Passing through Open/Closed Doors: A Solution for 3D Scanning Robots



Abstract
:1. Introduction
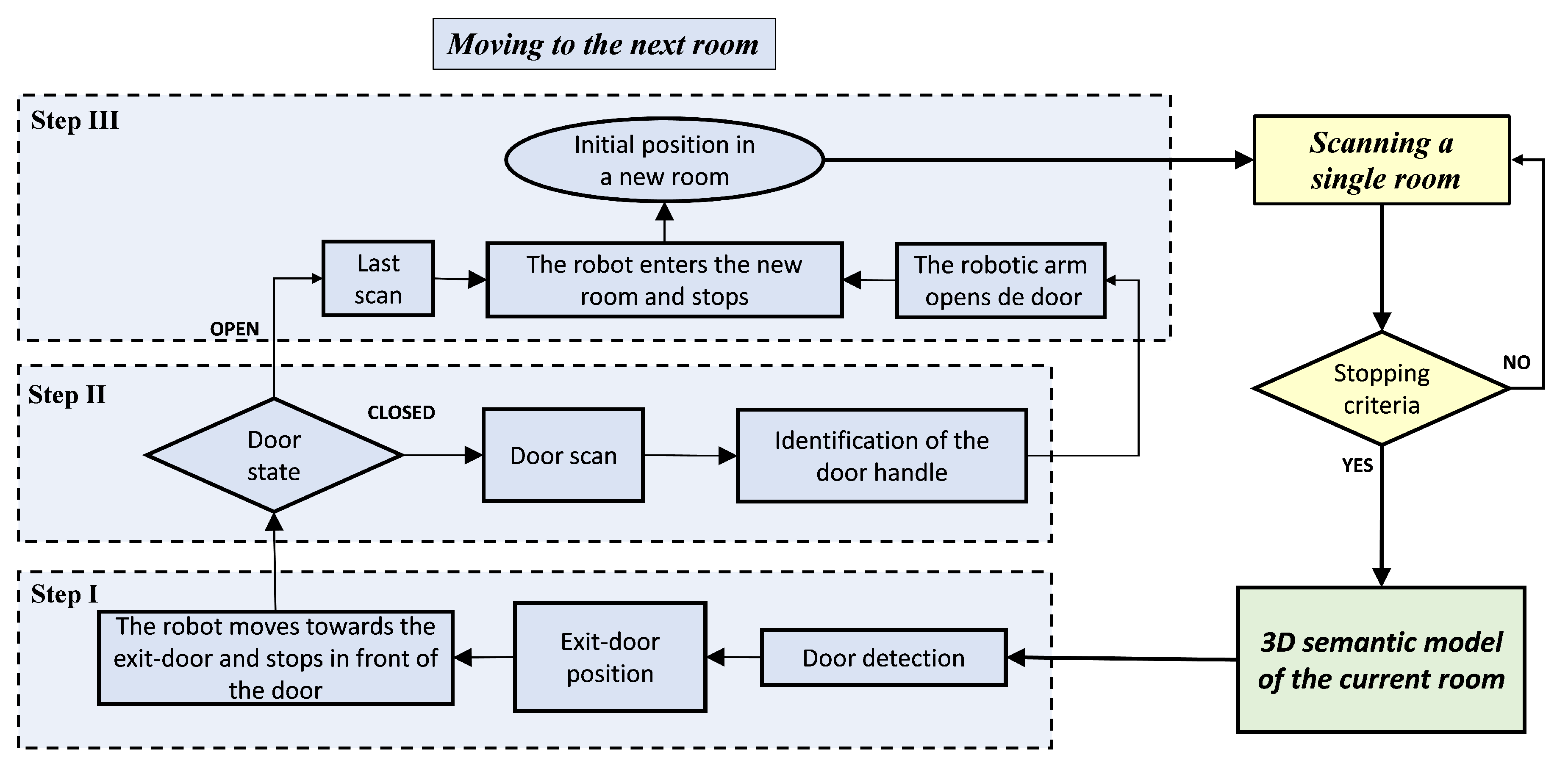
2. Overview of the Method
