Completion Time Minimization for Multi-UAV Information Collection via Trajectory Planning



Abstract
:1. Introduction
- To the best of our knowledge, this is the first paper to study how to minimize the mission completion time considering the information collection quality when multiple rotary-wing UAVs collect information cooperatively in WSNs. We model it as a mixed-integer non-convex problem, which has been proved to be NP-hard.
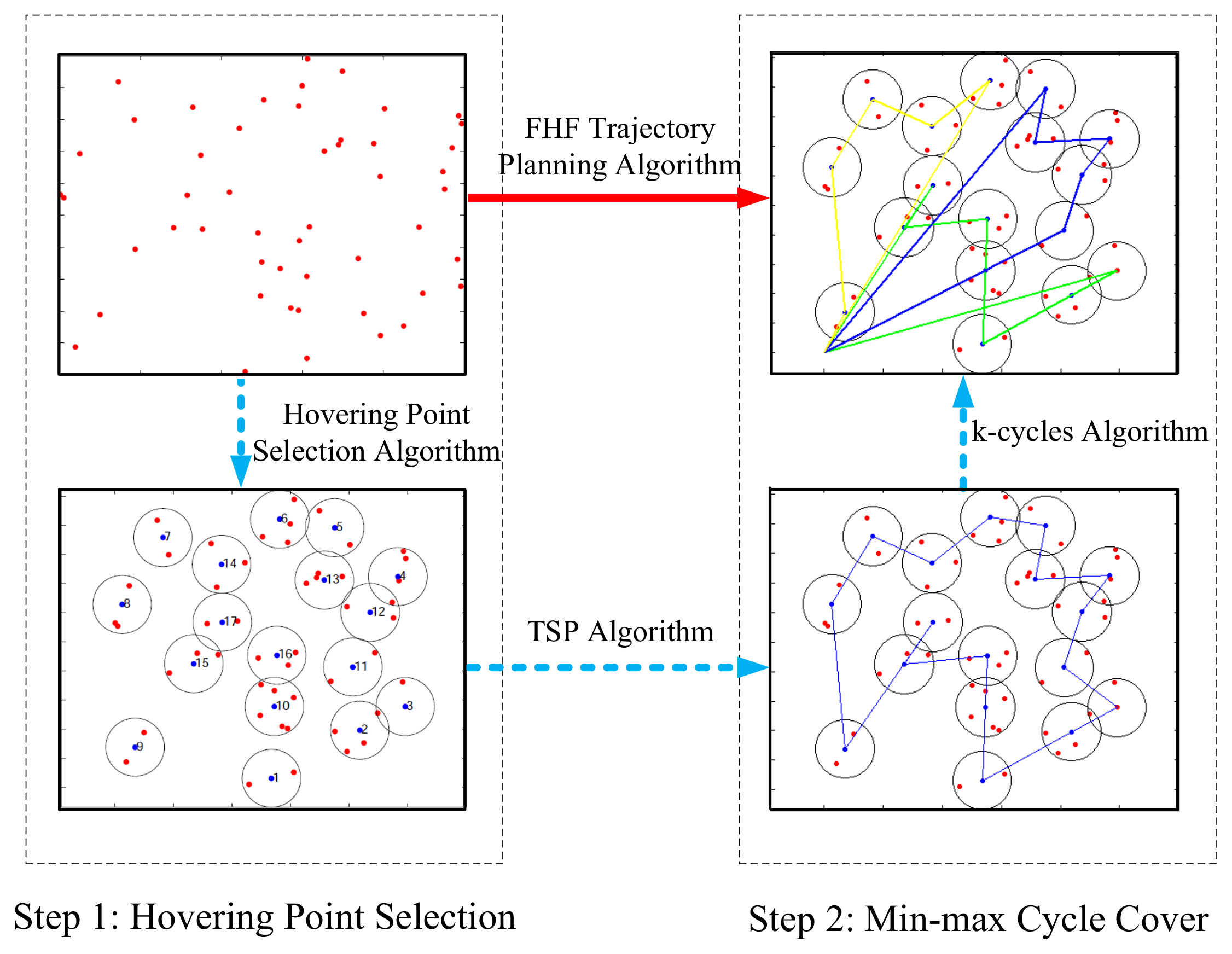
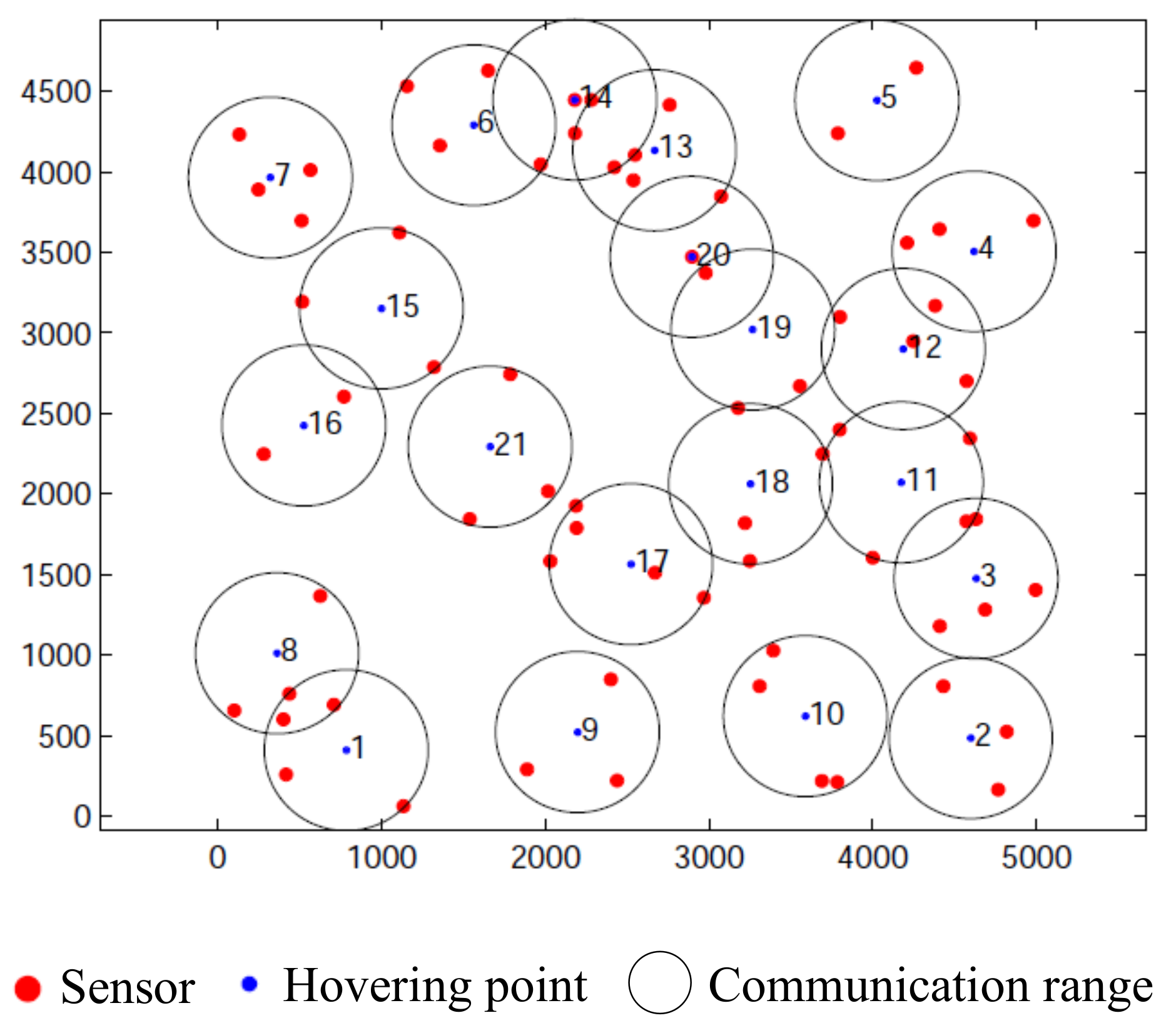
