A Novel Method for Extrinsic Calibration of Multiple RGB-D Cameras Using Descriptor-Based Patterns


Abstract
:1. Introduction
2. Method Overview
3. Detailed Methods
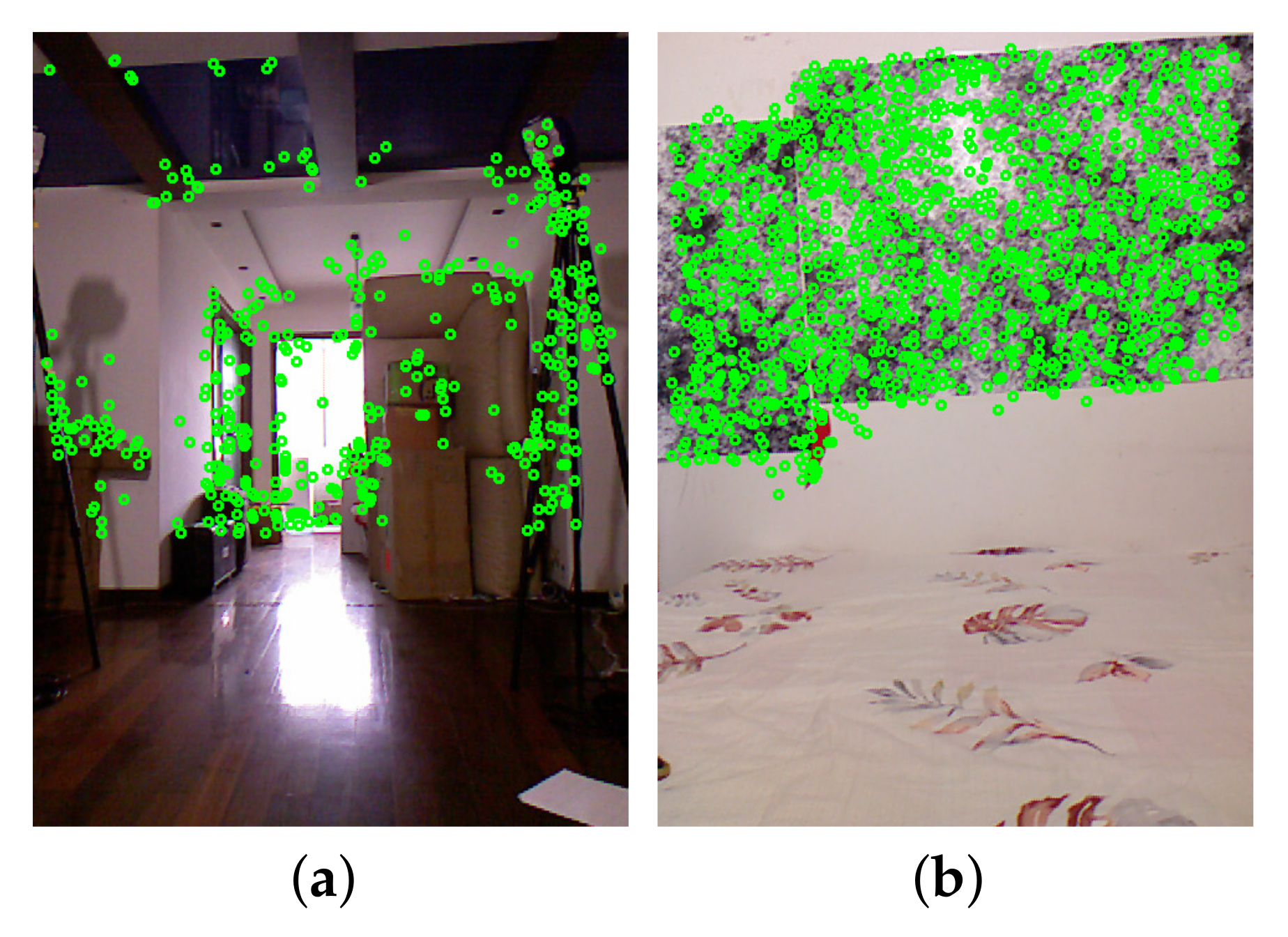
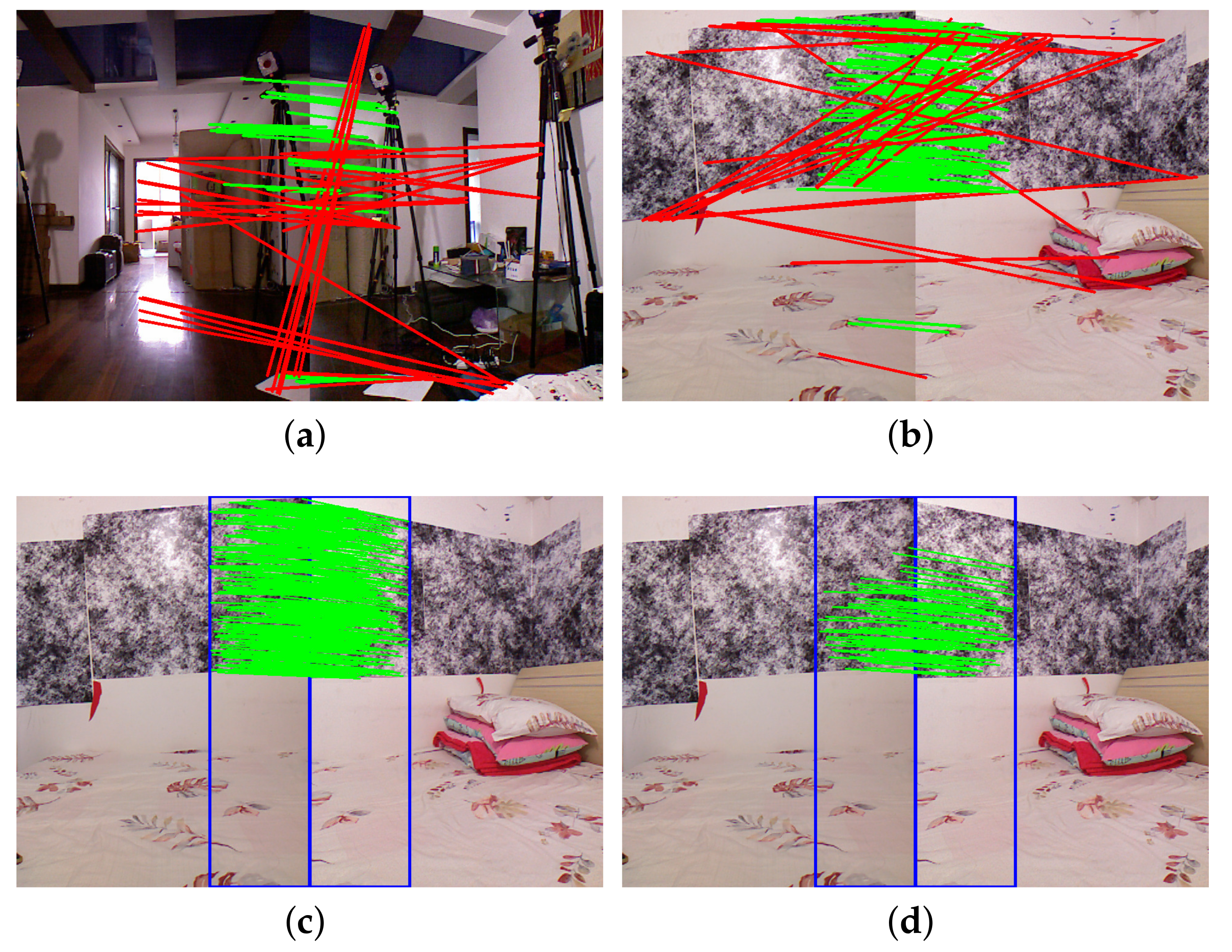
3.1. Keypoint Extraction
3.2. Estimate the Pose from 3D Point Sets
3.2.1. Align the Depth Map with the Color Image
3.2.2. Estimate the Pose
3.3. Pose Graph Optimization
4. Experimental Results
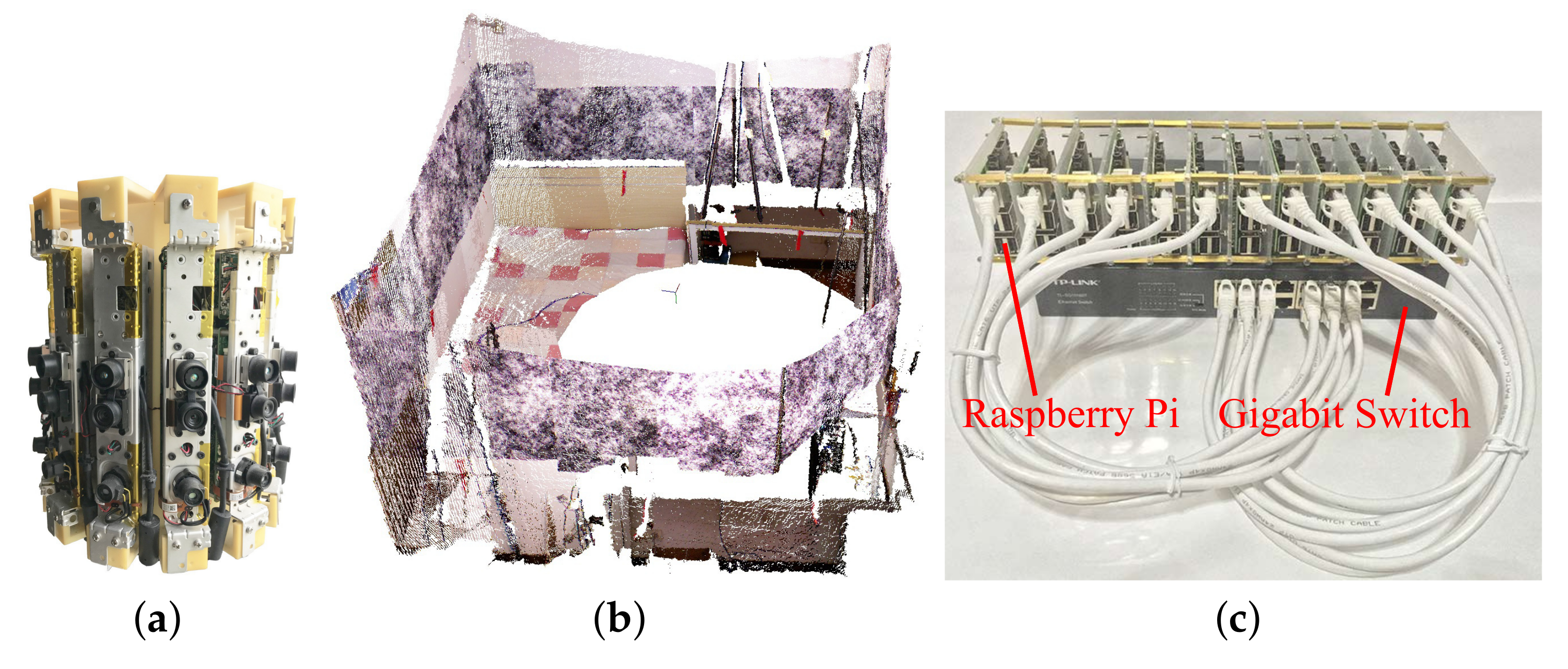
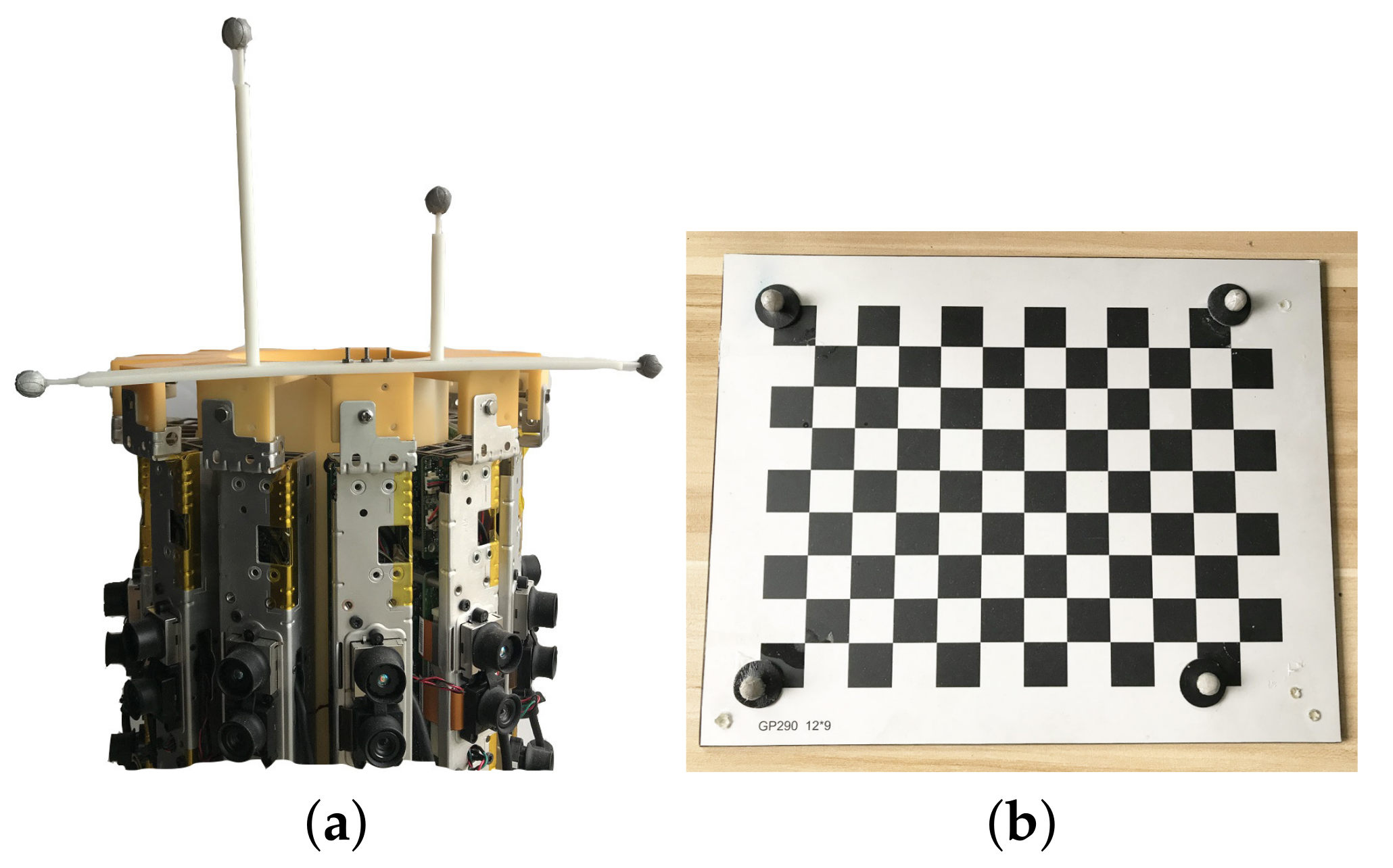
4.1. System Setup
4.2. Evaluation Metrics
4.2.1. Relative 2D Error (R2E)
4.2.2. Relative 3D Error (R3E)
4.2.3. Accumulated 3D Error (A3E)
4.3. Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Salas-Moreno, R.F.; Newcombe, R.A.; Strasdat, H.; Kelly, P.H.J.; Davison, A.J. SLAM++: Simultaneous Localisation and Mapping at the Level of Objects. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Portland, OR, USA, 23–28 June 2013. [Google Scholar]
- Newcombe, R.A.; Izadi, S.; Hilliges, O.; Molyneaux, D.; Kim, D.; Davison, A.J.; Kohi, P.; Shotton, J.; Hodges, S.; Fitzgibbon, A. KinectFusion: Real-time dense surface mapping and tracking. In Proceedings of the 2011 10th IEEE International Symposium on Mixed and Augmented Reality, Basel, Switzerland, 26–29 October 2011; pp. 127–136. [Google Scholar]
