Improved Pedestrian Dead Reckoning Based on a Robust Adaptive Kalman Filter for Indoor Inertial Location System

Abstract
:1. Introduction
2. Materials and Methods
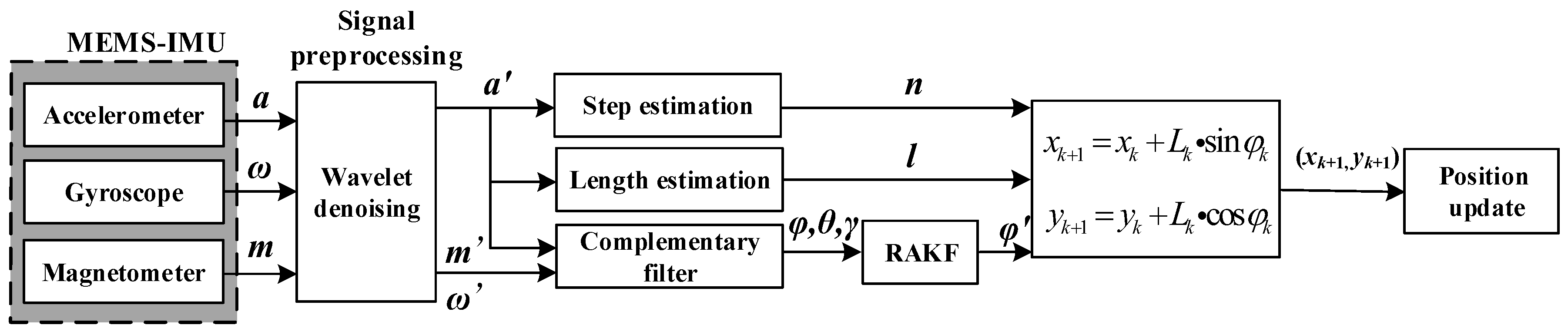
2.1. System Modeling
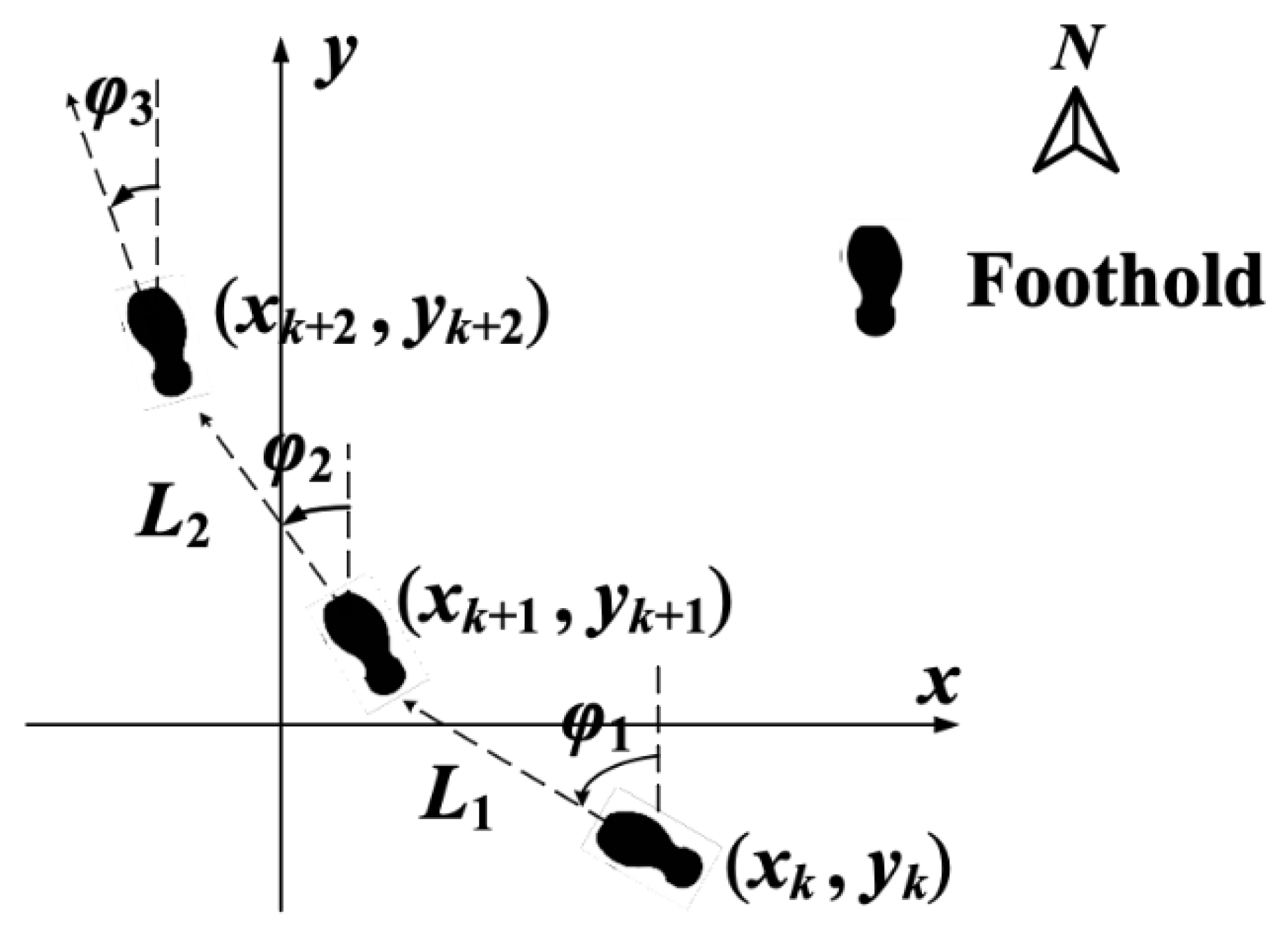
2.1.1. Pedestrian Dead Reckoning
2.1.2. Pedestrian Positioning System Model
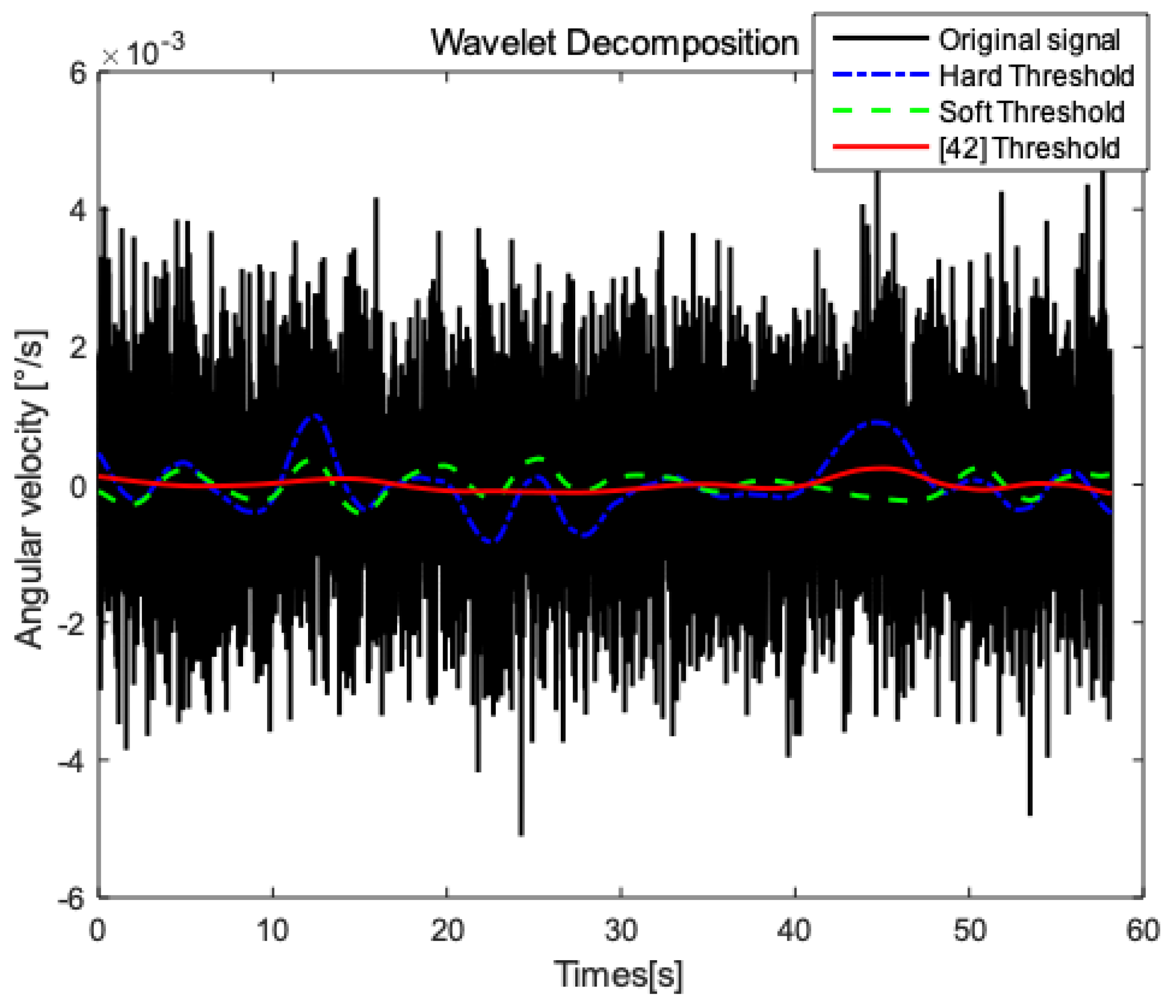
2.2. Signal Preprocessing
- (1)
- Wavelet decomposition of signals containing noise: select the appropriate wavelet base and decomposition layer;
- (2)
- Threshold quantization processing: select appropriate thresholds and threshold functions to process the coefficients of each layer;
- (3)
- Wavelet reconstruction: reconstruct the processed coefficients to obtain the denoised signal.
2.3. Pedestrian Dead Reckoning
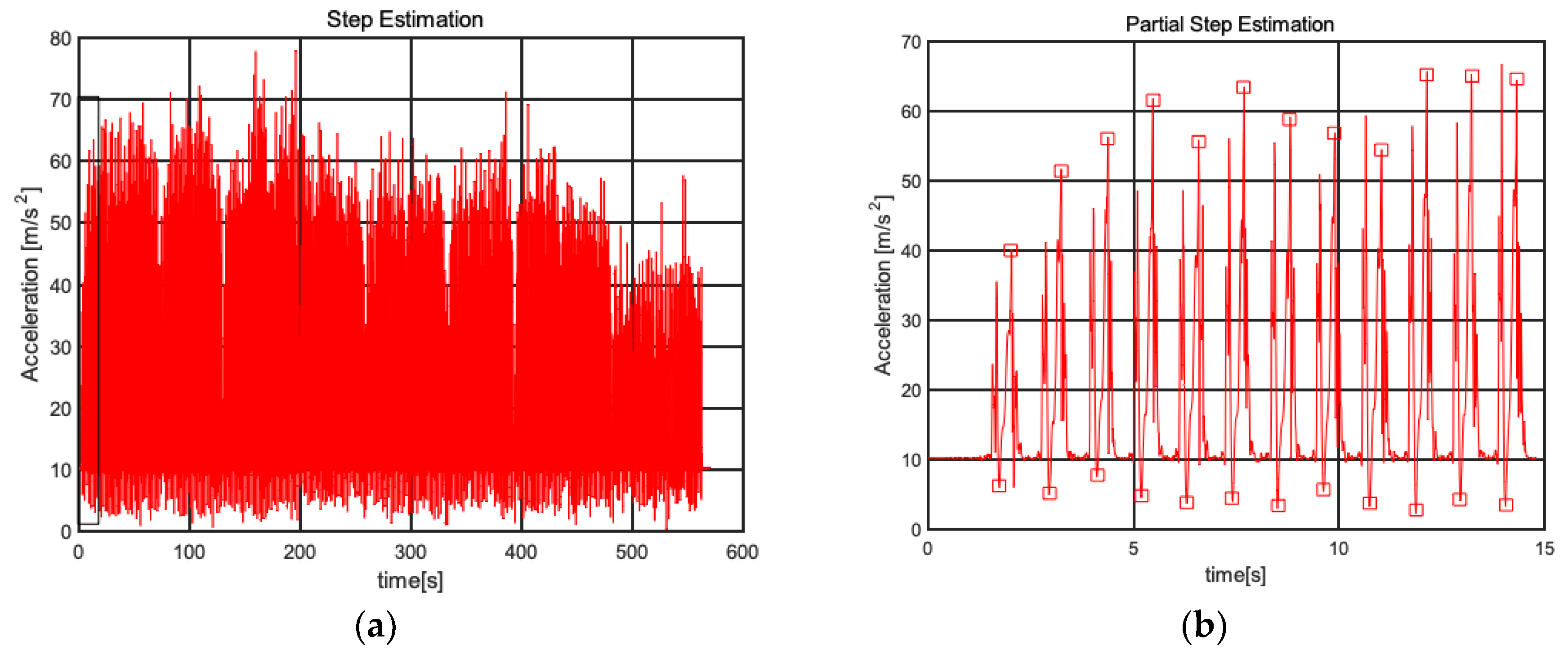
2.3.1. Step Estimation
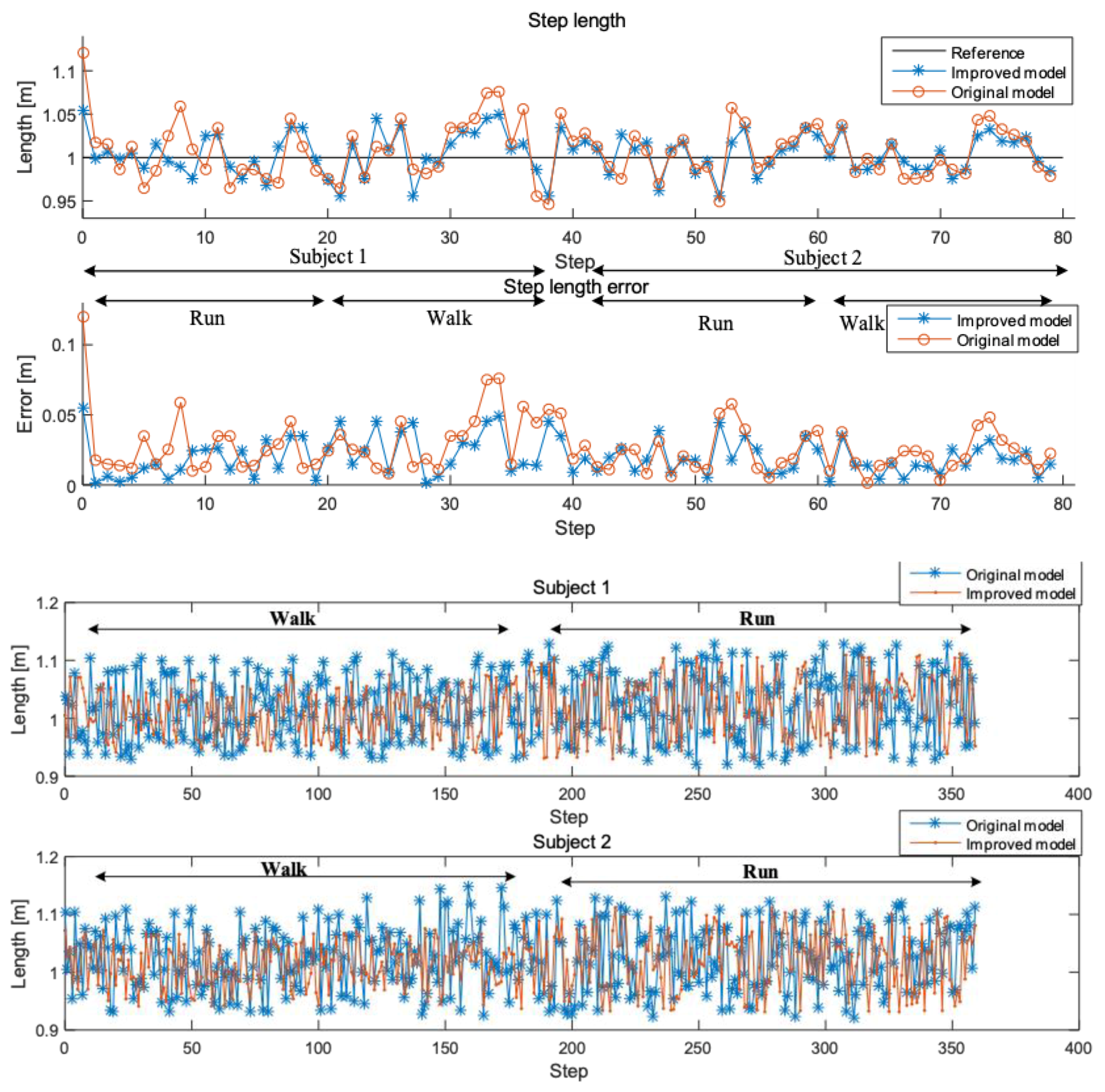
2.3.2. Length Estimation
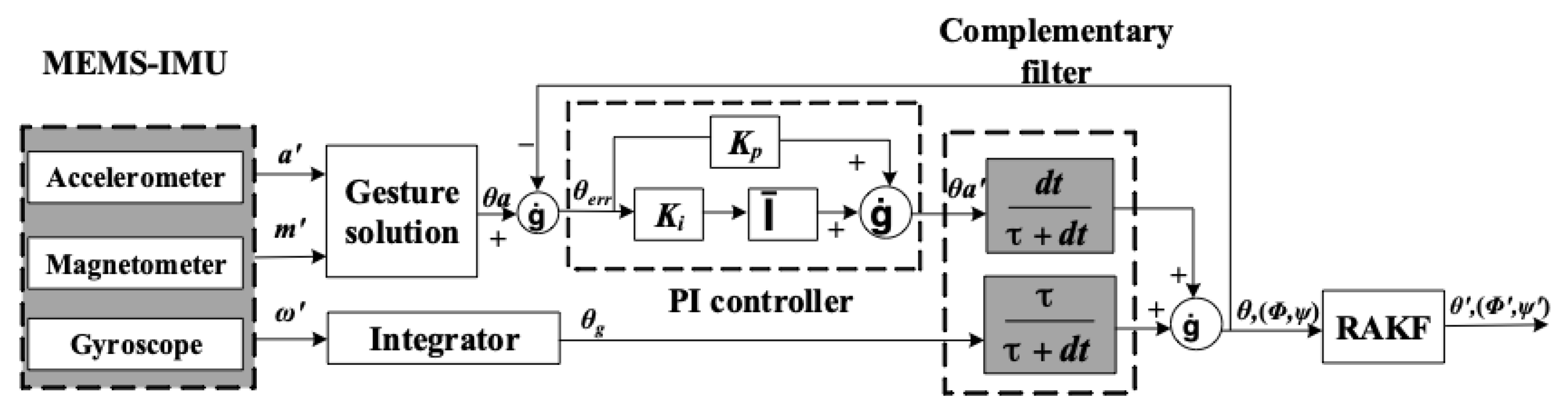
2.3.3. Heading Estimation
3. Results
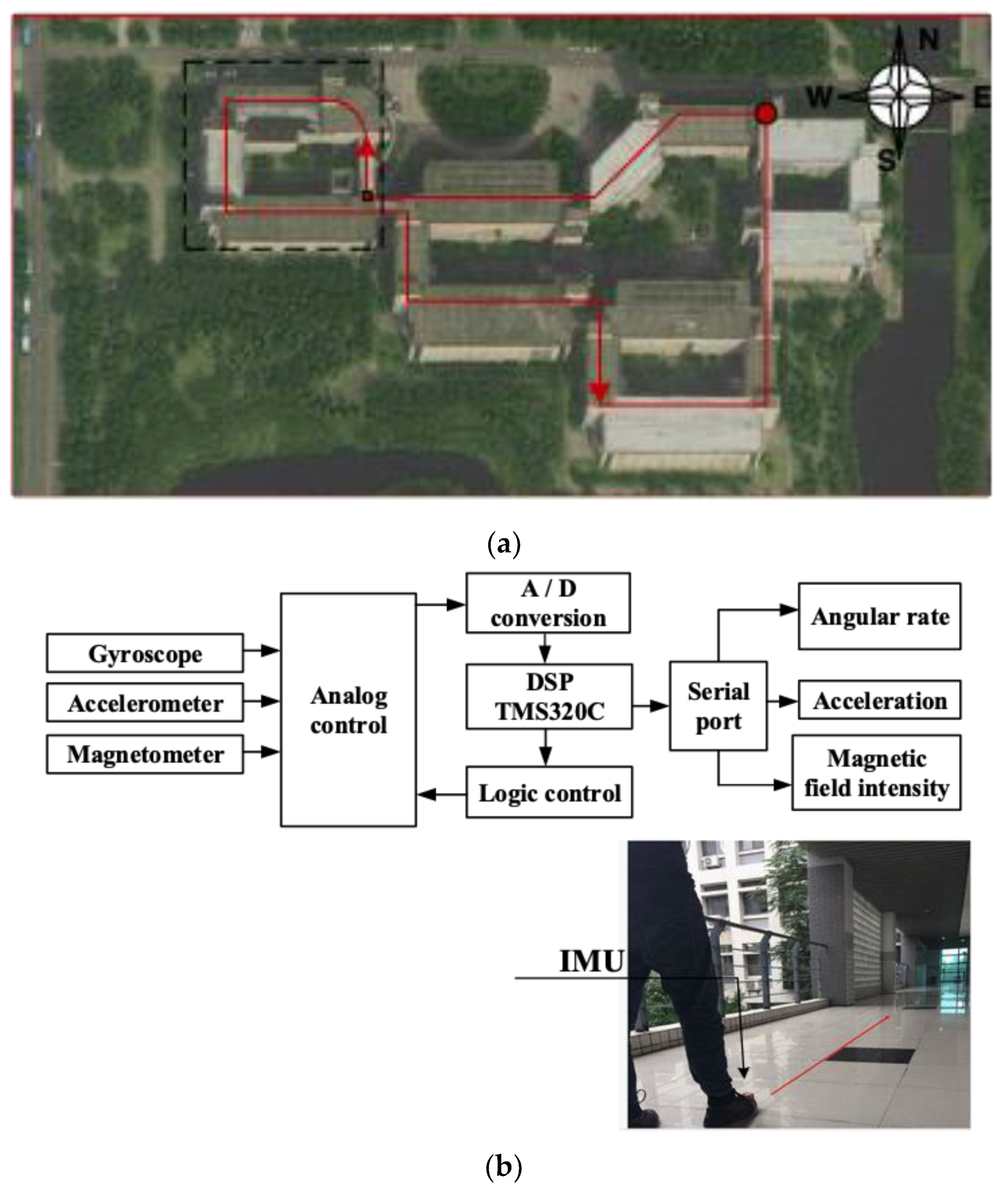
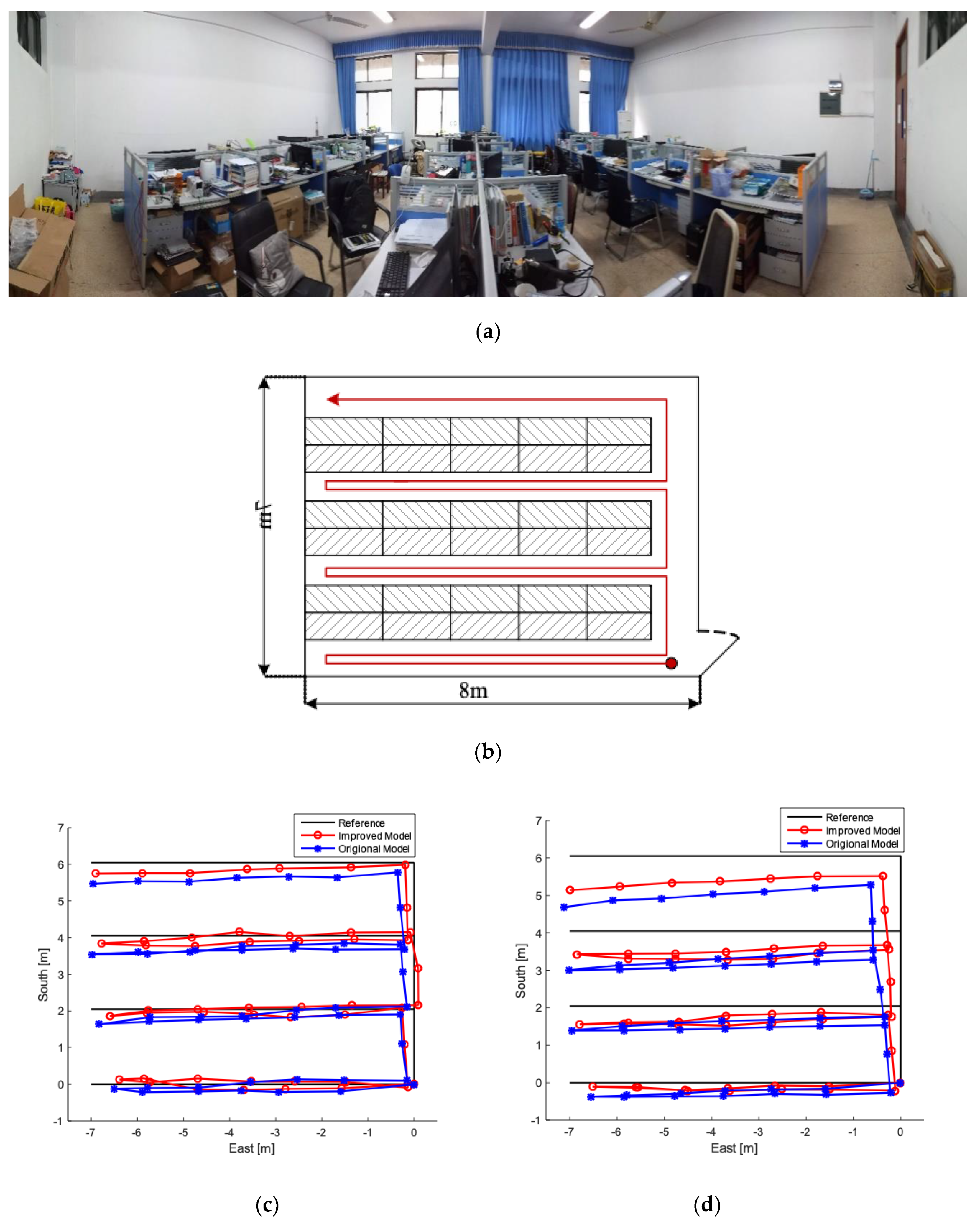
3.1. Laboratory Equipment
3.2. Analysis of Signal Preprocessing
3.3. Analysis of Improved PDR Algorithm
3.3.1. Step Frequency Analysis
3.3.2. Step Length Analysis
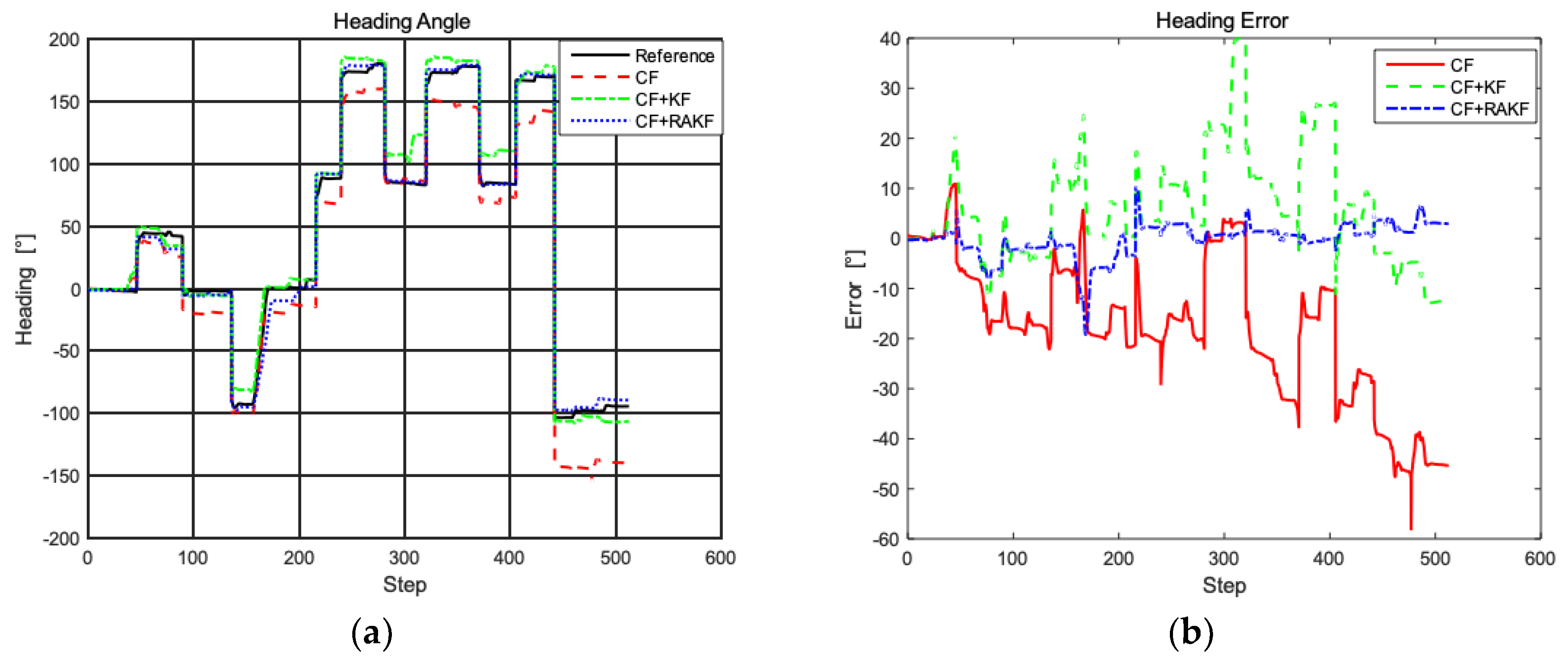
3.3.3. Heading Analysis
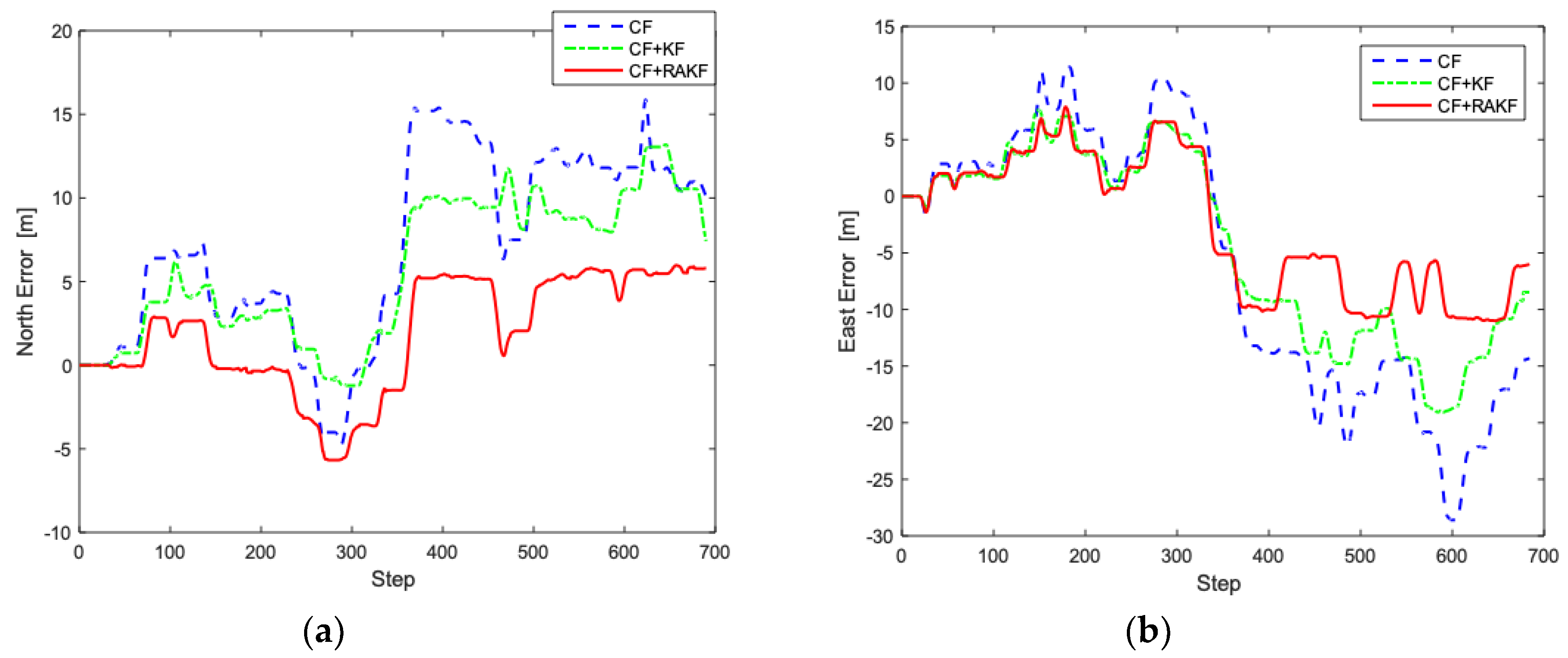
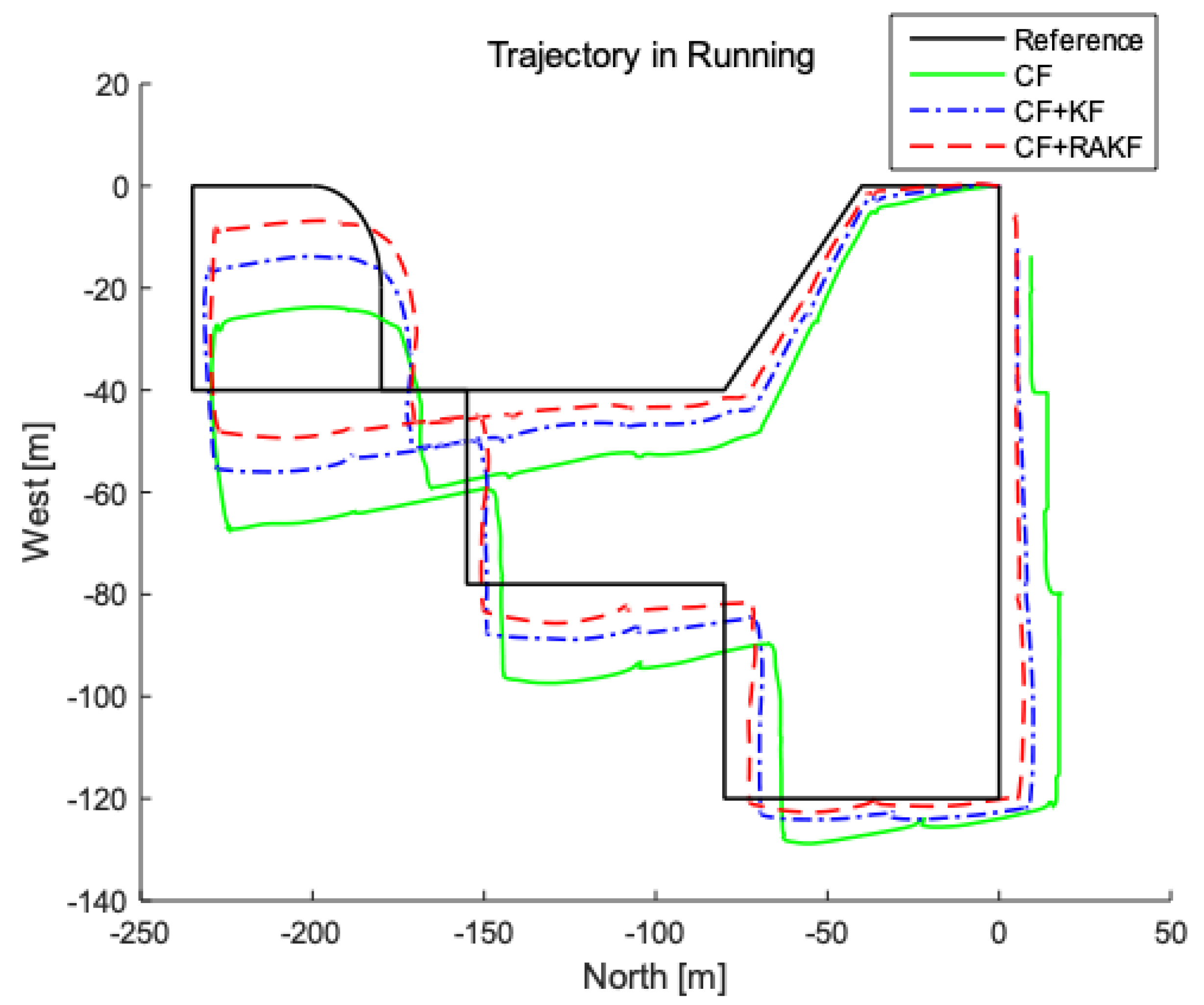
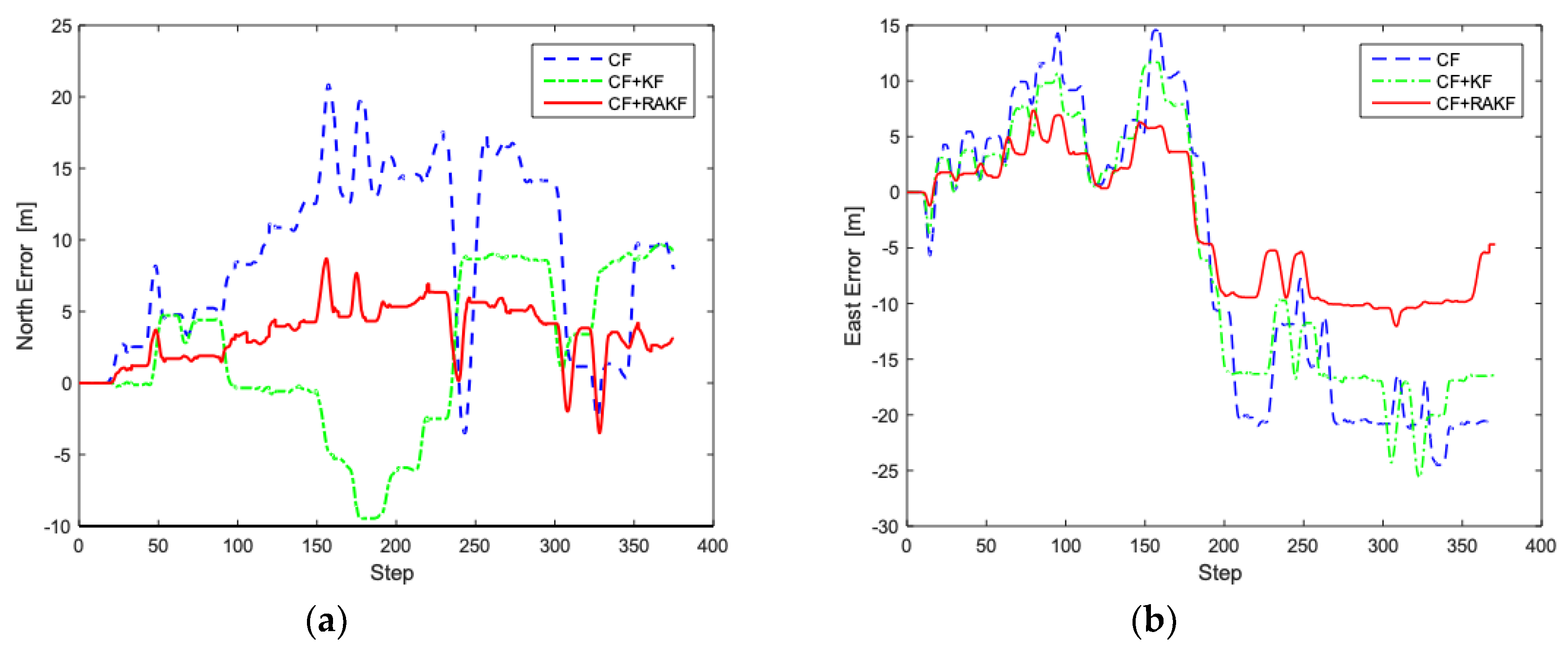
3.3.4. Trajectory Comparison Analysis
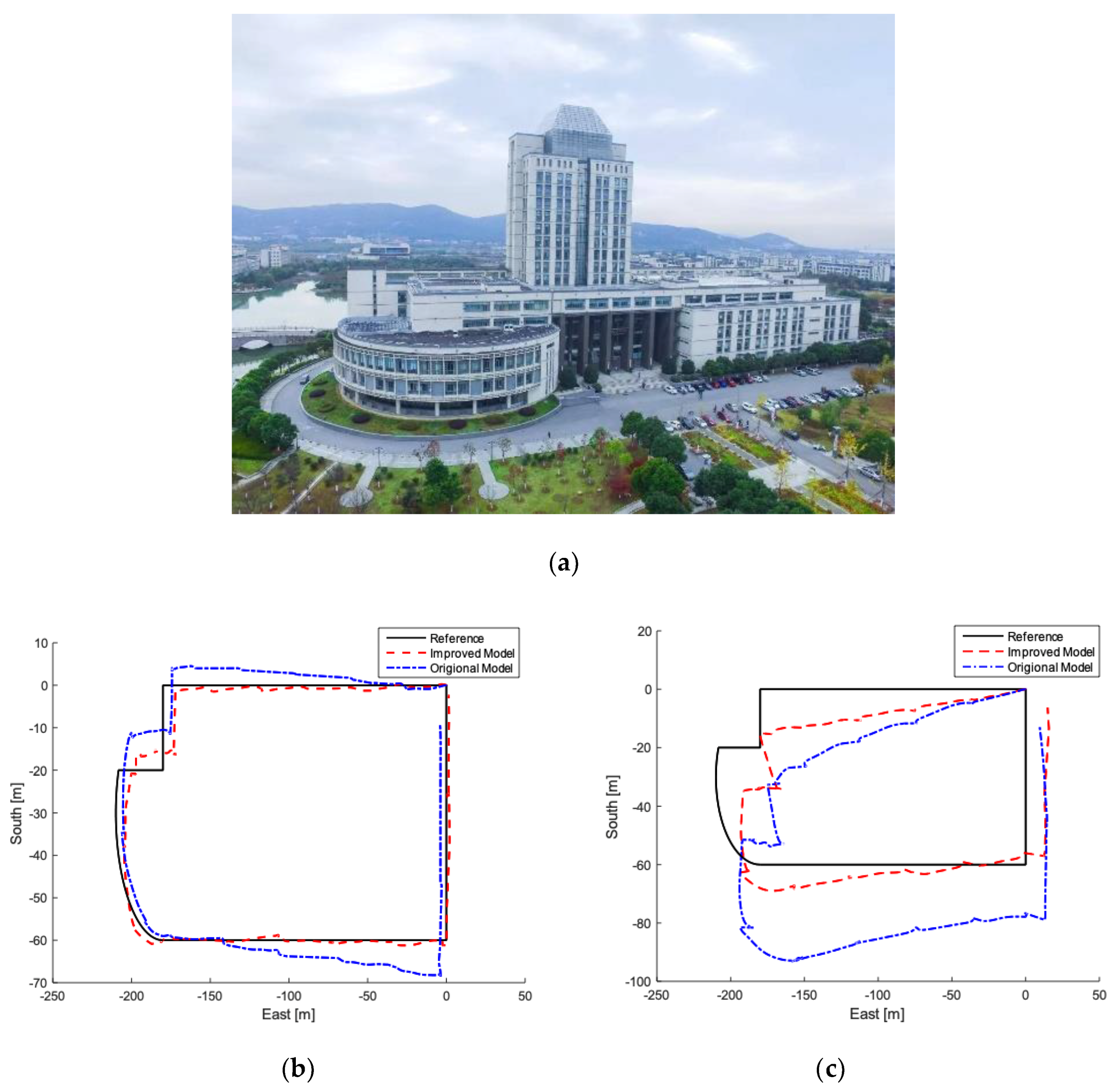
3.4. Additional Experiments
