Clustering Cloud-Like Model-Based Targets Underwater Tracking for AUVs


Abstract
:1. Introduction
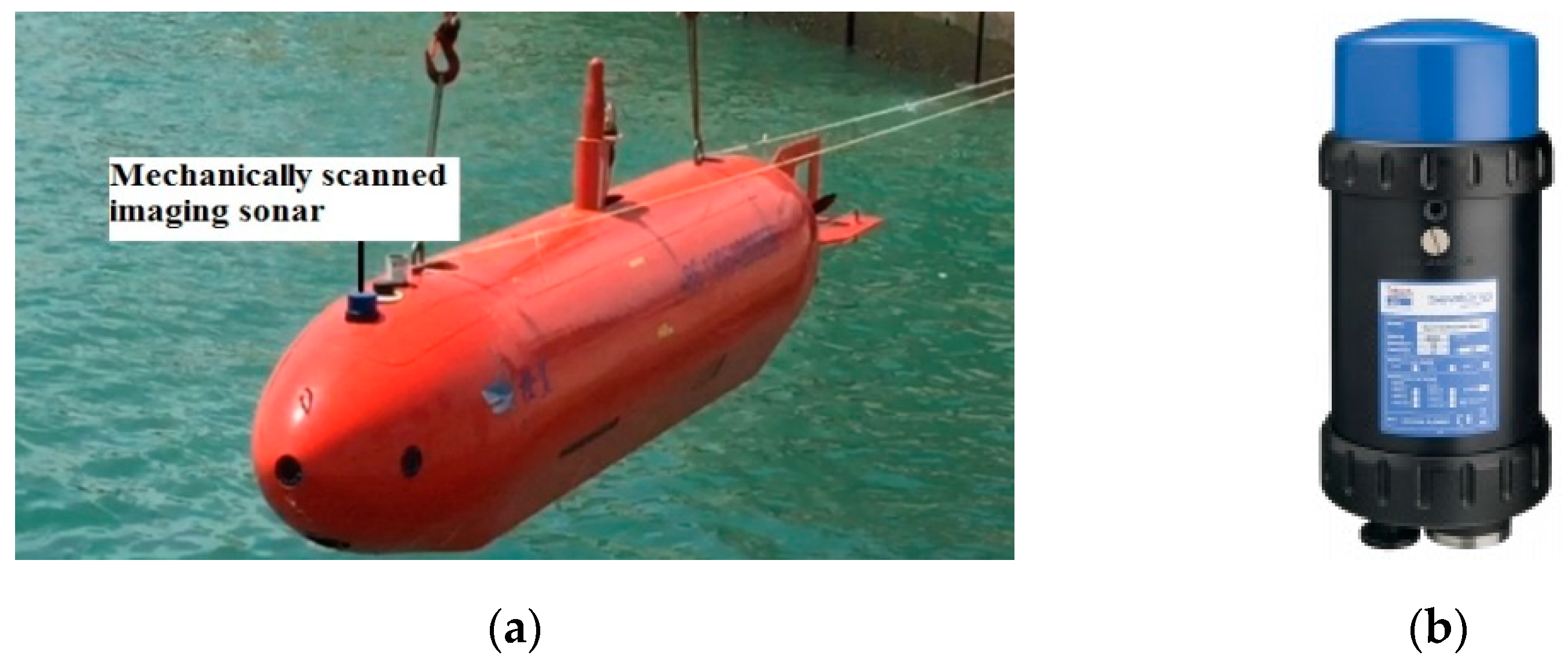
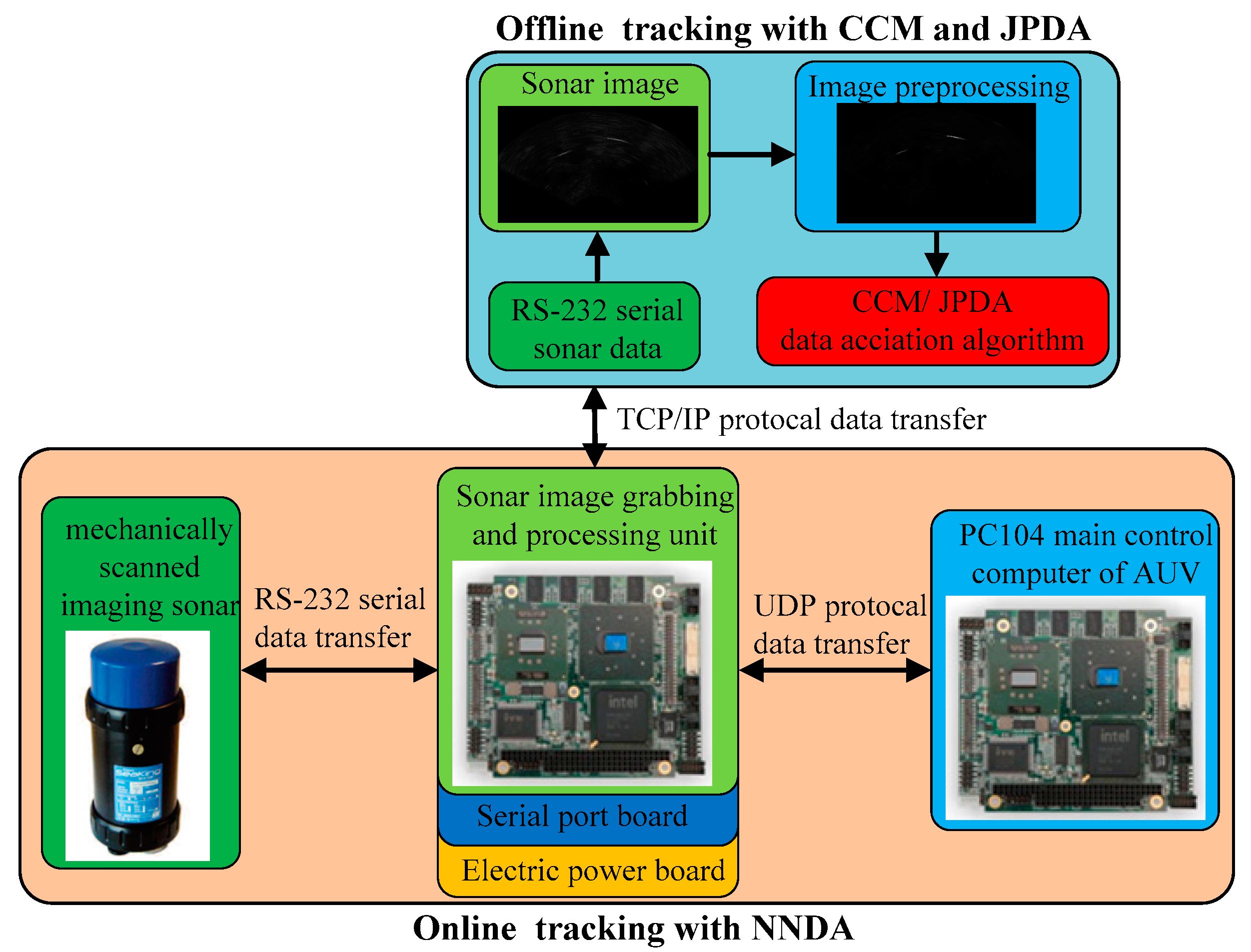
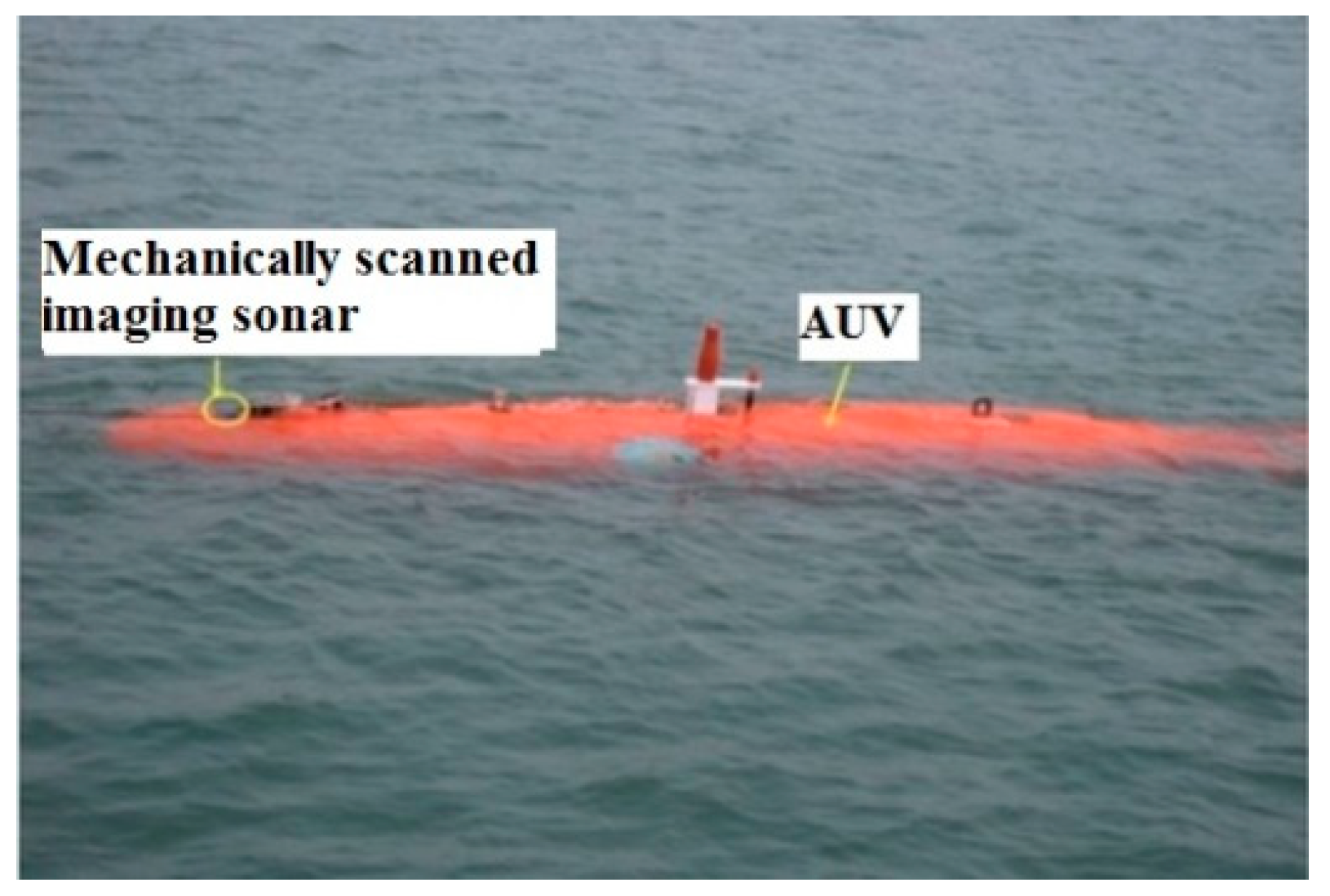
2. Hardware Architecture
3. Methodology
3.1. The Clustering Algorithm Based on the Cloud-Like Model
3.2. Multi-Target Data Association Algorithm Based on the C-Means Clustering Cloud-Like Model
4. Sea Trail Experiment Results and Discussion
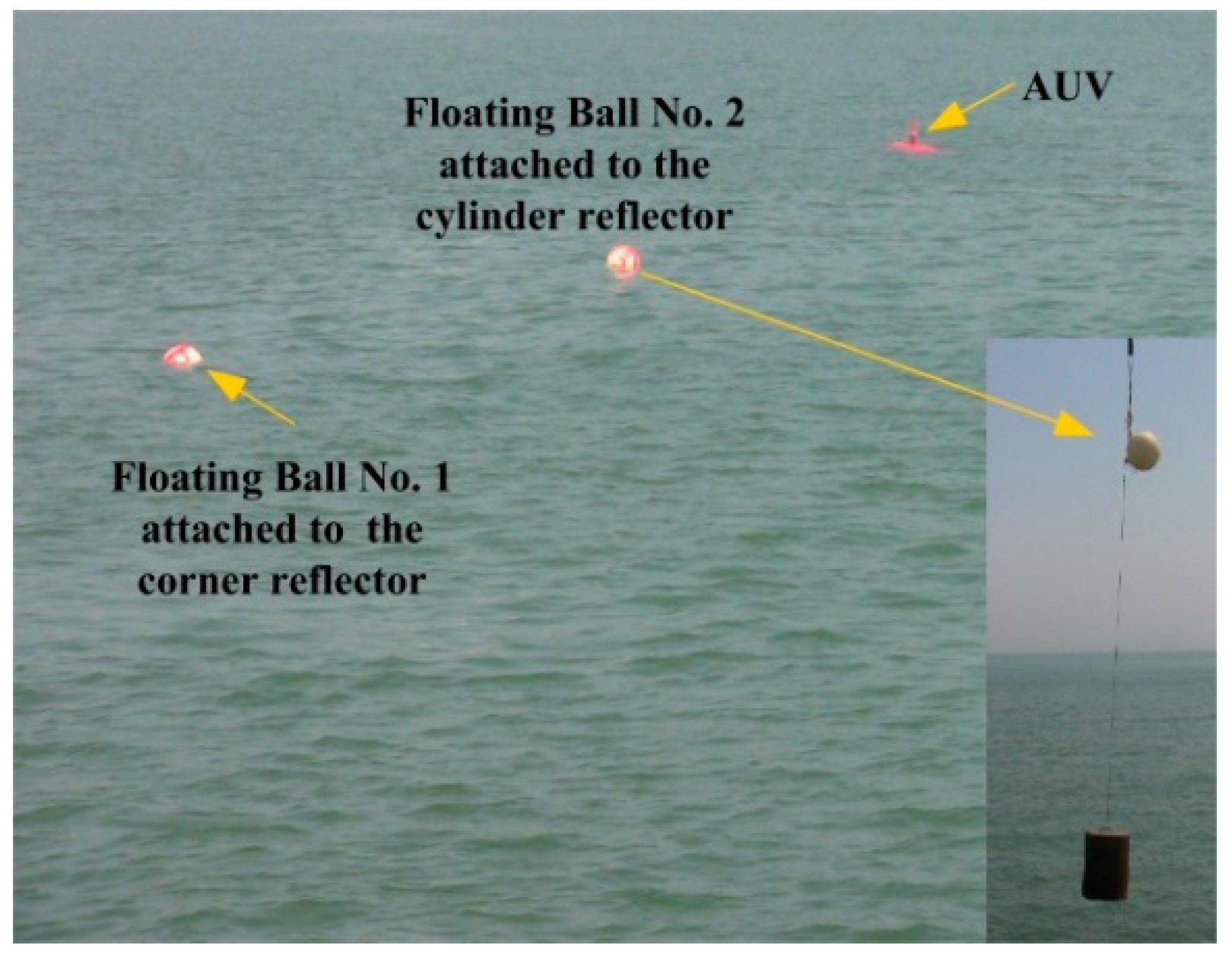
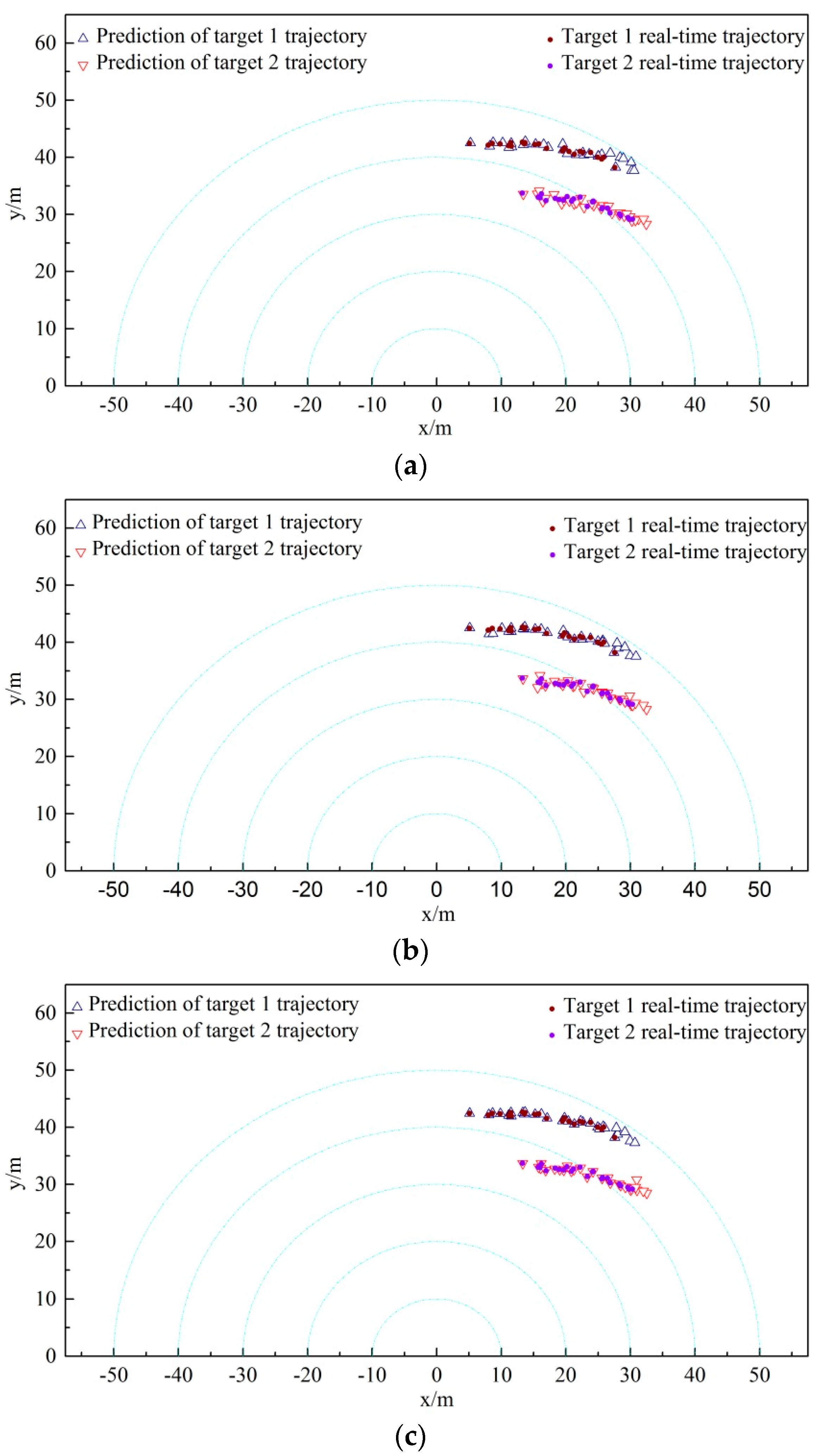
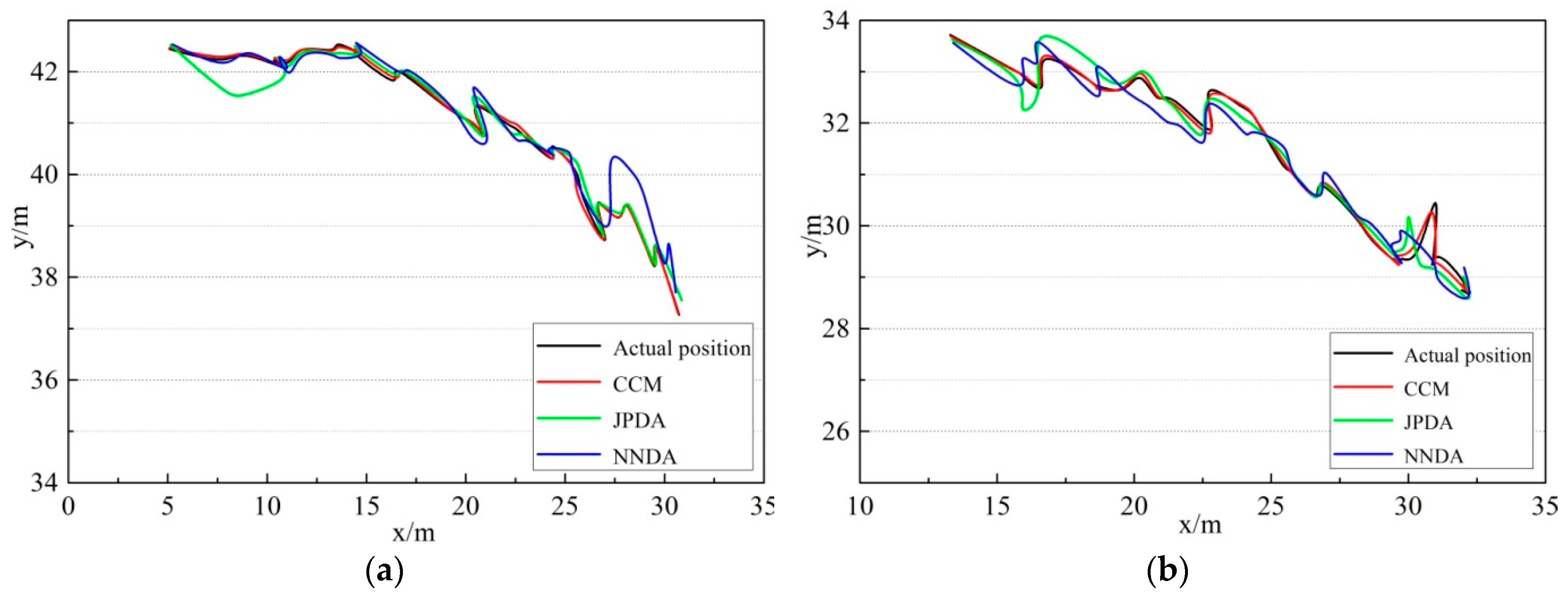
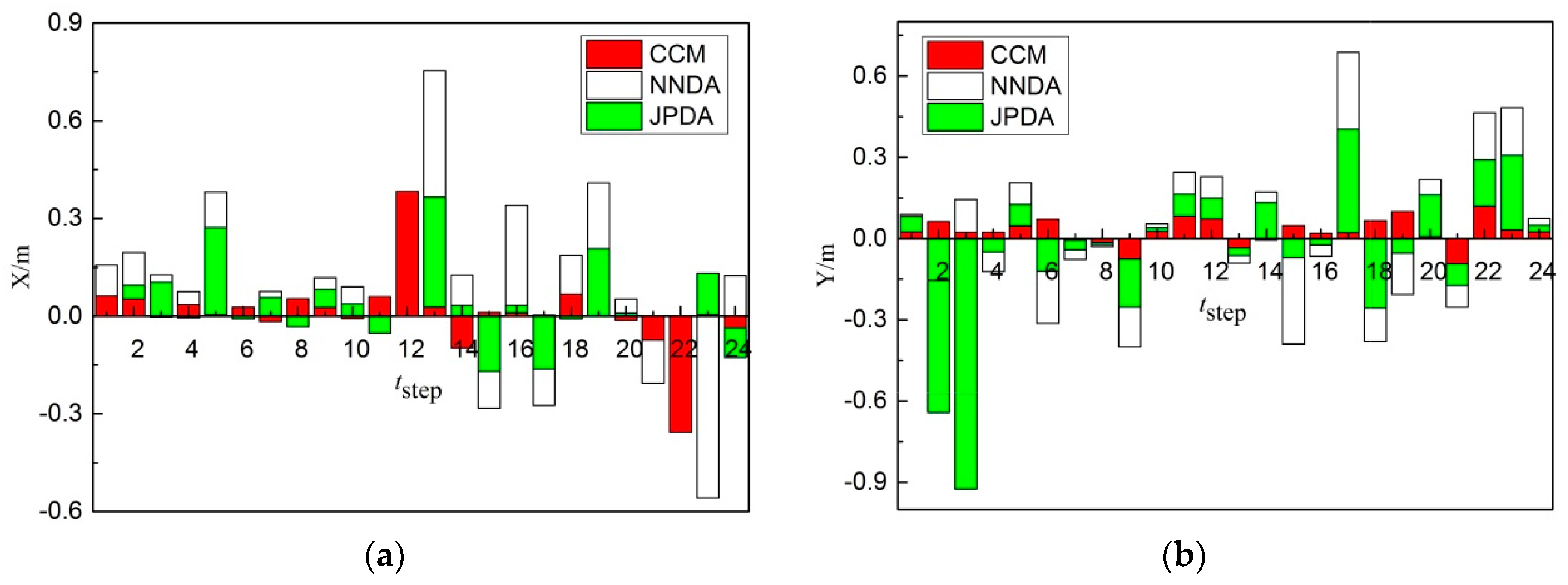
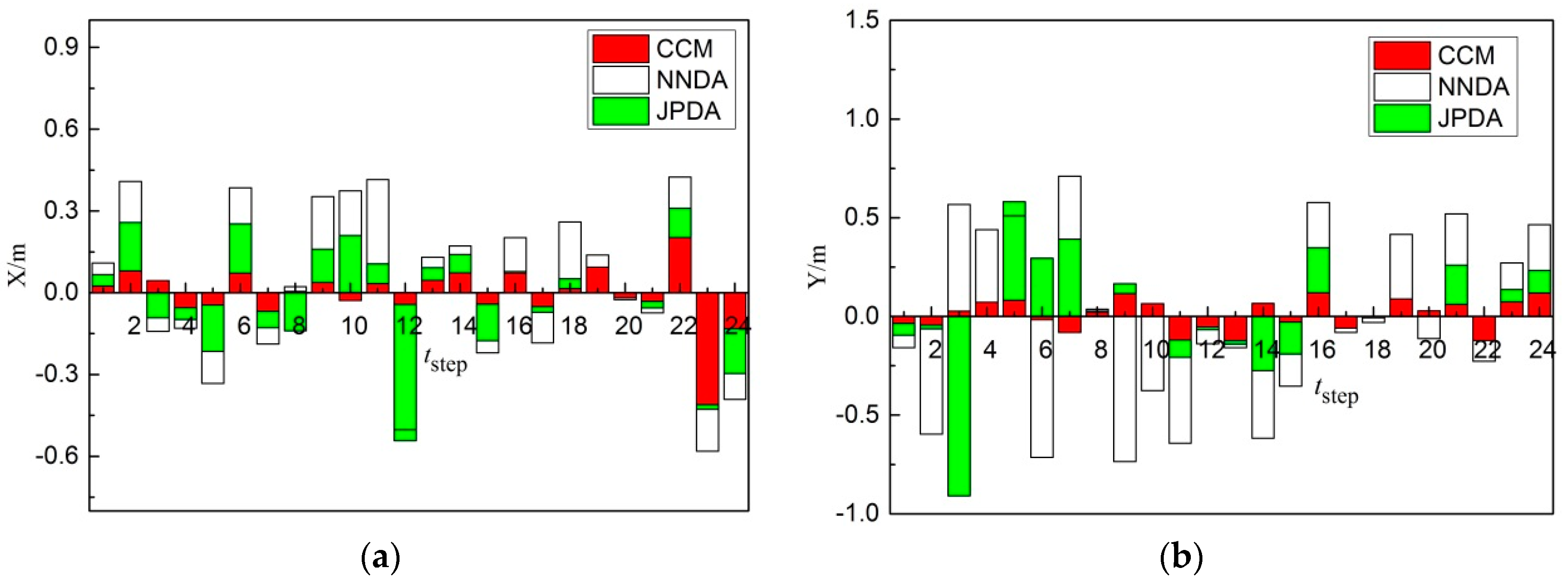
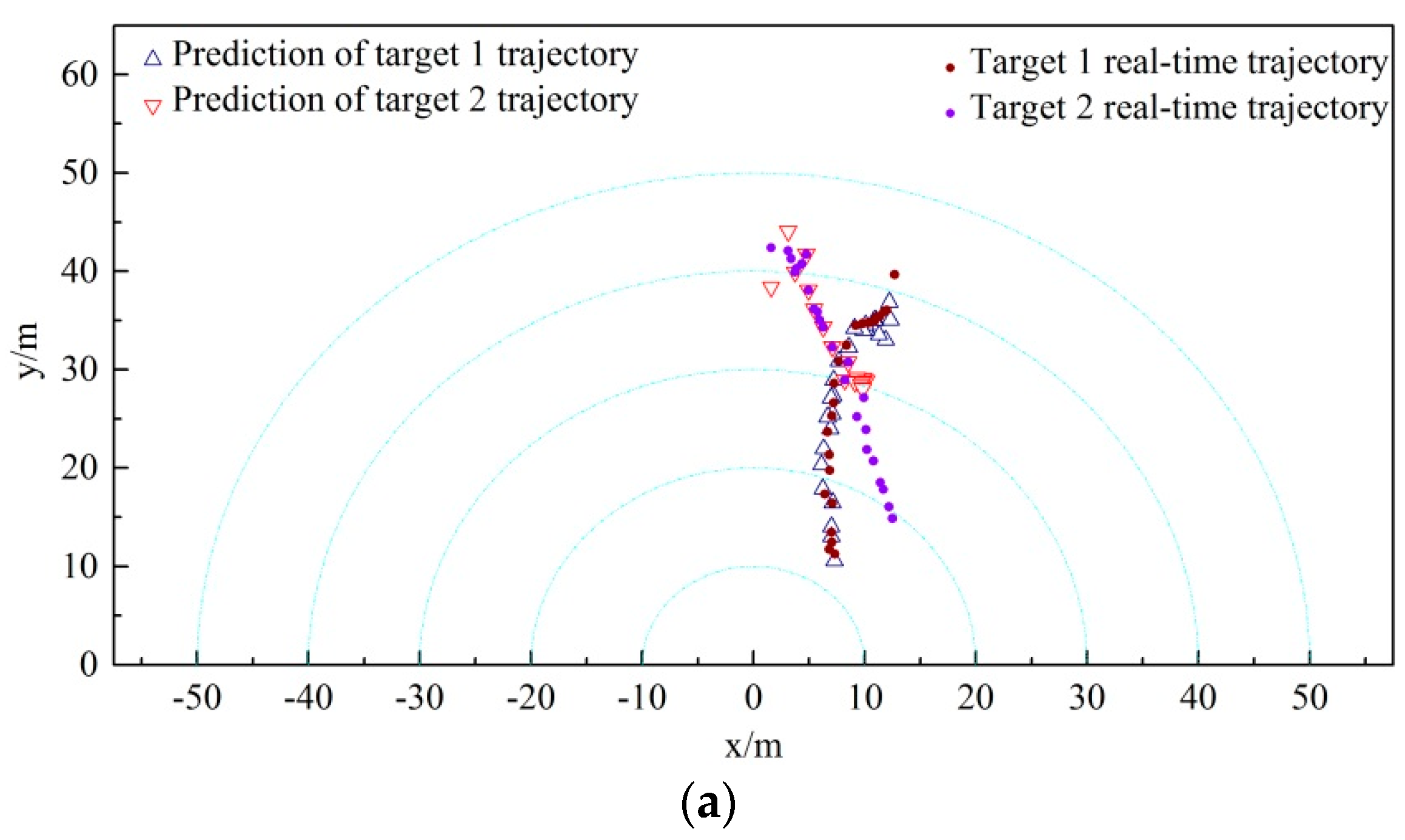
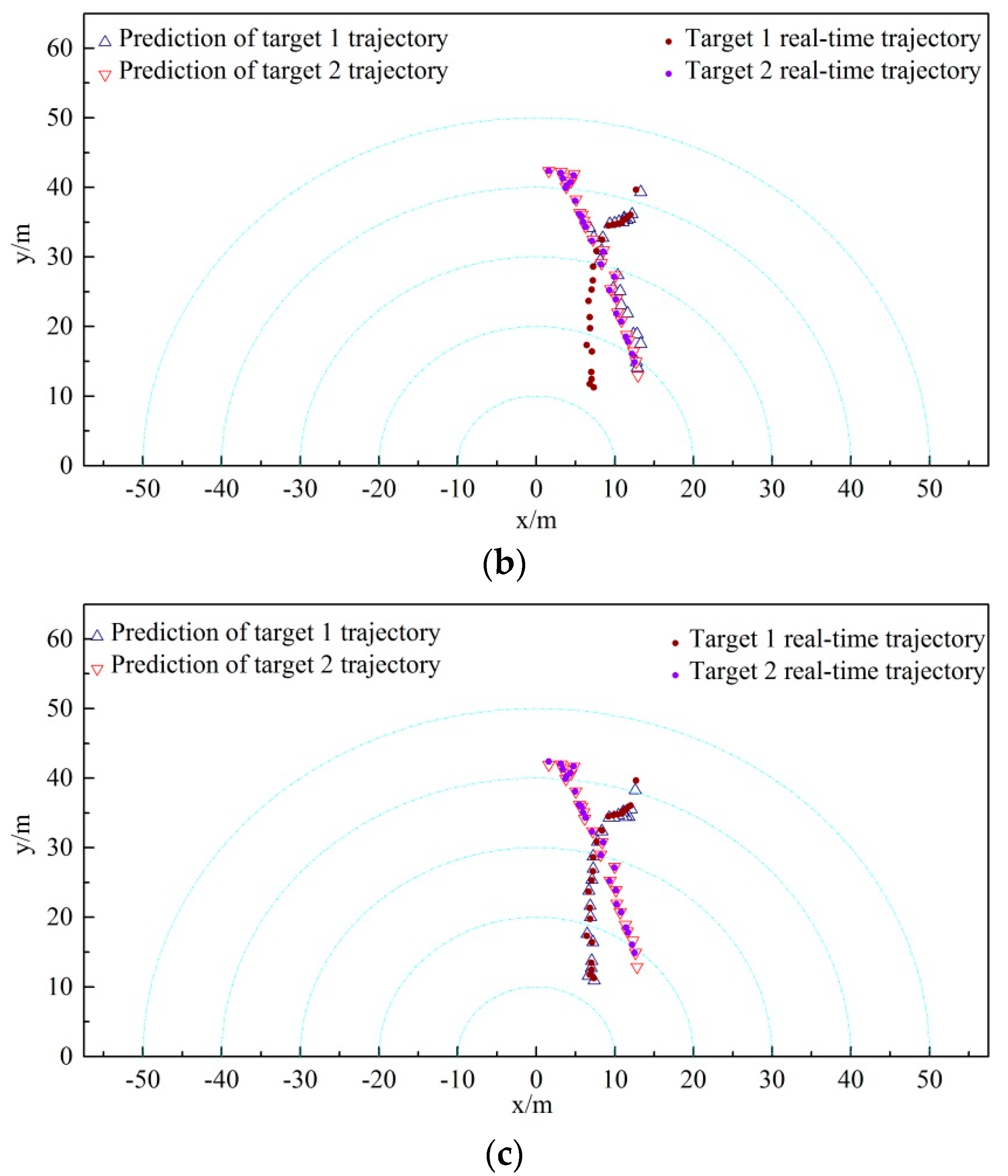
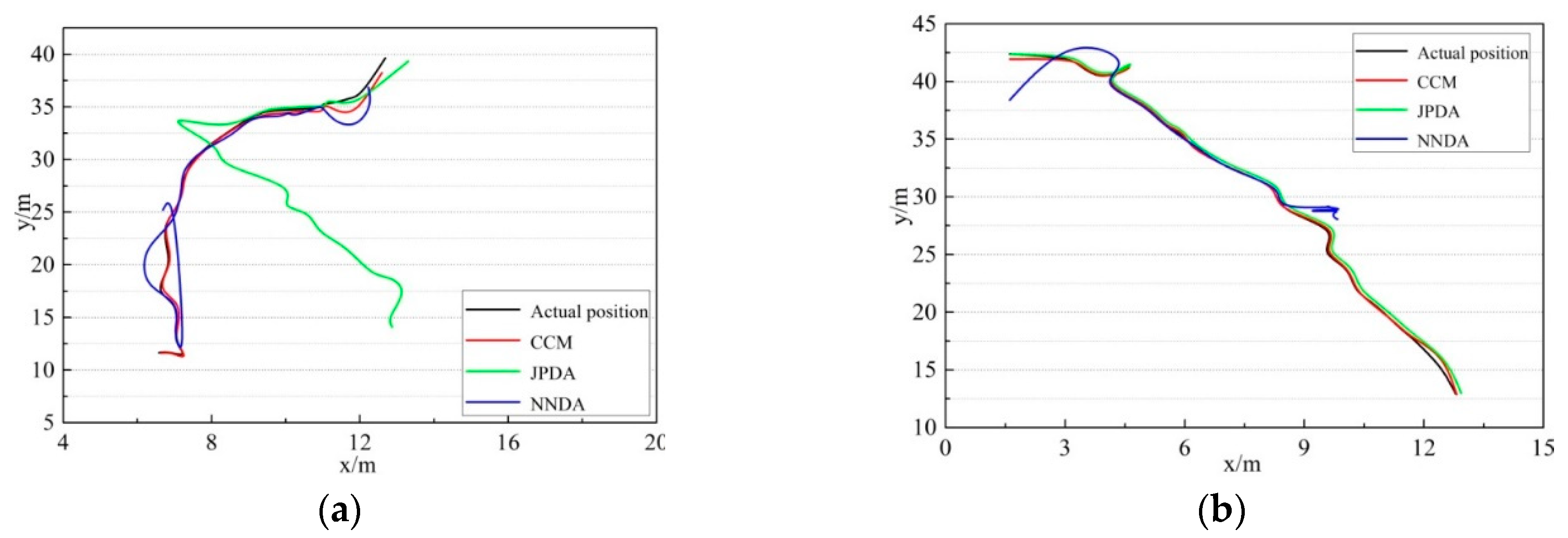
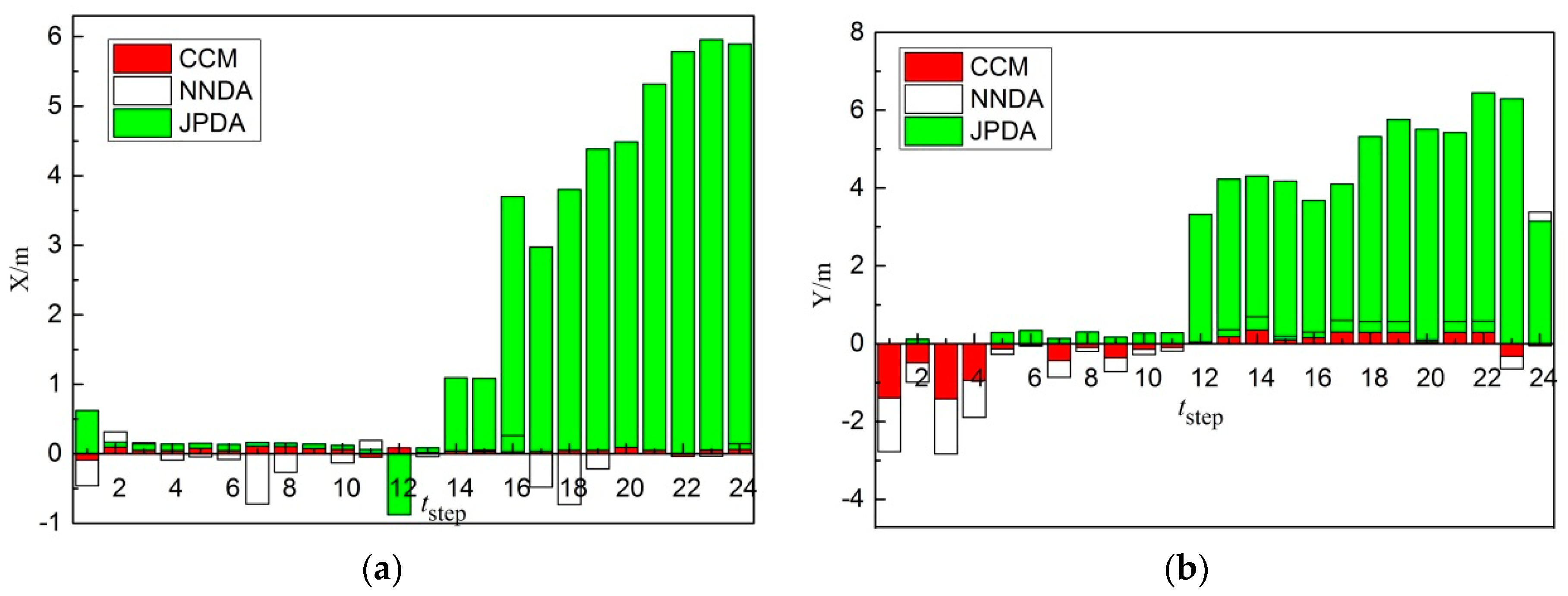
4.1. Results and Analysis of Non-Cross-Moving Experiment of Multiple Targets Experiment Using AUV
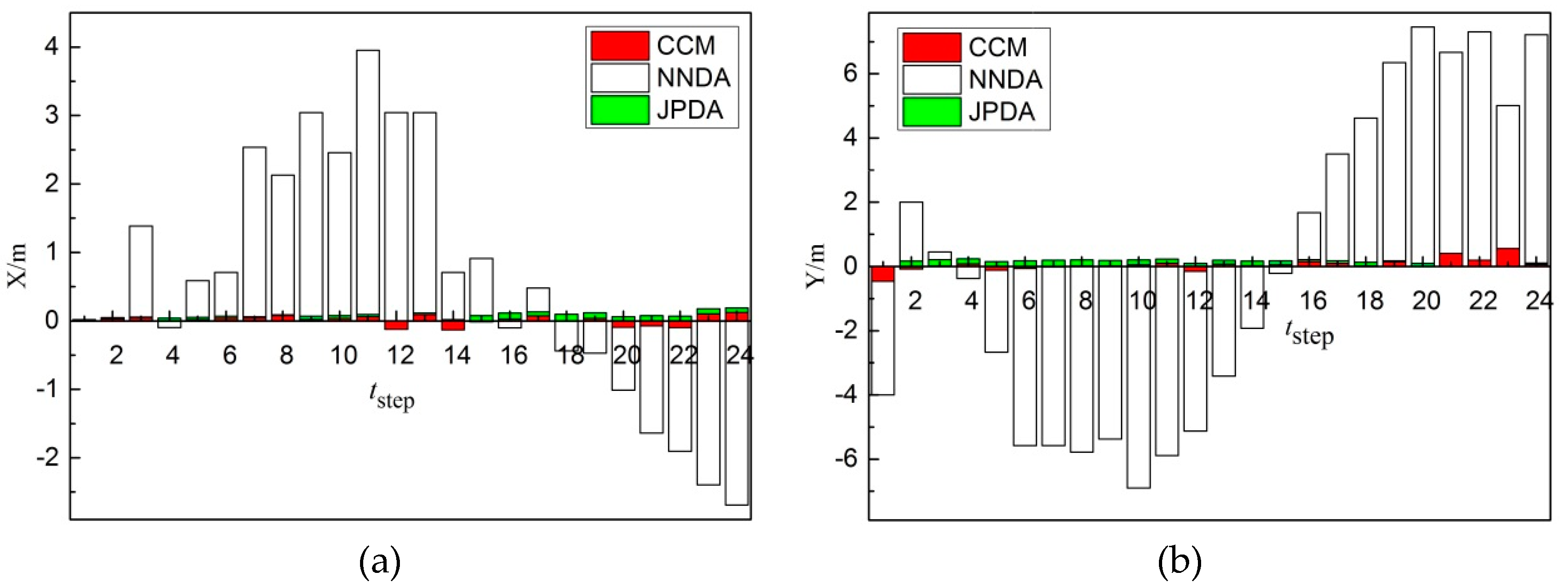
4.2. Results and Analysis of Cross-Moving Experiment of Multiple Targets Experiment Using AUV
