Unconstrained Monitoring Method for Heartbeat Signals Measurement using Pressure Sensors Array

Abstract
:1. Introduction
2. Experiment
2.1. Requirements for the Subjects
2.2. Experiment Equipment and Setting
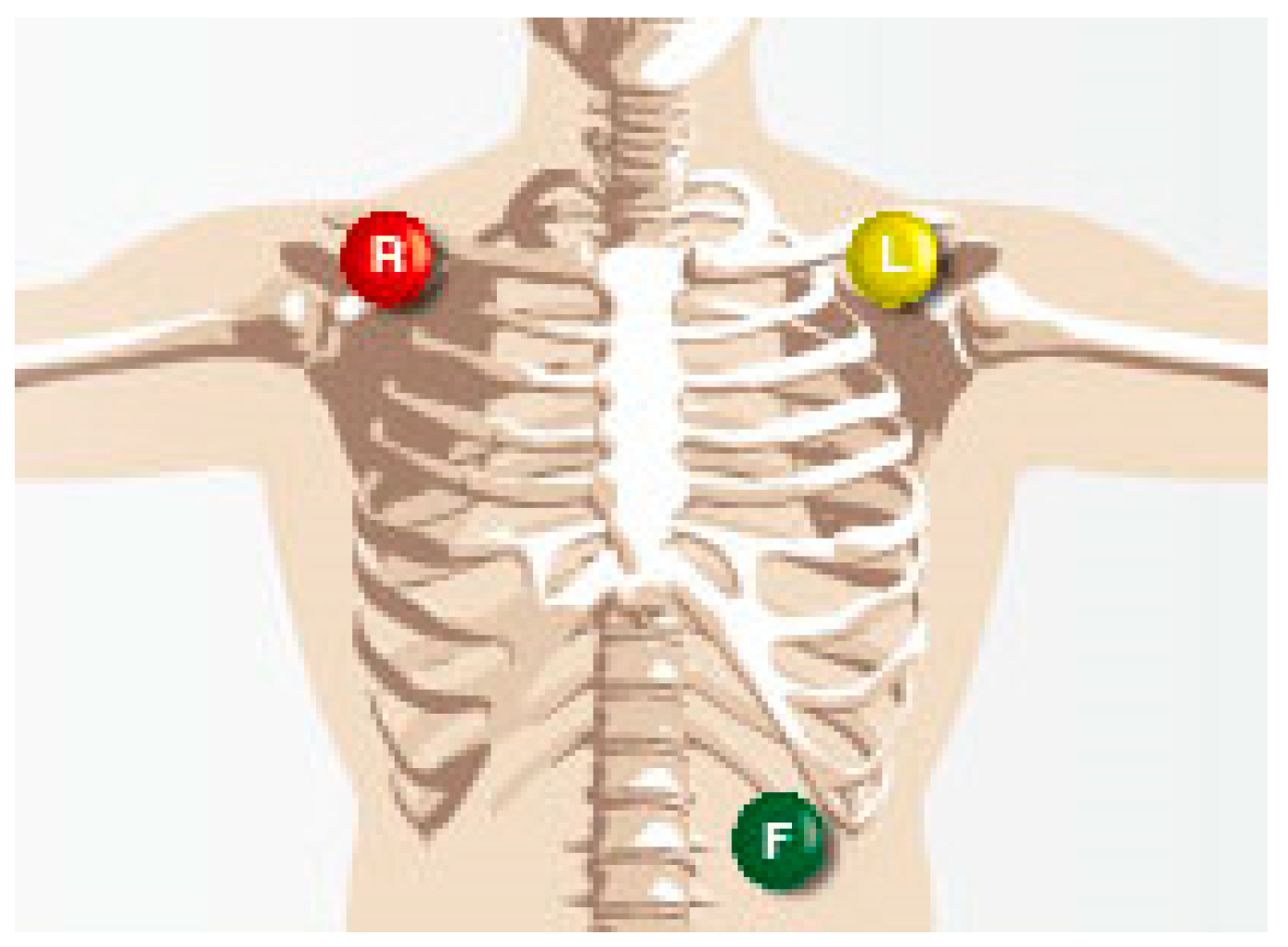
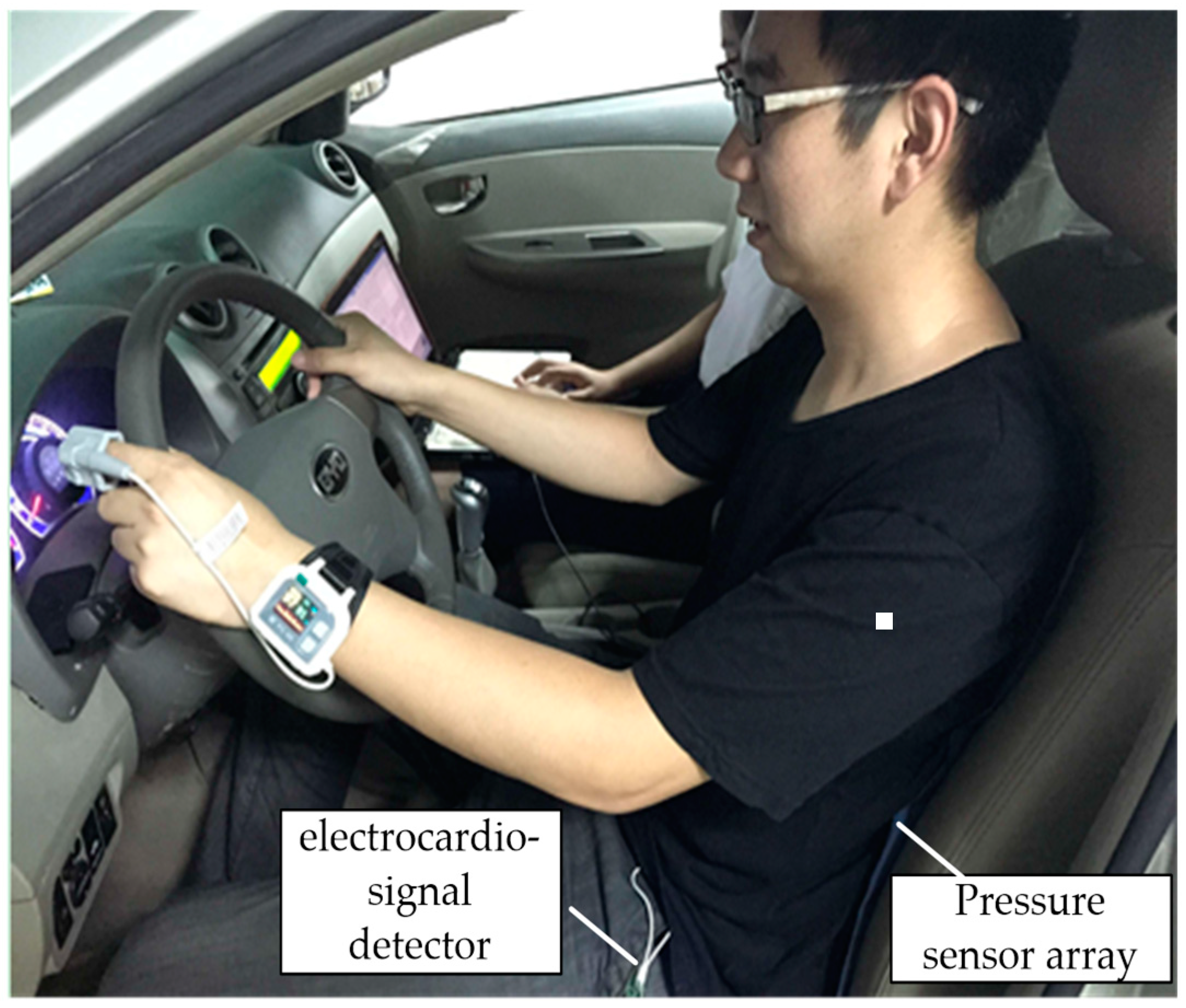
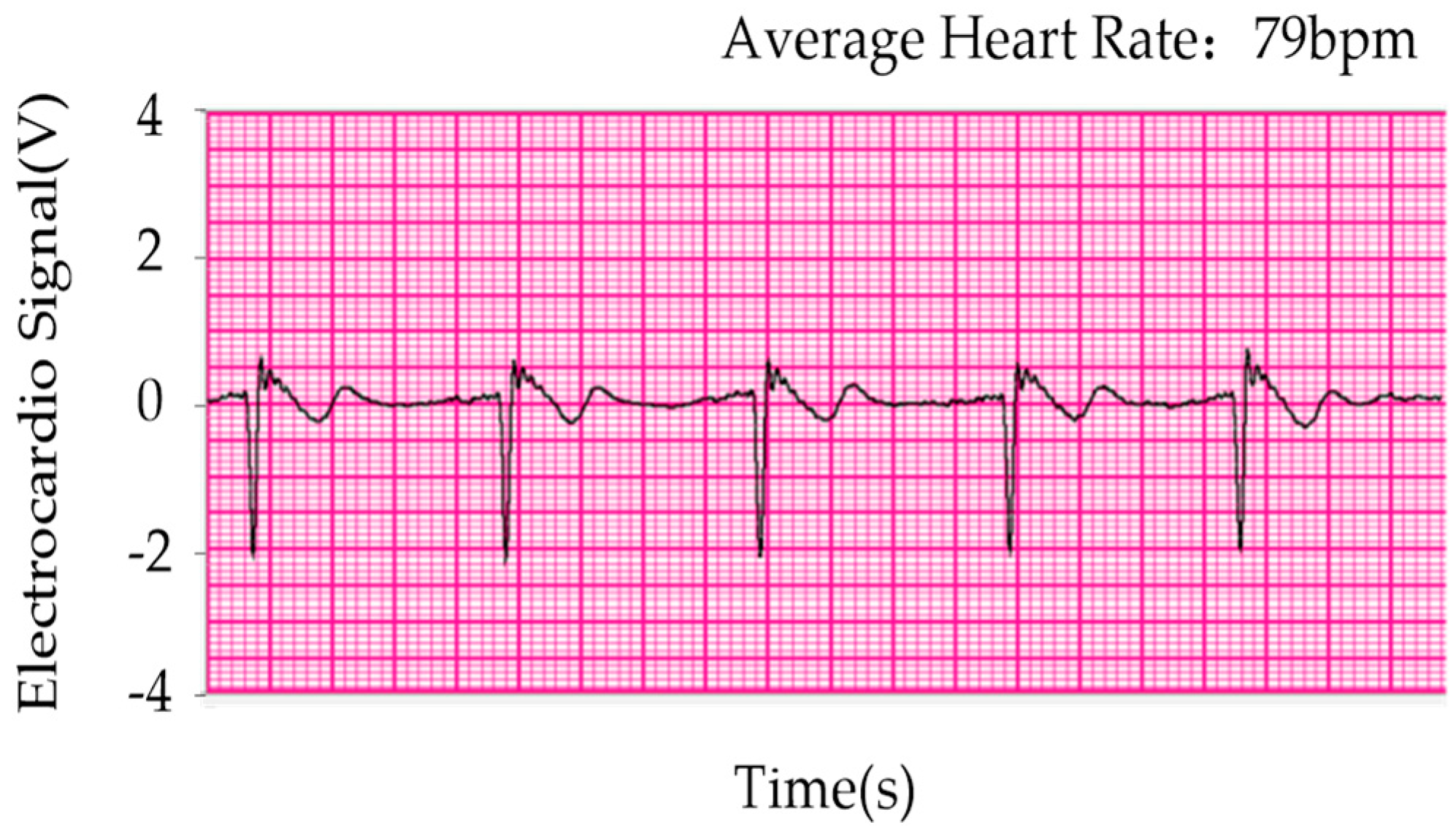
