Wireless Fingerprinting Uncertainty Prediction Based on Machine Learning

 and
and 
Abstract
:1. Introduction
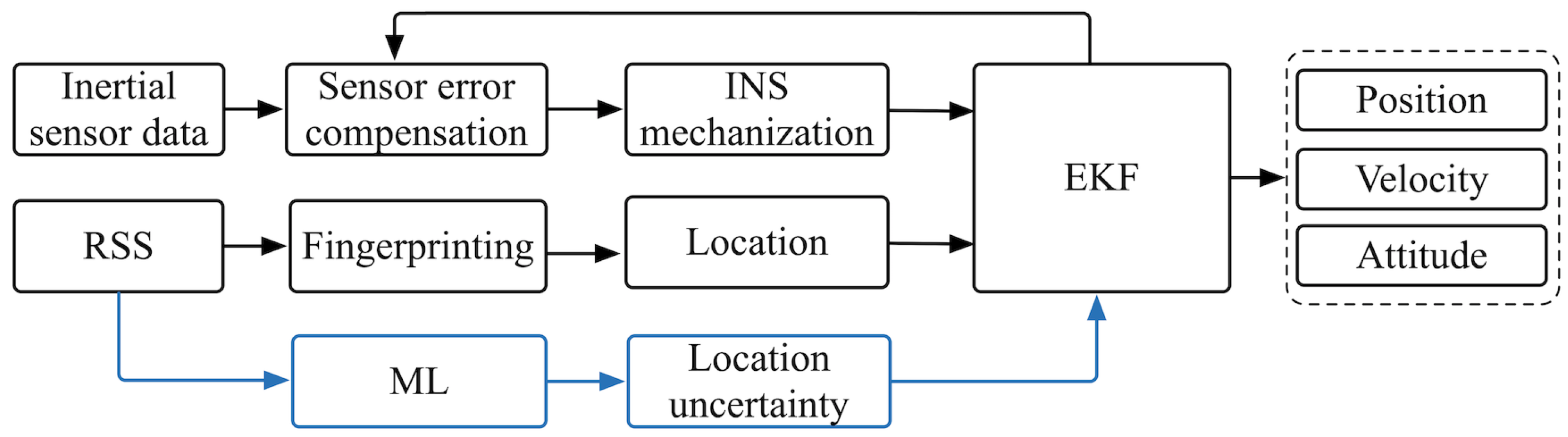
- Method #1: Integration with inertial sensors. The dead-reckoning (DR) solutions from inertial sensors are used to enhance the continuity and robustness of localization.
- Method #2: Setting the wireless localization uncertainty adaptively in data fusion. To achieve this objective, machine learning (ML) methods are used to predict the wireless localization uncertainty, which is further used to set the weight of wireless position updates.
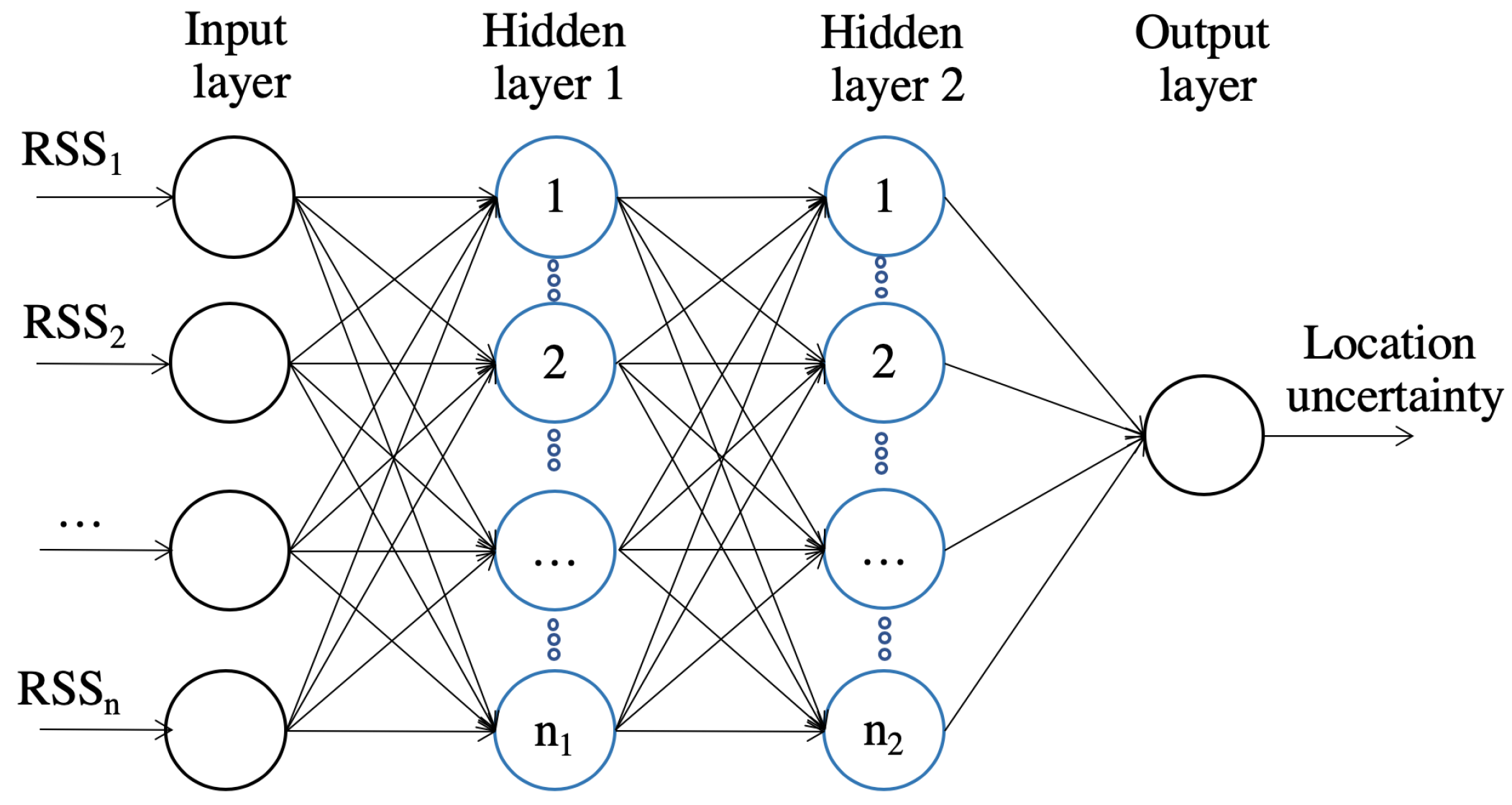
- Although wireless fingerprinting has been widely used for indoor localization, its performance is difficult to quantify. Thus, this paper predicts fingerprinting-based location uncertainty by given RSS measurements. Two ML methods, including an ANN-based method and the GD-based method, are applied.