- We first propose the FHF algorithm to optimize the hovering points and obtain the trajectories. We select appropriate hovering points where the UAVs can sequentially collect the information from multiple sensors. We model this problem as a BS coverage problem with the information collection quality in consideration. Then, we use a min-max cycle cover algorithm to assign these hovering points and get the trajectory of each UAV.
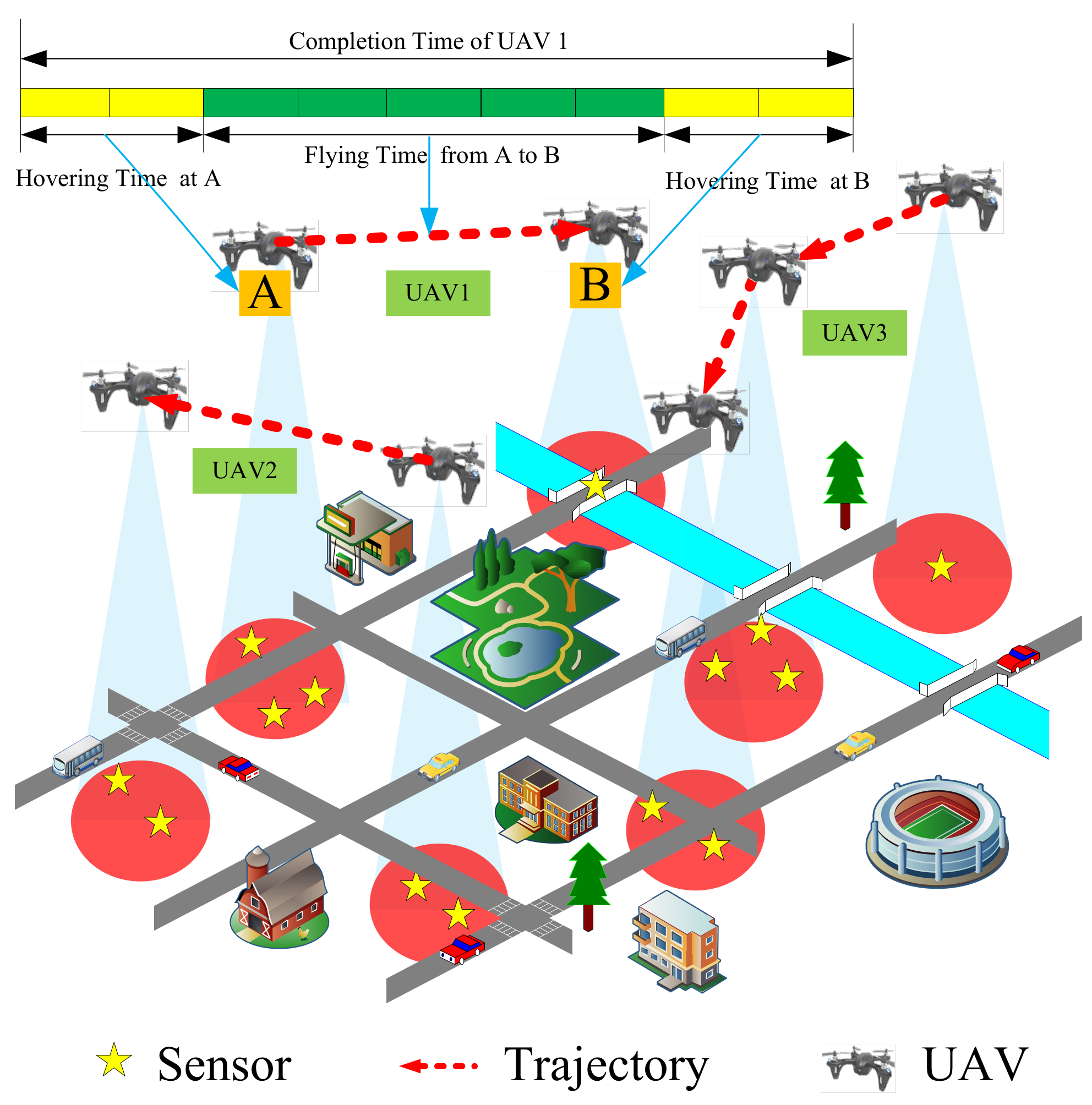
- With the obtained UAVs trajectories, we further consider that the UAVs can also collect information when flying. We propose an effective method to optimize UAVs hovering- and fly-collection time allocations.