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kim, J.W.; Kim, D.H.; Jang, B. Application of Local Differential Privacy to Collection of Indoor Positioning Data. IEEE Access 2018, 6, 4276–4286. [Google Scholar] [CrossRef]
- Xing, B.; Zhu, Q.; Pan, F.; Feng, X. Marker-Based Multi-Sensor Fusion Indoor Localization System for Micro Air Vehicles. Sensors 2018, 18, 1706. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.; Yu, H.; Zhang, J. Fusion of inertial and visual information for indoor localisation. Electron. Lett. 2018, 54, 850–851. [Google Scholar] [CrossRef]
- Jiang, B.; Wang, K. Algorithm Design of Low Cost Vehicle Integrated Navigation in GPS Failure. J. Transduct. Technol. 2017, 30, 412–417. [Google Scholar]
- Xu, Y.; Shmaliy, Y.S.; Li, Y.; Chen, X. UWB-Based Indoor Human Localization with Time-Delayed Data Using EFIR Filtering. IEEE Access 2017, 5, 16676–16683. [Google Scholar] [CrossRef]
- Alvarez, Y.; Heras, F.L. ZigBee-based Sensor Network for Indoor Location and Tracking Applications. IEEE Lat. Am. Trans. 2016, 14, 3208–3214. [Google Scholar] [CrossRef] [Green Version]
- Tan, J.; Fan, X.; Wang, S.; Ren, Y. Optimization-Based Wi-Fi Radio Map Construction for Indoor Positioning Using Only Smart Phones. Sensors 2018, 18, 3095. [Google Scholar] [CrossRef]
- De Blasio, G.; Quesada-Arencibia, A.; García, C.R.; Rodríguez-Rodríguez, J.C.; Moreno-Díaz, R. A Protocol-Channel-based Indoor Positioning Performance Study for Bluetooth Low Energy. IEEE Access 2018, 6, 33440–33450. [Google Scholar] [CrossRef]
