Indoor 3-D Localization Based on Received Signal Strength Difference and Factor Graph for Unknown Radio Transmitter


Abstract
:1. Introduction
2. The System and Principle
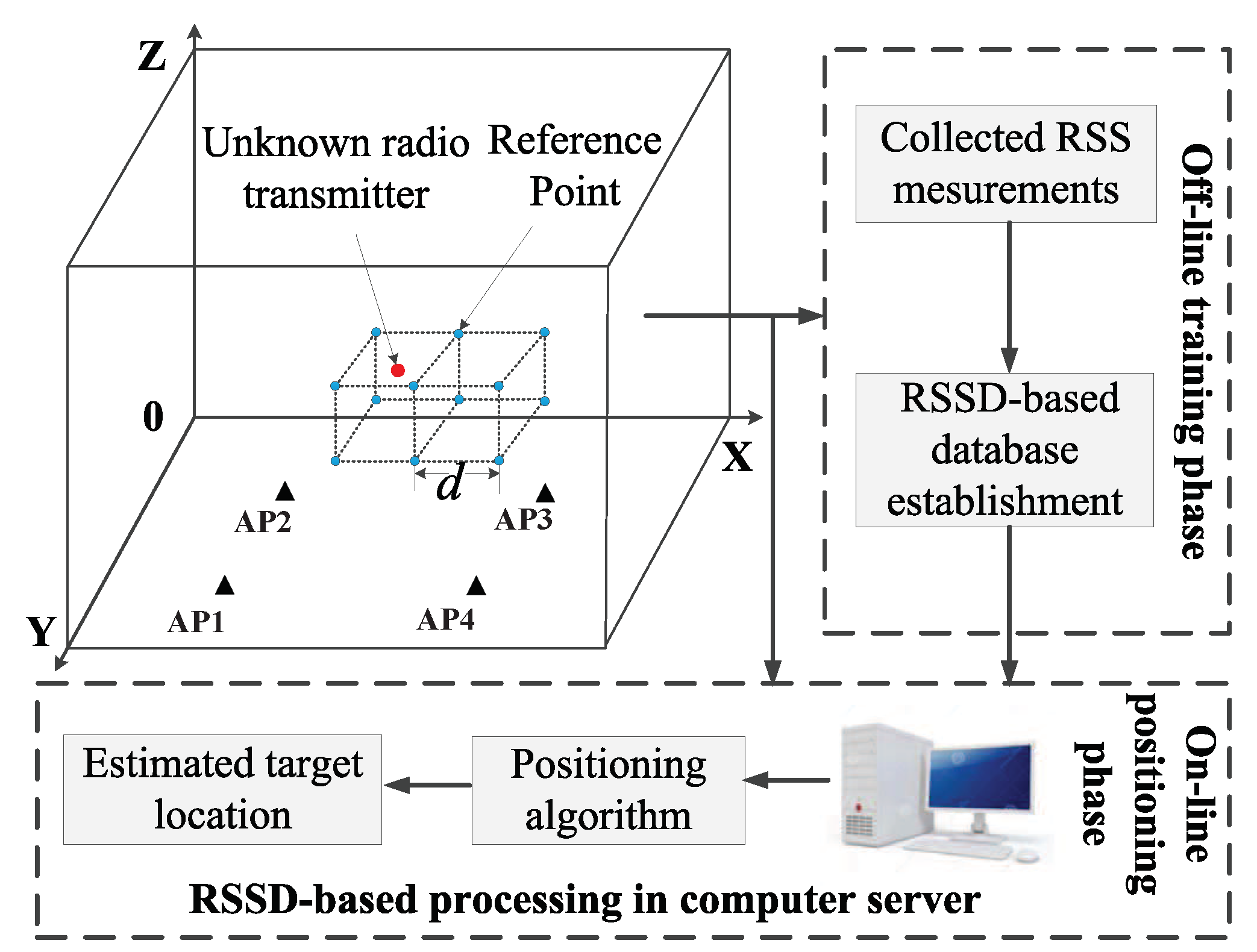
2.1. Positioning System for the Unknown Radio Transmitter
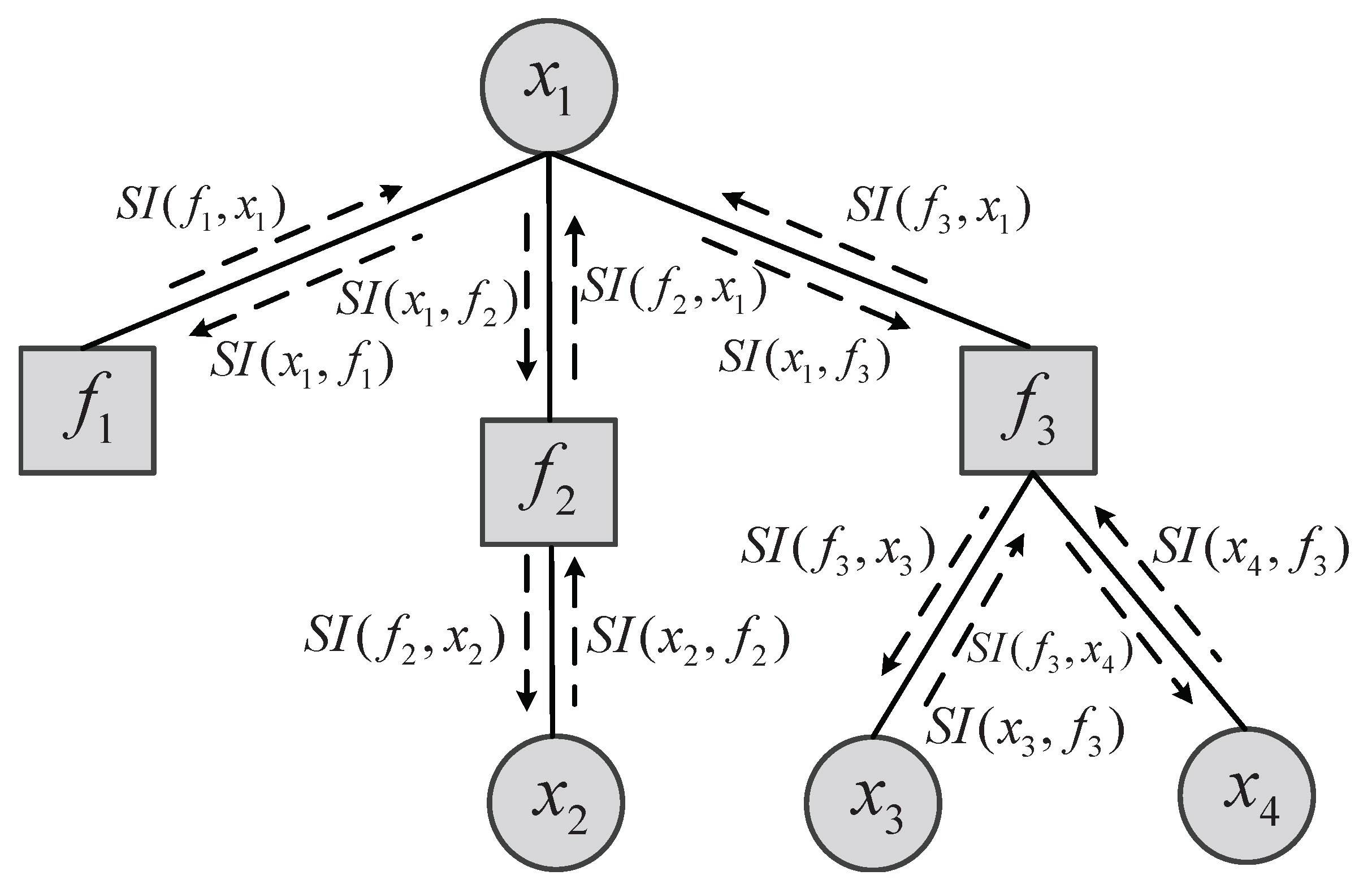
2.2. Factor Graph and Sum-Product Algorithm
3. The Proposed Algorithm
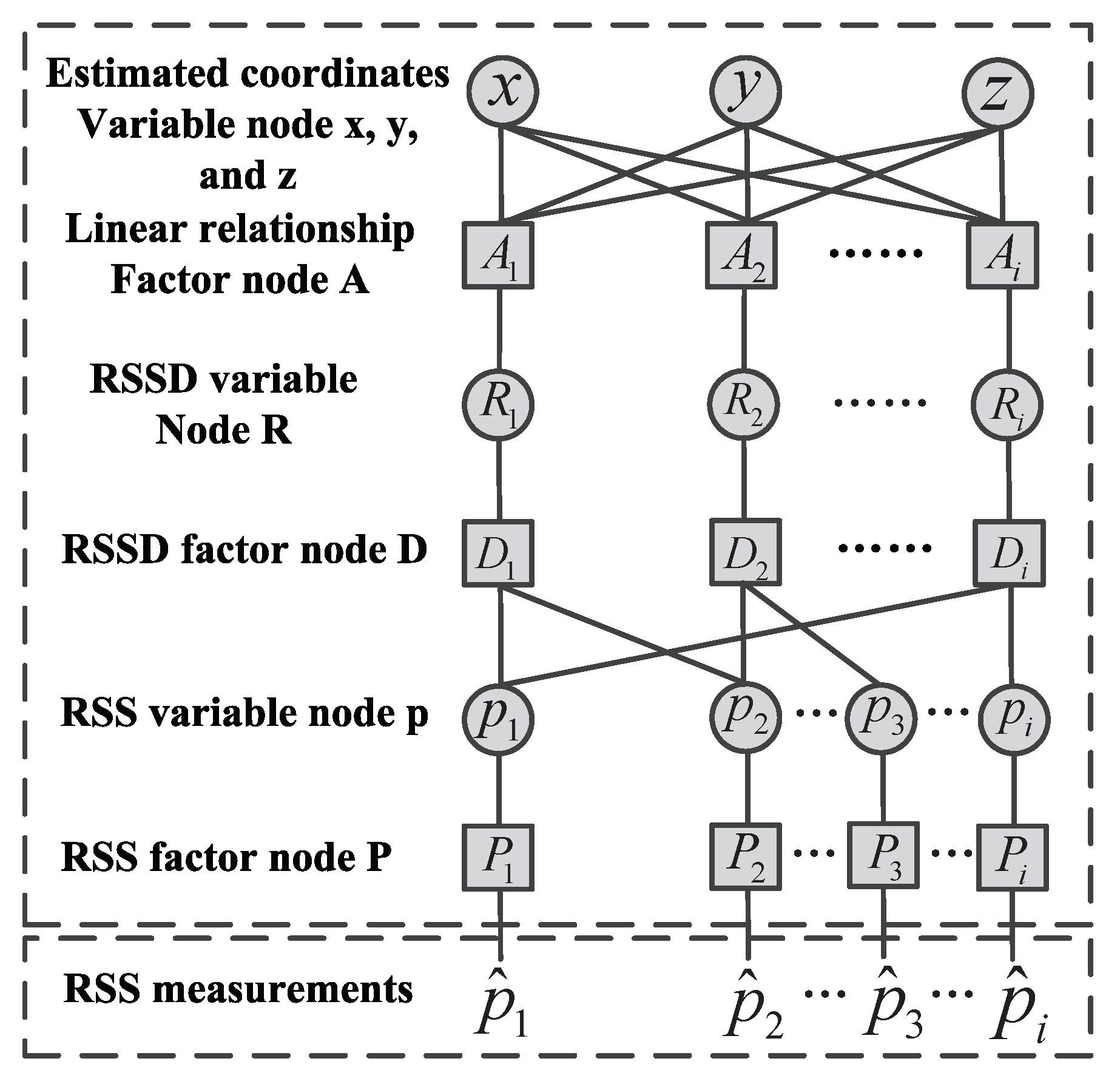
3.1. 3-D RSSD-Based FG Model
3.2. Soft Information Calculation and Iterative Process
4. Results and Discussions
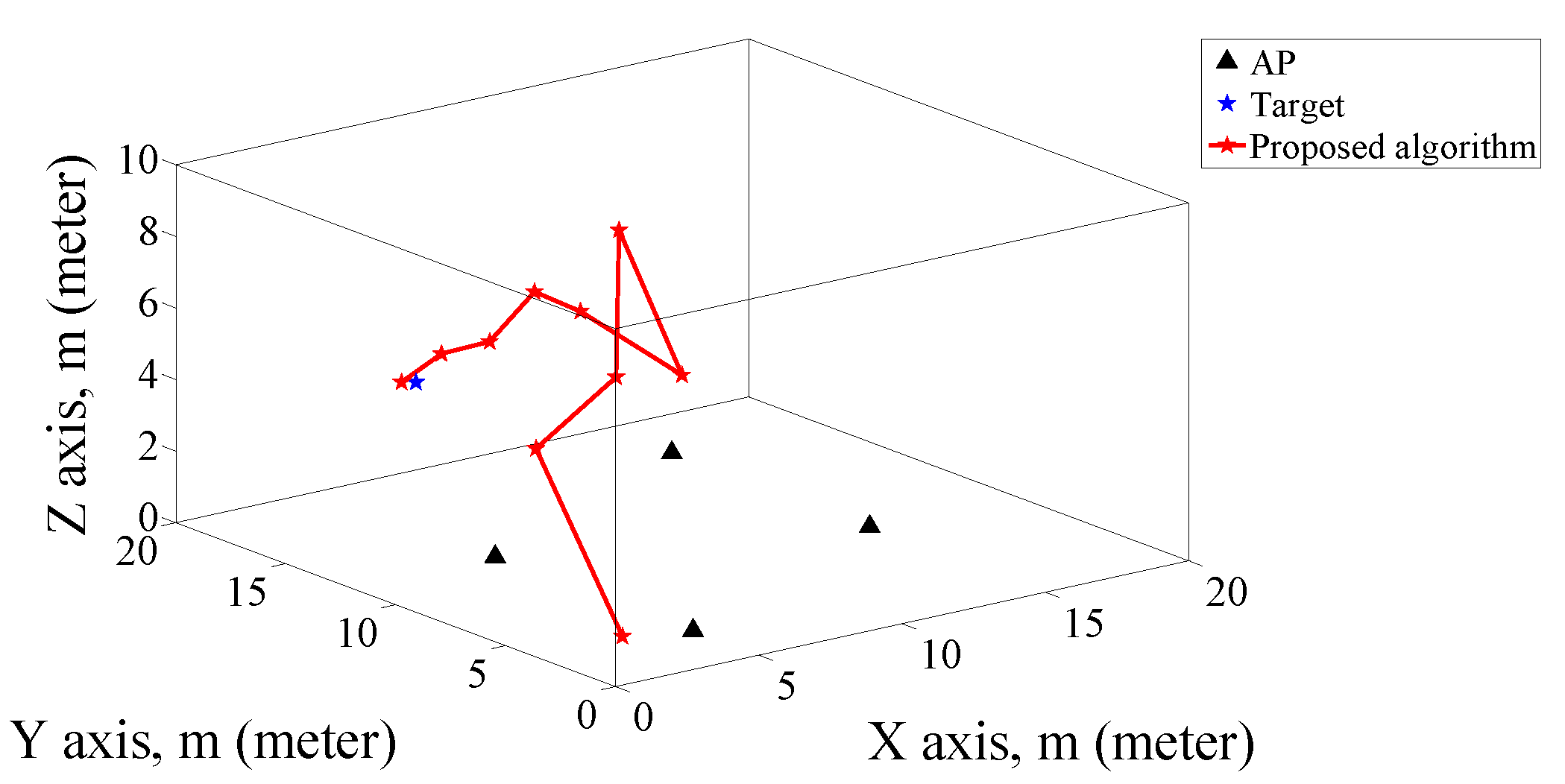
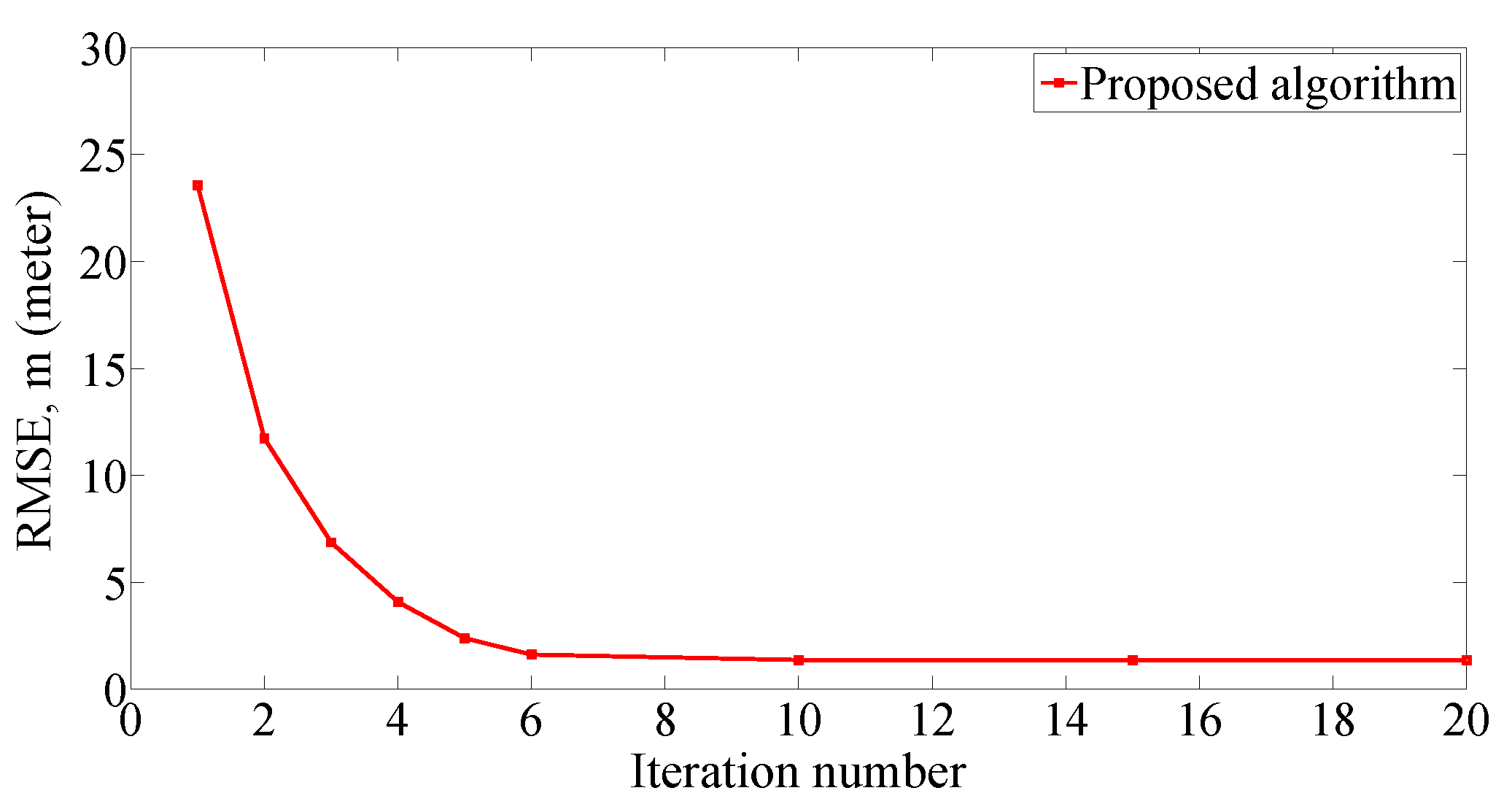
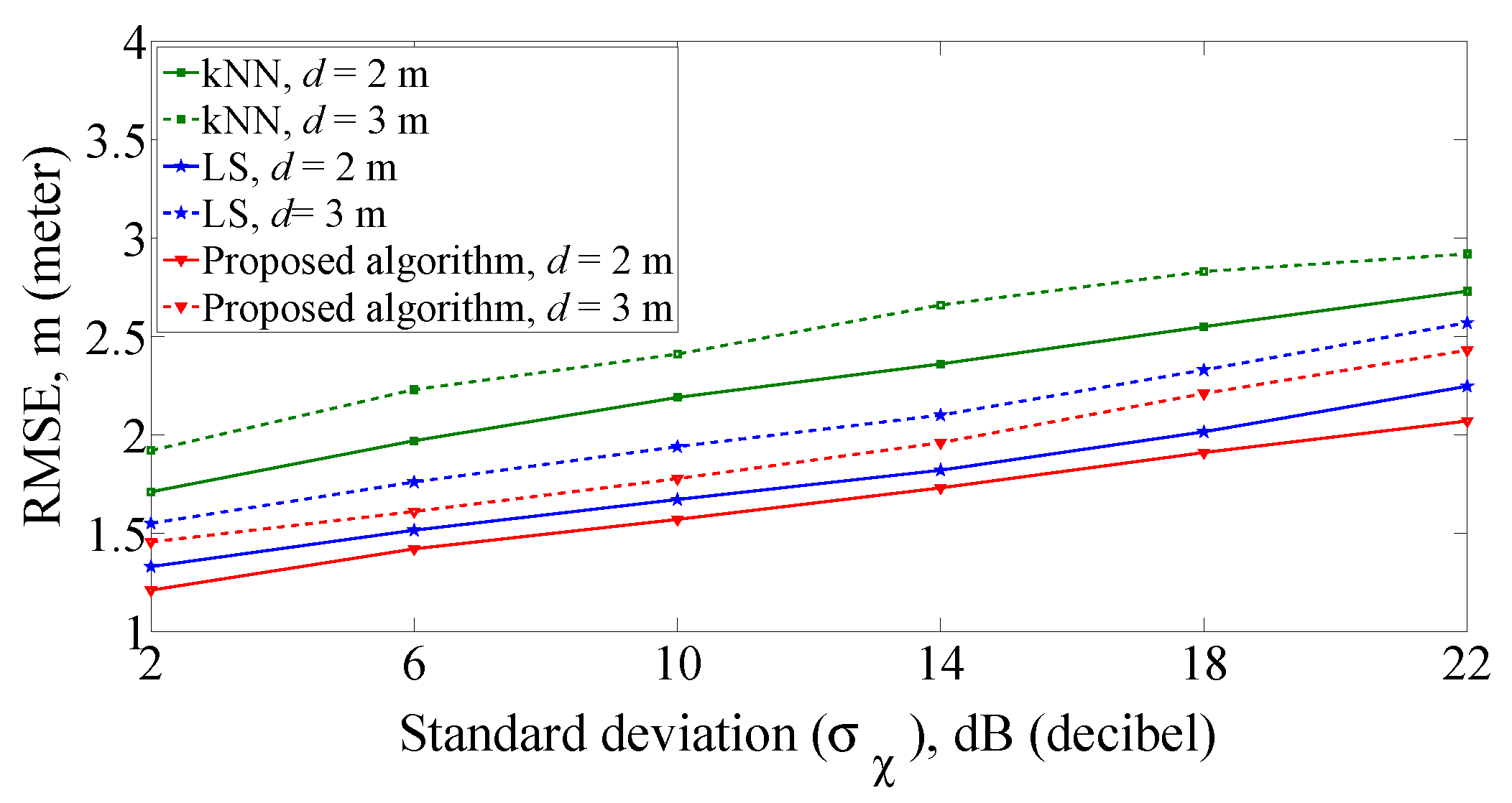
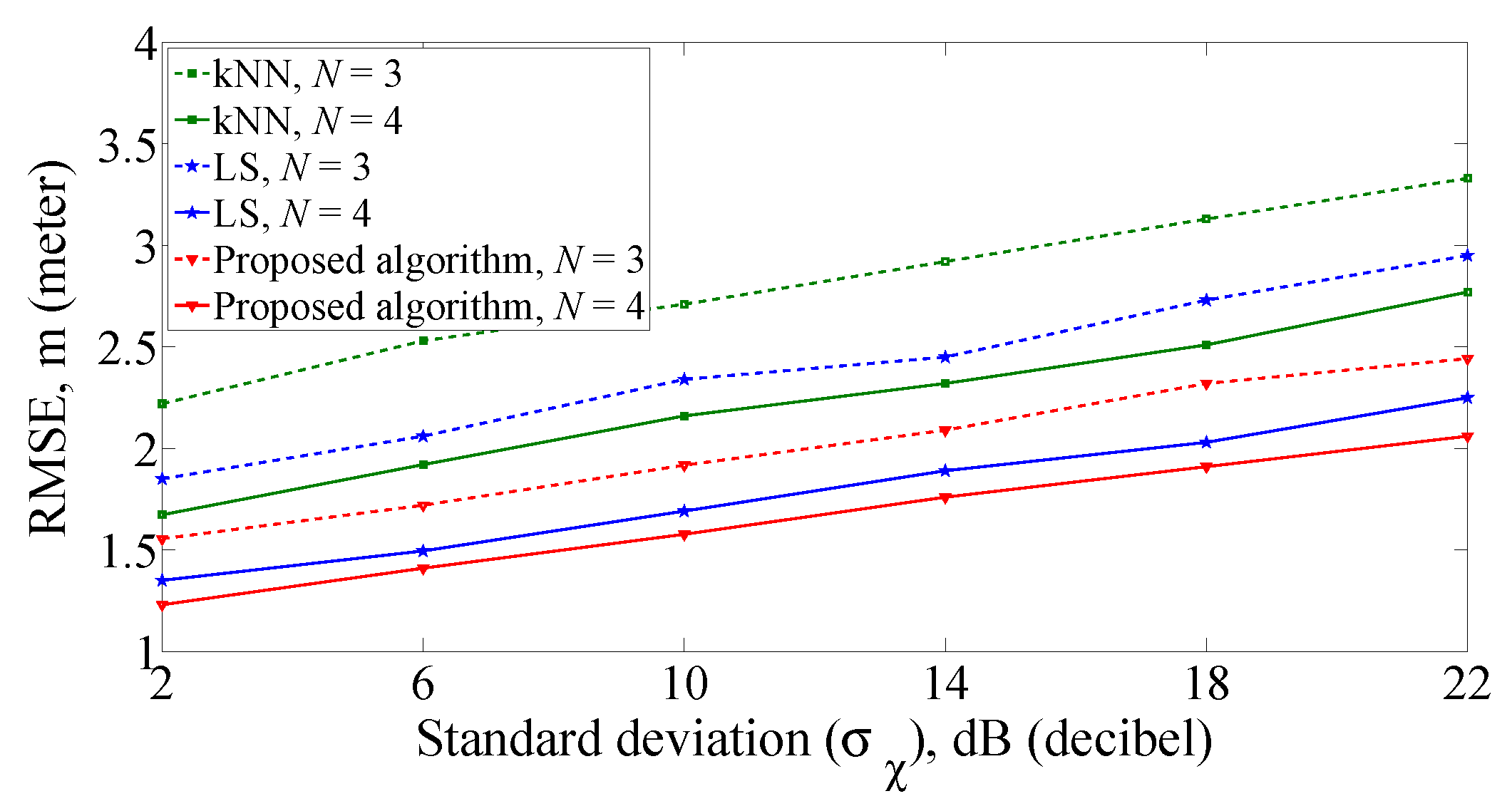
4.1. Simulation Analysis
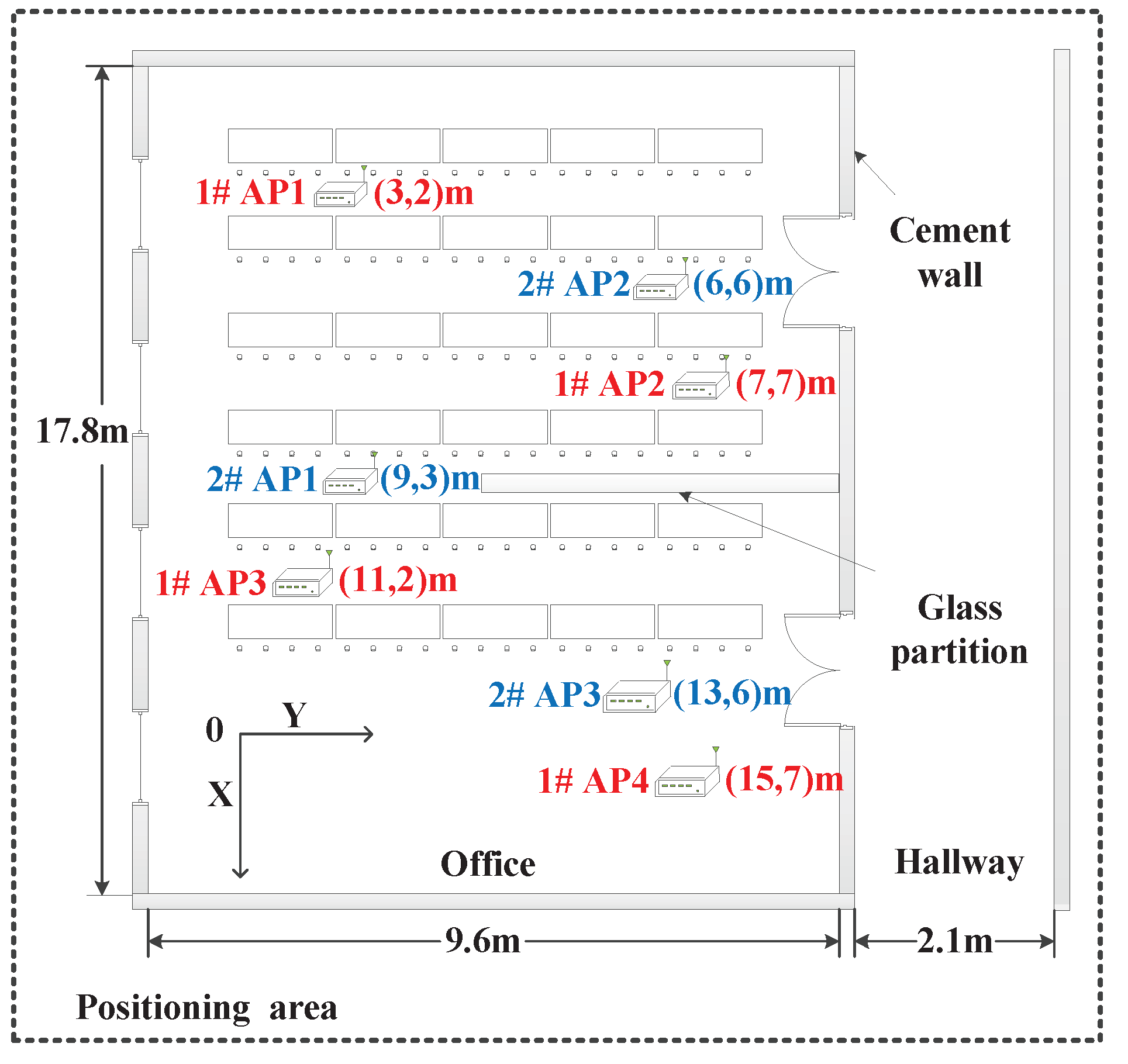
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| 2-D | Two-dimensional |
| 3-D | Three-dimensional |
| FG | Factor graph |
| kNN | k-nearest neighbors |
| LS | Least square |
| AP | Access point |
| TOA | Time of arrival |
| TDOA | Time difference of arrival |
| RSS | Received signal strength |