- Compared to the existing ML works, this paper uses ML from a new perspective. Specifically, instead of directly estimating the location or navigation states, this paper uses ML to learn and predict the relation between RSS and localization uncertainty. The ML-predicted location uncertainty is further used to set the measurement noises in the dead-reckoning/wireless fingerprinting integrated localization extended Kalman filter (EKF).
2. Methodology
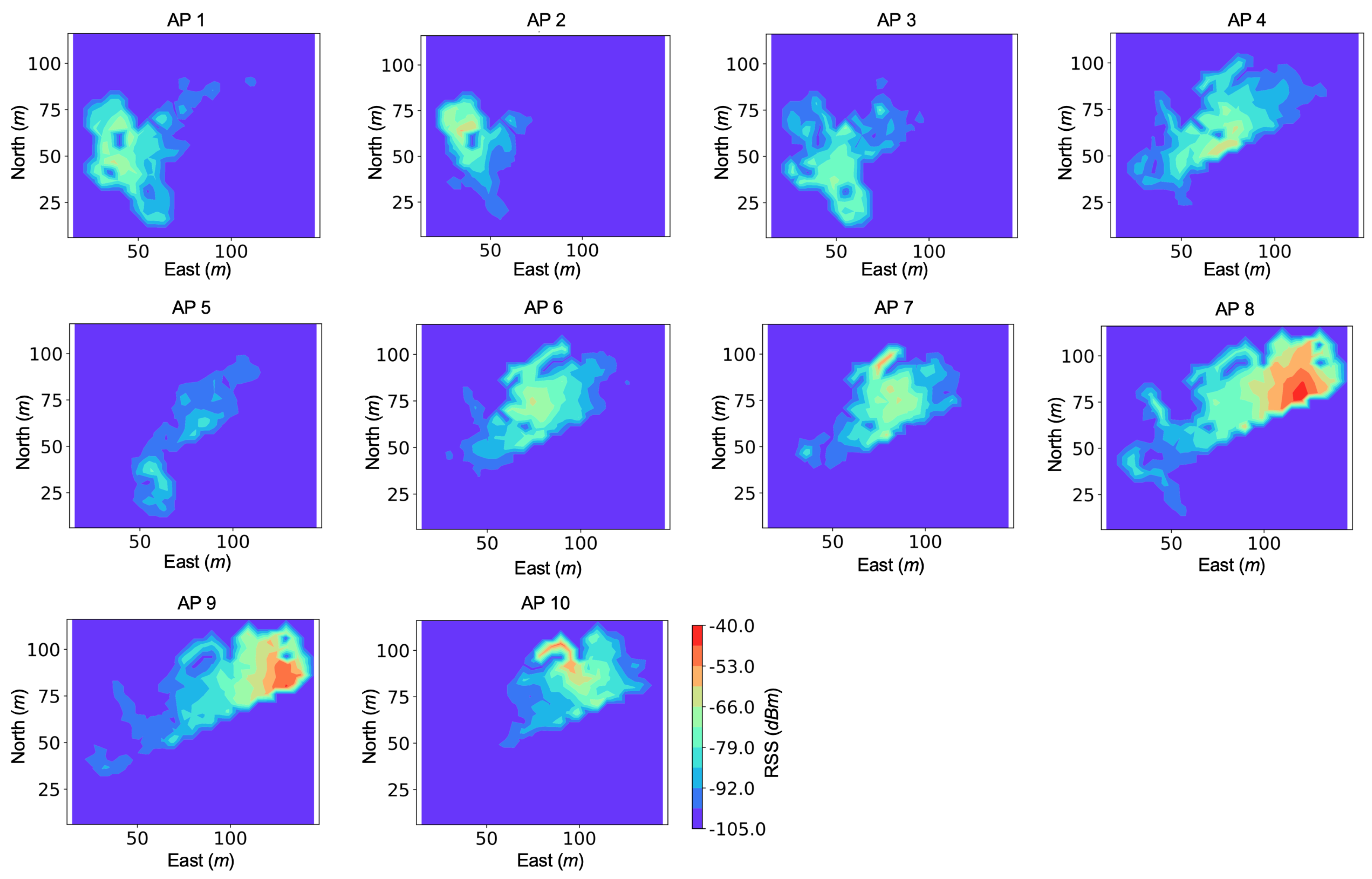
2.1. Wireless Fingerprinting
2.2. Artificial Neural Network
2.3. Wireless/Dead-Reckoning Integrated Localization
3. Tests and Results
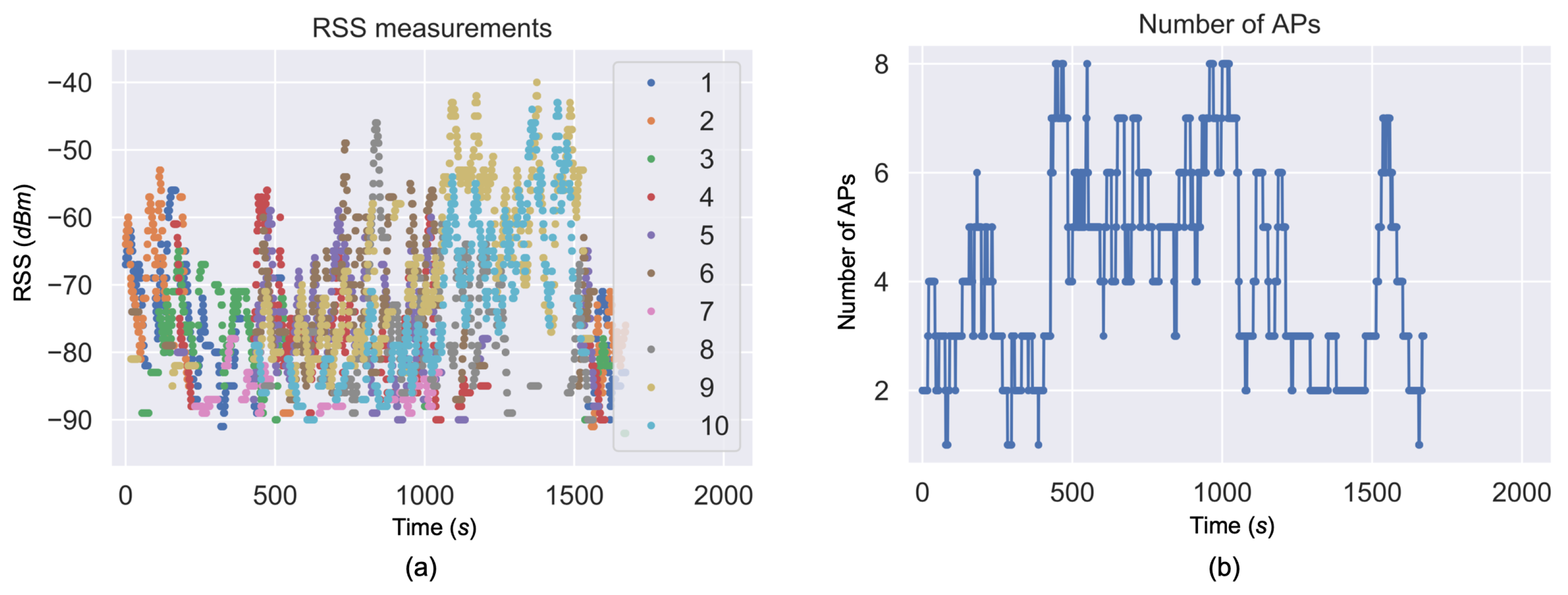
3.1. Test Description
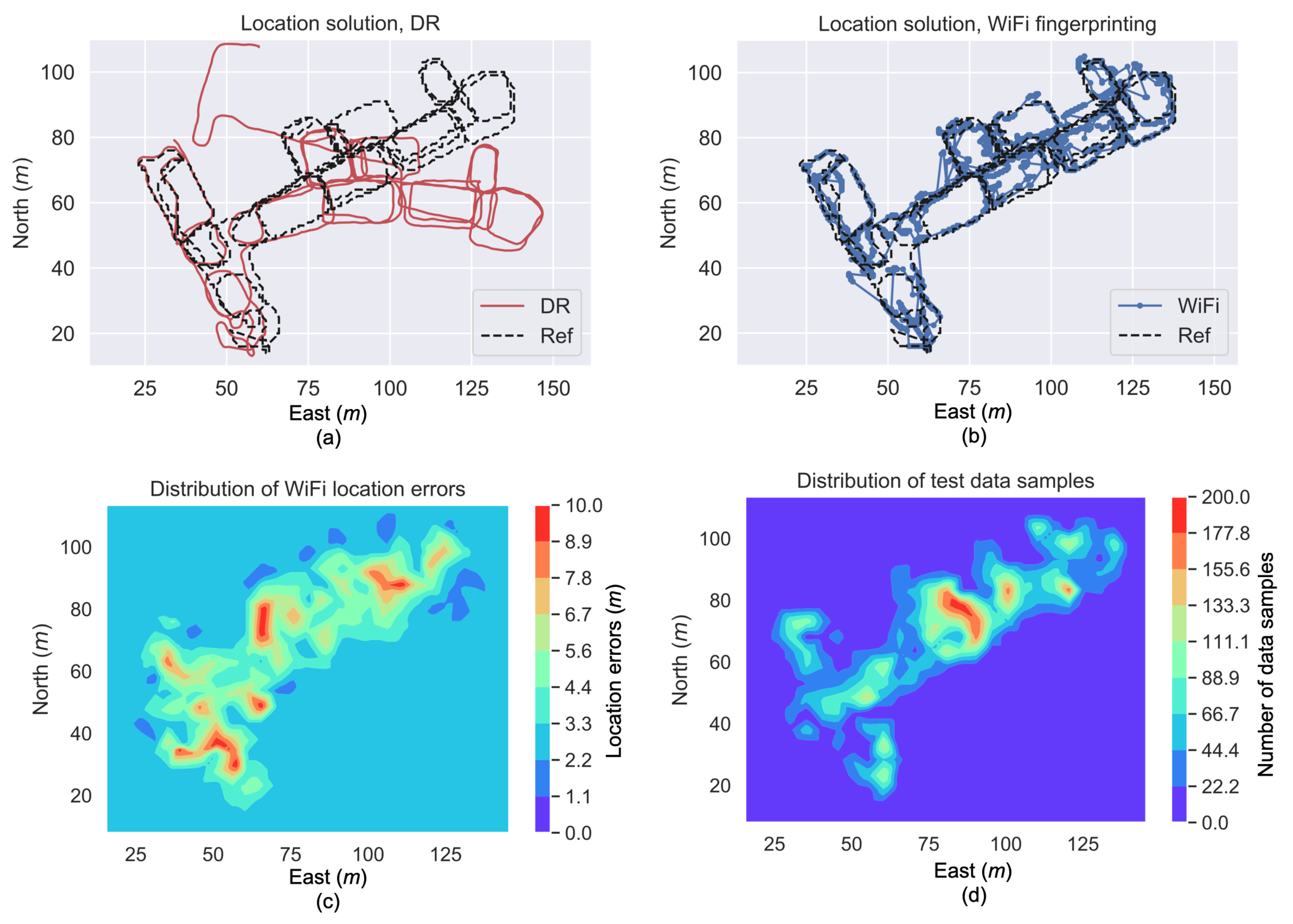
3.2. DR and WiFi Fingerprinting Solutions
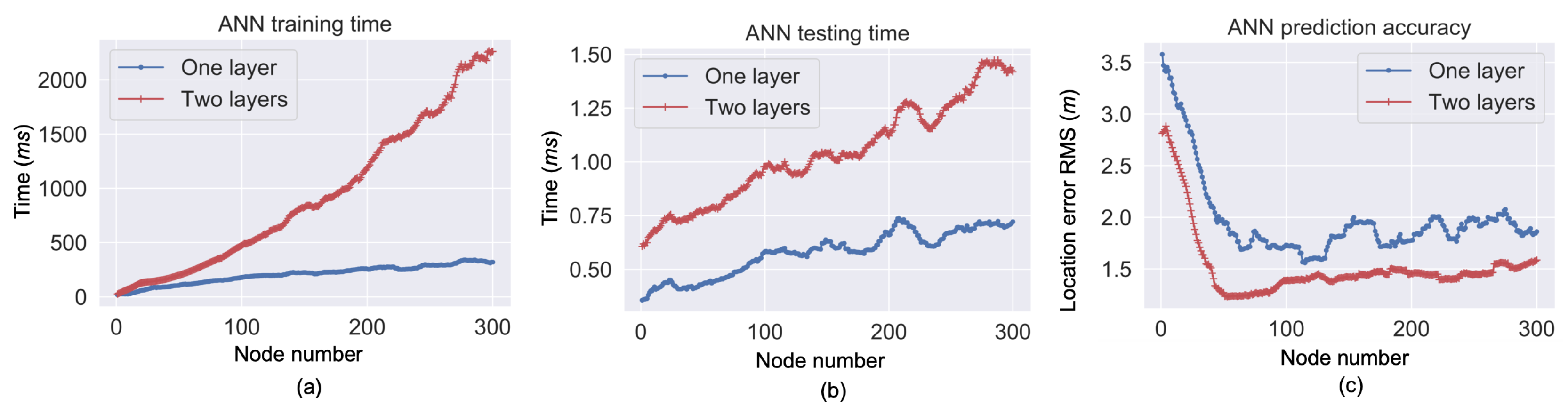
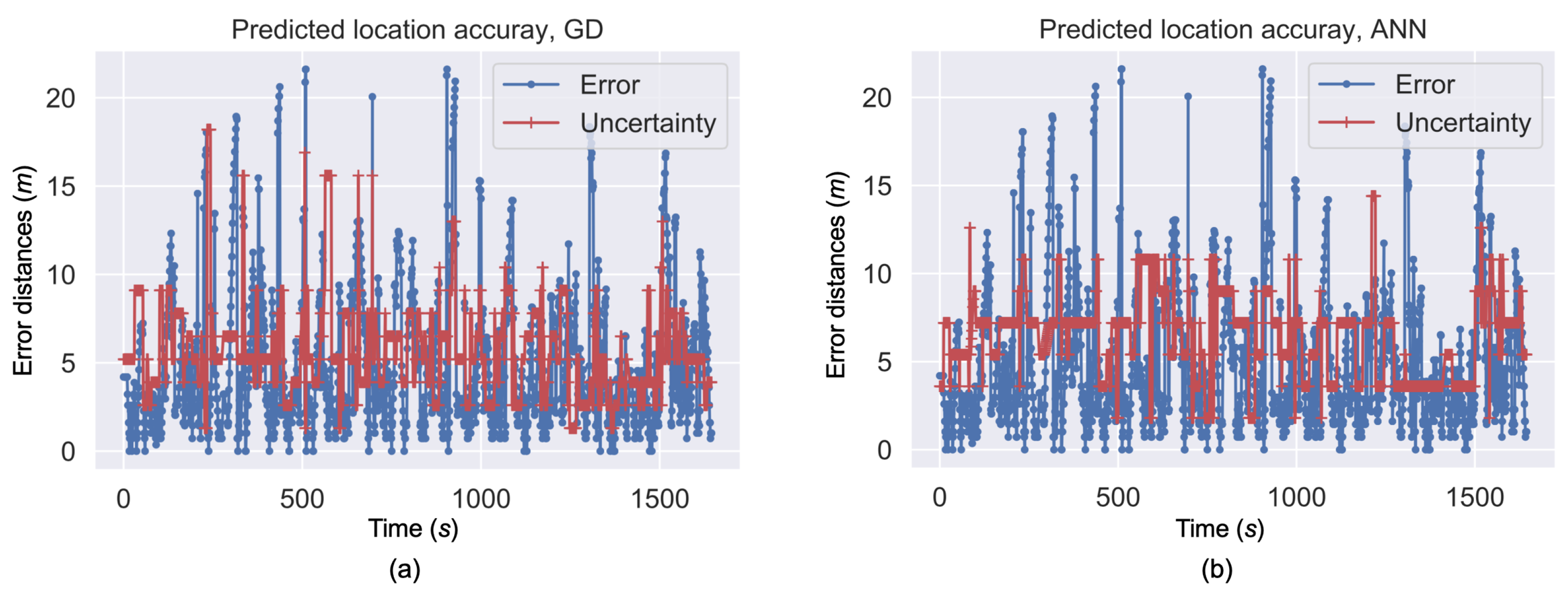
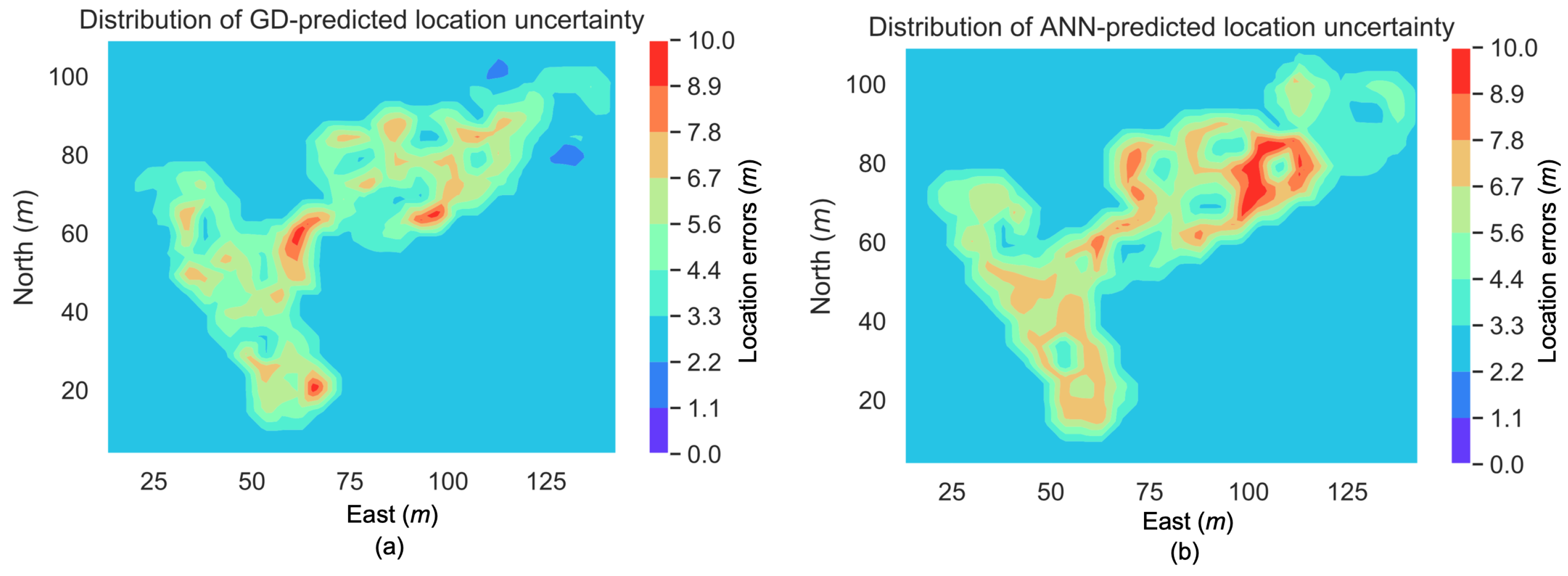
3.3. ANN Training and Prediction
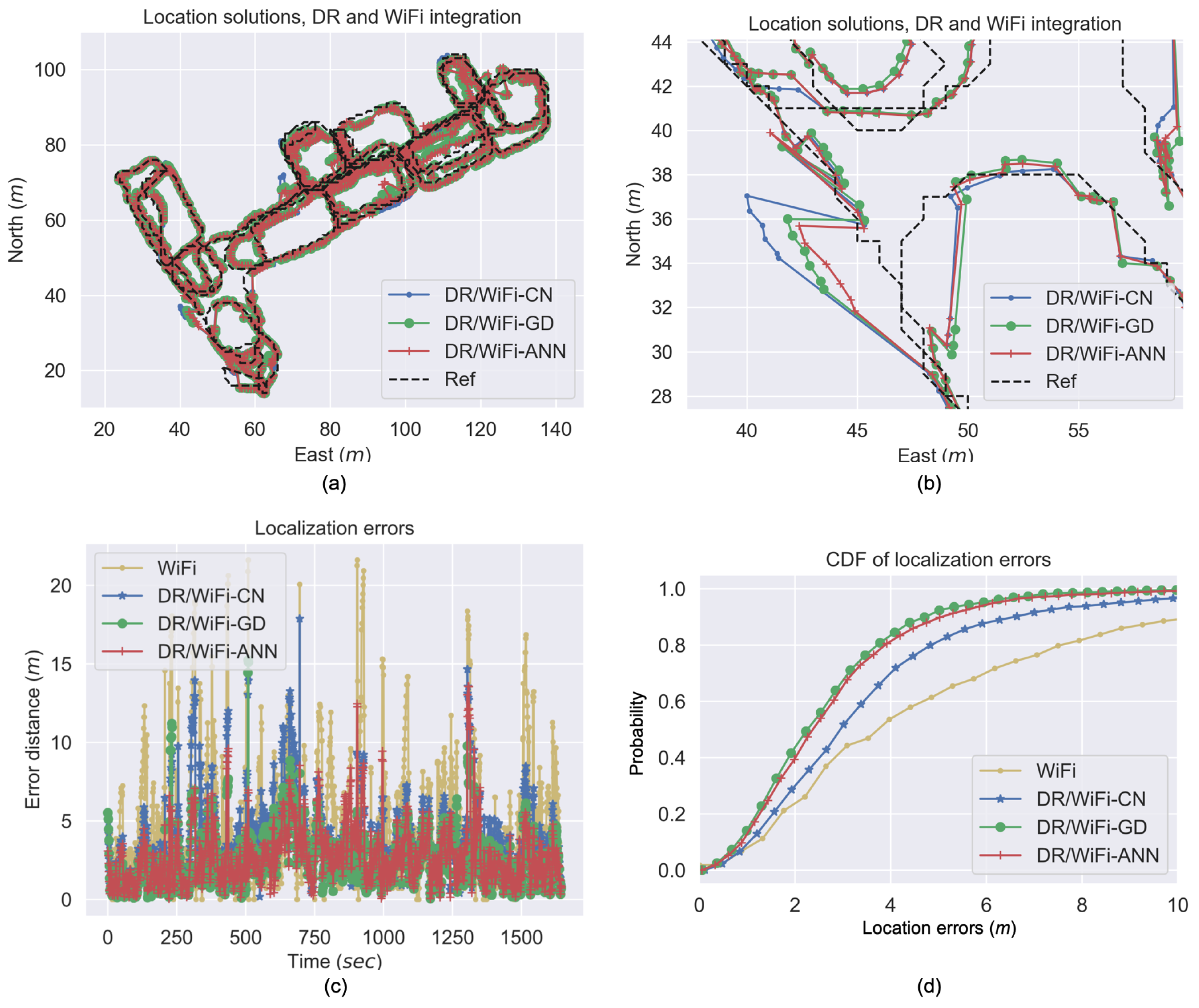
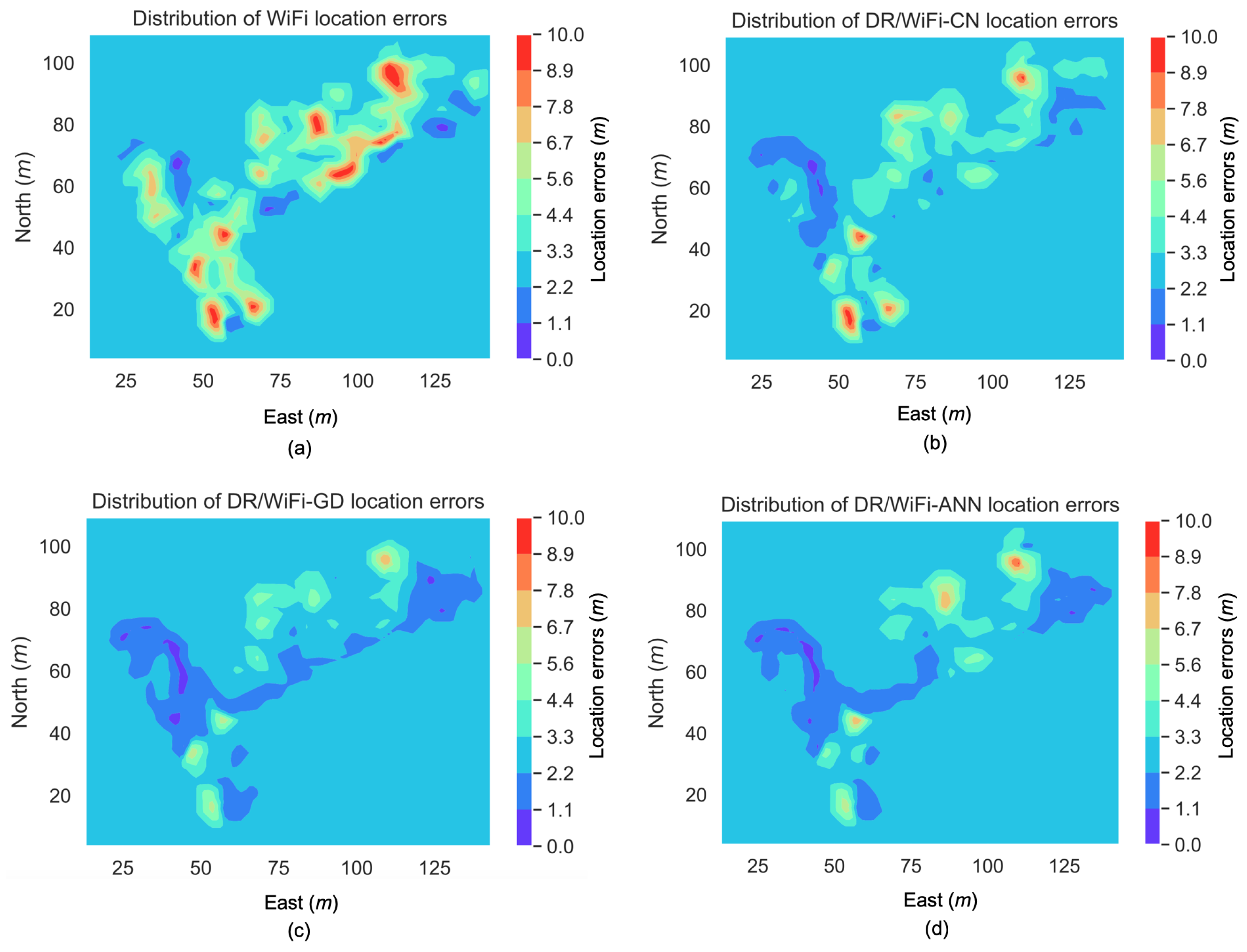
3.4. Localization with ML-Predicted Location Uncertainty
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ANFIS | adaptive neural fuzzy inference system |
| ANN | artificial neural network |
| AoA | angle-of-arrival |
| AP | access point |
| BDS | BeiDou navigation satellite system |
| BLE | bluetooth low energy |
| BP | back-propagation |
| CNN | convolution neural network |
| CPN | counter propagation neural network |
| DOP | dilution of precision |
| DR | dead-reckoning |
| EKF | extended Kalman filter |
| FF | feed-forward neural network |
| GAN | generative adversarial neural network |
| GCC | generalized cross correlation |
| GD | gaussian distribution |
| GNSS | global navigation satellite systems |
| GPS | global positioning services |
| INS | inertial navigation system |
| L-BFGS | limited-memory Broyden–Fletcher–Goldfarb–Shanno |
| LPWAN | low-power wide-area network |
| ML | machine learning |
| MLP | multi-layer perceptron |
| N/A | not provided |
| NLoS | non-line-of-sight |
| RBF | radial basis function neural network |
| RBP | resilient back propagation |
| RFID | radio frequency identification |
| RGB-D | red-green-blue-depth |
| RMS | root mean squares |
| RNN | recurrent neural network |
| RP | reference point |
| RSS | received signal strength |
| SCG | scaled conjugate gradient |
| SLAM | simultaneous localization and mapping |
| SoO | signal of opportunity |
| STD | standard deviation |
| TDNN | time delay neural network |
| ToA | time-of-arrival |
| UTC | coordinated universal time |
| UWB | ultra-wide-band |
| WiFi | wireless local area network |
References
- Ferreira, A.G.; Fernandes, D.; Catarino, A.P.; Monteiro, J.L. Performance Analysis of ToA-Based Positioning Algorithms for Static and Dynamic Targets with Low Ranging Measurements. Sensors 2017, 17, 1915. [Google Scholar] [CrossRef]