- Ma, Y.; Wang, B.; Pei, S.; Zhang, Y.; Zhang, S.; Yu, J. An Indoor Localization Method Based on AOA and PDOA Using Virtual Stations in Multipath and NLOS Environments for Passive UHF RFID. IEEE Access 2018, 6, 31772–31782. [Google Scholar] [CrossRef]
- Geng, L. Design of Machine Vision Positioning System for Indoor Mobile Robots. Autom. Instrum. 2017, 38, 49–52. [Google Scholar]
- Yang, H.; Li, W.; Zhang, H.; Gu, Y.; Fan, M. Research on fault-tolerant combined positioning technology based on SINS/UWB in complex environment. J. Sci. Instrum. 2017, 9, 2177–2185. [Google Scholar]
- Wang, S. Application Research of ZigBee-based Wireless Sensor Network in Indoor Positioning System; North China Electric Power University: Beijing, China, 2008. [Google Scholar]
- Tian, X.; Chen, J.; Han, Y.; Shang, J.; Li, N. Pedestrian navigation system using MEMS sensors for heading drift and altitude error correction. Sens. Rev. 2017, 37, 270–281. [Google Scholar] [CrossRef]
- Ahmed, H.; Tahir, M. Accurate Attitude Estimation of a Moving Land Vehicle Using Low-Cost MEMS IMU Sensors. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1723–1739. [Google Scholar] [CrossRef]
- Yu, C.; Lan, H.; Gu, F.; Yu, F.; El-Sheimy, N. A Map/INS/Wi-Fi Integrated System for Indoor Location-Based Service Applications. Sensors 2017, 17, 1272. [Google Scholar] [CrossRef] [PubMed]
- Chiang, K.W.; Liao, J.K.; Tsai, G.J.; Chang, H.W. The Performance Analysis of the Map-Aided Fuzzy Decision Tree Based on the Pedestrian Dead Reckoning Algorithm in an Indoor Environment. Sensors 2016, 16, 34. [Google Scholar] [CrossRef] [PubMed]
