireless fingerprinting indoor positioning using affinity propagation clustering methods. Wirel. Netw. 2018, 24, 2825–2833. [Google Scholar] [CrossRef]
- Bisio, I.; Cerruti, M.; Lavagetto, F.; Marchese, M.; Pastorino, M.; Randazzo, A.; Sciarrone, A. A trainingless WiFi fingerprint positioning approach over mobile devices. IEEE Antennas Wirel. Propag. Lett. 2014, 13, 832–835. [Google Scholar] [CrossRef]
- Niculescu, D.; Nath, B. Ad Hoc Positioning System Using AOA. In Proceedings of the Twenty-second Annual Joint Conference of the IEEE Computer and Communications Societies, San Francisco, CA, USA, 30 March–3 April 2003; pp. 1734–1743. [Google Scholar]
- Li, X.; Pahlavan, K. Super-resolution TOA estimation with diversity for indoor geolocation. IEEE Trans. Wirel. Commun. 2004, 3, 224–234. [Google Scholar] [CrossRef]
- Amar, A.; Leus, G. A Reference-free Time Difference of Arrival Source Positioning Using a Passive Sensor Array. In Proceedings of the IEEE Sensor Array Multichannel Signal Process. Workshop (SAM), Jerusalem, Israel, 4–7 October 2010; pp. 157–160. [Google Scholar]
- Dakkak, M.; Nakib, A.; Daachi, B. Indoor Positioning Method Based on RTT and AOA Using Coordinates Clustering. Comput. Netw. 2011, 55, 1794–1803. [Google Scholar] [CrossRef]
- Li, Z.; Liu, J.; Wang, Z.; Chen, R.Z. A Novel Fingerprinting Method of WiFi Indoor Positioning Based on Weibull Signal Model. In Proceedings of the China Satellite Navigation Conference (CSNC), Harbin, China, 23–25 May 2018; pp. 2297–2309. [Google Scholar]
- Wang, L.; Chen, R.; Shen, L.; Qiu, H.; Li, M.; Zhang, P.; Pan, Y. NLOS Mitigation in Sparse Anchor Environments with the Misclosure Check Algorithm. Remote Sens. 2019, 11, 773. [Google Scholar] [CrossRef]
- Wang, L.; Chen, R.; Chen, L.; Shen, L.; Zhang, P.; Pan, Y.; Li, M. A Robust Filter for TOA Based Indoor Localization in Mixed LOS/NLOS Environment. In Proceedings of the 2018 Ubiquitous Positioning, Indoor Navigation and Location-Based Services (UPINLBS), Wuhan, China, 22–23 March 2018; pp. 1–9. [Google Scholar]
- Zhang, S.; Guo, J.; Luo, N.; Wang, L.; Wang, W.; Wen, K. Improving Wi-Fi Fingerprint Positioning with a Pose Recognition-Assisted SVM Algorithm. Remote Sens. 2019, 11, 652. [Google Scholar] [CrossRef]
- Oh, J.; Kim, J. Adaptive K-nearest Neighbour Algorithm for WiFi Fingerprint Positioning. ICT Express 2018, 4, 91–94. [Google Scholar] [CrossRef]
- Ma, R.; Guo, Q.; Hu, C. An Improved Wi-Fi Indoor Positioning Algorithm by Weighted Fusion. Sensors 2015, 15, 21824–21843. [Google Scholar] [CrossRef] [PubMed]
- Sánchez-Rodríguez, D.; Alonso-González, I.; Ley-Bosch, C. A Simple Indoor Localization Methodology for Fast Building Classification Models Based on Fingerprints. Electronics 2019, 8, 103. [Google Scholar] [CrossRef]
- Han, C.; Tan, Q.; Sun, L. CSI Frequency Domain Fingerprint-Based Passive Indoor Human Detection. Information 2018, 9, 95. [Google Scholar] [CrossRef]
- Haider, A.; Wei, Y.; Liu, S. Pre-and Post-Processing Algorithms with Deep Learning Classifier for Wi-Fi Fingerprint-Based Indoor Positioning. Electronics 2019, 8, 195. [Google Scholar] [CrossRef]
- Tan, J.; Fan, X.; Wang, S. Optimization-Based Wi-Fi Radio Map Construction for Indoor Positioning Using Only Smart Phones. Sensors 2018, 18, 3095. [Google Scholar] [CrossRef] [PubMed]