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Xiang, X.; Yu, G.; Lapierre, L. Survey on fuzzy-logic-based guidance and control of marine surface vehicles and underwater vehicles. Int. J. Syst. 2018, 20, 572–586. [Google Scholar] [CrossRef]
- Guillaume, A.; Hua, M.; Szymon, K. Pipeline following by visual servoing for Autonomous Underwater Vehicles. Control Eng. Pract. 2019, 82, 151–160. [Google Scholar]
- Xiang, X.; Lapierre, L. Robust magnetic tracking of subsea cable by AUV in the presence of sensor noise and ocean currents. IEEE J. Ocean. Eng. 2018, 43, 311–322. [Google Scholar]
- Huo, G.Y.; Wu, Z.Y.; Li, S.B. Underwater target detection and 3D reconstruction system based on binocular vision. Sensors 2018, 18, 3570. [Google Scholar] [CrossRef] [PubMed]
- Shkurti, F.; Chang, W.D.; Henderson, P. Underwater threat detection and tracking using multiple sensors and advanced processing. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017; pp. 4189–4196. [Google Scholar]
- Meecham, A.; Acker, T. Underwater threat detection and tracking using multiple sensors and advanced processing. In Proceedings of the 2016 IEEE International Carnahan Conference on Security Technology, Orlando, FL, USA, 24–27 October 2016; pp. 443–450. [Google Scholar]