- Zampella, F.; De Angelis, A.; Skog, I.; Zachariah, D.; Jimenez, A. A constraint approach for UWB and PDR fusion. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation 2012, Sydney, Australia, 13–15 November 2012; IEEE: Piscataway, NJ, USA, 2012. [Google Scholar]
- Xu, Q.; Li, X.; Chan, C.Y. Enhancing Localization Accuracy of MEMS-INS/GPS/In-Vehicle Sensors Integration During GPS Outages. IEEE Trans. Instrum. Meas. 2018, 67, 1966–1978. [Google Scholar] [CrossRef]
- Jiang, W.; Li, Y.; Rizos, C.; Cai, B.; Shangguan, W. Seamless Indoor-Outdoor Navigation based on GNSS, INS and Terrestrial Ranging Techniques. J. Navig. 2017, 70, 1183–1204. [Google Scholar] [CrossRef]
- Ai, M.; Shi, W. Indoor Positioning Technology Based on Low Cost INS/RFID. J. Comput. Meas. Control 2016, 24, 122–125. [Google Scholar]
- Fan, Q.; Sun, B.; Sun, Y.; Wu, Y.; Zhuang, X. Data Fusion for Indoor Mobile Robot Positioning Based on Tightly Coupled INS/UWB. J. Navig. 2017, 70, 1079–1097. [Google Scholar] [CrossRef]
- Hsu, L.T.; Gu, Y.; Huang, Y.; Kamijo, S. Urban Pedestrian Navigation Using Smartphone-Based Dead Reckoning and 3-D Map-Aided GNSS. IEEE Sens. J. 2016, 16, 1281–1293. [Google Scholar] [CrossRef]
- Liu, J.; Shen, Q.; Li, C.; Qing, W. Signal fusion method based on optimized KF for MEMS gyro array. Syst. Eng. Electron. 2016, 38, 2705–2710. [Google Scholar]
