A Survey of Vehicle to Everything (V2X) Testing


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. V2X Applications
3. V2X Network Challenges
3.1. Latency/Reliability Challenges
3.2. V2X Security Threats
- Authentication: Sybil attack, GPS spoofing/position faking attack, Node impersonation attack, etc.
- Availability: DoS attack, DDoS attack, Jamming attack, black hole attack, etc.
- Data Integrity: Masquerading attack, Replay attack, etc.
- Confidentiality: Eavesdropping attack, Traffic analysis attack, etc.
- Non-repudiation: Loss of events traceability, etc.
- Real-time constraints: Timing attack, etc.
4. The Need for V2X Testing
5. V2X Testing Methods
5.1. Conformance Testing
5.2. Function Testing
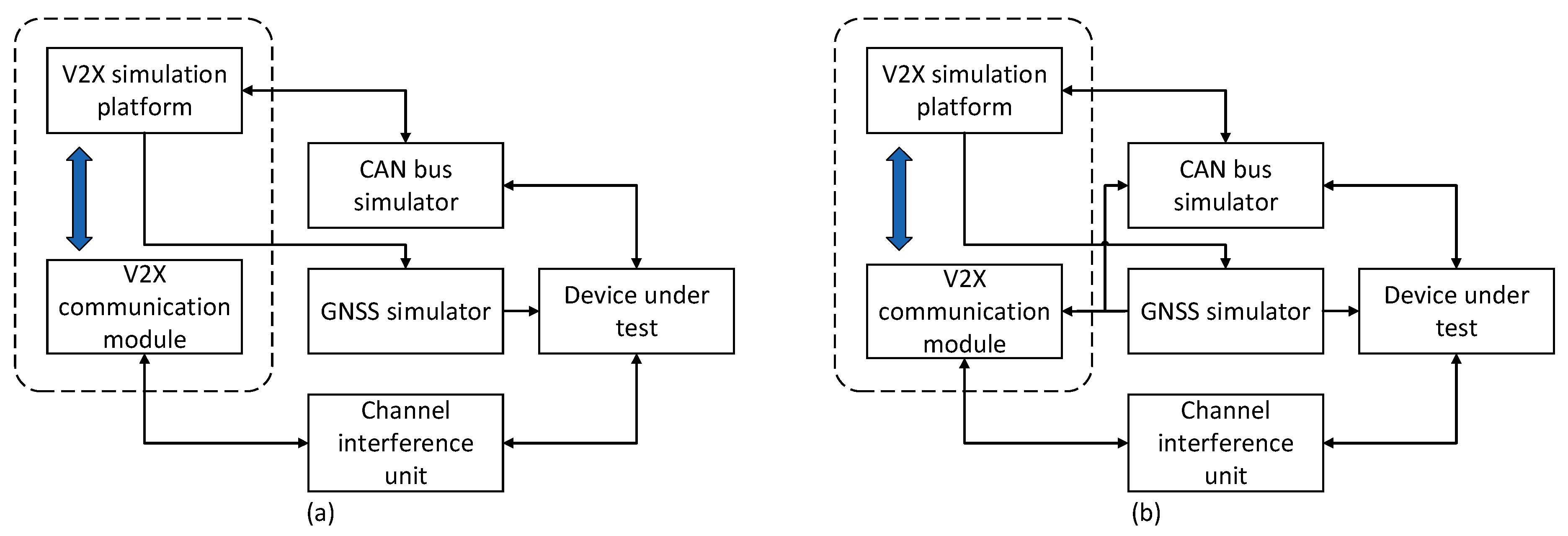
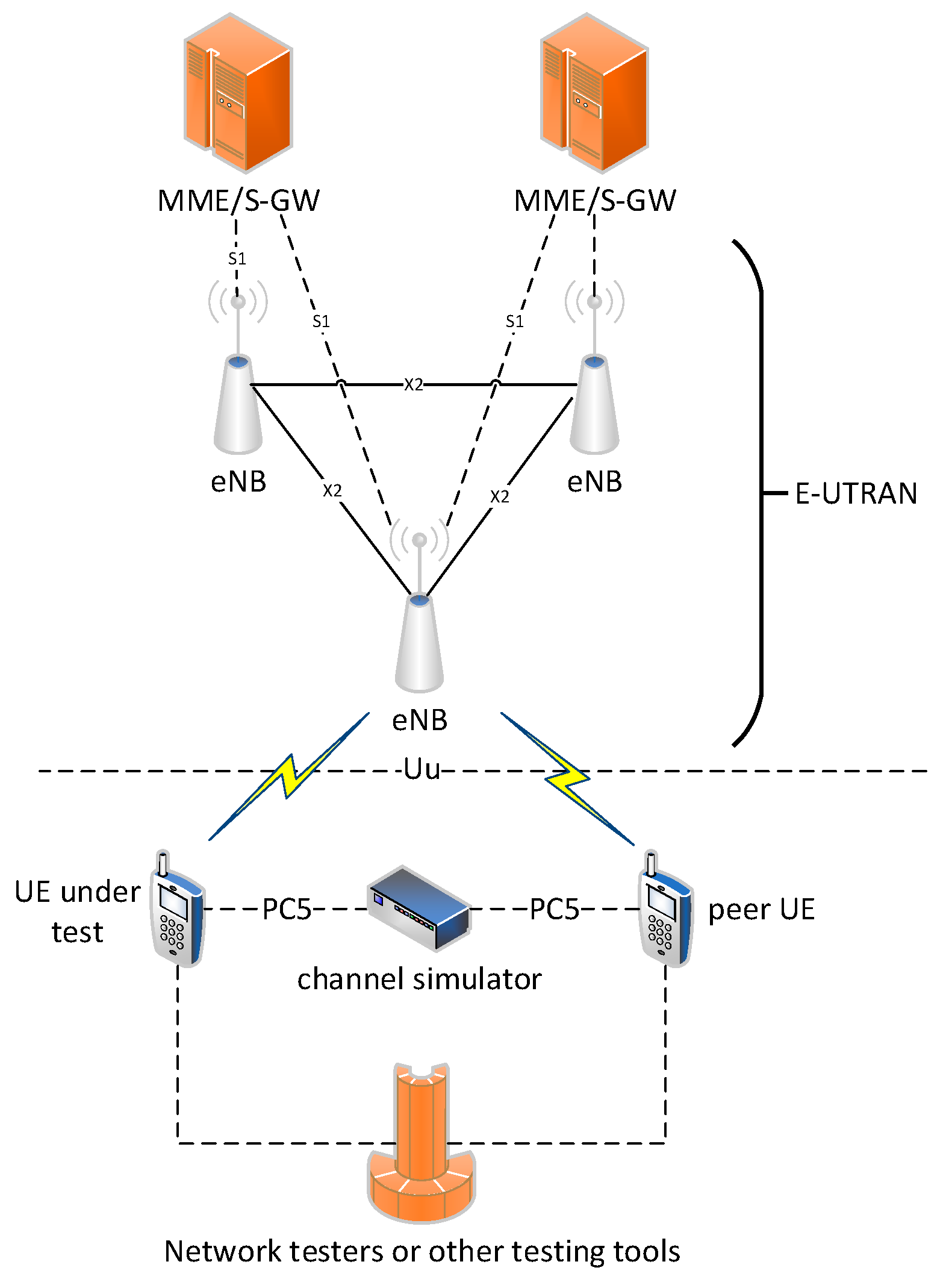
5.3. Performance Testing
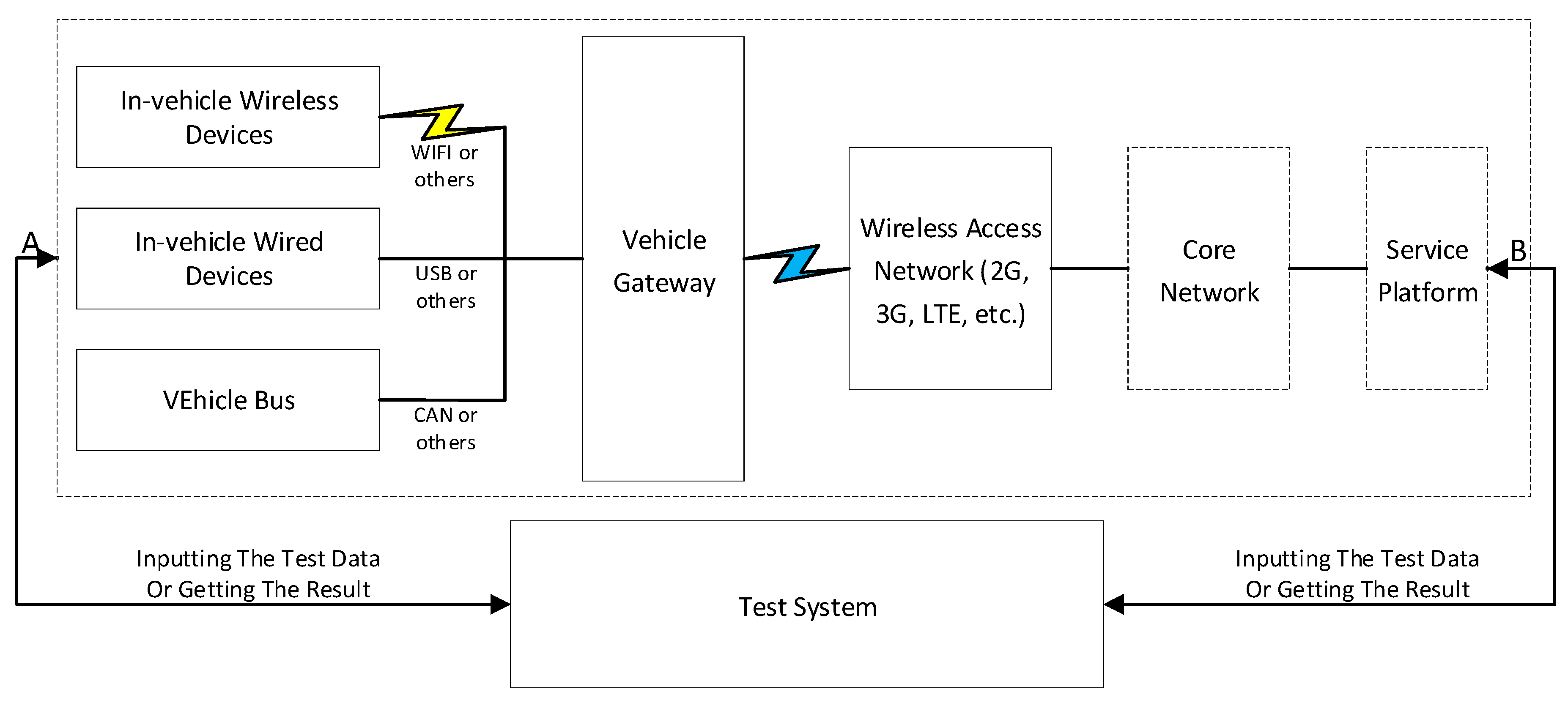
5.4. Vehicle Gateway Testing
5.5. Penetration Testing
5.6. Accelerated Testing
5.7. Field Testing
5.8. Testing Tools
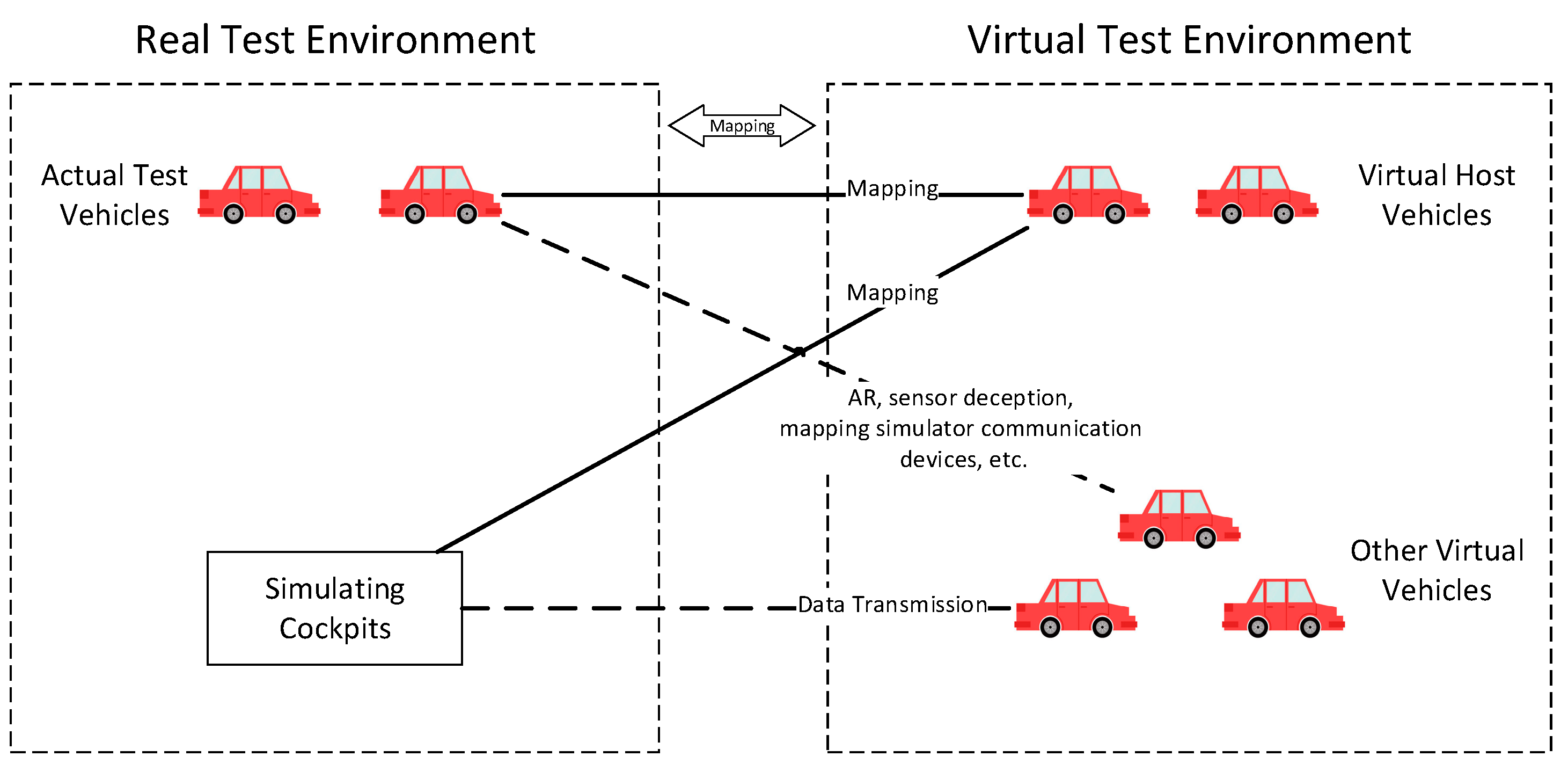
6. End-to-end Testing System Combining Virtual and Real Environments
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- 5G Americas. (March 2018). Cellular V2X Communications Towards 5G. Available online: http://www.5gamericas.org/en/resources/white-papers/ (accessed on 12 June 2018).
- IMT-2020. IMT-2020 (5G) Promotion Group. (2018 Jun.). C-V2X Security White Paper. Available online: http://www.imt2020.org.cn/zh/documents/download/82 (accessed on 30 June 2018).
- USDOT. U.S. Department of Transportation. How Connected Vehicles Work. Available online: https://www.its.dot.gov/factsheets/pdf/connected_vehicles_work.pdf (accessed on 24 February 2018).
- 5GAmericas. (October 2016). V2XCellularSolutions. [Online]. Available online: http://www.5gamericas.org/files/2914/7769/1296/5GA_V2X_Report_FINAL_for_upload.pdf (accessed on 12 June 2018).