- Extensive simulation results show the mission completion time of the proposed algorithm is minimum and closer to the optimal scheme compared with other algorithms. Furthermore, we also verify the performance of the algorithms under different settings.
2. Related Work
2.1. Single UAV’s Mission Completion Time Problem
2.2. Multi-UAV’s Mission Completion Time Problem
3. System Model and Problem Formulation
3.1. System Model
3.2. Problem Formulation
4. FHF Trajectory Planning Algorithm
4.1. Hovering Point Selection
| Algorithm 1 Hovering point selection algorithm. |
|
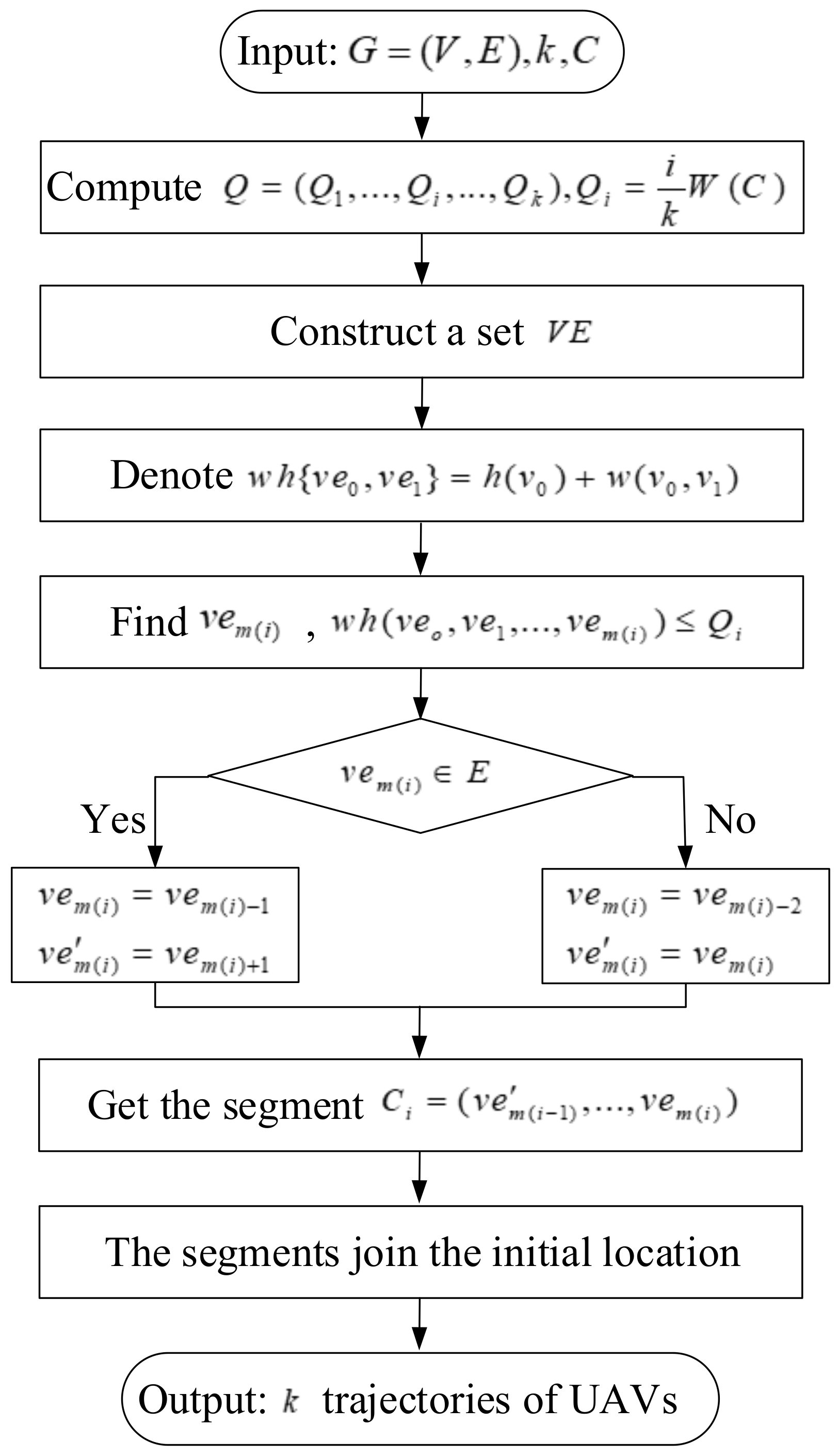
4.2. Min-Max Cycle Cover
- If is a path, we would delete this path when we decompose the cycle. Then, we define as the ending point of this segment, as the starting point of the next segment.
- If is a hovering point, we would define it as the starting point of the next segment (i.e., ). Then, we take as the end of this segment.
5. Time Allocation
6. Simulation Results
6.1. Simulation Setup
6.2. Baseline Setup
- FHF algorithm: It is the subalgorithm of the FLY algorithm. This algorithm only considers the UAVs collecting information when they are hovering.
- Hovering above each sensor (SHP): The feasible trajectory of the UAV needs to ensure the throughput requirement of each sensor is satisfied. One straightforward approach is to let the UAVs sequentially visit all sensors. First, SHP algorithm calculates a cycle which covers all sensors using TSP algorithm. Then, it uses k-cycles algorithm to obtain the trajectories of UAVs.
- Sensor balanced algorithm (PB): This algorithm first calculates a cycle by using TSP algorithm. Then, it decomposes the cycle into k trajectories that contain the same number of sensors.
- KTSP-based algorithm (KTSP): This algorithm designs the trajectories of multi-UAV by using K-Traveling Salesman Problem (KTSP) algorithm [53].
- Kmeans-based algorithm (KMEAN): This algorithm uses kmeans algorithm to obtain hovering points. Then, it uses the min-max cycle cover algorithm to obtain the trajectories of UAVs [54].
- Optimal scheme (OPT): To evaluate how the proposed algorithms approach the optimal performance, we use brute-force searching method to obtain the optimal scheme that minimizes the mission completion time.