- Deng, Z.A.; Wang, G.; Hu, Y.; Wu, D. Heading Estimation for Indoor Pedestrian Navigation Using a Smartphone in the Pocket. Sensors 2015, 15, 21518–21536. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jin, Y.; Toh, H.S.; Soh, W.S.; Wong, W.C. A robust dead-reckoning pedestrian tracking system with low cost sensors. In Proceedings of the 2011 IEEE International Conference on Pervasive Computing and Communications, Seattle, WA, USA, 21–25 March 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 222–230. [Google Scholar]
- Martinelli, A.; Gao, H.; Groves, P.D.; Morosi, S. Probabilistic Context-aware Step Length Estimation for Pedestrian Dead Reckoning. IEEE Sens. J. 2017, 18, 1600–1611. [Google Scholar] [CrossRef]
- Khalifa, S.; Hassan, M.; Seneviratne, A. Adaptive pedestrian activity classification for indoor dead reckoning systems. In Proceedings of the 2013 International Conference on Indoor Positioning and Indoor Navigation, Montbeliard-Belfort, France, 28–31 October 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–7. [Google Scholar]
- del Rosario, M.B.; Redmond, S.J.; Lovell, N.H. Tracking the Evolution of Smartphone Sensing for Monitoring Human Movement. Sensors 2015, 15, 18901–18933. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, Y.; Ren, M.; Wang, P.; Guo, H. Indoor Pedestrian Map Assisted Location Method Based on Track Estimation. J. Surv. Map. Sci. Technol. 2017, 34, 451–454. [Google Scholar]
- Judd, T.; Levi, R. Dead Reckoning Navigational System Using Accelerometer to Measure Foot Impacts. U.S. Patent 5,583,776, 10 December 1996. [Google Scholar]
- Sun, W.; Wang, F.; Wang, Y.; Yang, Y. Design of indoor inertial positioning system for Android mobile terminal. J. Navig. Pos. 2018, 6, 91–96. [Google Scholar]