- Tomic, S.; Beko, M.; Dinis, R.; Bernardo, L. On Target Localization Using Combined RSS and AoA Measurements. Sensors 2018, 18, 1266. [Google Scholar] [CrossRef] [PubMed]
- Kanaris, L.; Kokkinis, A.; Liotta, A.; Stavrou, S. Fusing Bluetooth Beacon Data with Wi-Fi Radiomaps for Improved Indoor Localization. Sensors 2017, 17, 812. [Google Scholar] [CrossRef] [PubMed]
- Lashkari, B.; Rezazadeh, J.; Farahbakhsh, R.; Sandrasegaran, K. Crowdsourcing and Sensing for Indoor Localization in IoT—A Review. IEEE Sens. J. 2018. [Google Scholar] [CrossRef]
- Gao, C.; Harle, R. Semi-Automated Signal Surveying Using Smartphones and Floorplans. IEEE Trans. Mob. Comput. 2018, 17, 1952–1965. [Google Scholar] [CrossRef] [Green Version]
- Pei, L.; Liu, D.; Zou, D.; Choy, R.L.F.; Chen, Y.; He, Z. Optimal Heading Estimation Based Multidimensional Particle Filter for Pedestrian Indoor Positioning. IEEE Access 2018, 6, 49705–49720. [Google Scholar] [CrossRef]
- Li, Y.; Gao, Z.; He, Z.; Zhang, P.; Chen, R.; El-Sheimy, N. Multi-Sensor Multi-Floor 3D Localization With Robust Floor Detection. IEEE Access 2018, 6, 76689–76699. [Google Scholar] [CrossRef]
- Yu, M. INS/GPS Integration System using Adaptive Filter for Estimating Measurement Noise Variance. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 1786–1792. [Google Scholar] [CrossRef]
- Aghili, F.; Su, C. Robust Relative Navigation by Integration of ICP and Adaptive Kalman Filter Using Laser Scanner and IMU. IEEE/ASME Trans. Mechatron. 2016, 21, 2015–2026. [Google Scholar] [CrossRef]
- Li, Y.; He, Z.; Gao, Z.; Zhuang, Y.; Shi, C.; El-Sheimy, N. Towards Robust Crowdsourcing-Based Localization: A Fingerprinting Accuracy Indicator Enhanced Wireless/Magnetic/Inertial Integration Approach. IEEE Internet Things J. 2018. [Google Scholar] [CrossRef]
- Chiang, K.W.; Noureldin, A.; El-Sheimy, N. A new weight updating method for INS/GPS integration architectures based on neural networks. Meas.Sci. Technol. 2004, 15, 2053–2061. [Google Scholar] [CrossRef]
- Patel, M.; Emery, B.; Chen, Y. ContextualNet: Exploiting Contextual Information Using LSTMs to Improve Image-Based Localization. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–26 May 2018; pp. 1–7. [Google Scholar]
- Guan, X.; Cai, C. A new integrated navigation system for the indoor unmanned aerial vehicles (UAVs) based on the neural network predictive compensation. In Proceedings of the 2018 33rd Youth Academic Annual Conference of Chinese Association of Automation (YAC), Nanjing, China, 18–20 May 2018; pp. 575–580. [Google Scholar]