2.2.1. Equipment for Obtaining Electrocardio-Signals
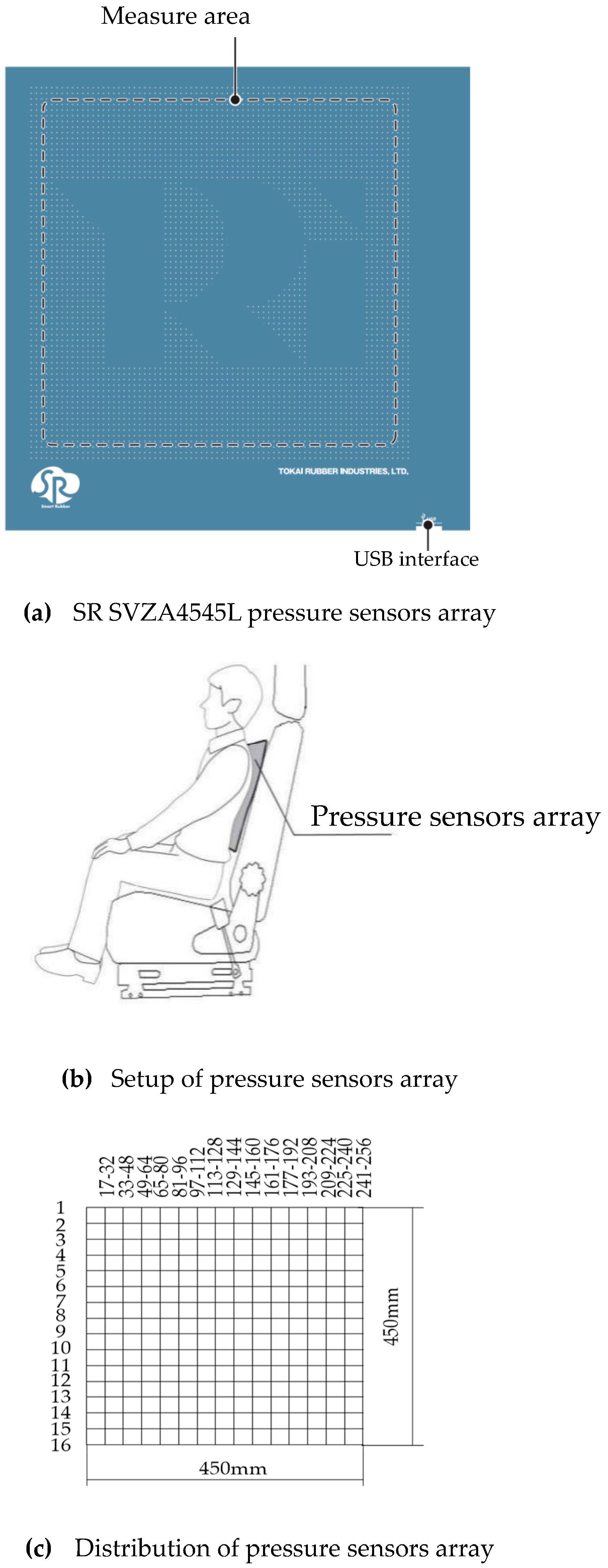
2.2.2. Equipment for Obtaining Pressure Signals
2.3. Experimental Program and Data Acquisition
3. Driving Posture Calcification by Extreme Learning Machine
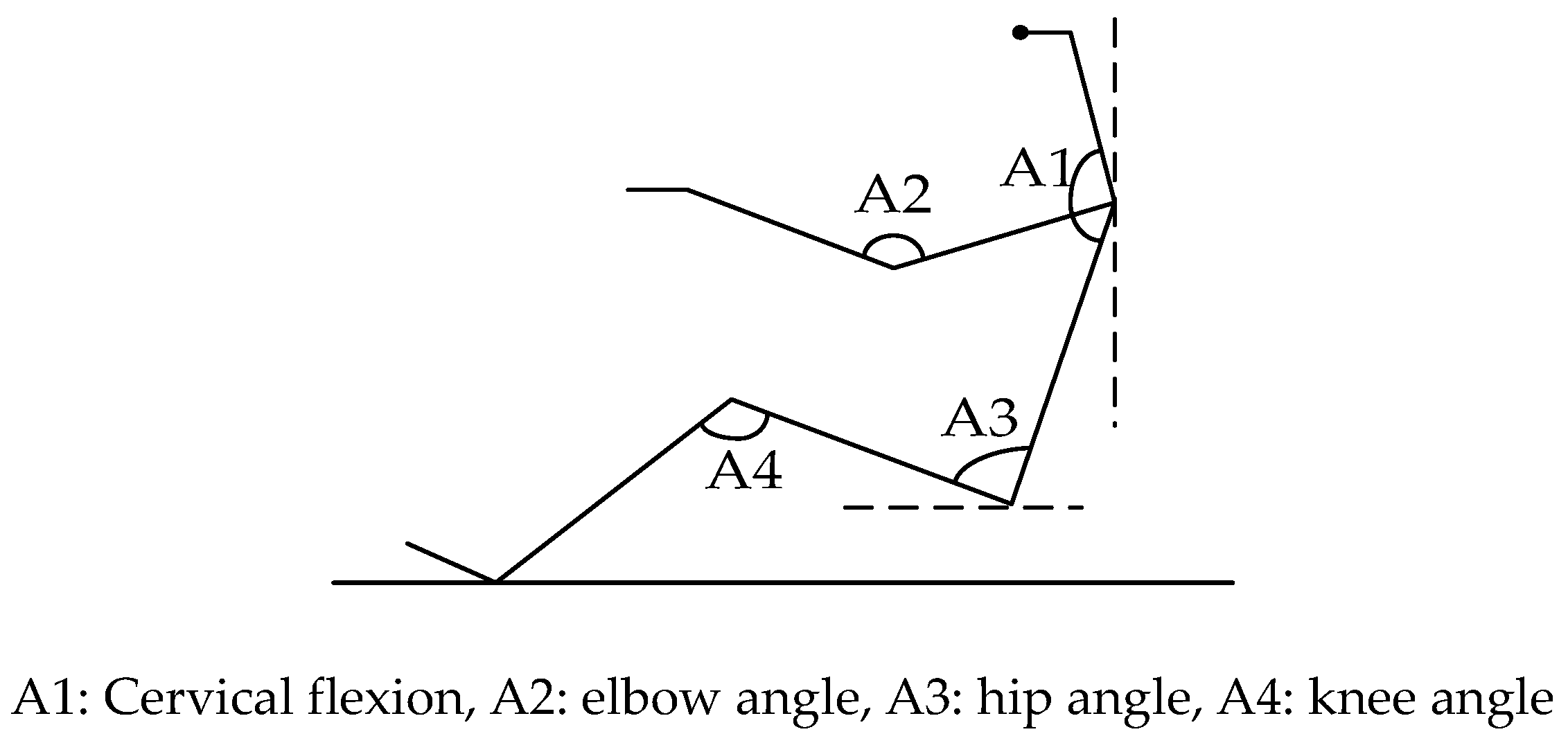
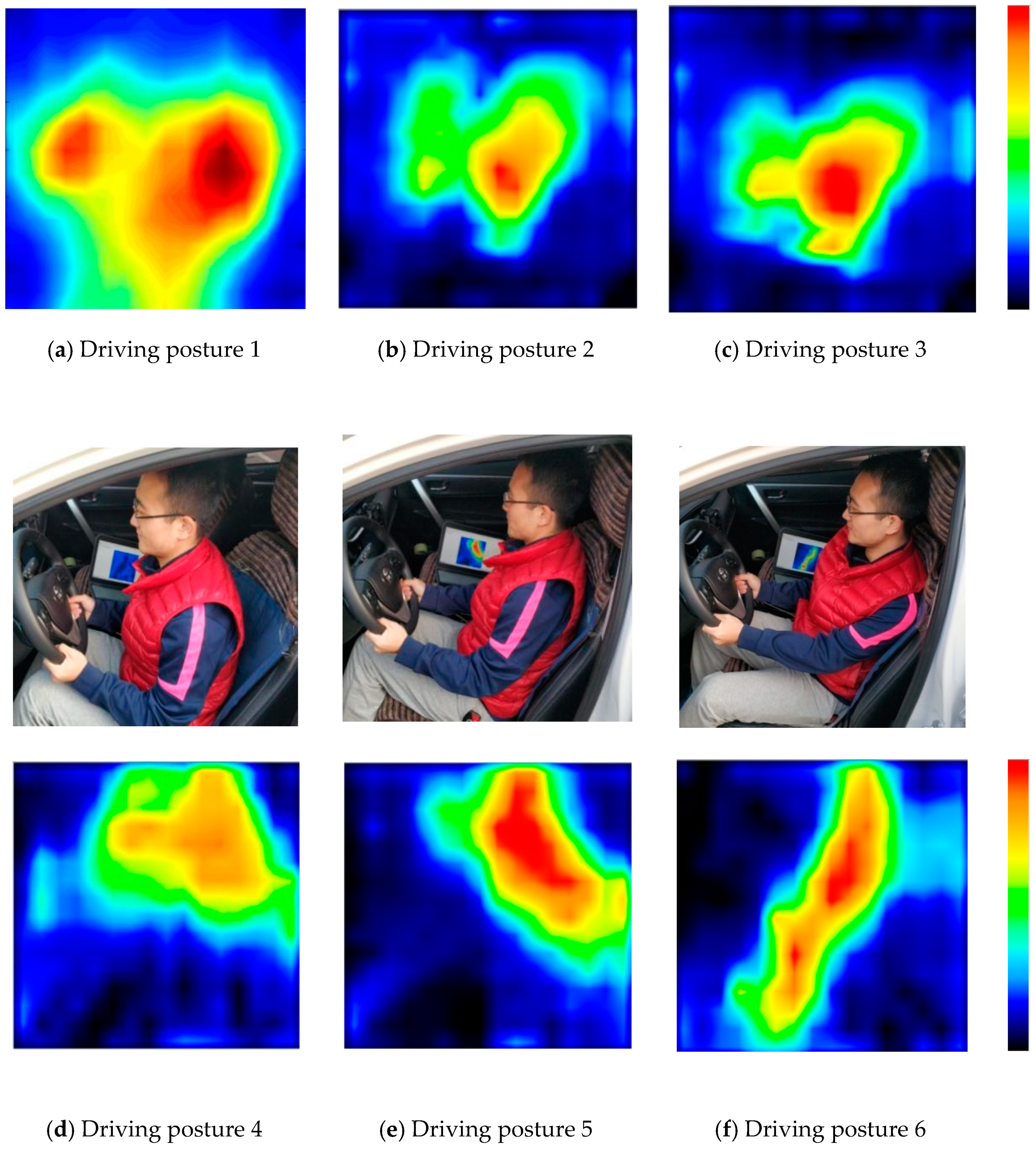
3.1. Selection of Typical Driving Posture
3.2. Brief Review of Extreme Learning Machine
- Assign input weight, A = [a1, a2, …, ], and bias, B = [b1, b2, …, ], randomly.
- Calculate the hidden layer output matrix, H.
- Calculate the output weight, β: [23].
3.3. Feature Extraction of the Pressure Distribution Image
3.3.1. Image Processing before Feature Extraction
- (1)
- Pressure distribution images were treated by gray level transformation;
- (2)
- Noise reductions were carried out by the median filtering method;
- (3)
- Gray images were converted to a binary one by the suitable threshold value. Additionally, the edges were detected by the binary image.
- (4)
- The minimum enclosing rectangles were extracted.