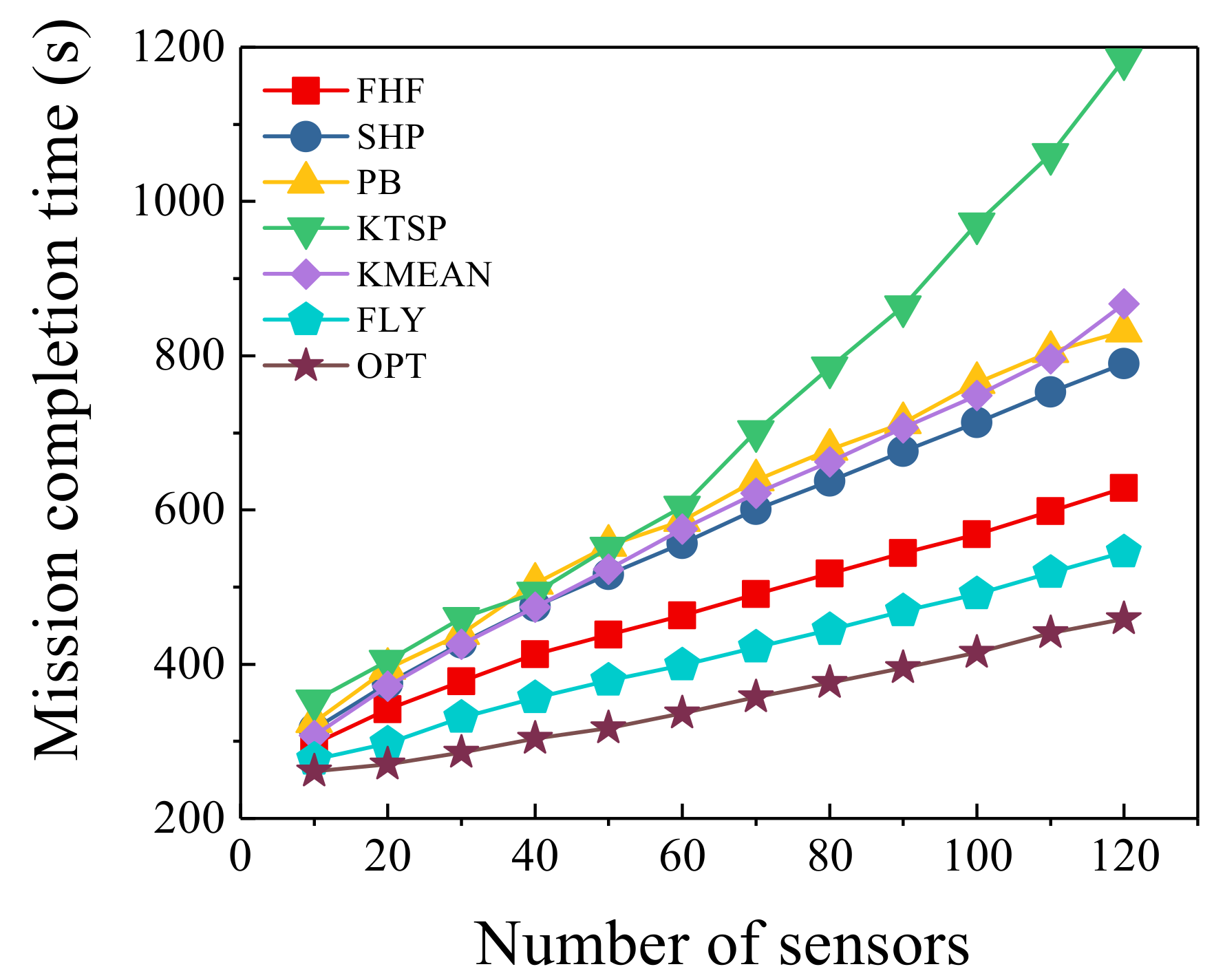
6.3. Different Number of Sensors
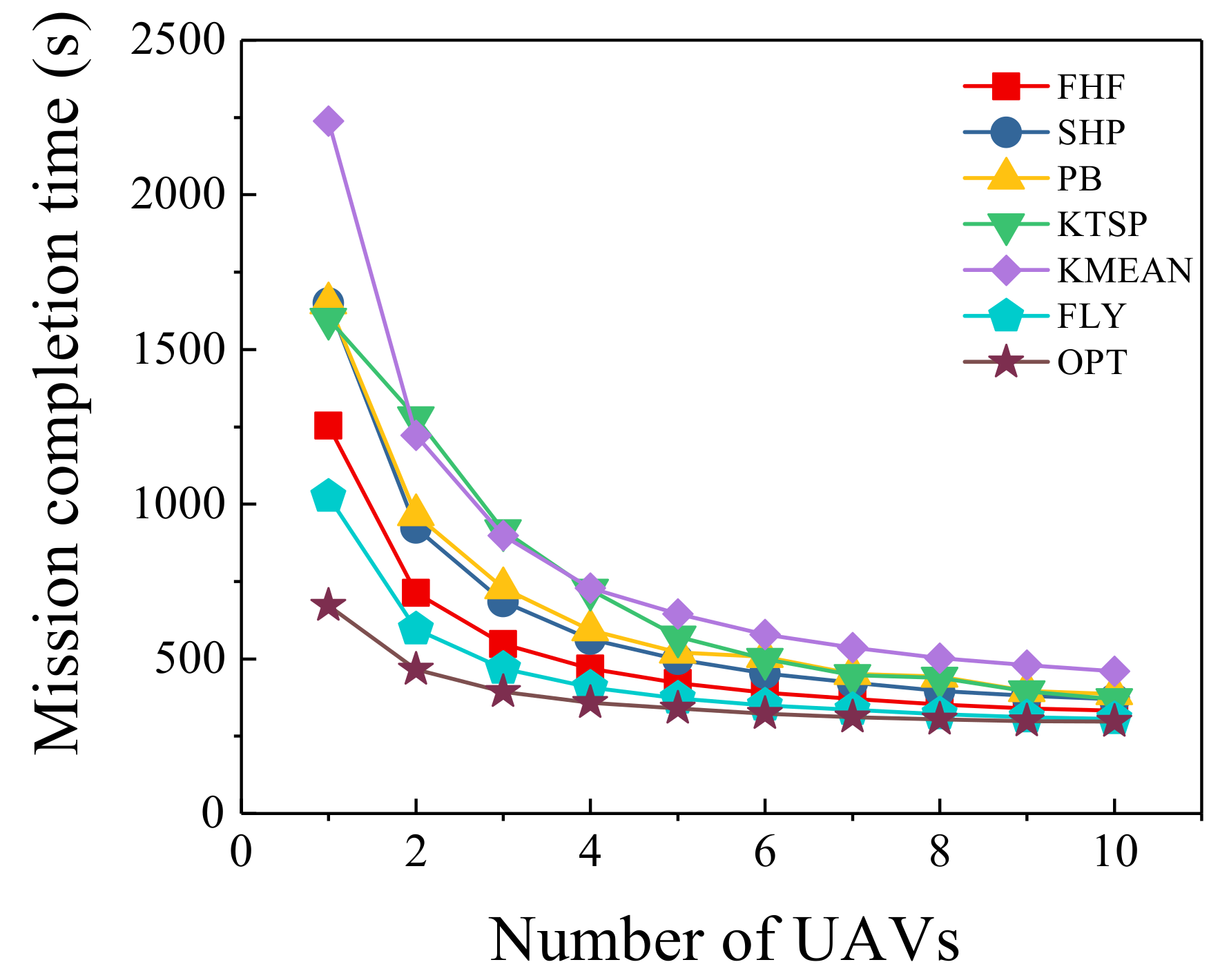
6.4. Different Number of UAVs
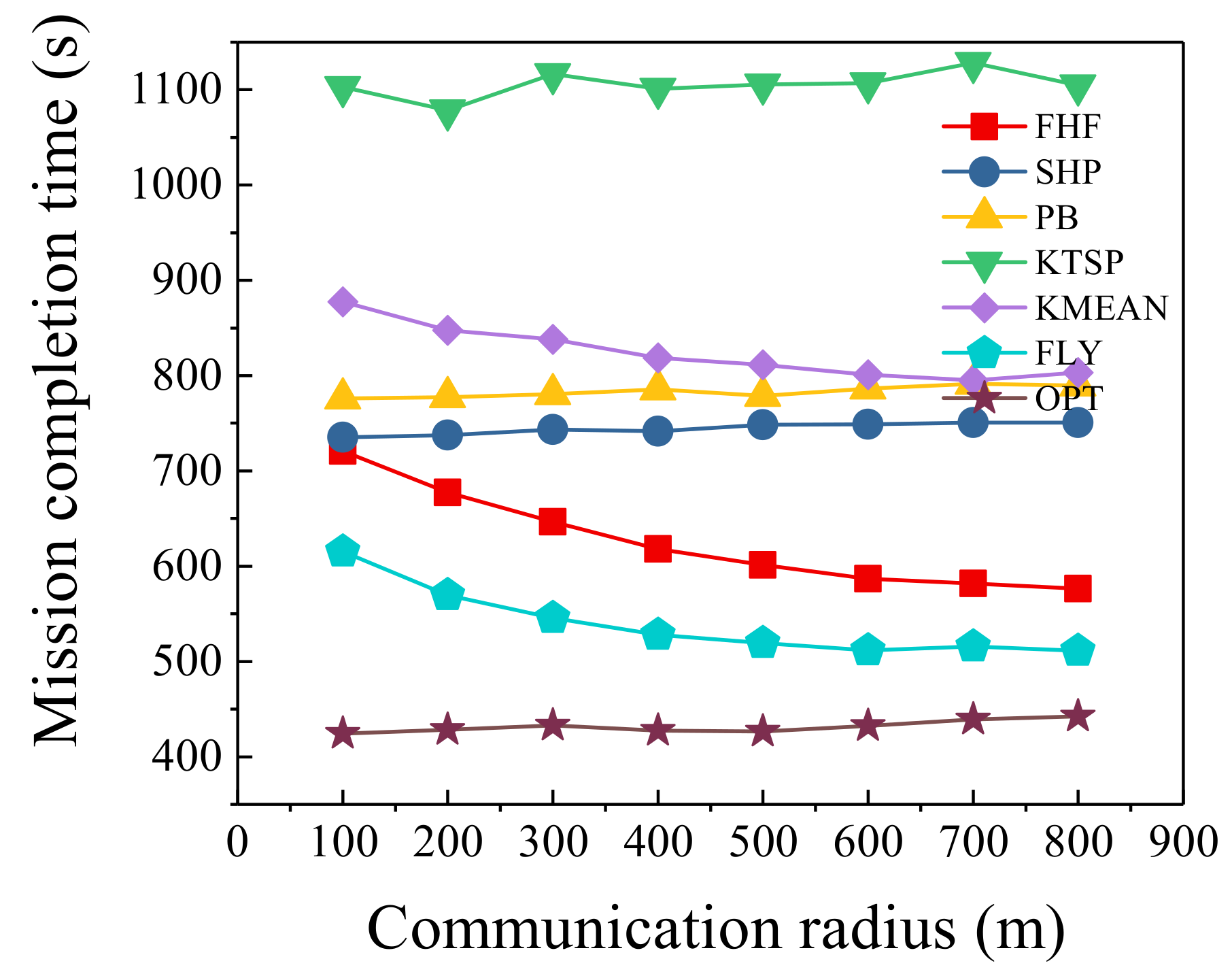
6.5. Different Communication Radius
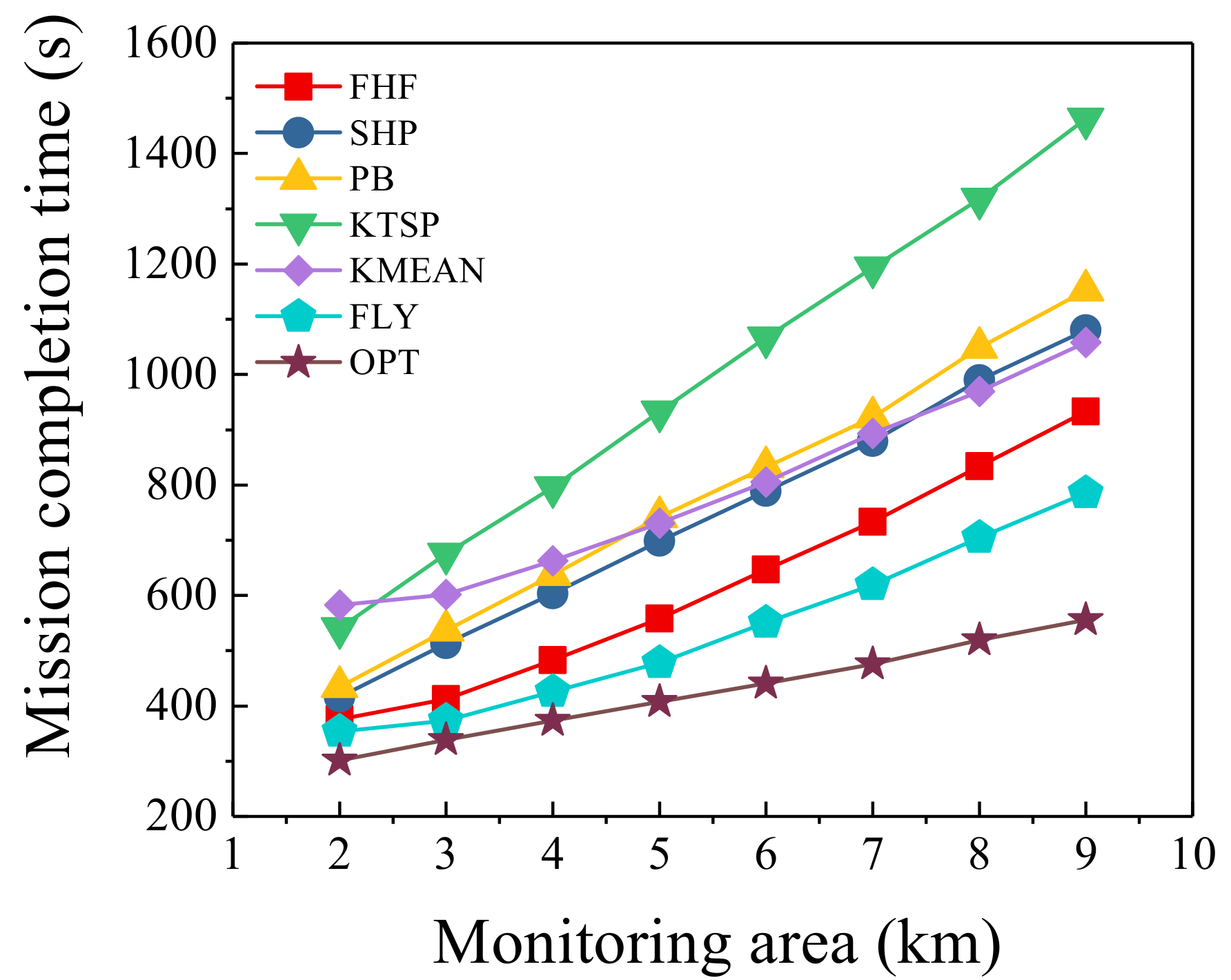
6.6. Different Monitoring Area Size
7. Discussion
7.1. Trade-Offs in Communication and Trajectory Design
7.2. Multiple Access Schemes
7.3. The Case of a Large Number of Sensors
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ma, C.; Liang, W.; Zheng, M.; Sharif, H. A connectivity-aware approximation algorithm for relay node placement in Wireless Sensor Networks. IEEE Sens. J. 2015, 16, 515–528. [Google Scholar] [CrossRef]
- Zhao, M.; Li, J.; Yang, Y. A framework of joint mobile energy replenishment and data gathering in Wireless Rechargeable Sensor Networks. IEEE Trans. Mob. Comput. 2014, 13, 2689–2705. [Google Scholar] [CrossRef]
- Kim, H.; Han, S. An efficient sensor deployment scheme for large-scale Wireless Sensor Networks. IEEE Commun. Lett. 2015, 19, 98–101. [Google Scholar] [CrossRef]
- Bukhari, S.H.R.; Rehmani, M.H.; Siraj, S. A survey of channel bonding for wireless networks and guidelines of channel bonding for futuristic cognitive radio sensor networks. IEEE Commun. Surv. Tutor. 2015, 18, 924–948. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Mobile Unmanned Aerial Vehicles (UAVs) for energy- efficient Internet of Things communications. IEEE Trans. Wirel. Commun. 2017, 16, 7574–7589. [Google Scholar] [CrossRef]
- Abdulla, A.E.A.A.; Fadlullah, Z.M.; Nishiyama, H.; Kato, N.; Ono, F.; Miura, R. An optimal data collection technique for improved utility in UAS-aided networks. In Proceedings of the 2014 IEEE International Conference on Computer Communications (INFOCOM), Toronto, ON, Canada, 27 April–2 May 2014. [Google Scholar]
- Zhan, C.; Zeng, Y.; Zhang, R. Energy-efficient data collection in UAV enabled wireless sensor network. IEEE Commun. Lett. 2017, 7, 328–331. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Teng, J.L. Wireless communications with Unmanned Aerial Vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Yang, D.; Wu, Q.; Zeng, Y.; Zhang, R. Energy trade-off in ground-to-UAV communication via trajectory design. IEEE Trans. Veh. Technol. 2018, 67, 6721–6726. [Google Scholar] [CrossRef]
- Zhan, C.; Lai, H. Energy minimization in Internet-of-Things system based on rotary-wing UAV. IEEE Commun. Lett. 2019. [Google Scholar] [CrossRef]
- Hou, H.; Wang, L. Analysis on time-variant air-to-ground radio communication channel for rotary-wing UAVs. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019. [Google Scholar]
- Al-Hourani, A.; Kandeepan, S.; Lardner, S. Optimal LAP altitude for maximum coverage. IEEE Wirel. Commun. Lett. 2014, 3, 569–572. [Google Scholar] [CrossRef]