- Kenney, J.B. Dedicated short-range communications (DSRC) standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- IEEE. IEEE Standard for Information Technology—Local and Metropolitan Area Networks—Specific Requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications Amendment 6: Wireless Access in Vehicular Environments; IEEE Std 802.11p-2010; IEEE: New York, NY, USA, 2010. [Google Scholar]
- IEEE. IEEE Standard for Wireless Access in Vehicular Environments—Security Services for Applications and Management Messages; IEEE Std 1609.2-2016; IEEE: New York, NY, USA, 2016. [Google Scholar]
- IEEE. IEEE Standard for Wireless Access in Vehicular Environments (WAVE)—Networking Services; IEEE Std 1609.3-2016; IEEE: New York, NY, USA, 2016. [Google Scholar]
- IEEE. IEEE Standard for Wireless Access in Vehicular Environments (WAVE)-Multi-Channel Operation; IEEEStd1609.4-2016; IEEE: New York, NY, USA, 2016. [Google Scholar]
- SAE. Dedicated Short Range Communications (DSRC) Message Set Dictionary; J2735; SAE: Warrendale, PA, USA, 2016. [Google Scholar]
- Araniti, G.; Campolo, C.; Condoluci, M.; Iera, A.; Molinaro, A. LTE for vehicular networking: A survey. IEEE Commun. Mag. 2013, 51, 148–157. [Google Scholar] [CrossRef]
- Toukabri, T.; Said, A.M.; Abd-Elrahman, E.; Afifi, H. Cellular Vehicular Networks (CVN): ProSe-based ITS in advanced 4G networks. In Proceedings of the 2014 IEEE 11th International Conference on Mobile Ad Hoc and Sensor Systems (MASS), Philadelphia, PA, USA, 28–30 October 2014. [Google Scholar]
- 3GPP. 3rd Generation Partnership Project; Technical Specification Group Services and System Aspects; Proximity-Based Services (ProSe); Stage 2 (Release 15); 3GPP TS 23.303 V15.0.0; 3GPP: Valbonne, France, 2017. [Google Scholar]
- 3GPP. 3rd Generation Partnership Project; Technical Specification Group Radio Access Network; Evolved Universal Terrestrial Radio Access (E-UTRA) and Evolved Universal Terrestrial Radio Access Network (E-UTRAN); Overall description; Stage 2 (Release 15); 3GPP TS 36.300 V15.0.0; 3GPP: Valbonne, France, 2017. [Google Scholar]
- 3GPP. 3rd Generation Partnership Project; Technical Specification Group Services and System Aspects; Architecture Enhancements for V2X Services (Release 14); 3GPP TS 23.285 V14.3.0; 3GPP: Valbonne, France, 2017. [Google Scholar]
- Uhlemann, E. Initial steps toward a cellular vehicle-to-everything standard [connected vehicles]. IEEE Veh. Technol. Mag. 2017, 12, 14–19. [Google Scholar] [CrossRef]
- Chen, S.; Hu, J.; Shi, Y.; Peng, Y.; Fang, J.; Zhao, R.; Zhao, L. Vehicle-to-everything (v2x) services supported by LTE-based systems and 5G. IEEE Commun. Stand. Mag. 2017, 1, 70–76. [Google Scholar] [CrossRef]
- Molina-Masegosa, R.; Gozalvez, J. LTE-V for sidelink 5G V2X vehicular communications: A new 5G technology for short-range vehicle-to-everything communications. IEEE Veh. Technol. Mag. 2017, 12, 30–39. [Google Scholar] [CrossRef]
- 5GAA. (December 2017). An Assessment of LTE-V2X (PC5) and 802.11p Direct Communications Technologies for Improved Road Safety in the EU. Available online: http://5gaa.org/wp-content/uploads/2017/12/5GAA-Road-safety-FINAL2017-12-05.pdf (accessed on 1 January 2019).
- Rebbeck, T.; Steward, J.; Lacour, H.A.; Killeen, A.; McClure, D.; Dunoyer, A. Final Report for 5GAA Socio-Economic Benefits of Cellular V2X. 5GAA. Available online: 5gaa.org/wp-content/uploads/2017/12/Final-report-for-5GAA-on-cellular-V2X-socio-economic-benefits-051217_FINAL.pdf (accessed on 1 January 2019).