| ECLS | Extended candidate location set |
| RSSD | Received signal strength difference |
| SDP | semidefinite programming |
| LOS | Line of sight |
| NLOS | Non-line of sight |
| CDF | Cumulative distribution function |
References
- Tomic, S.; Beko, M.; Dinis, R.; Montezuma, P. A Robust Bisection-based Estimator for TOA-based Target Localization in NLOS Environments. IEEE Commun. Lett. 2017, 21, 2488–2491. [Google Scholar] [CrossRef]
- Su, Z.; Shao, G.; Liu, H. Semidefinite Programming for NLOS Error Mitigation in TDOA Localization. IEEE Commun. Lett. 2018, 22, 1430–1433. [Google Scholar] [CrossRef]
- Wang, Y.; Ho, K.C. An Asymptotically Efficient Estimator in Closed-form for 3-D AOA Localization Using a Sensor Network. IEEE Trans. Wirel. Commun. 2015, 14, 6524–6535. [Google Scholar] [CrossRef]
- Liu, C.; Fang, D.; Yang, Z.; Jiang, H.; Chen, X.; Wang, W.; Xing, T.; Cai, L. RSS Distribution-Based Passive Localization and Its Application in Sensor Networks. IEEE Trans. Wirel. Commun. 2016, 14, 6524–6535. [Google Scholar] [CrossRef]