- Azari, M.M.; Rosas, F.; Chen, K.C.; Pollin, S. Optimal UAV positioning for terrestrial-aerial communication in presence of fading. In Proceedings of the 2016 IEEE Global Communication Conference (GLOBECOM), Washington, DC, USA, 4–8 Decmber 2016. [Google Scholar]
- Alzenad, M.; El-Keyi, A.; Lagum, F.; Yanikomeroglu, H. 3-D placement of an Unmanned Aerial Vehicle Base Station (UAV-BS) for energy-efficient maximal coverage. IEEE Wirel. Commun. Lett. 2017, 6, 434–437. [Google Scholar] [CrossRef]
- Lyu, J.; Zeng, Y.; Zhang, R.; Lim, T.J. Placement optimization of UAV-mounted mobile base stations. IEEE Wirel. Commun. Lett. 2017, 21, 604–607. [Google Scholar] [CrossRef]
- Zeng, Y.; Xu, X.; Zhang, R. Trajectory design for completion time minimization in UAV-enabled multicasting. IEEE Trans. Wirel. Commun. 2018, 17, 2233–2246. [Google Scholar] [CrossRef]
- Zhang, J.; Zeng, Y.; Zhang, R. UAV-enabled radio access network: Multi-mode communication and trajectory design. IEEE Trans. Signal Proces. 2018, 66, 5269–5284. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R. Energy-efficient UAV communication with trajectory optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760. [Google Scholar] [CrossRef]
- Zhang, S.; Zeng, Y.; Zhang, R. Cellular-enabled UAV communication: A connectivity-constrained trajectory optimization perspective. IEEE Trans. Commun. 2018, 67, 2580–2604. [Google Scholar] [CrossRef]
- Lim, C.; Park, S.; Ryoo, C.; Choi, K. A path planning algorithm for surveillance UAVs with timing mission constrains. In Proceedings of the 2010 IEEE International Conference on Control, Automation and Systems (ICCAS), Gyeonggi-do, Korea, 27–30 October 2010. [Google Scholar]
- Zhang, C.; Meng, X. Spare A* search approach for UAV route planning. In Proceedings of the 2017 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 27–29 October 2017. [Google Scholar]
- Gong, J.; Chang, T.; Shen, C.; Chen, X. Flight time minimization of UAV for data collection over wireless sensor networks. IEEE J. Sel. Areas Commun. 2018, 36, 1942–1954. [Google Scholar] [CrossRef]
- Shin, H.; Leboucher, C.; Tsourdos, A. Resource allocation with cooperative path planning for multiple UAVs. In Proceedings of the 2012 IEEE UKACC International Conference on Control, Cardiff, UK, 3–5 September 2012. [Google Scholar]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Wireless communication using Unmanned Aerial Vehicles (UAVs): Optimal transport theory for hover time optimization. IEEE Trans. Wirel. Commun. 2017, 16, 8052–8066. [Google Scholar] [CrossRef]
- Wu, Q.; Xu, J.; Zhang, R. Capacity characterization of UAV-enabled two-user broadcast channel. IEEE J. Sel. Areas Commun. 2018, 36, 1955–1971. [Google Scholar] [CrossRef]