- 3GPP. 3rd Generation Partnership Project; Technical Specification Group Services and System Aspects; Study on LTE Support for Vehicle to Everything (V2X) Services (Release 14); 3GPP TR 22.885 V14.0.0; 3GPP: Valbonne, France, 2015. [Google Scholar]
- 3GPP. 3rd Generation Partnership Project; Technical Specification Group Services and System Aspects; Enhancement of 3GPP Support for V2X Scenarios; Stage 1 (Release 15); 3GPP TS 22.186 V15.1.0; 3GPP: Valbonne, France, 2017. [Google Scholar]
- 3GPP. 3rd Generation Partnership Project; Technical Specification Group Services and System Aspects; Service Requirements for V2X Services; Stage 1 (Release 14); 3GPP TS 22.185 V14.3.0; 3GPP: Valbonne, France, 2017. [Google Scholar]
- Dolev, S.; Krzywiecki, Ł.; Panwar, N.; Segal, M. Dynamic attribute based vehicle authentication. Wirel. Netw. 2017, 23, 1045–1062. [Google Scholar] [CrossRef]
- Yang, Y.; Wei, Z.; Zhang, Y.; Lu, H.; Choo, K.K.R.; Cai, H. V2X security: A case study of anonymous authentication. Pervasive Mob. Comput. 2017, 41, 259–269. [Google Scholar] [CrossRef]
- Wooderson, P.; Ward, D. Cybersecurity Testing and Validation; No. 2017-01-1655; SAE Technical Paper: Warrendale, PA, USA, 2017. [Google Scholar]
- CSAE. Cooperative Intelligent Transportation System; Vehicular Communication; Application Layer Specification and Data Exchange Standard; T/CSAE 0053-2017; CSAE: Beijing, China, 2017. [Google Scholar]
- Chen, S.; Hu, J.; Shi, Y.; Zhao, L. LTE-V: A TD-LTE-based V2X solution for future vehicular network. IEEE Internet Things J. 2016, 3, 997–1005. [Google Scholar] [CrossRef]
- RoselinMary, S.; Maheshwari, M.; Thamaraiselvan, M. Early detection of DOS attacks in VANET using Attacked Packet Detection Algorithm (APDA). In Proceedings of the 2013 International Conference on Information Communication and Embedded Systems (ICICES), Chennai, India, 21–22 February 2013. [Google Scholar]
- Mejri, M.N.; Ben-Othman, J.; Hamdi, M. Survey on VANET security challenges and possible cryptographic solutions. Veh. Commun. 2014, 1, 53–66. [Google Scholar] [CrossRef]
- Gross, J.; Punyal, O.; Pereira, C.; Aguiar, A. Experimental characterization and modeling of RF jamming attacks on VANETs. IEEE Trans. Veh. Technol. 2015, 64, 524–540. [Google Scholar]
- Al-Terri, D.; Otrok, H.; Barada, H.; Al-Qutayri, M.; Al Hammadi, Y. Cooperative based tit-for-tat strategies to retaliate against greedy behavior in VANETs. Comput. Commun. 2017, 104, 108–118. [Google Scholar] [CrossRef]
- CAICT. (2017 September). Vehicular Network Security White Paper. Available online: http://www.caict.ac.cn/kxyj/qwfb/bps/201804/t20180426_158472.htm (accessed on 2 June 2018).
- Ghorbel, A.; Ghorbel, M.; Jmaiel, M. Privacy in cloud computing environments: A survey and research challenges. J. Supercomput. 2017, 73, 2763–2800. [Google Scholar] [CrossRef]
- Yan, G.; Wen, D.; Olariu, S.; Weigle, M.C. Security challenges in vehicular cloud computing. IEEE Trans. Intell. Transp. Syst. 2013, 14, 284–294. [Google Scholar] [CrossRef]
- Al-Kahtani, M.S. Survey on security attacks in Vehicular Ad hoc Networks (VANETs). In Proceedings of the 2012 6th International Conference on Signal Processing and Communication Systems (ICSPCS), Gold Coast, Australia, 12–14 December 2012. [Google Scholar]
- Engoulou, R.G.; Bellaïche, M.; Pierre, S.; Quintero, A. VANET security surveys. Comput. Commun. 2014, 44, 1–13. [Google Scholar] [CrossRef]
- Isaac, J.T.; Zeadally, S.; Camara, J.S. Security attacks and solutions for vehicular ad hoc networks. Iet Commun. 2010, 4, 894–903. [Google Scholar] [CrossRef]
- Muhammad, M.; Safdar, G.A. Survey on existing authentication issues for cellular-assisted V2X communication. Veh. Commun. 2018, 12, 50–65. [Google Scholar] [CrossRef]
- Hasrouny, H.; Samhat, A.E.; Bassil, C.; Laouiti, A. VANet security challenges and solutions: A survey. Veh. Commun. 2017, 7, 7–20. [Google Scholar] [CrossRef]
- Bayat, M.; Barmshoory, M.; Rahimi, M.; Aref, M.R. A secure authentication scheme for VANETs with batch verification. Wirel. Netw. 2015, 21, 1733–1743. [Google Scholar] [CrossRef]
- Xu, Q.; Mak, T.; Ko, J.; Sengupta, R. Vehicle-to-vehicle safety messaging in DSRC. In Proceedings of the 1st ACM International Workshop on Vehicular ad Hoc Networks, Philadelphia, PA, USA, 1 October 2004; ACM: New York, NY, USA, 2004. [Google Scholar]
- Li, W.; Ma, X.; Wu, J.; Trivedi, K.S.; Huang, X.L.; Liu, Q. Analytical model and performance evaluation of long-term evolution for vehicle safety services. IEEE Trans. Veh. Technol. 2017, 66, 1926–1939. [Google Scholar] [CrossRef]
- Oluoch, J. VANETs: Security Challenges and Future Directions. World Acad. Sci. Eng. Technol. Int.J. Comput. Electr. Autom. Control Inf. Eng. 2016, 10, 1033–1037. [Google Scholar]