- Mandic, F.; Rendulic, I.; Miskovic, N.; Nadj, Đ. Underwater object tracking using sonar and USBL measurements. J. Sens. 2016, 2016, 1–10. [Google Scholar] [CrossRef]
- Juhwan, K.; Cheol, Y.S. Convolutional neural network-based real-time ROV detection using mechanically scanned imaging sonar image. Auton. Underw. Veh. 2016, 10, 396–400. [Google Scholar]
- Yoshida, S.; Tanomura, M.; Hama, Y. Underwater wireless power transfer for non-fixed unmanned underwater vehicle in the ocean. Auton. Underw. Veh. 2016, 5, 177–180. [Google Scholar]
- Wang, F.Q.; Zhang, X.; Xing, X.F. The research of underwater acoustic detection system for small AUV. In Proceedings of the 5th International Conference on Instrumentation and Measurement, Computer, Communication, and Control, Shenzhen, China, 17–18 September 2016; pp. 1828–1831. [Google Scholar]
- Alexandri, T.; Diamant, R. A reverse bearing only target motion analysis (BO-TMA) for improving AUV navigation accuracy. In Proceedings of the 2016 13th Workshop on Positioning, Navigation and Communication, Bremen, Germany, 19–20 October 2016; pp. 416–422. [Google Scholar]