- Zhao, X.; Hu, A.; Zhao, W. Indoor positioning system for Bluetooth and map-assisted pedestrian dead reckoning. J. Surv. Mapp. 2016, 41, 53–58. [Google Scholar]
- Li, S.; Cai, C.; Wang, Y.; Qiu, X.; Huang, Y. Mobile phone indoor positioning system based on geomagnetic fingerprinting and PDR fusion. J. Transduct. Technol. 2018, 31, 36–42. [Google Scholar]
- Xu, L.; Zheng, Z.; Sun, L.; Huo, M. Multi-sensor fusion PDR localization method based on neural network. J. Transduct. Technol. 2018, 31, 579–587. [Google Scholar]
- Zhang, T.; Chen, L.; Yan, Y. Underwater Positioning Algorithm Based on1 SINS/LBL Integrated System. IEEE Access 2018, 6, 7157–7163. [Google Scholar] [CrossRef]
- Abbasi-Kesbi, R.; Nikfarjam, A. A Miniature Sensor System for Precise Hand Position Monitoring. IEEE Sens. J. 2018, 18, 2577–2584. [Google Scholar] [CrossRef]
- Hsu, Y.L.; Wang, J.S.; Chang, C.W. A Wearable Inertial Pedestrian Navigation System with Quaternion-Based Extended Kalman Filter for Pedestrian Localization. IEEE Sens. J. 2017, 17, 3193–3206. [Google Scholar] [CrossRef]
- Ibarra-Bonilla, M.N.; Escamilla-Ambrosio, P.J.; Ramirez-Cortes, J.M.; Vianchada, C. Pedestrian dead reckoning with attitude estimation using a fuzzy logic tuned adaptive kalman filter. In Proceedings of the 2013 IEEE Fourth Latin American Symposium on Circuits and Systems (LASCAS), Cusco, Peru, 27 February–1 March 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–4. [Google Scholar]
- Hu, F.; Lü, T.; Bao, Y. Application of improved adaptive Kalman filtering in SINS/GPS integrated navigation. Comput. Eng. Appl. 2018, 54, 253–257. [Google Scholar]