- Alotaibi, M.M.; Hussein, M. High speed multi-hop data dissemination for heterogeneous transmission ranges in vanets. In Proceedings of the 2015 IEEE International Conference on Ubiquitous Wireless Broadband (ICUWB), Montreal, QC, Canada, 4–7 October 2015. [Google Scholar]
- Bai, F.; Krishnan, H. Reliability analysis of DSRC wireless communication for vehicle safety applications. In Proceedings of the Intelligent Transportation Systems Conference (ITSC’06), Toronto, ON, Canada, 17–20 September 2006. [Google Scholar]
- Urra, O.; Ilarri, S. MAVSIM: Testing VANET Applications Based on Mobile Agents. In Cognitive Vehicular Networks; CRC Press: Boca Raton, FL, USA, 2016; pp. 199–224. [Google Scholar]
- Fangchun, Y.; Shangguang, W.; Jinglin, L.; Zhihan, L.; Qibo, S. An overview of internet of vehicles. China Commun. 2014, 11, 1–15. [Google Scholar]
- Gravina, R.; Palau, C.E.; Manso, M.; Liotta, A.; Fortino, G. Integration, Interconnection, and Interoperability of IoT Systems; Springer International Publishing: New York, NY, USA, 2018. [Google Scholar]
- Eriksson, J.; Österlind, F.; Finne, N.; Tsiftes, N.; Dunkels, A.; Voigt, T.; Sauter, R.; Marrón, P.J. COOJA/MSPSim: Interoperability testing for wireless sensor networks. In Proceedings of the 2nd International Conference on Simulation Tools and Techniques, Rome, Italy, 28–31 July 2012; ICST (Institute for Computer Sciences, Social-Informatics and Telecommunications Engineering): Brussels, Belgium, 2012. [Google Scholar]
- Aho, A.V.; Dahbura, A.T.; Lee, D.; Uyar, M.U. An optimization technique for protocol conformance test generation based on UIO sequences and rural Chinese postman tours. IEEE Trans. Commun. 1991, 39, 1604–1615. [Google Scholar] [CrossRef]
- 3GPP. 3rd Generation Partnership Project; Technical Specification Group Services and System Aspects; Study on Enhancement of 3GPP Support for 5G V2X Services (Release 15); 3GPP TR 22.886 V15.1.0; 3GPP: Valbonne, France, 2017. [Google Scholar]
- Fouchal, H.; Wilhelm, G.; Bourdy, E.; Ayaida, M. A testing framework for intelligent transport systems. In Proceedings of the 2016 IEEE Symposium on Computers and Communication (ISCC), Messina, Italy, 27–30 June 2016. [Google Scholar]
- ETSI. Intelligent Transport Systems (ITS); Testing; Framework for Conformance and Interoperability Testing; ETSI EG 202 798 V1.1.1; ETSI: Sophia Antipolis, France, 2011. [Google Scholar]
- ETSI. Methods for Testing and Specification (MTS); The Testing and Test Control Notation Version 3; ETSI ES 201 873 (All Parts); ETSI: Sophia Antipolis, France, 2018. [Google Scholar]
- ISO. Information technology—Open Systems Interconnection—Conformance Testing Methodology and Framework; ISO/IEC 9646 (All Parts); ISO: Geneve, Switzerland, 1994. [Google Scholar]
- 3GPP. 3rd Generation Partnership Project; Technical Specification Group Radio Access Network; Evolved Universal Terrestrial Radio Access (E-UTRA) and Evolved Packet Core (EPC); User Equipment (UE) Conformance Specification; Part 3: Test Suites (Release 14); 3GPP TS 36.523-3 V14.2.0; 3GPP: Valbonne, France, 2017. [Google Scholar]
- ISO. Intelligent Transport Systems—Cooperative ITS—Test Architecture; ISO/TS 20026; ISO: Geneve, Switzerland, 2017. [Google Scholar]
- Fouchal, H.; Bourdy, E.; Wilhelm, G.; Ayaida, M. A framework for validation of cooperative intelligent transport systems. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016. [Google Scholar]
- Fouchal, H.; Bourdy, E.; Wilhelm, G.; Ayaida, M. A validation tool for cooperative intelligent transport systems. J. Comput. Sci. 2017, 22, 283–288. [Google Scholar] [CrossRef]
- Lattarulo, R.; Heß, D.; Matute, J.A.; Perez, J. Towards conformant models of automated electric vehicles. In Proceedings of the 2018 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Madrid, Spain, 12–14 September 2018. [Google Scholar]
- Aramrattana, M.; Larsson, T.; Jansson, J.; Nåbo, A. A simulation framework for cooperative intelligent transport systems testing and evaluation. Transp. Res. Part F Traff. Psychol. Behav. 2017. [Google Scholar] [CrossRef]
- Mittal, N.M.; Savita, C. Comparative study of simulators for vehicular ad-hoc networks (vanets). Int. J. Emerg. Technol. Adv. Eng. 2014, 4, 528–537. [Google Scholar]
- Kim, H.; Kim, T.; Kang, S.; Yoon, C.; Jung, J. Design of V2X runtime emulation framework for evaluation of vehicle safety applications. In Proceedings of the 2014 4th IEEE International Conference on Network Infrastructure and Digital Content (IC-NIDC), Beijing, China, 19–21 September 2014. [Google Scholar]
- Schiller, M.; Alois, K. Emulating Vehicular Ad Hoc Networks for Evaluation and Testing of Automotive Embedded Systems; SimuTools: Athens, Greece, 2015. [Google Scholar]