- Talvitie, J.; Renfors, M.; Lohan, E.S. Distance-Based Interpolation and Extrapolation Methods for RSS-Based Localization with Indoor Wireless Signals. IEEE Trans. Veh. Technol. 2015, 64, 1340–1353. [Google Scholar] [CrossRef]
- Li, Y.-Y.; Qi, G.-Q.; Sheng, A.-D. Performance Metric on the Best Achievable Accuracy for Hybrid TOA/AOA Target Localization. IEEE Commun. Lett. 2018, 22, 1474–1477. [Google Scholar] [CrossRef]
- Tomic, S.; Beko, M.; Dinis, R. 3-D Target Localization in Wireless Sensor Networks Using RSS and AoA Measurements. IEEE Trans. Veh. Technol. 2017, 66, 3197–3210. [Google Scholar] [CrossRef]
- Catovic, A.; Sahinoglu, Z. The Cramer-Rao Bounds of Hybrid TOA/RSS and TDOA/RSS Location Estimation Schemes. IEEE Commun. Lett. 2004, 8, 626–628. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V.N. RADAR: An In-building RF-based User Location and Tracking System. In Proceedings of the IEEE INFOCOM 2000, Tel Aviv, Israel, 26–30 March 2000; pp. 775–784. [Google Scholar] [CrossRef]