- Mur-Artal, R.; Tardos, J.D. ORB-SLAM2: An Open-Source SLAM System for Monocular, Stereo, and RGB-D Cameras. IEEE Trans. Robot. 2017, 33, 1255–1262. [Google Scholar] [CrossRef] [Green Version]
- Whelan, T.; Salas-Moreno, R.F.; Glocker, B.; Davison, A.J.; Leutenegger, S. ElasticFusion: Real-time dense SLAM and light source estimation. Int. J. Robot. Res. 2016, 35, 1697–1716. [Google Scholar] [CrossRef] [Green Version]
- Endres, F.; Hess, J.; Sturm, J.; Cremers, D.; Burgard, W. 3-D Mapping With an RGB-D Camera. IEEE Trans. Robot. 2017, 30, 177–187. [Google Scholar] [CrossRef]
- Yan, Z.; Mao, Y.; Liu, R. Dense Visual SLAM with Probabilistic Surfel Map. IEEE Trans. Vis. Comput. Gr. 2017, 23, 2389–2398. [Google Scholar] [CrossRef] [PubMed]
- Sturm, J.; Engelhard, N.; Endres, F.; Burgard, W.; Cremers, D. A Benchmark for the Evaluation of RGB-D SLAM Systems. In Proceedings of the International Conference on Intelligent Robot Systems (IROS), Algarve, Portugal, 7–12 October 2012. [Google Scholar]
- Zug, S.; Penzlin, F.; Dietrich, A.; Nguyen, T.T.; Albert, S. Are laser scanners replaceable by Kinect sensors in robotic applications? In Proceedings of the 2012 IEEE International Symposium on Robotic and Sensors Environments (ROSE), Magdeburg, Germany, 16–18 November 2012; pp. 144–149. [Google Scholar]