- Choudhury, A.; Maszczyk, T.; Dauwels, J.; Math, C.B.; Li, H. An integrated simulation environment for testing V2X protocols and applications. Procedia Comput. Sci. 2016, 80, 2042–2052. [Google Scholar] [CrossRef]
- Ahmed, H.; Samuel, P.; Alejandro, Q. A flexible testbed architecture for VANET. Veh. Commun. 2017, 9, 115–126. [Google Scholar] [CrossRef]
- Ming, L.; Zhao, G.; Huang, M.; Kuang, X.; Zhang, J.; Cao, H.; Xu, F. A General Testing Framework Based on Veins for Securing VANET Applications. In Proceedings of the 2018 IEEE SmartWorld, Ubiquitous Intelligence & Computing, Advanced & Trusted Computing, Scalable Computing & Communications, Cloud & Big Data Computing, Internet of People and Smart City Innovation (SmartWorld/SCALCOM/UIC/ATC/CBDCom/IOP/SCI), Guangzhou, China, 8–12 October 2018. [Google Scholar]
- Ribeiro, B.; Gonçalves, F.; Santos, A.; Nicolau, M.J.; Dias, B.; Macedo, J.; Costa, A. Simulation and Testing of a Platooning Management Protocol Implementation. International Conference on Wired/Wireless Internet Communication; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Buse, D.S.; Schettler, M.; Kothe, N.; Reinold, P.; Sommer, C.; Dressler, F. Bridging worlds: Integrating hardware-in-the-loop testing with large-scale VANET simulation. In Proceedings of the 2018 14th Annual Conference on Wireless On-demand Network Systems and Services (WONS), Isola, France, 6–8 February 2018. [Google Scholar]
- Buse, D.S.; Christoph, S.; Falko, D. Demo abstract: Integrating a driving simulator with city-scale VANET simulation for the development of next generation ADAS systems. In Proceedings of the IEEE INFOCOM 2018-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Honolulu, HI, USA, 15–19 April 2018. [Google Scholar]
- Szendrei, Z.; Varga, N.; Bokor, L. A SUMO-Based Hardware-in-the-Loop V2X Simulation Framework for Testing and Rapid Prototyping of Cooperative Vehicular Applications. Vehicle and Automotive Engineering; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Qin, Z.; Meng, Z.; Zhang, X.; Xiang, B.; Zhang, L. Performance evaluation of 802.11 p WAVE system on embedded board. In Proceedings of the 2014 International Conference on Information Networking (ICOIN), Phuket, Thailand, 10–12 February 2014. [Google Scholar]
- Carpenter, S.E.; Sichitiu, M.L.; Underwood, D.A.; Patwardhan, M.; Starr, S. Evaluating VANET Performance Using ns-3. WNS3 Workshop on NS-3. Available online: https://www.semanticscholar.org/paper/Evaluating-VANET-Performance-Using-ns-3-Carpenter-Sichitiu/7ffbacaeff0a0842640f2f69b1b3a6746208c6e1 (accessed on 22 August 2018).
- Hiromori, A.; Umedu, T.; Yamaguchi, H.; Higashino, T. Protocol testing and performance evaluation for manets with non-uniform node density distribution. In Proceedings of the IFIP International Conference on Testing Software and Systems, Aalborg, Denmark, 11–18 June 2012; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Phouthone, V.; Dong, W. Simulation based and analysis of routing protocols for vanet using vanetmobisim and NS-2. Int. J. Comput. Eng. Technol. 2015, 6, 32–41. [Google Scholar]
- Marzak, B.; Toumi, H.; Benlahmar, E.; Talea, M. Performance analysis of routing protocols in vehicular ad hoc network. In Advances in Ubiquitous Networking 2; Springer: Singapore, 2017; pp. 31–42. [Google Scholar]
- Prakash, U.; Pal, R.; Gupta, N. Performance evaluation of IEEE 802.11 p by varying data rate and node density in vehicular ad hoc network. In Proceedings of the 2015 IEEE Students Conference on Engineering and Systems (SCES), Allahabad, India, 6–8 November 2015. [Google Scholar]
- Huang, X.; Zhao, D.; Peng, H. Empirical study of dsrc performance based on safety pilot model deployment data. Parameters 2017, 12, 14. [Google Scholar] [CrossRef]
- Shi, M.; Lu, C.; Zhang, Y.; Yao, D. DSRC and LTE-V communication performance evaluation and improvement based on typical V2X application at intersection. In Proceedings of the Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017. [Google Scholar]
- Kawasaki, R.; Onishi, H.; Murase, T. Performance evaluation on V2X communication with PC5-based and Uu-based LTE in crash warning application. In Proceedings of the 2017 IEEE 6th Global Conference on Consumer Electronics (GCCE), Nagoya, Japan, 24–27 October 2017. [Google Scholar]
- Nguyen, H.; Liu, Z.; Jamaludin, D.; Guan, Y. A Semi-Empirical Performance Study of Two-Hop DSRC Message Relaying at Road Intersections. Information 2018, 9, 147. [Google Scholar] [CrossRef]
- Zhang, X.; Miao, Q.; Li, Y. An Adaptive Link Quality-Based Safety Message Dissemination Scheme for Urban VANETs. IEEE Commun. Lett. 2018, 22, 2104–2107. [Google Scholar] [CrossRef]