- Zhang, H.; Zhu, J.; Huang, Z. Research on Improved Adaptive Complementary Filtering Algorithm Based on AHRS. Res. Prog. Solid State Electron. 2018, 37, 157–160. [Google Scholar]
- Sun, W.; Wen, J.; Zhang, Y.; Geng, S. Identification and Noise Reduction Method of MEMS Gyroscope Random Error. J. Electron. Meas. Instrum. 2017, 31, 15–20. [Google Scholar]
- Li, S.; Zhou, Y.; Zhou, Y. Application of Adaptive Wavelet Threshold Denoising Algorithm in Low-altitude Flight Acoustic Target. J. Vib. Shock 2017, 36, 153–158. [Google Scholar]
- Wang, Y.; Cai, C.; Li, S.; Yu, H. Research on indoor positioning algorithm based on pedestrian trajectory estimation. Electron. Technol. Appl. 2017, 43, 86–89. [Google Scholar]
- Sun, J.; You, Y.; Fu, Z. Attitude Solution Method Based on Adaptive Explicit Complementary Filtering. Meas. Control Technol. 2015, 34, 24–27. [Google Scholar]
- Sun, J.; Xu, X.; Liu, Y.; Zhang, T.; Li, Y. FOG random drift signal denoising based on the improved AR model and modified Sage-Husa adaptive Kalman filter. Sensors 2016, 16, 1073. [Google Scholar] [CrossRef] [PubMed]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RD [m] | Original Model | Improved Model | |||
|---|---|---|---|---|---|
| SD [m] | MAE [m] | SD [m] | MAE [m] | ||
| Run-1 | 181.0 | 195.1 | 0.13 | 189.3 | 0.08 |
| Walk-1 | 181.0 | 174.3 | 0.09 | 175.6 | 0.07 |
| Run-2 | 181.0 | 200.9 | 0.15 | 191.5 | 0.11 |
| Walk-2 | 181.0 | 207.5 | 0.18 | 187.1 | 0.12 |
| CF | CF + KF | CF + RAKF | ||||
|---|---|---|---|---|---|---|