3. Step I. Moving towards the Exit Door
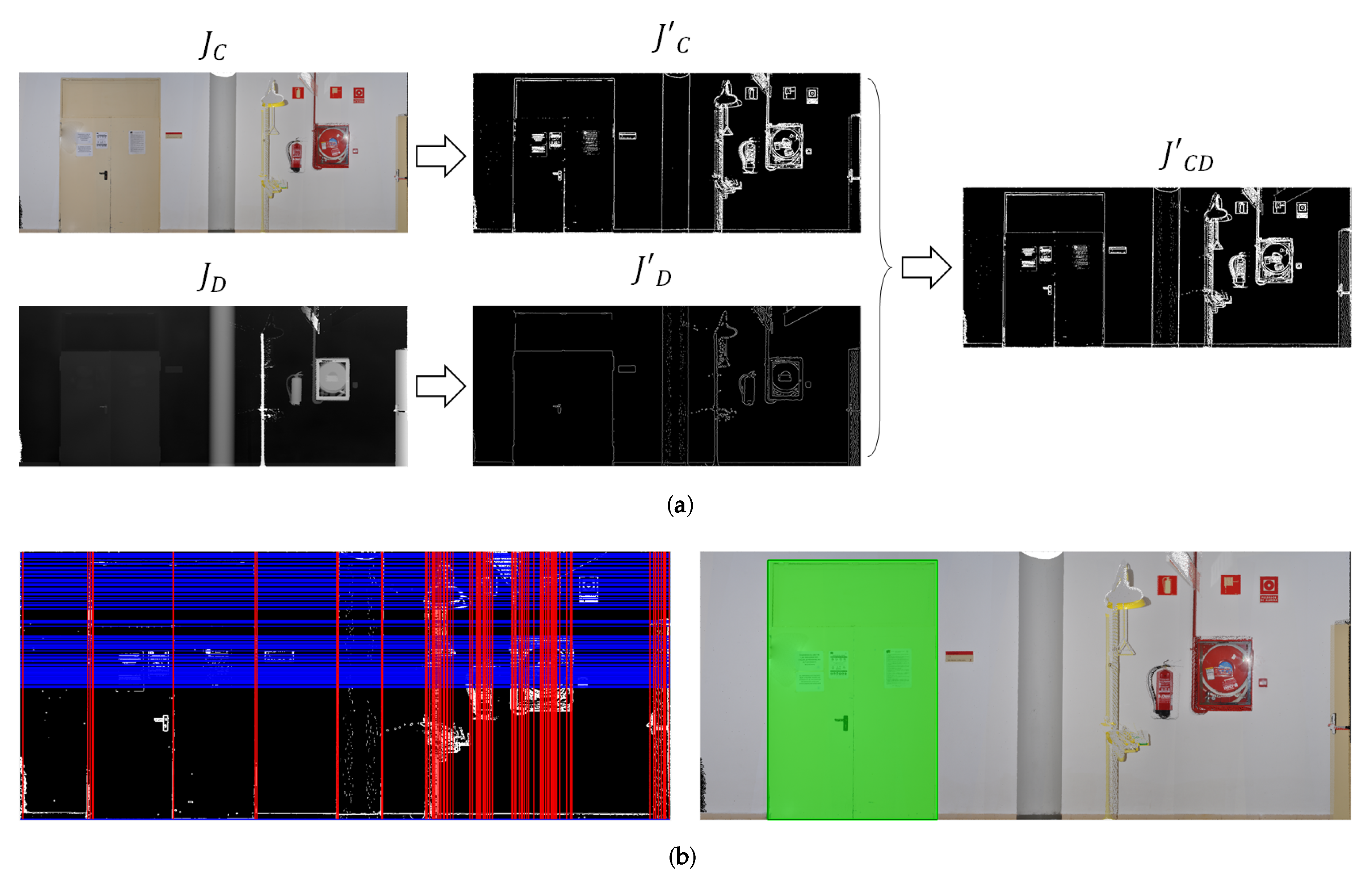
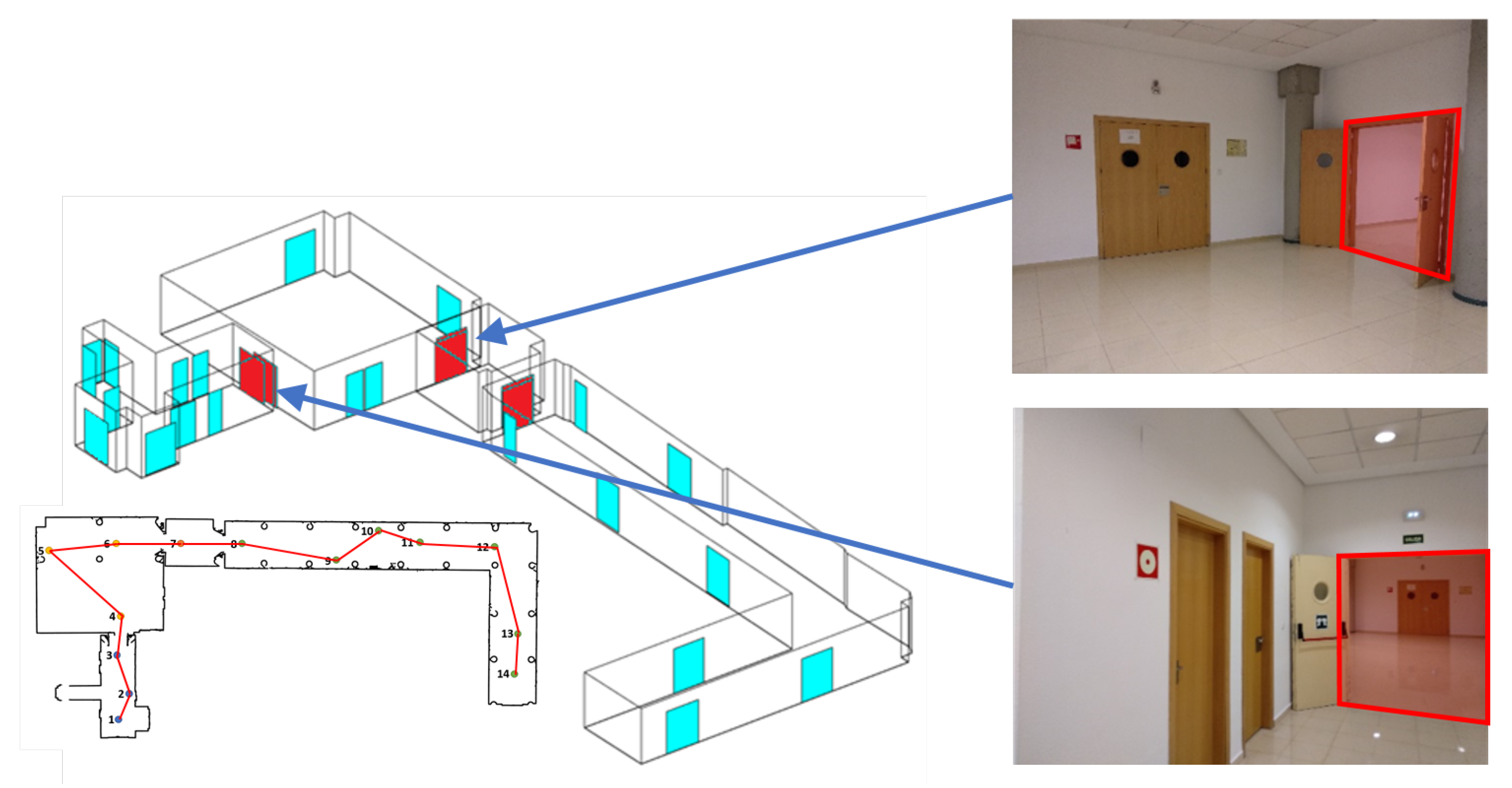
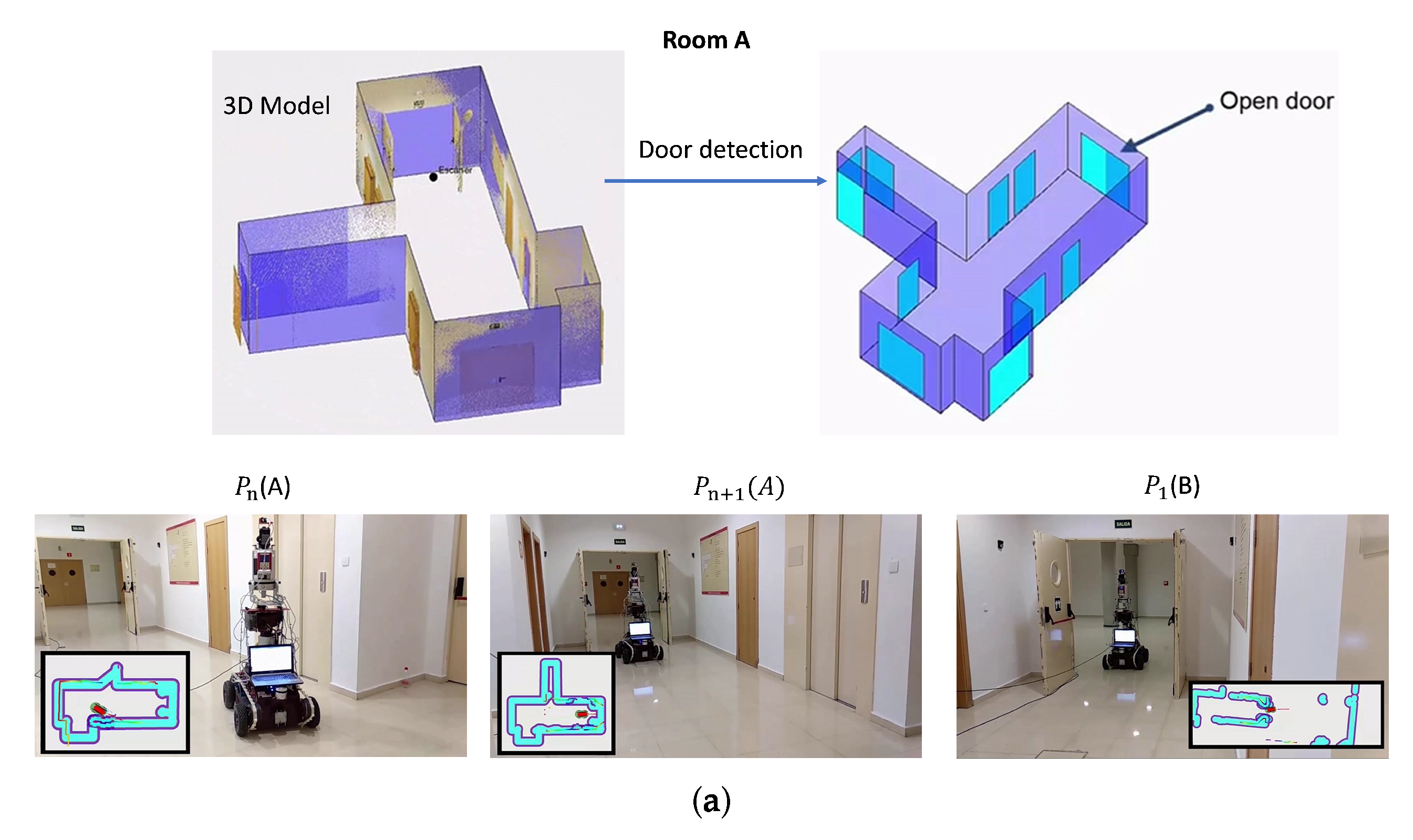
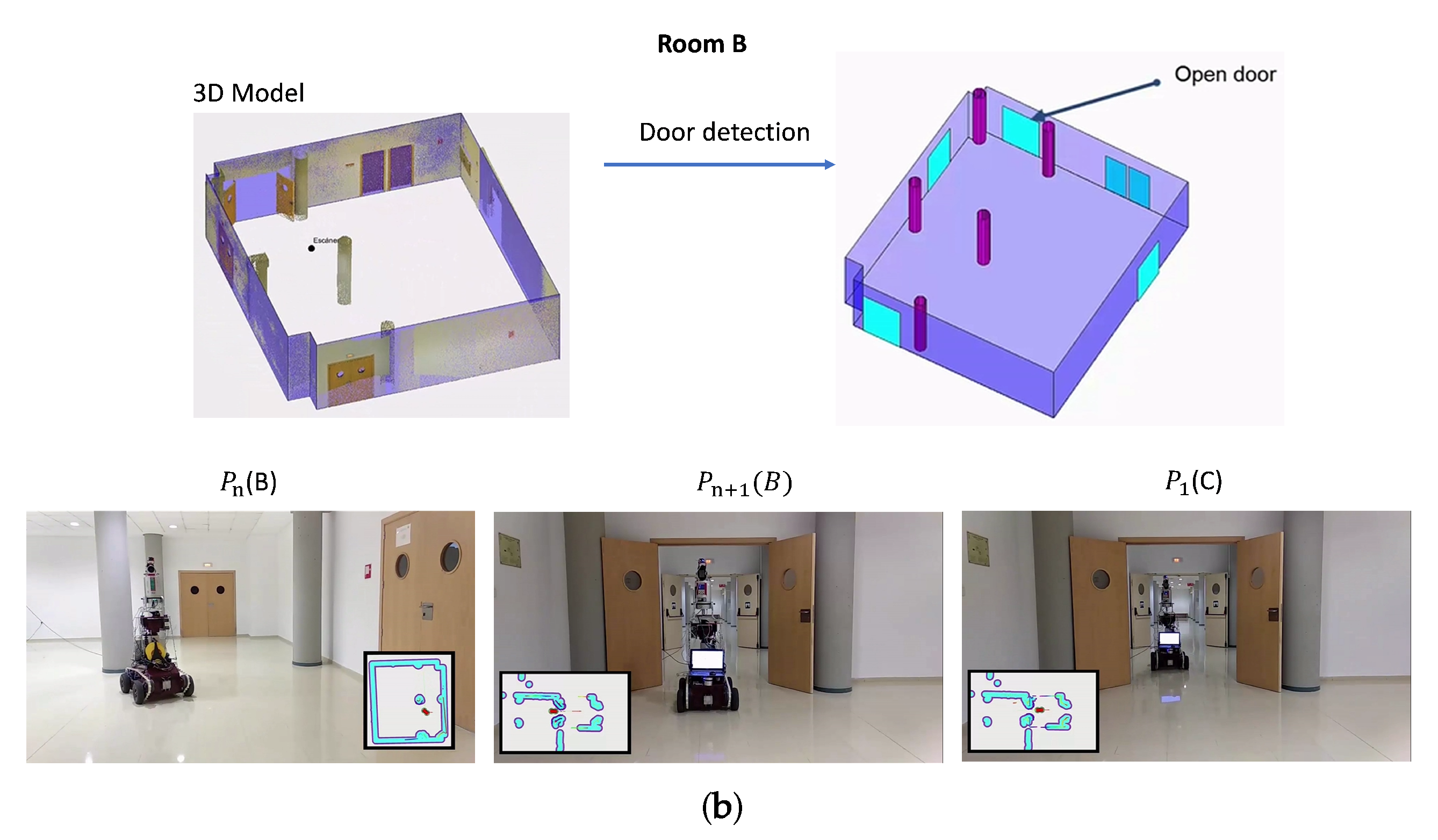