- Yang, F.; Xiong, J.; Liu, J.; Wang, C.; Li, Z.; Tong, P.; Chen, R. A Pairwise SSD Fingerprinting Method of Smartphone Indoor Localization for Enhanced Usability. Remote Sens. 2019, 11, 566. [Google Scholar] [CrossRef]
- Garcia-Villalonga, S.; Perez-Navarro, A. Influence of Human Absorption of Wi-Fi Signal in Indoor Positioning with Wi-Fi Fingerprinting. In Proceedings of the International Conference on Indoor Positioning & Indoor Navigation, Banff, AB, Canada, 13–16 October 2015; pp. 1–10. [Google Scholar]
- He, S.; Chan, S.H.G. Wi-Fi Fingerprint-based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutorials 2015, 18, 466–489. [Google Scholar] [CrossRef]
- Correa, A.; Barcelo, M.; Morell, A.; Vicario, J.L. A Review of Pedestrian Indoor Positioning Systems for Mass Market Applications. Sensors 2017, 17, 1927. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K. A Survey of Indoor Localization Systems and Technologies. arXiv 2017, arXiv:1709.01015. [Google Scholar] [CrossRef]
- Karaagac, A.; Haxhibeqiri, J.; Ridolfi, M.; Joseph, W.; Moerman, I.; Hoebeke, J. Evaluation of Accurate Indoor Localization Systems in Industrial Environments. In Proceedings of the IEEE International Conference on Emerging Technologies and Factory Automation, Limassol, Cyprus, 12–15 September 2017. [Google Scholar]
- Dortz, N.L.; Gain, F.; Zetterberg, P. WiFi Fingerprint Indoor Positioning System Using Probability Distribution Comparison. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Kyoto, Japan, 25–30 March 2012; pp. 2301–2304. [Google Scholar]
- Caso, G.; Nardis, L.D. Virtual and Oriented Wi-Fi Fingerprint Indoor Positioning based on Multi-Wall Multi-Floor Propagation Models. Mobile Netw. Appl. 2017, 22, 825–833. [Google Scholar] [CrossRef]
- Nuño-maganda, M.A.; Herrerarivas, H.; Torreshuitzil, C. On-Device Learning of Indoor Location for Wi-Fi Fingerprint Method. Sensors 2018, 18, 2202. [Google Scholar] [CrossRef]
- Santos, R.; Barandas, M.; Leonardo, R. Fingerprints and Floor Plans Construction for Indoor Localisation Based on Crowdsourcing. Sensors 2019, 19, 919. [Google Scholar] [CrossRef] [PubMed]
- Seong, J.H.; Seo, D.H. Real-Time Recursive Fingerprint Radio Map Creation Algorithm Combining Wi-Fi and Geomagnetism. Sensors 2018, 18, 3390. [Google Scholar] [CrossRef] [PubMed]
- Ge, X.; Qu, Z. Optimization WI-FI Indoor Positioning KNN Algorithm Location-based Fingerprint. In Proceedings of the 2016 7th IEEE International Conference on Software Engineering and Service Science, Beijing, China, 26–28 August 2016; pp. 135–137. [Google Scholar]
- Ma, J.; Li, X.; Tao, X.P.; Lu, J. Cluster filtered KNN: A WLAN-based Indoor Positioning Scheme. In Proceedings of the 2008 International Symposium on a World of Wireless, Mobile and Multimedia Networks, Newport Beach, CA, USA, 23–26 June 2008; pp. 1–8. [Google Scholar]
- Dawes, B.; Chin, K.W. A Comparison of Deterministic and Probabilistic Methods for Indoor Localization. J. Syst. Softw. 2011, 84, 442–451. [Google Scholar] [CrossRef]
- Chen, L.H.; Wu, H.K.; Jin, M.H.; Chen, G.H. Homogeneous Features Utilization to Address the Device Heterogeneity Problem in Fingerprint Localization. IEEE Sens. J. 2014, 14, 998–1005. [Google Scholar] [CrossRef]