- Gu, F.; Khoshelham, K.; Yu, C.; Shang, J. Accurate Step Length Estimation for Pedestrian Dead Reckoning Localization Using Stacked Autoencoders. IEEE Trans. Instrum. Meas. 2018. [Google Scholar] [CrossRef]
- Zhang, X.; Sun, H.; Wang, S.; Xu, J. A New Regional Localization Method for Indoor Sound Source Based on Convolutional Neural Networks. IEEE Access 2018, 6, 72073–72082. [Google Scholar] [CrossRef]
- Akram, B.A.; Akbar, A.H.; Shafiq, O. HybLoc: Hybrid Indoor Wi-Fi Localization Using Soft Clustering-Based Random Decision Forest Ensembles. IEEE Access 2018, 6, 38251–38272. [Google Scholar] [CrossRef]
- Li, J.; Wei, Y.; Wang, M.; Luo, J.; Hu, Y. Two indoor location algorithms based on sparse fingerprint library. In Proceedings of the 2018 Chinese Control And Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 6753–6758. [Google Scholar]
- Gharghan, S.K.; Nordin, R.; Jawad, A.M.; Jawad, H.M.; Ismail, M. Adaptive Neural Fuzzy Inference System for Accurate Localization of Wireless Sensor Network in Outdoor and Indoor Cycling Applications. IEEE Access 2018, 6, 38475–38489. [Google Scholar] [CrossRef]
- Berz, E.L.; Tesch, D.A.; Hessel, F.P. Machine-learning-based system for multi-sensor 3D localisation of stationary objects. IET Cyber-Phys. Syst. Theory Appl. 2018, 3, 81–88. [Google Scholar] [CrossRef]
- Abdallah, A.A.; Saab, S.S.; Kassas, Z.M. A machine learning approach for localization in cellular environments. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 1223–1227. [Google Scholar]
- Konings, D.; Parr, B.; Alam, F.; Lai, E.M. Falcon: Fused Application of Light Based Positioning Coupled With Onboard Network Localization. IEEE Access 2018, 6, 36155–36167. [Google Scholar] [CrossRef]
- Jang, J.; Hong, S. Indoor Localization with WiFi Fingerprinting Using Convolutional Neural Network. In Proceedings of the 2018 Tenth International Conference on Ubiquitous and Future Networks (ICUFN), Prague, Czech Republic, 3–6 July 2018; pp. 53–758. [Google Scholar]
- Li, Z.; He, G.; Li, M.; Ma, L.; Chen, Q.; Huang, J.; Cao, J.; Feng, S.; Gao, H.; Wang, S. RBF neural network based RFID indoor localization method using artificial immune system. In Proceedings of the 2018 Chinese Control And Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 2837–2842. [Google Scholar]
- Elbakly, R.; Aly, H.; Youssef, M. TrueStory: Accurate and Robust RF-Based Floor Estimation for Challenging Indoor Environments. IEEE Sens. J. 2018, 18, 10115–10124. [Google Scholar] [CrossRef]
- Choi, J.; Lee, W.; Lee, J.; Lee, J.; Kim, S. Deep Learning Based NLOS Identification With Commodity WLAN Devices. IEEE Trans. Veh. Technol. 2018, 67, 3295–3303. [Google Scholar] [CrossRef] [Green Version]
- Bregar, K.; Mohorcic, M. Improving Indoor Localization Using Convolutional Neural Networks on Computationally Restricted Devices. IEEE Access 2018, 6, 17429–17441. [Google Scholar] [CrossRef]