- Petillot, Y.; Pailhas, Y.; Sawas, J. Target recognition in synthetic aperture sonar and high resolution side scan sonar using AUVs. In Proceedings of the 2010 International Conference on Synthetic Aperture Sonar and Synthetic Aperture Radar, Lerici, Italy, 13–14 September 2010; pp. 193–201. [Google Scholar]
- Georgy, J.; Noureldin, A.; Mellema, G. Clustered mixture particle filter for underwater multitarget tracking in multistatic active sonobuoy systems. IEEE Trans. Syst. Man Cybern. 2011, 42, 547–560. [Google Scholar] [CrossRef]
- Breivik, G.M.; Fjerdingen, S.A.; Skotheim, O. Robust pipeline localization for an autonomous underwater vehicle using stereo vision and echo sounder data. Int. Soc. Opt. Eng. 2010, 12, 7539–7545. [Google Scholar]
- Chen, J.B.; Gong, Z.B.; Li, H.Y. A detection method based on sonar image for underwater pipeline tracker. In Proceedings of the 2011 2nd International Conference on Mechanic Automation and Control Engineering, Inner Mongolia, China, 15–17 July 2011; pp. 3766–3769. [Google Scholar]
- Akira, A.; Tamaki, U.; Fumitaka, M. Sub-bottom synthetic aperture imaging sonar system using an AUV and an autonomous surface tracking vehicle for searching for buried shells of toxic chemicals. In Proceedings of the 2010 International WaterSide Security, Carrara, Italy, 3–5 November 2010; pp. 193–196. [Google Scholar]
- Kim, J.; Yu, S. Convolutional neural network-based real-time ROV detection using forward-looking sonar image. In Proceedings of the 2016 IEEE/OES Autonomous Underwater Vehicles, Tokyo, Japan, 6–9 November 2016; pp. 396–400. [Google Scholar]
- Chen, Q.; Yan, Y.; Dai, Y. Joint nearest neighbor data association based on interacting multiple model Kalman filtering. In Proceedings of the 2016 2nd IEEE International Conference on Computer and Communications, Chengdu, China, 14–17 October 2016; IEEE: New York, NY, USA, 2016; pp. 75–79. [Google Scholar]
- Clark, D. Multiple Target Tracking with the Probability Hypothesis Density Filter. Ph.D. Thesis, Heriot-Watt University, Edinburgh, UK, 2006. [Google Scholar]