- Hu, Y.; Yuan, X.; Xu, J.; Schmeink, A. Optimal 1D trajectory design for UAV-enabled multiuser wireless power transfer. IEEE Trans. Commun. 2019, 67, 5674–5688. [Google Scholar] [CrossRef]
- Xie, L.; Xu, J.; Zhang, R. Throughput maximization for UAV-enabled wireless powered communication networks. IEEE IoT J. 2018, 6, 1690–1703. [Google Scholar] [CrossRef]
- Wu, Y.; Xu, J.; Qiu, L.; Zhang, R. Capacity of UAV-enabled multicast channel: Joint trajectory design and power allocation. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018. [Google Scholar]
- Yang, G.; Dai, R.; Liang, Y. Energy-efficient UAV backscatter communication with joint trajectory and resource optimization. In Proceedings of the 2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019. [Google Scholar]
- Xu, J.; Zeng, Y.; Zhang, R. UAV-enabled wireless power transfer: Trajectory design and energy optimization. IEEE Trans. Wirel. Commun. 2018, 17, 5092–5106. [Google Scholar] [CrossRef]
- Pohl, A.J.; Lamont, G.B. Multi-objective UAV mission planning using evolutionary computation. In Proceedings of the 2008 IEEE Winter Simulation Conference, Miami, FL, USA, 7–10 December 2008. [Google Scholar]
- Shi, Z.; Huang, X.; Hua, Y.; Xu, D. Statistical physics method for multi-base multi-UAV cooperative reconnaissance mission planning. In Proceedings of the 2015 IEEE Advanced Information Technology, Electronic and Automation Control Conference, Chongqing, China, 19–20 December 2015. [Google Scholar]
- Hayat, S.; Yanmaz, E.; Brown, T.X.; Bettstetter, C. Multi-objective UAV path planning for search and rescue. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation, Singapore, 20 May–3 June 2017. [Google Scholar]
- Mousavi, S.; Afghah, F.; Ashdown, J.D.; Turck, K. Leader-follower based coalition formation in large-scale UAV networks, a quantum evolutionary approach. In Proceedings of the 2018 IEEE International Conference on Computer Communications Workshops (INFOCOM WKSHPS), Honolulu, HI, USA, 15–19 April 2018. [Google Scholar]
- Wang, J.J.; Zhang, Y.F.; Geng, L.; Fuh, J.Y.H.; Teo, S.H. Mission planning for heterogeneous tasks with teterogeneous UAVs. In Proceedings of the 2014 IEEE International Conference on Control Automation Robotics & Vision, Singapore, 10–12 December 2014. [Google Scholar]
- Wu, Q.; Zeng, Y.; Zhang, R. Joint trajectory and communication design for multi-UAV enabled wireless networks. IEEE Trans. Wirel. Commun. 2018, 17, 2109–2121. [Google Scholar] [CrossRef]
- You, C.; Zhang, R. 3D trajectory optimization in Rician fading for UAV-enabled data harvesting. IEEE Trans. Wirel. Commun. 2019, 18, 3192–3207. [Google Scholar] [CrossRef]
- Yang, L.; Chen, J.; Hasna, M.O.; Yang, H. Outage performance of UAV-assisted relaying systems with RF energy harvesting. IEEE Wirel. Commun. Lett. 2018, 22, 2471–2474. [Google Scholar] [CrossRef]