- Haeberlen, A. Practical Robust Localization over Large-scale 802.11 Wireless Networks. In Proceedings of the International Conference on Mobile Computing and Networking, Philadelphia, PA, USA, 26 September–1 October 2004; pp. 70–84. [Google Scholar]
- Kjærgaard, M.B. Automatic Mitigation of Sensor Variations for Signal Strength based Location Systems. In Proceedings of the International Conference on Location- and Context-Awareness, Dublin, Ireland, 10–11 May 2006; pp. 30–47. [Google Scholar]
- Laoudias, C.; Piché, R.; Panayiotou, C.G. Device Signal Strength Self-Calibration using Histograms. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Sydney, Australia, 13–15 November 2012; pp. 1–8. [Google Scholar]
- Tsui, A.W.; Chuang, Y.H.; Chu, H.H. Unsupervised Learning for Solving RSS Hardware Variance Problem in WiFi Localization. Mob. Netw. Appl. 2009, 14, 677–691. [Google Scholar] [CrossRef]
- Shu, Y.; Huang, Y.; Zhang, J.; Coué, P.; Cheng, P.; Chen, J.; Kang, G.S. Gradient-Based Fingerprinting for Indoor Localization and Tracking. IEEE Trans. Ind. Electron. 2016, 63, 2424–2433. [Google Scholar] [CrossRef]
- Dong, F.; Chen, Y.; Liu, J.; Ning, Q.; Piao, S. A Calibration-Free Localization Solution for Handling Signal Strength Variance. In Proceedings of the International Conference on Mobile Entity Localization and Tracking in GPS-Less Environments, Orlando, FL, USA, 30 September 2009; pp. 79–90. [Google Scholar]
- Hossain, A.K.M.M.; Jin, Y.; Soh, W.S.; Van, H.N. SSD: A Robust RF Location Fingerprint Addressing Mobile Devices’ Heterogeneity. IEEE Trans. Mob. Comput. 2013, 12, 65–77. [Google Scholar] [CrossRef]
- Liu, B.C.; Lin, K.H.; Wu, J.C. Analysis of Hyperbolic and Circular Positioning Algorithms Using Stationary Signal-strength-difference Measurements in Wireless Communications. IEEE Trans. Veh. Technol. 2006, 55, 499–509. [Google Scholar] [CrossRef]
- Kjrgaard, M.B.; Munk, C.V. Hyperbolic Location Fingerprinting: A Calibration-Free Solution for Handling Differences in Signal Strength. In Proceedings of the IEEE International Conference on Pervasive Computing and Communications, Hong Kong, China, 17–21 March 2008; pp. 110–116. [Google Scholar]
- Fang, S.H.; Wang, C.H. A Novel Fused Positioning Feature for Handling Heterogeneous Hardware Problem. IEEE Trans. Commun. 2015, 63, 2713–2723. [Google Scholar] [CrossRef]
- Fang, S.H.; Wang, C.H.; Chiou, S.M.; Lin, P. Calibration-Free Approaches for Robust Wi-Fi Positioning against Device Diversity: A Performance Comparison. In Proceedings of the Vehicular Technology Conference, Yokohama, Japan, 6–9 May 2012; pp. 1–5. [Google Scholar]
- Han, S.; Zhao, C.; Meng, W.; Li, C. Cosine Similarity Based Fingerprinting Algorithm in WLAN Indoor Positioning Against Device Diversity. In Proceedings of the IEEE International Conference on Communications, London, UK, 8–12 June 2015; pp. 2710–2714. [Google Scholar]
- Caso, G.; De Nardis, L.; Di Benedetto, M.G. Frequentist Inference for WiFi Fingerprinting 3D Indoor Positioning. In Proceedings of the 2015 IEEE International Conference on Communication Workshop, London, UK, 8–12 June 2015; pp. 809–814. [Google Scholar]