- Wang, X.; Wang, X.; Mao, S. Deep Convolutional Neural Networks for Indoor Localization with CSI Images. IEEE Trans. Netw. Sci. Eng. 2018. [Google Scholar] [CrossRef]
- Valada, A.; Radwan, N.; Burgard, W. Deep Auxiliary Learning for Visual Localization and Odometry. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 6939–6946. [Google Scholar]
- Sun, Y.; Chen, J.; Yuen, C.; Rahardja, S. Indoor Sound Source Localization With Probabilistic Neural Network. IEEE Trans. Ind. Electron. 2018, 65, 6403–6413. [Google Scholar] [CrossRef] [Green Version]
- Wagstaff, B.; Kelly, J. LSTM-Based Zero-Velocity Detection for Robust Inertial Navigation. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–8. [Google Scholar]
- Dong, B.; Burgess, T.; Neuner, H.; Fercher, S. Neural Network Based Radio Fingerprint Similarity Measure. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–8. [Google Scholar]
- Luo, R.C.; Shih, W. Autonomous Mobile Robot Intrinsic Navigation Based on Visual Topological Map. In Proceedings of the 2018 IEEE 27th International Symposium on Industrial Electronics (ISIE), Cairns, QLD, Australia, 13–15 June 2018; pp. 541–546. [Google Scholar]
- Akail, N.; Moralesl, L.Y.; Murase, H. Reliability Estimation of Vehicle Localization Result. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 740–747. [Google Scholar]
- Park, C.U.; Shin, H.; Choi, Y. A Parallel Artificial Neural Network Learning Scheme Based on Radio Wave Fingerprint for Indoor Localization. In Proceedings of the 2018 Tenth International Conference on Ubiquitous and Future Networks (ICUFN), Prague, Czech Republic, 3–6 July 2018; pp. 794–797. [Google Scholar]
- Adege, A.B.; Yen, L.; Lin, H.P.; Yayeh, Y.; Li, Y.R.; Jeng, S.S.; Berie, G. Applying Deep Neural Network (DNN) for large-scale indoor localization using feed-forward neural network (FFNN) algorithm. In Proceedings of the 2018 IEEE International Conference on Applied System Invention (ICASI), Chiba, Japan, 13–17 April 2018; pp. 814–817. [Google Scholar]
- Zhu, C.; Xu, L.; Liu, X.; Qian, F. Tensor-Generative Adversarial Network with Two-Dimensional Sparse Coding: Application to Real-Time Indoor Localization. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar]
- Sabanci, K.; Yigit, E.; Ustun, D.; Toktas, A.; Aslan, M.F. WiFi Based Indoor Localization: Application and Comparison of Machine Learning Algorithms. In Proceedings of the 2018 XXIIIrd International Seminar/Workshop on Direct and Inverse Problems of Electromagnetic and Acoustic Wave Theory (DIPED), Tbilisi, Georgia, 24–27 September 2018; pp. 246–251. [Google Scholar]