- Ali, G.M.N.; Rahim, M.N.A.; Chong, P.H.J.; Guan, Y.L. Analysis and improvement of reliability through coding for safety message broadcasting in urban vehicular networks. IEEE Trans. Veh. Technol. 2018. [Google Scholar] [CrossRef]
- Noor-A-Rahim, M.; Ali, G.M.N.; Nguyen, H.; Guan, Y.L. Performance Analysis of IEEE 802.11 p Safety Message Broadcast with and Without Relaying at Road Intersection. IEEE Access 2018, 6, 23786–23799. [Google Scholar] [CrossRef]
- Bechtsoudis, A.; Nicolas, S. Aiming at higher network security through extensive penetration tests. IEEE Lat. Am. Trans. 2012, 10, 1752–1756. [Google Scholar] [CrossRef]
- McDermott, J.P. Attack net penetration testing. In Proceedings of the 2000 Workshop on New Security Paradigms, Cloudcroft, NM, USA, 11–13 September 2001; ACM: New York, NY, USA, 2001. [Google Scholar]
- SAE. Cybersecurity Guidebook for Cyber-Physical Vehicle Systems; J3061; SAE: Warrendale, PA, USA, 2016. [Google Scholar]
- Whitaker, A.; Daniel, P.N. Penetration Testing and Network Defense; Cisco Press: Indianapolis, IN, USA, 2005. [Google Scholar]
- McGraw, G. Software security. IEEE Secur. Priv. 2004, 2, 80–83. [Google Scholar] [CrossRef]
- Chen, C.K.; Zhang, Z.K.; Lee, S.H.; Shieh, S. Penetration Testing in the IoT Age. Computer 2018, 51, 82–85. [Google Scholar] [CrossRef]
- Thompson, H.H. Application penetration testing. IEEE Secur. Priv. 2005, 3, 66–69. [Google Scholar] [CrossRef]
- Antunes, N.; Marco, V. Penetration testing for web services. Computer 2014, 47, 30–36. [Google Scholar] [CrossRef]
- Arkin, B.; Stender, S.; McGraw, G. Software penetration testing. IEEE Secur. Priv. 2005, 3, 84–87. [Google Scholar] [CrossRef]
- Zhao, D.; Huei, P. From the Lab to the Street: Solving the Challenge of Accelerating Automated Vehicle Testing. arXiv, 2017; arXiv:1707.04792. [Google Scholar]
- Zhao, D.; Huang, X.; Peng, H.; Lam, H.; LeBlanc, D.J. Accelerated evaluation of automated vehicles in car-following maneuvers. IEEE Trans. Intell. Transp. Syst. 2018, 19, 733–744. [Google Scholar] [CrossRef]
- Zhao, D.; Lam, H.; Peng, H.; Bao, S.; LeBlanc, D.J.; Nobukawa, K.; Pan, C.S. Accelerated Evaluation of Automated Vehicles Safety in Lane-Change Scenarios Based on Importance Sampling Techniques. IEEE Trans. Intell. Transp. Syst. 2017, 18, 595–607. [Google Scholar] [CrossRef] [Green Version]
- Zhao, D. Accelerated Evaluation of Automated Vehicles. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2016. [Google Scholar]
- Bezzina, D.; Sayer, J. Safety Pilot Model Deployment: Test Conductor Team Report; Report No. DOT HS 812. Available online: https://www.nhtsa.gov/sites/nhtsa.dot.gov/files/812171-safetypilotmodeldeploydeltestcondrtmrep.pdf (accessed on 25 August 2018).
- Brecht, B.; Therriault, D.; Weimerskirch, A.; Whyte, W.; Kumar, V.; Hehn, T.; Goudy, R. A Security Credential Management System for V2X Communications. IEEE Trans. Intell. Transp. Syst. 2018, 99, 1–22. [Google Scholar] [CrossRef]
- Ameixieira, C.; Cardote, A.; Neves, F.; Meireles, R.; Sargento, S.; Coelho, L.; Afonso, J.; Areias, B.; Mota, E.; Costa, R.; et al. Harbornet: A real-world testbed for vehicular networks. IEEE Commun. Mag. 2014, 52, 108–114. [Google Scholar] [CrossRef]
- Weiß, C. V2X communication in Europe–From research projects towards standardization and field testing of vehicle communication technology. Comput. Netw. 2011, 55, 3103–3119. [Google Scholar] [CrossRef]
- Gomez, L.R.P.; Fairfield, N.; Szybalski, A.; Nemec, P.; Urmson, C. Transitioning a Mixed-Mode Vehicle to Autonomous Mode. U.S. Patent No. 8,078,349, 13 December 2011. [Google Scholar]
- Xin, H.; Co, W.P. Study on the V2X System Based on Vehicle Road Test; Science & Technology Vision: Shanghai, China, 2016. [Google Scholar]
- Wang, F.Y. Parallel control and management for intelligent transportation systems: Concepts, architectures, and applications. IEEE Trans. Intell. Transp. Syst. 2010, 11, 630–638. [Google Scholar] [CrossRef]
- Schünemann, B. V2X simulation runtime infrastructure VSimRTI: An assessment tool to design smart traffic management systems. Comput. Netw. 2011, 55, 3189–3198. [Google Scholar] [CrossRef]









© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Shao, Y.; Ge, Y.; Yu, R. A Survey of Vehicle to Everything (V2X) Testing. Sensors 2019, 19, 334. https://doi.org/10.3390/s19020334
Wang J, Shao Y, Ge Y, Yu R. A Survey of Vehicle to Everything (V2X) Testing. Sensors. 2019; 19(2):334. https://doi.org/10.3390/s19020334
Chicago/Turabian StyleWang, Jian, Yameng Shao, Yuming Ge, and Rundong Yu. 2019. "A Survey of Vehicle to Everything (V2X) Testing" Sensors 19, no. 2: 334. https://doi.org/10.3390/s19020334
APA StyleWang, J., Shao, Y., Ge, Y., & Yu, R. (2019). A Survey of Vehicle to Everything (V2X) Testing. Sensors, 19(2), 334. https://doi.org/10.3390/s19020334