- Yang, S.; Dessai, P.; Verma, M.; Gerla, M. FreeLoc: Calibration-free crowdsourced indoor localization. In Proceedings of the 2013 Proceedings IEEE INFOCOM, Turin, Italy, 14–19 April 2013; pp. 2481–2489. [Google Scholar]
- Chen, X.; Kong, J.; Guo, Y.; Chen, X. An empirical study of indoor localization algorithms with densely deployed APs. In Proceedings of the 2014 IEEE Global Communications Conference, Austin, TX, USA, 8–12 December 2014; pp. 517–522. [Google Scholar]
- Ning, C.; Yao, L.; Huaqiang, H. Grey Relational Analysis between Comprehensive Bonded Zone and Regional Economic Development. In Proceedings of the International Conference on Environmental Science & Information Application Technology, Wuhan, China, 17–18 July 2010; pp. 273–275. [Google Scholar]
- Yin, L.L.; Han, Z.H.; Wu, M. Data Processing in the Application of Grey Relational Analysis Model in Regional Economic Openness of Evaluation System. Appl. Mechan. Mater. 2014, 685, 744–748. [Google Scholar] [CrossRef]
- Du, Z.; Liao, H. A Novel Location Estimation Algorithm Using Grey Relational Analysis. In Proceedings of the 2006 International Conference on Communication Technology, Guilin, China, 27–30 November 2006; pp. 1–5. [Google Scholar]
- Xiao, F.; Chen, J.; Xie, X.; Sun, L.; Wang, R. TA3C: Teaching-Oriented Adaptive Wi-Fi Authorized Access Control Based on CSI. In Proceedings of the 12th International Conference on Mobile Ad-Hoc and Sensor Networks, Hefei, China, 16–18 December 2016; pp. 306–312. [Google Scholar]
- Bell, S. A beginner’s guide to uncertainty of measurement. Meas. Good Pract. Guide 1999, 11, 1. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Smartphones | Wi-Fi Module | Standards | Antenna Position |
|---|---|---|---|
| Redmi 5plus | Qualcomm-QFE2101 | IEEE 802.11 a/b/g/n | Both near top and bottom |
| Honor 9 | Broadcom-BCM43455XKUBG | IEEE 802.11 a/b/g/n/ac | Near upper left |
| Redmi Note 3 | MT6630QP | IEEE 802.11 a/b/g/n/ac | Near bottom of the phone |
| Mi 6 | Qualcomm-WCN3990 | IEEE 802.11 a/b/g/n/ac | Near the four corners |
| Evaluation Parameters | Definition |
|---|---|
| Estimated TP Location | TL |
| True TP Location | TLtruth |
| Absolute Error | |
| Mean Absolute Error | |
| Standard Deviation | |
| Standard Uncertainty | |
| Root Mean Square Error |
| Fingerprint Data | Testing Data | Method | MAE (m) | RMSE (m) | STD (m) | STU (m) |
|---|---|---|---|---|---|---|
| Redmi5 plus | Redmi5 plus | WKNN | 1.3824 | 1.4908 | 0.5653 | 0.0905 |
| Bayesian | 1.5139 | 1.8072 | 0.9998 | 0.1601 | ||
| CS | 2.1217 | 2.3199 | 0.9505 | 0.1522 | ||
| GRA | 1.2682 | 1.3687 | 0.5214 | 0.0835 | ||
| PCR | 2.0520 | 2.1991 | 0.8009 | 0.1282 | ||
| Redmi5 plus | Honor 9 | WKNN | 1.7378 | 1.8728 | 0.7235 | 0.1159 |
| Bayesian | 1.8328 | 2.1251 | 1.0897 | 0.1745 | ||
| CS | 2.6342 | 2.8704 | 1.1550 | 0.1849 | ||
| GRA | 1.3302 | 1.5240 | 0.7074 | 0.1133 | ||
| PCR | 2.5834 | 2.8058 | 1.1090 | 0.1776 | ||
| Redmi5 plus | Redmi Note 3 | WKNN | 1.8772 | 2.0375 | 0.8025 | 0.1285 |
| Bayesian | 2.1427 | 2.4307 | 1.1627 | 0.1862 | ||
| CS | 2.6682 | 2.9119 | 1.1815 | 0.1892 | ||
| GRA | 1.5288 | 1.7205 | 0.7997 | 0.1281 | ||
| PCR | 2.6188 | 2.8272 | 1.0794 | 0.1728 | ||
| Redmi5 plus | Mi 6 | WKNN | 2.4767 | 2.7356 | 1.1769 | 0.1885 |