| North | East | North | East | North | East | |
| Error Range [m] | −4.8–15.1 | −27.5–12.3 | −2.7–14.6 | −16.3–6.7 | −5.2–5.1 | −9.8–6.3 |
| MAE [m] | 10.7 | 14.7 | 8.1 | 9.4 | 3.8 | 5.3 |
| CF | CF + KF | CF + RAKF | ||||
|---|---|---|---|---|---|---|
| North | East | North | East | North | East | |
| Error Range [m] | −4.7–21.3 | −25.1–12.6 | −8.5–10.3 | −25.3–11.2 | −4.6–8.0 | −12.9–7.4 |
| MAE [m] | 11.3 | 16.9 | 8.3 | 13.2 | 4.7 | 7.2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, Q.; Zhang, H.; Pan, P.; Zhuang, X.; Jia, J.; Zhang, P.; Zhao, Z.; Zhu, G.; Tang, Y. Improved Pedestrian Dead Reckoning Based on a Robust Adaptive Kalman Filter for Indoor Inertial Location System. Sensors 2019, 19, 294. https://doi.org/10.3390/s19020294
Fan Q, Zhang H, Pan P, Zhuang X, Jia J, Zhang P, Zhao Z, Zhu G, Tang Y. Improved Pedestrian Dead Reckoning Based on a Robust Adaptive Kalman Filter for Indoor Inertial Location System. Sensors. 2019; 19(2):294. https://doi.org/10.3390/s19020294
Chicago/Turabian StyleFan, Qigao, Hai Zhang, Peng Pan, Xiangpeng Zhuang, Jie Jia, Pengsong Zhang, Zhengqing Zhao, Gaowen Zhu, and Yuanyuan Tang. 2019. "Improved Pedestrian Dead Reckoning Based on a Robust Adaptive Kalman Filter for Indoor Inertial Location System" Sensors 19, no. 2: 294. https://doi.org/10.3390/s19020294
APA StyleFan, Q., Zhang, H., Pan, P., Zhuang, X., Jia, J., Zhang, P., Zhao, Z., Zhu, G., & Tang, Y. (2019). Improved Pedestrian Dead Reckoning Based on a Robust Adaptive Kalman Filter for Indoor Inertial Location System. Sensors, 19(2), 294. https://doi.org/10.3390/s19020294