3.3.2. Feature Parameters Selection and Calculation
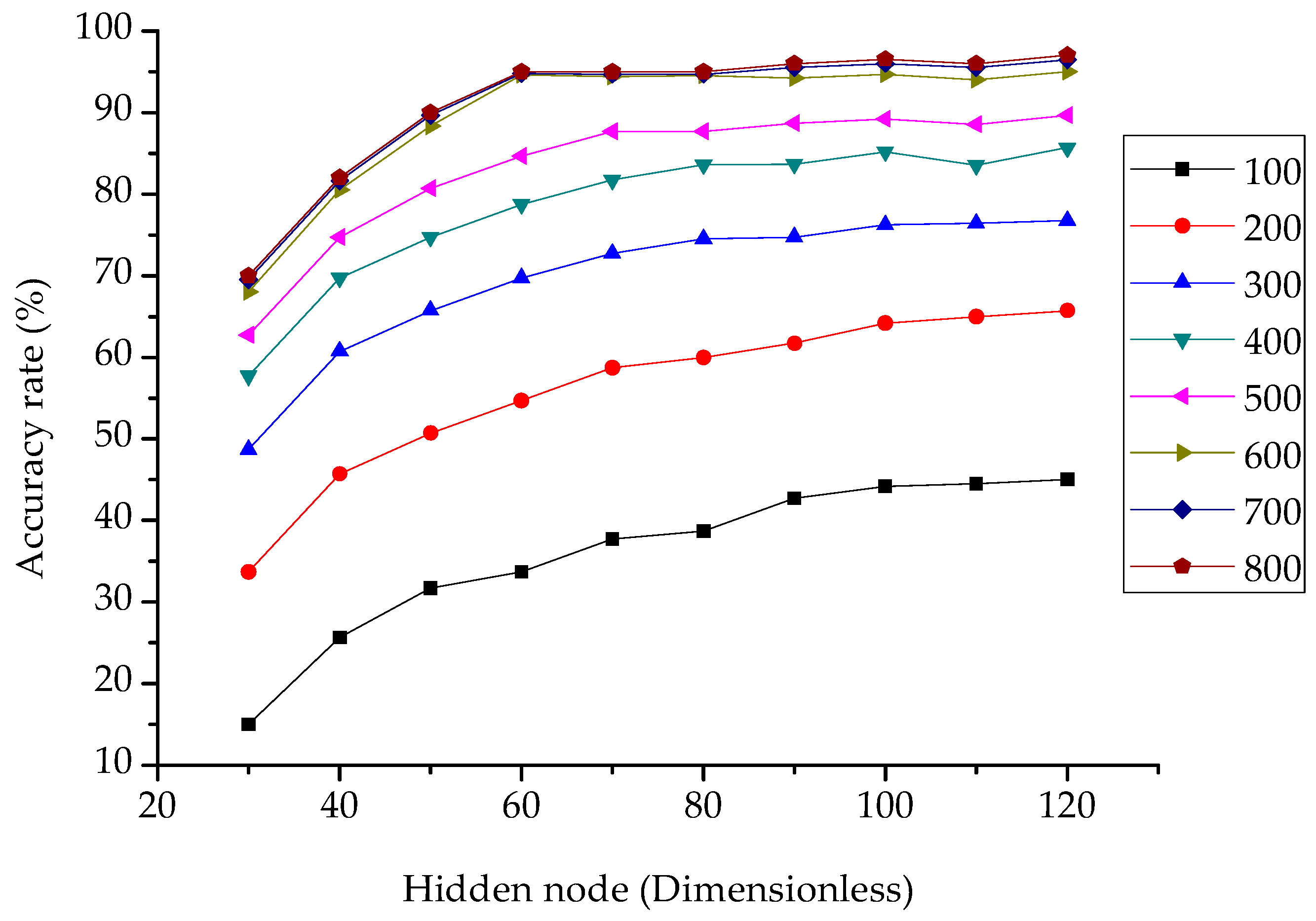
3.4. Accuracy Evaluation of ELM by Training Samples Size and Hidden Node Selection
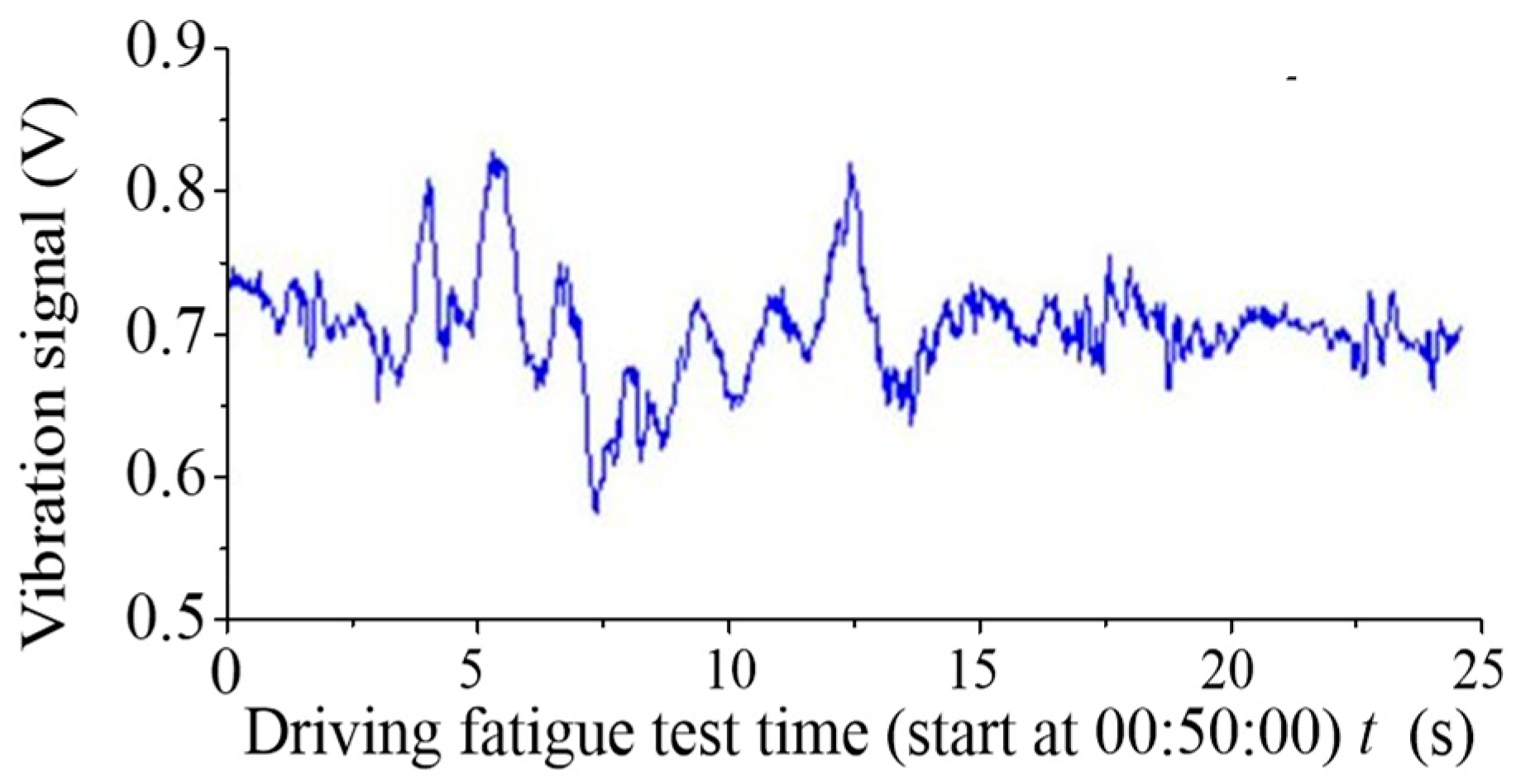
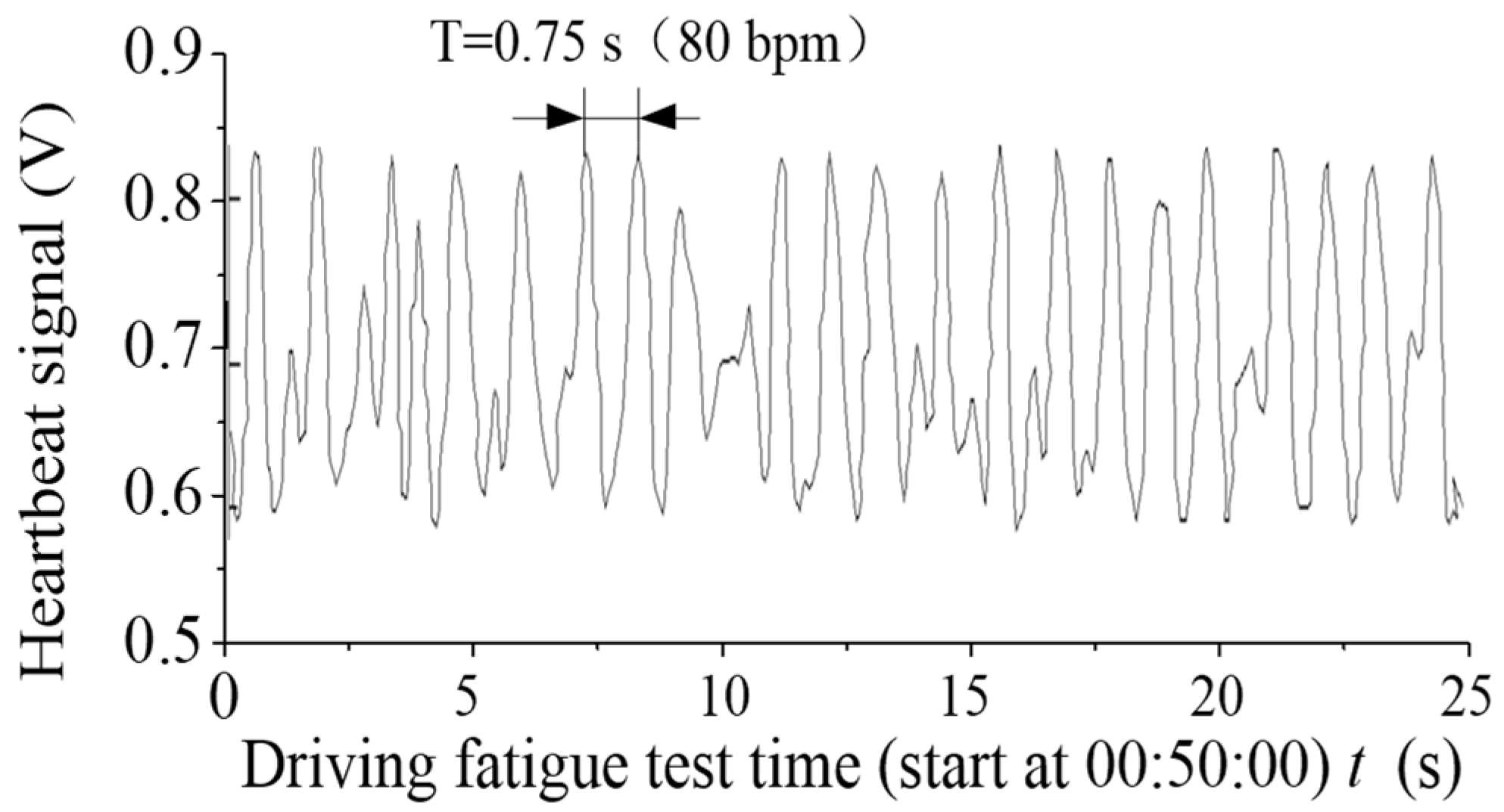
4. Extraction of Heartbeat Signals from the Pressure Sensor Matrix
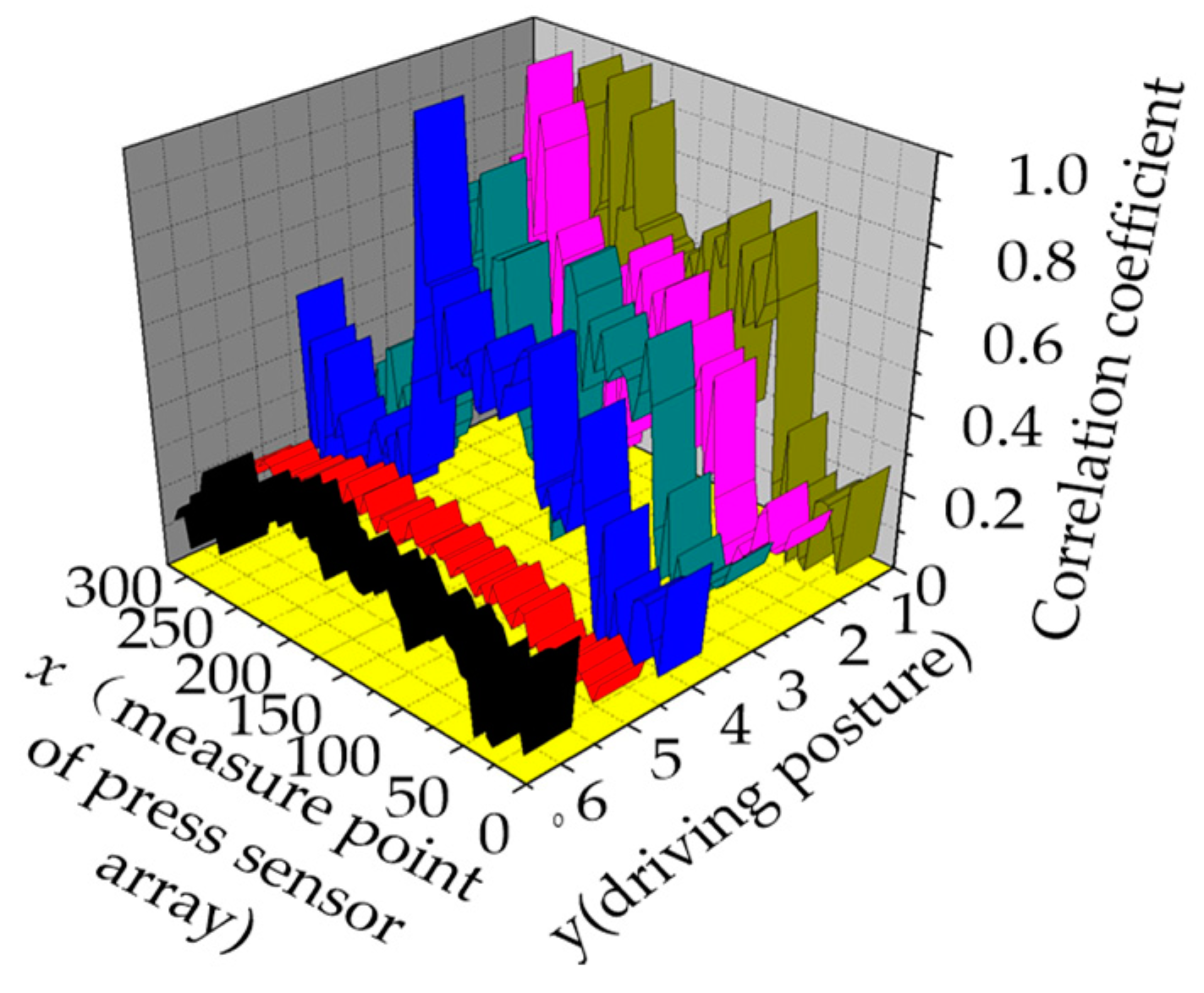
5. Correlation Analysis of Heartbeat Signals and Electrocardio-Signals
6. Accuracy Analysis of Heartbeat Signal Extraction in Varied Sitting Postures
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- World Health Organization. Global status report on road safety 2015. Inj. Prev. 2015, 15, 286. [Google Scholar] [CrossRef]
- May, J.F.; Baldwin, C.L. Driver fatigue: The importance of identifying causal factors of fatigue when considering detection and countermeasure technologies. Transp. Res. Part F Traffic Psychol. Behav. 2009, 12, 218–224. [Google Scholar] [CrossRef]
- Jiang, Y.X.; Guo, S.J.; Deng, S.P. Denoising and Chaotic Feature Extraction of Electrocardial Signals for Driver Fatigue Detection by Kolmogorov Entropy. J. Dyn. Syst. Meas. Control 2018, 141, 245–258. [Google Scholar] [CrossRef]
- Ko, M.K.; Feng, Y.C. Driver’s Fatigue Detection System and Method. U.S. Patent 9402577, 2016. [Google Scholar]
- Devi, B.A.; Kalaivani, A. Fuzzy Neural Network based Real-Time Driver Fatigue Detection and Warning System using EEG Waves. Asian J. Res. Soc. Sci. Humanit. 2016, 6, 791–812. [Google Scholar] [CrossRef]
- Hostens, I.; Ramon, H. Assessment of muscle fatigue in low level monotonous task performance during car driving. J. Electromyogr. Kinesiol. 2005, 15, 266–274. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.S.; Lin, C.W. A k-nearest-neighbor classifier with heart rate variability feature-based transformation algorithm for driving stress recognition. Neurocomputing 2013, 116, 136–143. [Google Scholar] [CrossRef]