| Bayesian | 3.1304 | 3.6815 | 1.9630 | 0.3143 | ||
| CS | 2.6776 | 2.9156 | 1.1690 | 0.1872 | ||
| GRA | 2.1027 | 2.3112 | 0.9718 | 0.1556 | ||
| PCR | 2.5581 | 2.7549 | 1.0360 | 0.1659 |
| Fingerprint Data | Testing Data | Method | MAE (m) | RMSE (m) | STD (m) | STU (m) |
|---|---|---|---|---|---|---|
| Honor 9 | Honor 9 | WKNN | 1.5234 | 1.6392 | 0.6131 | 0.0982 |
| Bayesian | 1.6259 | 1.8977 | 0.9913 | 0.1587 | ||
| CS | 2.1477 | 2.3336 | 0.9248 | 0.1481 | ||
| GRA | 1.3958 | 1.5852 | 0.5612 | 0.0899 | ||
| PCR | 1.9985 | 2.1450 | 0.7892 | 0.1264 | ||
| Honor 9 | Redmi5 plus | WKNN | 1.7649 | 1.8874 | 0.6778 | 0.1085 |
| Bayesian | 1.8667 | 2.0040 | 0.7385 | 0.1183 | ||
| CS | 2.6538 | 2.9000 | 1.1846 | 0.1897 | ||
| GRA | 1.5232 | 1.7072 | 0.6509 | 0.1042 | ||
| PCR | 2.6402 | 2.8611 | 1.1166 | 0.1788 | ||
| Honor 9 | Redmi Note 3 | WKNN | 1.8500 | 1.9953 | 0.7572 | 0.1212 |
| Bayesian | 2.1344 | 2.4489 | 1.2163 | 0.1948 | ||
| CS | 2.6740 | 2.9300 | 1.2132 | 0.1943 | ||
| GRA | 1.6273 | 1.8510 | 0.6935 | 0.1110 | ||
| PCR | 2.5801 | 2.7815 | 1.0527 | 0.1686 | ||
| Honor 9 | Mi 6 | WKNN | 2.5087 | 2.6865 | 1.0737 | 0.1719 |
| Bayesian | 2.7199 | 3.1779 | 1.6652 | 0.2666 | ||
| CS | 2.7084 | 2.9596 | 1.2088 | 0.1936 | ||
| GRA | 2.0892 | 2.3252 | 1.0341 | 0.1656 | ||
| PCR | 2.5180 | 2.7088 | 1.1219 | 0.1796 |
| Fingerprint Data | Testing Data | Method | MAE (m) | RMSE (m) | STD (m) | STU (m) |
|---|---|---|---|---|---|---|
| Redmi5 plus | Redmi5 plus | WKNN(RSS) | 1.3824 | 1.4908 | 0.5653 | 0.0905 |
| WKNN(DIFF) | 1.4286 | 1.5508 | 0.6113 | 0.0979 | ||
| WKNN(SSD) | 1.5372 | 1.6606 | 0.6362 | 0.1019 | ||
| WKNN(HLF) | 1.6554 | 1.8069 | 0.7336 | 0.1175 | ||
| GRA(RSS) | 1.2682 | 1.3687 | 0.5214 | 0.0835 | ||
| LCS | 1.5736 | 1.7201 | 0.7037 | 0.1127 | ||
| Redmi5plus | Honor 9 | WKNN(RSS) | 1.7378 | 1.8728 | 0.7074 | 0.1133 |
| WKNN(DIFF) | 1.4969 | 1.6217 | 0.6520 | 0.1044 | ||
| WKNN(SSD) | 1.5975 | 1.7202 | 0.6464 | 0.1035 | ||
| WKNN(HLF) | 1.7105 | 1.8556 | 0.7288 | 0.1167 | ||
| GRA(RSS) | 1.3302 | 1.5240 | 0.6235 | 0.0998 | ||
| LCS | 1.6581 | 1.7881 | 0.6738 | 0.1086 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Guo, J.; Luo, N.; Zhang, D.; Wang, W.; Wang, L. A Calibration-Free Method Based on Grey Relational Analysis for Heterogeneous Smartphones in Fingerprint-Based Indoor Positioning. Sensors 2019, 19, 3885. https://doi.org/10.3390/s19183885
Zhang S, Guo J, Luo N, Zhang D, Wang W, Wang L. A Calibration-Free Method Based on Grey Relational Analysis for Heterogeneous Smartphones in Fingerprint-Based Indoor Positioning. Sensors. 2019; 19(18):3885. https://doi.org/10.3390/s19183885
Chicago/Turabian StyleZhang, Shuai, Jiming Guo, Nianxue Luo, Di Zhang, Wei Wang, and Lei Wang. 2019. "A Calibration-Free Method Based on Grey Relational Analysis for Heterogeneous Smartphones in Fingerprint-Based Indoor Positioning" Sensors 19, no. 18: 3885. https://doi.org/10.3390/s19183885
APA StyleZhang, S., Guo, J., Luo, N., Zhang, D., Wang, W., & Wang, L. (2019). A Calibration-Free Method Based on Grey Relational Analysis for Heterogeneous Smartphones in Fingerprint-Based Indoor Positioning. Sensors, 19(18), 3885. https://doi.org/10.3390/s19183885