- Aikawa, S.; Yamamoto, S.; Morimoto, M. WLAN Finger Print Localization using Deep Learning. In Proceedings of the 2018 IEEE Asia-Pacific Conference on Antennas and Propagation (APCAP), Auckland, New Zealand, 5–8 August 2018; pp. 541–542. [Google Scholar]
- Anzum, N.; Afroze, S.F.; Rahman, A. Zone-Based Indoor Localization Using Neural Networks: A View from a Real Testbed. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–7. [Google Scholar]
- Jeevarathnam, N.G.; Uysal, I. Grid-Based RFID Localization Using Tag Read Count And Received Signal Strength. In Proceedings of the 2018 International Joint Conference on Neural Networks (IJCNN), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–8. [Google Scholar]
- Ibrahim, M.; Torki, M.; ElNainay, M. CNN based Indoor Localization using RSS Time-Series. In Proceedings of the 2018 IEEE Symposium on Computers and Communications (ISCC), Natal, Brazil, 25–28 June 2018; pp. 01044–01049. [Google Scholar]
- Wu, G.; Tseng, P. A Deep Neural Network-Based Indoor Positioning Method using Channel State Information. In Proceedings of the 2018 International Conference on Computing, Networking and Communications (ICNC), Maui, HI, USA, 5–8 March 2018; pp. 290–294. [Google Scholar]
- Niitsoo, A.; Edelhauβer, T.; Mutschler, C. Convolutional Neural Networks for Position Estimation in TDoA-Based Locating Systems. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–8. [Google Scholar]
- Huang, Z.; Xu, J.; Pan, J. A Regression Approach to Speech Source Localization Exploiting Deep Neural Network. In Proceedings of the 2018 IEEE Fourth International Conference on Multimedia Big Data (BigMM), Xi’an, China, 13–16 September 2018; pp. 1–6. [Google Scholar]
- Sinha, H.; Patrikar, J.; Dhekane, E.G.; Pandey, G.; Kothari, M. Convolutional Neural Network Based Sensors for Mobile Robot Relocalization. In Proceedings of the 2018 23rd International Conference on Methods & Models in Automation & Robotics (MMAR), Miedzyzdroje, Poland, 27–30 August 2018; pp. 774–779. [Google Scholar]
- Fu, Y.; Chen, P.; Yang, S.; Tang, J. An Indoor Localization Algorithm Based on Continuous Feature Scaling and Outlier Deleting. IEEE Internet Things J. 2018, 5, 1108–1115. [Google Scholar] [CrossRef]
- Haeberlen, A.; Flannery, E.; Ladd, A.M.; Rudys, A.; Wallach, D.S.; Kavraki, L.E. Practical robust localization over large-scale 802.11 wireless networks. In Proceedings of the MobiCom’04, Philadelphia, PA, USA, 26 September–1 October 2004. [Google Scholar]
- Yoo, J.; Johansson, K.H.; Kim, H.J. Indoor Localization Without a Prior Map by Trajectory Learning From Crowdsourced Measurements. IEEE Trans. Instrum. Meas. 2017, 66, 2825–2835. [Google Scholar] [CrossRef]
- Guo, X.; Ansari, N.; Li, L.; Li, H. Indoor Localization by Fusing a Group of Fingerprints Based on Random Forests. IEEE Internet Things J. 2018. [Google Scholar] [CrossRef]