- Kranjec, J.; Begus, S.; Drnovsek, J.; Geršak, G. Novel Methods for Noncontact Heart Rate Measurement: A Feasibility Study. IEEE Trans. Instrum. Meas. 2014, 63, 838–847. [Google Scholar] [CrossRef]
- Lim, E.; Lee, H.K.; Myoung, H.S.; Lee, K.J. Development of a noncontact heart rate monitoring system for sedentary behavior based on an accelerometer attached to a chair. Physiol. Meas. 2015, 36, 61–70. [Google Scholar] [CrossRef] [PubMed]
- Zhang, D.; Wang, H.; Wu, D. Toward Centimeter-Scale Human Activity Sensing with Wi-Fi Signals. Computer 2017, 50, 48–57. [Google Scholar] [CrossRef]
- Tomimori, H.; Sano, S.; Nakano, Y. Development of adaptive noise reduction technology for in-vehicle heartbeat sensor. In Proceedings of the 2011 7th International Conference on Intelligent Sensors, Adelaide, Australia, 6–9 December 2011; Volume 12, pp. 25–29. [Google Scholar] [CrossRef]
- Eilebrecht, B.; Wartzek, T.; Lem, J. Capacitive electrocardiogram measurement system in the driver seat. ATZ Worldw. 2011, 113, 50–55. [Google Scholar] [CrossRef]
- Chen, S.; Wu, N.; Ma, L.; Lin, S.; Yuan, F.; Xu, Z.; Li, W.; Wang, B.; Zhou, J. Non-contact heartbeat and respiration monitoring based on hollow-microstructure self-powered pressure sensor. ACS Appl. Mater. Interfaces 2018, 50, 48–57. [Google Scholar] [CrossRef]
- Tohara, T.; Katayama, M.; Takajyo, A.; Inoue, K.; Shirakawa, S.; Kitado, M.; Takahashi, T.; Nishimura, Y. Time frequency analysis of biological signals during sleep. In Proceedings of the SICE Annual Conference, Takamatsu, Japan, 17–20 September 2007; pp. 1925–1929. [Google Scholar] [CrossRef]
- Zuckerwar, A.; Pretlow, R.; Stoughton, J.; Baker, D.A. Development of a piezopolymer pressure sensor for a portable fetal heart rate monitor. IEEE Trans. Biomed. Eng. 2002, 40, 963–969. [Google Scholar] [CrossRef] [PubMed]