- Mishra, D.; Lohan, P.; Devi, L.N. Coverage-constrained utility maximization of UAV. In Proceedings of the 2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019. [Google Scholar]
- NA, H.J.; Yoo, S. PSO-based dynamic UAV positioning algorithm for sensing information acquisition in Wireless Sensor Networks. IEEE Access 2019, 7, 77499–77513. [Google Scholar] [CrossRef]
- Burkard, R.E.; Dollani, H. A note on the robust 1-center problem on trees. Ann. Oper. Res. 2002, 110, 69–82. [Google Scholar] [CrossRef]
- Colebrook, M.; Gutiérrez, J.; Alonso, S.; Sicilia, J. A new algorithm for the undesirable 1-center problem on networks. J. Oper. Res. Soc. 2002, 53, 1357–1366. [Google Scholar] [CrossRef]
- Megiddo, N. The weighted Euclidean 1-center problem. Math. Oper. Res. 1983, 8, 498–504. [Google Scholar] [CrossRef]
- Elzinga, J.; Hearn, D.W. Geometrical solutions for some minimax location problems. Transp. Sci. 1972, 6, 379–394. [Google Scholar] [CrossRef]
- Megiddo, N. Linear-time algorithms for linear programming in R3 and related problems. SIAM J. Comput. 1983, 12, 759–776. [Google Scholar] [CrossRef]
- Xu, W.; Liang, W.; Lin, X. Approximation algorithms for min-max cycle cover problems. IEEE Trans. Comput. 2015, 64, 600–613. [Google Scholar] [CrossRef]
- Sun, Y.; Dong, W.; Chen, Y. An improved routing algorithm based on ant colony optimization in wireless sensor networks. IEEE Wirel. Commun. Lett. 2017, 21, 1317–1320. [Google Scholar] [CrossRef]
- Qin, Z.; Dong, C.; Li, A.; Dai, H.; Wu, Q.; Xu, A. Trajectory planning for reconnaissance mission based on fair-energy UAVs cooperation. IEEE Access 2019, 7, 91120–91133. [Google Scholar] [CrossRef]
- Xu, Z.; Xu, L. Approximation algorithms for min-max path cover problems with service handling time. In Proceedings of the 2009 International Symposium on Algorithms and Computation, Honolulu, HI, USA, 16–18 December 2009. [Google Scholar]
- Zeng, Y.; Xu, J.; Zhang, R. Energy minimization for wireless communication with rotary-wing UAV. IEEE Trans. Wirel. Commun. 2019, 18, 2329–2345. [Google Scholar] [CrossRef]
- Zeng, Y.; Xu, J.; Zhang, R. Rotary-wing UAV enabled wireless network: Trajectory design and resource allocation. In Proceedings of the 2018 IEEE Global Communication Conference (GLOBECOM), Abu Dhabi, UAE, 9–13 December 2018. [Google Scholar]
- Wu, Q.; Zhang, R. Common throughput maximization in UAV-enabled OFDMA systems with delay consideration. IEEE Trans. Commun. 2018, 66, 6614–6627. [Google Scholar] [CrossRef]
- Frieze, A.M. An extension of Christofides heuristic to the k-person travelling salesman problem. Discret. Appl. Math. 1983, 6, 79–83. [Google Scholar] [CrossRef] [Green Version]