- Fernandez-Moral, E.; Gonzalez-Jimenez, J.; Rives, P.; Arevalo, V. Extrinsic calibration of a set of range cameras in 5 seconds without pattern. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 429–435. [Google Scholar]
- Rives, P. Scene structure registration for localization and mapping. Robot. Autonomous Syst. 2016, 75, 649–660. [Google Scholar] [Green Version]
- Gokhool, T.; Meilland, M.; Rives, P.; Fernández-Moral, E. A dense map building approach from spherical RGBD images. In Proceedings of the International Conference on Computer Vision Theory and Applications, Lisbon, Portugal, 5–8 January 2014; pp. 656–663. [Google Scholar]
- Gokhool, T.; Martins, R.; Rives, P.; Despre, N. A compact spherical RGBD keyframe-based representation. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 25–30 May 2015; pp. 4273–4278. [Google Scholar]
- Poreba, M.; Goulette, F. A robust linear feature-based procedure for automated registration of point clouds. Sensors 2015, 15, 1435–1457. [Google Scholar] [CrossRef] [PubMed]
- Perez-Yus, A.; Fernandez-Moral, E.; Lopez-Nicolas, G.; Guerrero, J.J.; Rives, P. Extrinsic calibration of multiple RGB-D cameras from line observations. IEEE Robot. Autom. Lett. 2018, 3, 273–280. [Google Scholar] [CrossRef]