- Foubert, N.; Mckee, A.; Goubran, R.; Knoefel, F. Lying and sitting posture recognition and transition detection using a pressure sensor array. In Proceedings of the IEEE International Symposium on Medical Measurements & Applications, Budapest, Hungary, 18–19 May 2012; pp. 25–29. [Google Scholar] [CrossRef]
- She, J.; Nakamura, H.; Imani, J.; Ohyama, Y.; Hashimoto, H.; Wu, M. Verification of relationship between heart rate and body movement for fatigue estimation. In Proceedings of the IEEE International Conference on Industrial Informatics, Porto Alegre, Brazil, 27–30 July 2014. [Google Scholar] [CrossRef]
- Zhao, C.; Gao, Y.; He, J.; Lian, J. Recognition of driving postures by multiwavelet transform and multilayer perceptron classifier. Eng. Appl. Artif. Intell. 2012, 25, 1677–1686. [Google Scholar] [CrossRef]
- Yan, C.; Zhang, B.; Coenen, F. Driving posture recognition by convolutional neural networks. In Proceedings of the International Conference on Natural Computation, Zhangjiajie, China, 15–17 August 2015; Volume 10, pp. 103–114. [Google Scholar] [CrossRef]
- Wu, Q.; Luo, S.; Sun, S. A Computer-Aided Driving Posture Prediction System Based on Driver Comfort. In Proceedings of the International Conference on Advances in Artificial Reality & Tele-Existence, Hangzhou, China, 29 November–1 December 2006; pp. 1088–1097. [Google Scholar] [CrossRef]
- Huang, G.B.; Zhu, Q.Y.; Siew, C.K. Extreme learning machine: Theory and applications. Neurocomputing 2006, 70, 489–501. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.L.; Cheng, Y.; Li, W.; Chen, J.B. Hyperspectral Image Classification by AdaBoost Weighted Composite Kernel Extreme Learning Machines. Neurocomputing 2018, 275, 1725–1733. [Google Scholar] [CrossRef]
- Song, Y.; Zhang, S.; He, B.; Sha, Q.; Shen, Y.; Yan, T.; Nian, R.; Amaury, L. Gaussian derivative models and ensemble extreme learning machinefor texture imageclassification. Neurocomputing 2018, 277, 53–64. [Google Scholar] [CrossRef]