3.1. Door Recognition and Positioning
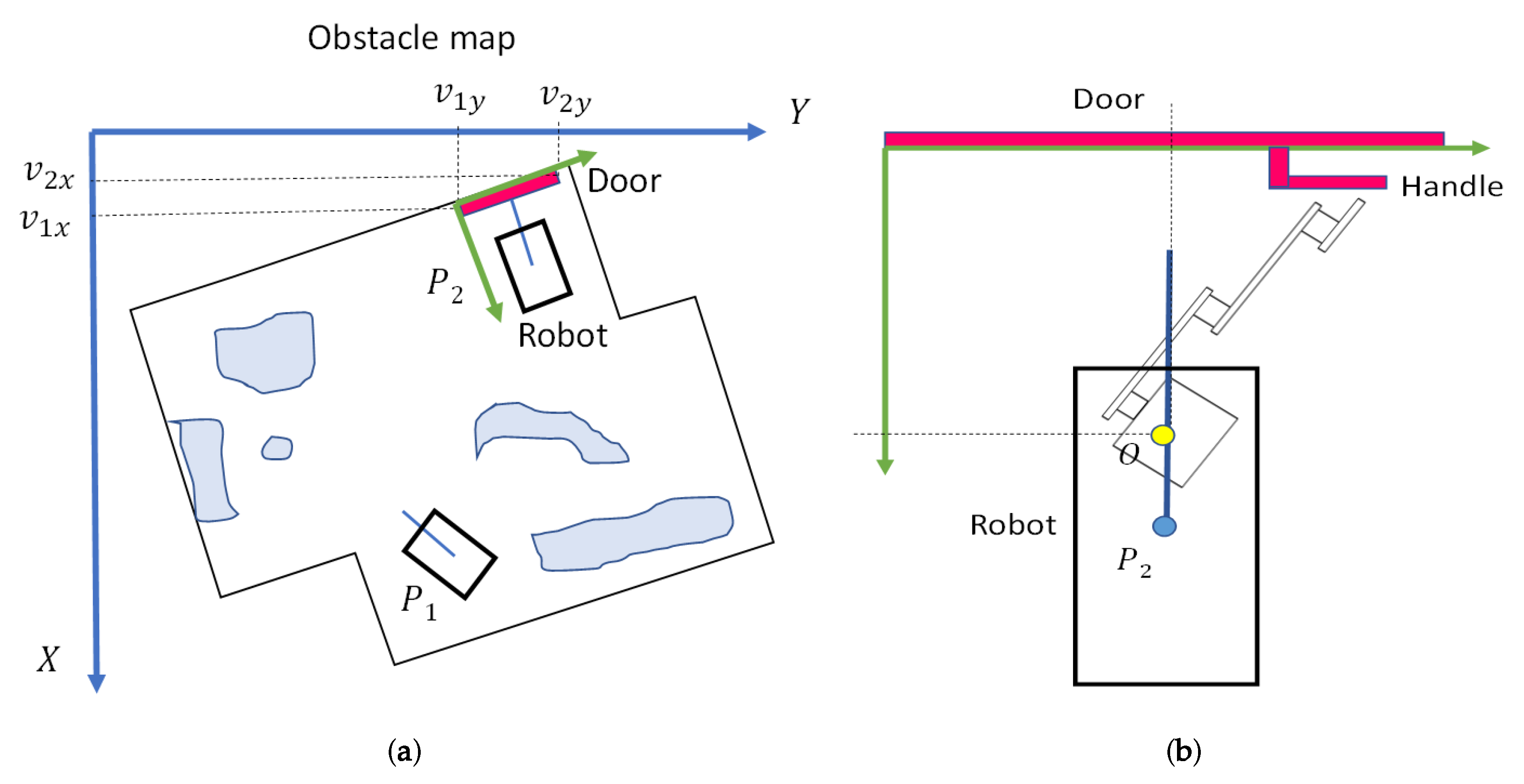
3.2. Robot Navigation and Final Placement
4. Step II. Handle Recognition and Positioning