- Schneider, S.; Luettel, T.; Wuensche, H.J. Odometry-based online extrinsic sensor calibration. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1287–1292. [Google Scholar]
- Brookshire, J.; Teller, S.J. Extrinsic Calibration from Per-Sensor Egomotion. Robot. Sci. Syst. 2012, 8, 504–512. [Google Scholar]
- Li, B.; Heng, L.; Koser, K.; Pollefeys, M. A multiple-camera system calibration toolbox using a feature descriptor-based calibration pattern. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 1301–1307. [Google Scholar]
- Juan Luo, G.O. A comparison of sift, pca-sift and surf. Int. J. Image Process. 2009, 3, 143–152. [Google Scholar]
- Gao, X.; Zhang, T.; Liu, Y.; Yan, Q. 14 Lectures on Visual SLAM: From Theory to Practice; Publishing House of Electronics Industry: Beijing, China, 2017. [Google Scholar]
- Donghwa, L.; Hyun, M. Solution to the SLAM problem in low dynamic environments using a pose graph and an RGB-D sensor. Sensors 2014, 14, 12467–12496. [Google Scholar]
- Kummerle, R.; Grisetti, G.; Strasdat, H.; Konolige, K.; Burgard, W. g2o: A General Framework for Graph Optimization. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar]