- Dai, M. Research on Integrated Extreme Learning Machine for Image Target Recognition. Master’s Thesis, Shenyang University of Science & Engineering, Shen Yang, China, May 2017. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Postural Angle | Range of Comfort (°) | Driving Posture 1 (°) | Driving Posture 2 (°) | Driving Posture 3 (°) | Driving Posture 4 (°) |
|---|---|---|---|---|---|
| A1: Cervical Flexion | 130–160 | 145–155 | 130–135 | 135–145 | 155–160 |
| A2: Elbow Angle | 92–153 | 115–120 | 114–120 | 116–122 | 112–116 |
| A3: Hip Angle | 99–115 | 102–106 | 98–102 | 102–108 | 109–110 |
| A4: Knee Angle | 112–139 | 124–130 | 124–130 | 124–130 | 124–130 |
| Sitting Position | Heartbeat Signals Can Be Extracted | Monitoring Point | Correlation Coefficient |
|---|---|---|---|
| driving posture 1 | √ | 181 | 0.99 |
| driving posture 2 | √ | 186 | 0.92 |
| driving posture 3 | √ | 202 | 0.94 |
| driving posture 4 | √ | 185 | 0.89 |
| driving posture 5 | × | × | × |
| driving posture 6 | × | × | × |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, Y.; Deng, S.; Sun, H.; Qi, Y. Unconstrained Monitoring Method for Heartbeat Signals Measurement using Pressure Sensors Array. Sensors 2019, 19, 368. https://doi.org/10.3390/s19020368
Jiang Y, Deng S, Sun H, Qi Y. Unconstrained Monitoring Method for Heartbeat Signals Measurement using Pressure Sensors Array. Sensors. 2019; 19(2):368. https://doi.org/10.3390/s19020368
Chicago/Turabian StyleJiang, Yongxiang, Sanpeng Deng, Hongchang Sun, and Yuming Qi. 2019. "Unconstrained Monitoring Method for Heartbeat Signals Measurement using Pressure Sensors Array" Sensors 19, no. 2: 368. https://doi.org/10.3390/s19020368
APA StyleJiang, Y., Deng, S., Sun, H., & Qi, Y. (2019). Unconstrained Monitoring Method for Heartbeat Signals Measurement using Pressure Sensors Array. Sensors, 19(2), 368. https://doi.org/10.3390/s19020368