- Luom, J. Data association for AUV localization and map building. In Proceedings of the 2010 International Conference on Measuring Technology and Mechatronics Automation, Changsha, China, 13–14 March 2010; pp. 2231–2240. [Google Scholar]
- Haanju, Y.; Kikyung, K.; Moonsub, B. Online scheme for multiple camera multiple target tracking based on multiple hypothesis tracking. IEEE Trans. Circuits Syst. Video Technol. 2017, 27, 454–469. [Google Scholar]
- Hardalac, F.; Kutbay, U.; Sahin, l. A novel method for robust object tracking with K-means clustering using histogram back-projection technique. Multimed. Tools Appl. 2018, 78, 24059–24072. [Google Scholar] [CrossRef]
- Zhang, L.; Li, Y.; Nevatia, R. Global data association for multi-object tracking using network flows. In Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008. [Google Scholar]
- Neira, J.; Tardos, J.D. Data association in stochastic mapping using the joint compatibility experiment. IEEE Trans. Robot. Autom. 2001, 17, 890–897. [Google Scholar] [CrossRef]
- Yang, S.; Marcus, B. Extended Kalman filter for extended object tracking. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing, New Orleans, LA, USA, 5–9 March 2017; pp. 4386–4390. [Google Scholar]
- Zhou, J. EKF based object detect and tracking for UAV by using visual-attention-model. In Proceedings of the 2014 IEEE International Conference on Progress in Informatics and Computing, Shanghai, China, 16–18 May 2014; pp. 168–172. [Google Scholar]
- Du, Y.M.; Yu, L.; Gai, L.N. Analysis of nonlinear processing ability of sequential Monte Carlo filter. In Proceedings of the 2018 4th International Conference on Control, Automation and Robotics, Auckland, New Zealand, 20–23 April 2018; pp. 305–309. [Google Scholar]
- Doucet, A.; Godsill, S.; Andrieu, C. On sequential Monte Carlo sampling methods for Bayesian filtering. Stat. Comput. 2000, 10, 197–208. [Google Scholar] [CrossRef]
- Super SeaKing Sonar—Mechanical Scanning (Work-Class ROV). Available online: https://www.tritech.co.uk/product/mechanical-scanning-sonar-tritech-super-seaking (accessed on 11 January 2019).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Low Frequency | High Frequency |
|---|---|---|
| Frequency | CHIRP centered on 325 kHz | CHIRP centered on 650 kHz |