- Khoshelham, K.; Elberink, S.O. Accuracy and Resolution of Kinect Depth Data for Indoor Mapping Applications. Sensors 2012, 12, 1437–1454. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Engel, J.; Koltun, V.; Cremers, D. Direct sparse odometry. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 611–625. [Google Scholar] [CrossRef] [PubMed]
- Forster, C.; Pizzoli, M.; Scaramuzza, D. SVO: Fast semi-direct monocular visual odometry. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 15–22. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| / | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|
| No. of matched keypoints before RANSAC | 62 | 235 | 416 | 652 | 1064 | 1316 | 1379 | 1464 | 1535 |
| No. of matched keypoints after RANSAC | 11 | 19 | 21 | 22 | 21 | 22 | 21 | 21 | 21 |
| R2E (pixel) | 1.10 | 1.08 | 1.07 | 1.07 | 1.19 | 1.17 | 1.17 | 1.17 | 1.15 |
| R3E (mm) | 4.01 | 5.05 | 4.67 | 5.58 | 4.96 | 5.11 | 5.32 | 5.21 | 5.26 |
| Re-Projection Error Threshold | 0.1 | 0.2 | 0.5 | 1.0 | 1.5 | 2.0 |
|---|---|---|---|---|---|---|
| No. of matched keypoints before RANSAC | 62 | 62 | 62 | 62 | 62 | 62 |
| No. of matched keypoints after RANSAC | 11 | 19 | 38 | 47 | 52 | 52 |
| R2E (pixel) | 1.10 | 0.96 | 1.02 | 1.03 | 1.06 | 1.06 |
| R3E (mm) | 4.01 | 4.68 | 5.03 | 5.26 | 5.33 | 5.33 |
| Index | Before | After | R2E (pixel) | R3E (mm) |
|---|---|---|---|---|
| 1 | 83 | 13 | 1.23 | 8.6 |