- Leonardo, R.; Barandas, M.; Gamboa, H. A Framework for Infrastructure-Free Indoor Localization Based on Pervasive Sound Analysis. IEEE Sens. J. 2018, 18, 4136–4144. [Google Scholar] [CrossRef]
- Roos, T.; Myllymaki, P.; Tirri, H.; Misikangas, P.; Sievanen, J. A Probabilistic Approach to WLAN User Location Estimation. Int. J. Wirel. Inf. Netw. 2002, 9, 155–164. [Google Scholar] [CrossRef]
- Kaemarungsi, K. Distribution of WLAN received signal strength indication for indoor location determination. In Proceedings of the 2006 1st International Symposium on Wireless Pervasive Computing, Phuket, Thailand, 16–18 January 2006; pp. 1–6. [Google Scholar]
- Liao, J.K.; Tsai, G.J. The Development of an Artificial Neural Networks Aided Image Localization Scheme for Indoor Navigation Applications with Floor Plans Built by Multi-platform Mobile Mapping Systems. In Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation, Portland, Oregon, 16–19 September 2017; pp. 3010–3027. [Google Scholar]
- Hagan, M.T.; Menhaj, M.B. Training feedforward networks with the Marquardt algorithm. IEEE Trans. Neural Netw. 1994, 5, 989–993. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Shin, E. Estimation Techniques for Low-Cost Inertial Navigation. Ph.D. Thesis, Department of Geomatics Engineering, University of Calgary, Calgary, AL, Canada, 2005. [Google Scholar]
- Syed, Z.; Aggarwal, P.; Yang, Y.; El-Sheimy, N. Improved Vehicle Navigation Using Aiding with Tightly Coupled Integration. In Proceedings of the VTC Spring 2008—IEEE Vehicular Technology Conference, Singapore, 11–14 May 2008; pp. 3077–3081. [Google Scholar]
- Zhang, H.; Yuan, W.; Shen, Q.; Li, T.; Chang, H. A Handheld Inertial Pedestrian Navigation System With Accurate Step Modes and Device Poses Recognition. IEEE Sens. J. 2015, 15, 1421–1429. [Google Scholar] [CrossRef]
- Wang, L.; Sun, Y.; Li, Q.; Liu, T. Estimation of Step Length and Gait Asymmetry Using Wearable Inertial Sensors. IEEE Sens. J. 2018, 18, 3844–3851. [Google Scholar] [CrossRef]
- Labbe, M.; Michaud, F. Appearance-Based Loop Closure Detection for Online Large-Scale and Long-Term Operation. IEEE Trans. Robot. 2013, 29, 734–745. [Google Scholar] [CrossRef]
- Zhuang, Y.; Li, Y.; Lan, H.; Syed, Z.; El-Sheimy, N. Smartphone-based WiFi access point localisation and propagation parameter estimation using crowdsourcing. Electron. Lett. 2015, 51, 1380–1382. [Google Scholar] [CrossRef]
- Morales, J.; Nocedal, J. Remark on “algorithm 778: L-BFGS-B: Fortran subroutines for large-scale bound constrained optimization”. J. ACM Trans. Math. Softw. 2011, 38, 1–4. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Input | Output | ANN Type/Algorithm | Hidden Layer |
|---|---|---|---|---|
| [34] | RSS, WiFi | Floor index and location | N/A | N/A |