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. In Proceedings of the First IEEE International Conference on Pervasive Computing and Communications, Fort Worth, TX, USA, 26 March 2003; pp. 407–415. [Google Scholar] [CrossRef]
- Hoang, M.T.; Zhu, Y.; Yuen, B.; Reese, T.; Dong, X.; Lu, T.; Westendorp, R.; Xie, M. A Soft Range Limited K-Nearest Neighbors Algorithm for Indoor Localization Enhancement. IEEE Sens. J. 2018, 18, 10208–10216. [Google Scholar] [CrossRef]
- Xu, Y.; Zhou, J.; Zhang, P. RSS-based Source Localization When Path-loss Model Parameters are Unknown. IEEE Commun. Lett. 2014, 18, 1055–1058. [Google Scholar] [CrossRef]
- Guo, X.; Zhu, S.; Lin, L.; Hu, F.; Ansari, N. Accurate WiFi Localization by Unsupervised Fusion of Extended Candidate Location Set. IEEE Internet Things J. 2018. Available online: https://ieeexplore.ieee.org/document/8466583 (accessed on 17 September 2018). [CrossRef]
- Hu, Y.; Leus, G. Robust Differential Received Signal Strength-based Localization. IEEE Trans. Signal Process. 2017, 65, 3261–3276. [Google Scholar] [CrossRef]