| Beam width | 20° vertical, 3.0° horizontal | 40° vertical, 1.5° horizontal |
| Pulse length | 400 μs | 200 μs |
| Maximum range | 300 m | 100 m |
| Minimum range | 0.4 m | |
| Range resolution | approximately 15 mm (minimum) | |
| Source level | 210 dB re 1 μPa at 1 m | |
| Mechanical resolutions | 0.45°, 0.9°, 1.8°, and 3.6° | |
| Scanned sector | Variable up to 360° | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sheng, M.; Tang, S.; Qin, H.; Wan, L. Clustering Cloud-Like Model-Based Targets Underwater Tracking for AUVs. Sensors 2019, 19, 370. https://doi.org/10.3390/s19020370
Sheng M, Tang S, Qin H, Wan L. Clustering Cloud-Like Model-Based Targets Underwater Tracking for AUVs. Sensors. 2019; 19(2):370. https://doi.org/10.3390/s19020370
Chicago/Turabian StyleSheng, Mingwei, Songqi Tang, Hongde Qin, and Lei Wan. 2019. "Clustering Cloud-Like Model-Based Targets Underwater Tracking for AUVs" Sensors 19, no. 2: 370. https://doi.org/10.3390/s19020370
APA StyleSheng, M., Tang, S., Qin, H., & Wan, L. (2019). Clustering Cloud-Like Model-Based Targets Underwater Tracking for AUVs. Sensors, 19(2), 370. https://doi.org/10.3390/s19020370