- Sampedro, C.; Bavle, H.; Sanchez-Lopez, J.L.; Fernandez, R.A.S.; Rodriguez-Ramos, A.; Molina, M.; Campoy, P. A flexible and dynamic mission planning architecture for UAV swarm coordination. In Proceedings of the 2016 IEEE International Conference on Unmanned Aircraft Systems, Arlington, VA, USA, 7–10 June 2016. [Google Scholar]
- Wu, Q.; Liu, L.; Zhang, R. Fundamental trade-offs in communication and trajectory design for UAV-enabled wireless network. IEEE Wirel. Commun. 2019, 26, 36–44. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Definition |
|---|---|
| U | UAV set |
| P | Sensor set |
| UAV i | |
| Sensor j | |
| k | Number of UAVs, or number of trajectories |
| n | Number of sensors |
| trajectory projected on the ground | |
| Time derivative of | |
| Position of | |
| Distance between UAV i and sensor j | |
| Maximum velocity | |
| Minimum inter-UAV distance | |
| Instantaneous channel power gain | |
| Instantaneous channel capacity | |
| Total amount of data of | |
| B | Bandwidth |
| p | Transmission power |
| White Gaussian noise power | |
| H | Altitude of UAV |
| Binary variable | |
| r | Communication radius |
| Flying time | |
| Hovering time | |
| Completion time of | |
| T | Mission Completion time |
| Notation | Definition |
|---|---|
| V | Hovering point set |
| X | Covered sensor set |
| Y | Uncovered sensor set |
| Hovering point’s location | |
| Boundary sensor set | |
| Inner sensor set | |
| A boundary sensor | |
| d | The farthest distance to |
| Definition | Parameters | Values |
|---|---|---|
| Monitoring area size | D | 5 km× 5 km |
| Altitude of UAV | H | 50 m |
| Maximum velocity | 50 m/s | |
| Minimum inter-UAV distance | 100 m | |
| Path loss | ||
| Bandwidth | B | 1 MHz |
| Transmission power | p | 10 dBm |
| Unit channel power gain | −50 dBm | |
| White Gaussian noise power | −110 dBm | |
| Rician factor | 2 | |
| Minimum decodable power | −84 dBm | |
| Frequency of signal | 2.4 GHz | |
| Transmit antenna gain | 1 | |
| Receive antenna gain | 1 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, Z.; Li, A.; Dong, C.; Dai, H.; Xu, Z. Completion Time Minimization for Multi-UAV Information Collection via Trajectory Planning. Sensors 2019, 19, 4032. https://doi.org/10.3390/s19184032
Qin Z, Li A, Dong C, Dai H, Xu Z. Completion Time Minimization for Multi-UAV Information Collection via Trajectory Planning. Sensors. 2019; 19(18):4032. https://doi.org/10.3390/s19184032
Chicago/Turabian StyleQin, Zhen, Aijing Li, Chao Dong, Haipeng Dai, and Zhengqin Xu. 2019. "Completion Time Minimization for Multi-UAV Information Collection via Trajectory Planning" Sensors 19, no. 18: 4032. https://doi.org/10.3390/s19184032
APA StyleQin, Z., Li, A., Dong, C., Dai, H., & Xu, Z. (2019). Completion Time Minimization for Multi-UAV Information Collection via Trajectory Planning. Sensors, 19(18), 4032. https://doi.org/10.3390/s19184032