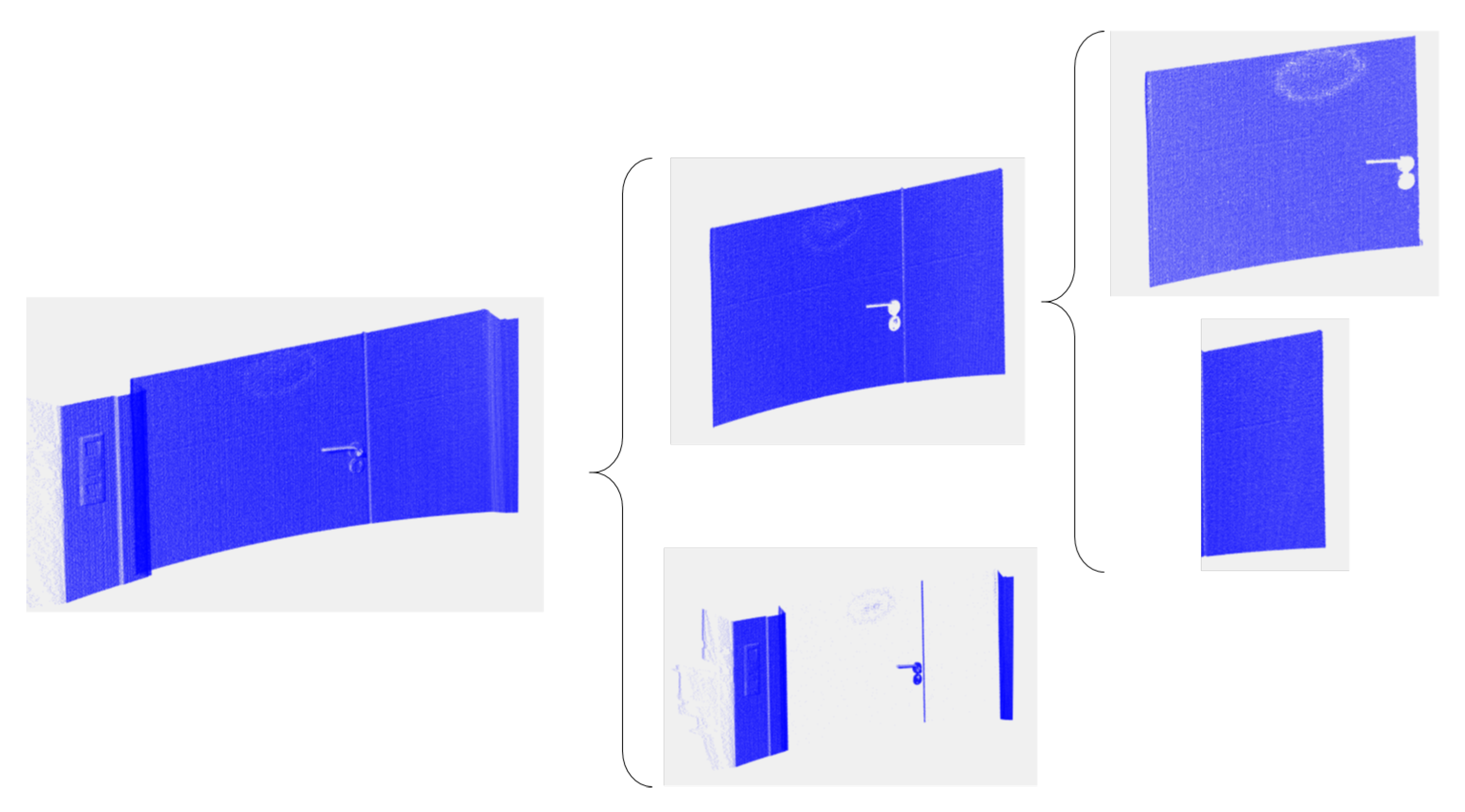
- Stage I: Calculation of the door’s plane and its associated points. First, the point cloud is segmented into two parts: one segment corresponds to the points belonging to the door and the other contains the remaining points. The segmentation is carried out by using the MLSAC method, which provides two planes, and , corresponding to both segments.
- Stage II: Defining the moving door leaf. Since the door can be composed of two parts (see Figure 6), which we denominate as moving and unmoving parts, it is necessary to delimitate the moving part of the door. A simple 3D growing region algorithm yields several segments of points, with the largest corresponding to the moving door leaf.