- Hossain, A.K.M.M.; Jin, Y.; Soh, W.; Van, H.N. SSD: A roubst RF Location Fingerprint Addressing Mobile Devices Heterogeneity. IEEE Trans. Mob. Comput. 2013, 12, 65–77. [Google Scholar] [CrossRef]
- Lohrasbipeydeh, H.; Gulliver, T.A.; Amindavar, H. Unknown Transmit Power RSSD Based Source Localization with Sensor Position Uncertainty. IEEE Trans. Commun. 2015, 163, 1784–1797. [Google Scholar] [CrossRef]
- Lohrasbipeydeh, H.; Gulliver, T.A.; Amindavar, H. A Minimax SDP Method for Energy Based Source Localization with Unknown Transmit Power. IEEE Commun. Lett. 2014, 3, 433–436. [Google Scholar] [CrossRef]
- Chen, J.-C.; Wang, Y.-C.; Maa, C.-S. Network-Side Mobile Position Location Using Factor Graphs. IEEE Trans. Wirel. Commun. 2016, 63, 2696–2704. [Google Scholar] [CrossRef]
- Jhi, H.-L.; Chen, J.-C.; Lin, C.-H.; Huang, C.-T. A Factor-graph-based TOA Location Estimator. IEEE Trans. Wirel. Commun. 2012, 11, 1764–1773. [Google Scholar] [CrossRef]
- Mensing, C.; Plass, S. Positioning Based on Factor Graphs. EURASIP J. Adv. Signal Process. 2007, 1, 1–11. [Google Scholar] [CrossRef]