| 2 | 119 | 18 | 0.84 | 7.7 |
| 3 | 32 | 7 | 0.78 | 2.1 |
| 4 | 44 | 12 | 0.94 | 5.1 |
| 5 | 88 | 12 | 0.92 | 5.0 |
| 6 | 27 | 9 | 0.79 | 2.6 |
| 7 | 65 | 10 | 1.05 | 1.4 |
| 8 | 70 | 3 | 2.39 | 0.8 |
| 9 | 80 | 12 | 1.01 | 3.5 |
| 10 | 57 | 12 | 0.95 | 2.9 |
| 11 | 12 | 5 | 1.27 | 4.1 |
| 12 | 64 | 16 | 0.98 | 3.8 |
| Average | 62 | 11 | 1.1 | 3.97 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Li, H.; Liu, X.; Luo, J.; Xie, S.; Sun, Y. A Novel Method for Extrinsic Calibration of Multiple RGB-D Cameras Using Descriptor-Based Patterns. Sensors 2019, 19, 349. https://doi.org/10.3390/s19020349
Liu H, Li H, Liu X, Luo J, Xie S, Sun Y. A Novel Method for Extrinsic Calibration of Multiple RGB-D Cameras Using Descriptor-Based Patterns. Sensors. 2019; 19(2):349. https://doi.org/10.3390/s19020349
Chicago/Turabian StyleLiu, Hang, Hengyu Li, Xiahua Liu, Jun Luo, Shaorong Xie, and Yu Sun. 2019. "A Novel Method for Extrinsic Calibration of Multiple RGB-D Cameras Using Descriptor-Based Patterns" Sensors 19, no. 2: 349. https://doi.org/10.3390/s19020349
APA StyleLiu, H., Li, H., Liu, X., Luo, J., Xie, S., & Sun, Y. (2019). A Novel Method for Extrinsic Calibration of Multiple RGB-D Cameras Using Descriptor-Based Patterns. Sensors, 19(2), 349. https://doi.org/10.3390/s19020349