| [35] | RSS, WiFi | Location | FF | 1–3 |
| [16] | RSS, WiFi | Room index and location | SCG and RBP | 2–4 |
| [36] | RSS, WiFi | Location | GAN | 3 |
| [37] | RSS, WiFi | Room index | N/A | 3 |
| [38] | RSS, WiFi | Location | N/A | 1 |
| [39] | RSS, WiFi | Region index | CPN | 2 |
| [17] | RSS, BLE | Location | RBF | 1 |
| [18] | RSS, ZigBee | Distance | ANFIS | 3 |
| [21] | RSS, photodiode | Cell index | CNN | 2 |
| [20] | RSS, cellular | Location | MLP | 1 |
| [19] | RSS, RFID | Location | FF | 2 |
| [31] | RSS | Fingerprint similarity | N/A | 1 |
| [40] | RSS | Location | N/A | 1 |
| [22] | RSS map | Room index and location | CNN | 8 |
| [41] | RSS map | Location | CNN | 3 |
| [23] | Differential RSS | Location | RBF | 1 |
| [24] | RSS statistics | Floor index | MLP | 1 |
| [42] | CSI, WiFi | Location | GCC | N/A |
| [25] | CSI, WiFi | NLoS identification | RNN | 10 |
| [43] | CIR | Location | CNN | 3 |
| [26] | CIR, UWB | NLoS identification | CNN | 6 |
| [27] | AoA | Location | CNN | 8 |
| [29] | GCC | AoA | GCC | 2 |
| [15] | Sound | Region index | CNN | 10 |
| [44] | Sound | AoA | TDNN | 3 |
| [13] | Laser data | Location error | RBF | 1 |
| [32] | RGB image | Image similarity | CNN | 5 |
| [12] | RGB image | Relation between images | CNN | 2 |
| [45] | RGB image | pose | CNN | 8 |
| [28] | RGB image | pose | CNN | 3 |
| [33] | RGB image, likelihood model, BM model | Localization success rate | CNN | 9 |
| [14] | Inertial sensor data | step length | N/A | 2–4 |
| [30] | Inertial sensor data | static detection | RNN | 4 |
| Strategy | STD | Mean | RMS | 80% | 95% | Max |
|---|---|---|---|---|---|---|
| WiFi | 3.4 | 4.9 | 6.4 | 7.5 | 13.7 | 21.6 |
| DR/WiFi-CN | 2.5 | 3.5 | 4.3 | 4.8 | 8.7 | 17.9 |
| DR/WiFi-GD | 1.7 | 2.6 | 3.1 | 3.7 | 5.9 | 15.2 |
| DR/WiFi-ANN | 1.9 | 2.7 | 3.3 | 3.9 | 6.2 | 13.6 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Gao, Z.; He, Z.; Zhuang, Y.; Radi, A.; Chen, R.; El-Sheimy, N. Wireless Fingerprinting Uncertainty Prediction Based on Machine Learning. Sensors 2019, 19, 324. https://doi.org/10.3390/s19020324
Li Y, Gao Z, He Z, Zhuang Y, Radi A, Chen R, El-Sheimy N. Wireless Fingerprinting Uncertainty Prediction Based on Machine Learning. Sensors. 2019; 19(2):324. https://doi.org/10.3390/s19020324
Chicago/Turabian StyleLi, You, Zhouzheng Gao, Zhe He, Yuan Zhuang, Ahmed Radi, Ruizhi Chen, and Naser El-Sheimy. 2019. "Wireless Fingerprinting Uncertainty Prediction Based on Machine Learning" Sensors 19, no. 2: 324. https://doi.org/10.3390/s19020324
APA StyleLi, Y., Gao, Z., He, Z., Zhuang, Y., Radi, A., Chen, R., & El-Sheimy, N. (2019). Wireless Fingerprinting Uncertainty Prediction Based on Machine Learning. Sensors, 19(2), 324. https://doi.org/10.3390/s19020324