- Huang, C.-T.; Wu, C.-H.; Lee, Y.-N.; Chen, J.-T. A Novel Indoor RSS-based Position Location Algorithm Using Factor Graphs. IEEE Trans. Wirel. Commun. 2009, 8, 3050–3058. [Google Scholar] [CrossRef]
- Aziz, M.R.K.; Anwar, K.; Matsumoto, T. DRSS-based Factor Graph Geolocation Technique for Position Detection of Unknown Radio Emitter. In Proceedings of the International Workshop on Advanced PHY and MAC Layer Design for 5G Mobile Networks and Internet of Things in conjunction with European Wireless, Oulu, Finland, 18–20 May 2016; pp. 300–305. [Google Scholar]
- Kschischang, F.R.; Frey, B.J.; Loeliger, H. Factor graphs and the sum-Product algorithm. IEEE Trans. Inf. Theory 2001, 47, 498–519. [Google Scholar] [CrossRef]
- Cong, L.; Zhang, W. Hybrid TDOA/AOA Mobile User Location for Wideband CDMA Celluar Systems. IEEE Trans. Wirel. Commun. 2002, 1, 439–447. [Google Scholar] [CrossRef]
- Patwari, N.; Ash, J.N.; Kyperountas, S.; Hero, A.O.; Moses, R.L.; Correal, N.S. Locating the nodes: Cooperative localization in wireless sensor networks. IEEE Signal Process. Mag. 2005, 22, 54–69. [Google Scholar] [CrossRef]
- Wylie, M.P.; Holtzman, J. The Non-line of Sight Problem in Mobile Location Estimation. In Proceedings of the 5th International Conference on Universal Personal Communications, Cambridge, MA, USA, 2 October 1996; pp. 827–831. [Google Scholar] [CrossRef]
- O’Donoughue, N.; Moura, J.M.F. On the Product of Independent Complex Gaussians. IEEE Trans. Signal Process. 2012, 60, 1050–1063. [Google Scholar] [CrossRef]
- Cheffena, M.; Mohamed, M. The Application of Lognormal Mixture Shadowing Model for B2B Channels. IEEE Sens. Lett. 2018, 2. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Node | Input (Mean, Variance) | Output (Mean, Variance) |
|---|---|---|
| , | , | |
| (, ) | , | |
| (,), , | , | |
| , | ||
| , | ||
| x | , | |
| y | , | |
| z | , |
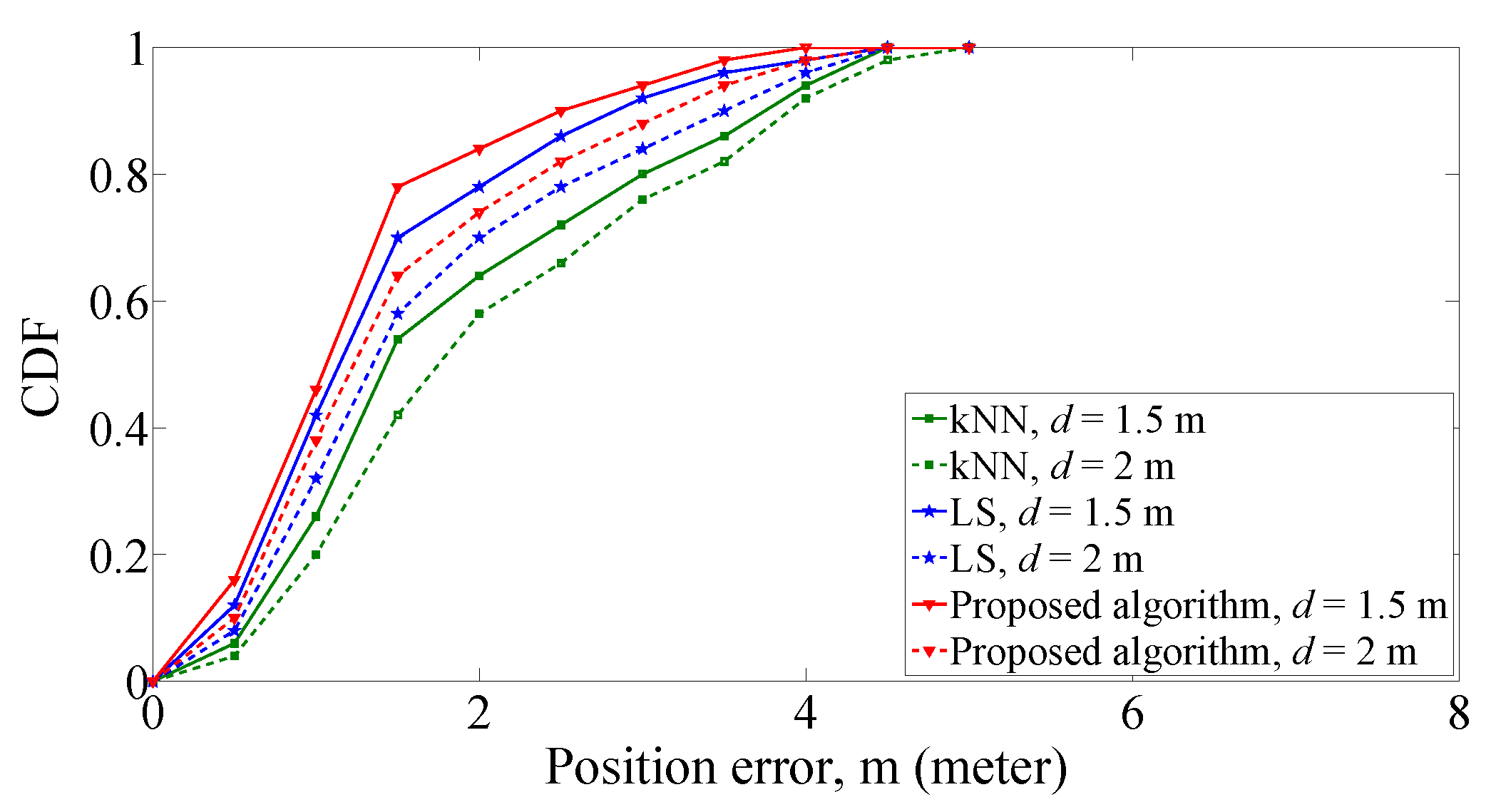
| Grid Distance | kNN | LS | Proposed Algorithm |
|---|---|---|---|
| 1.5 m | 1.41 m | 1.37 m | 1.12 m |
| 2 m | 1.62 m | 1.46 m | 1.25 m |
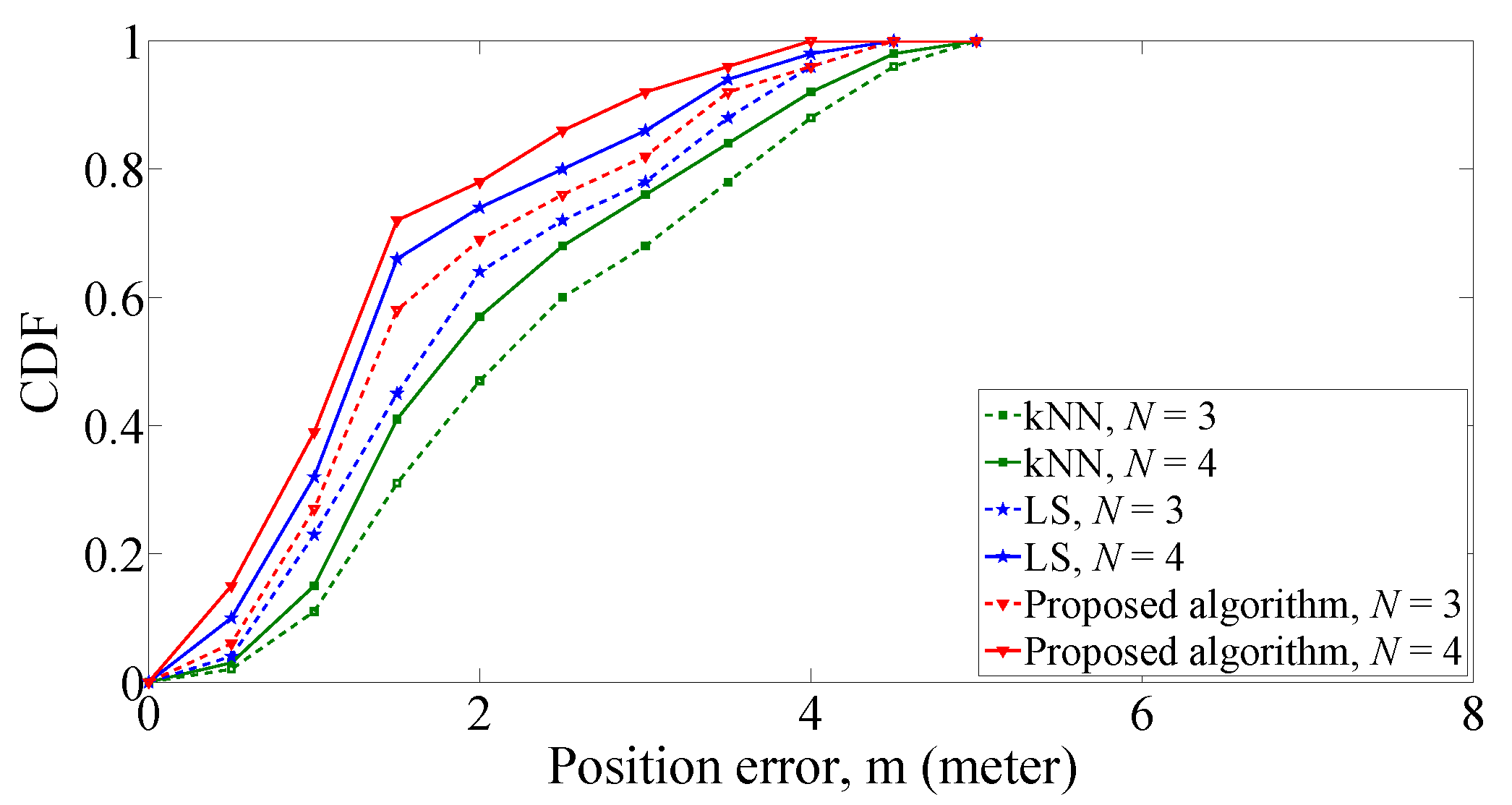
| Number of APs | kNN | LS | Proposed Algorithm |
|---|---|---|---|
| 3 | 1.83 m | 1.58 m | 1.41 m |
| 4 | 1.65 m | 1.37 m | 1.15 m |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Du, T.; Jiang, C. Indoor 3-D Localization Based on Received Signal Strength Difference and Factor Graph for Unknown Radio Transmitter. Sensors 2019, 19, 338. https://doi.org/10.3390/s19020338
Zhang L, Du T, Jiang C. Indoor 3-D Localization Based on Received Signal Strength Difference and Factor Graph for Unknown Radio Transmitter. Sensors. 2019; 19(2):338. https://doi.org/10.3390/s19020338
Chicago/Turabian StyleZhang, Liyang, Taihang Du, and Chundong Jiang. 2019. "Indoor 3-D Localization Based on Received Signal Strength Difference and Factor Graph for Unknown Radio Transmitter" Sensors 19, no. 2: 338. https://doi.org/10.3390/s19020338
APA StyleZhang, L., Du, T., & Jiang, C. (2019). Indoor 3-D Localization Based on Received Signal Strength Difference and Factor Graph for Unknown Radio Transmitter. Sensors, 19(2), 338. https://doi.org/10.3390/s19020338