- Stage III: Pulling or pushing door. The type (pulling or pushing) of the door is determined by analysing the relative position of the aforementioned planes and . As is usual in doors, if is behind , the door is pushed, and otherwise it is pulled.
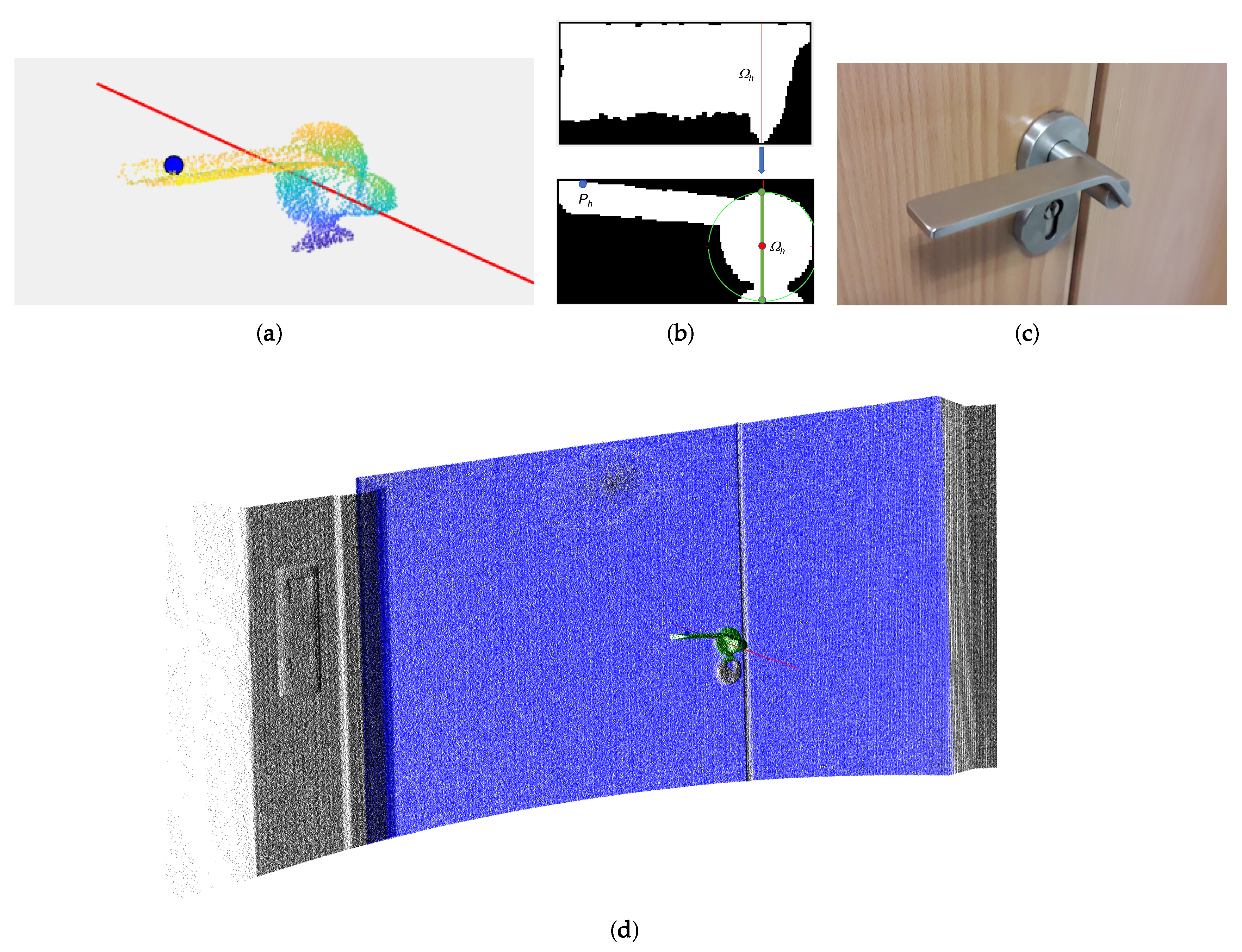
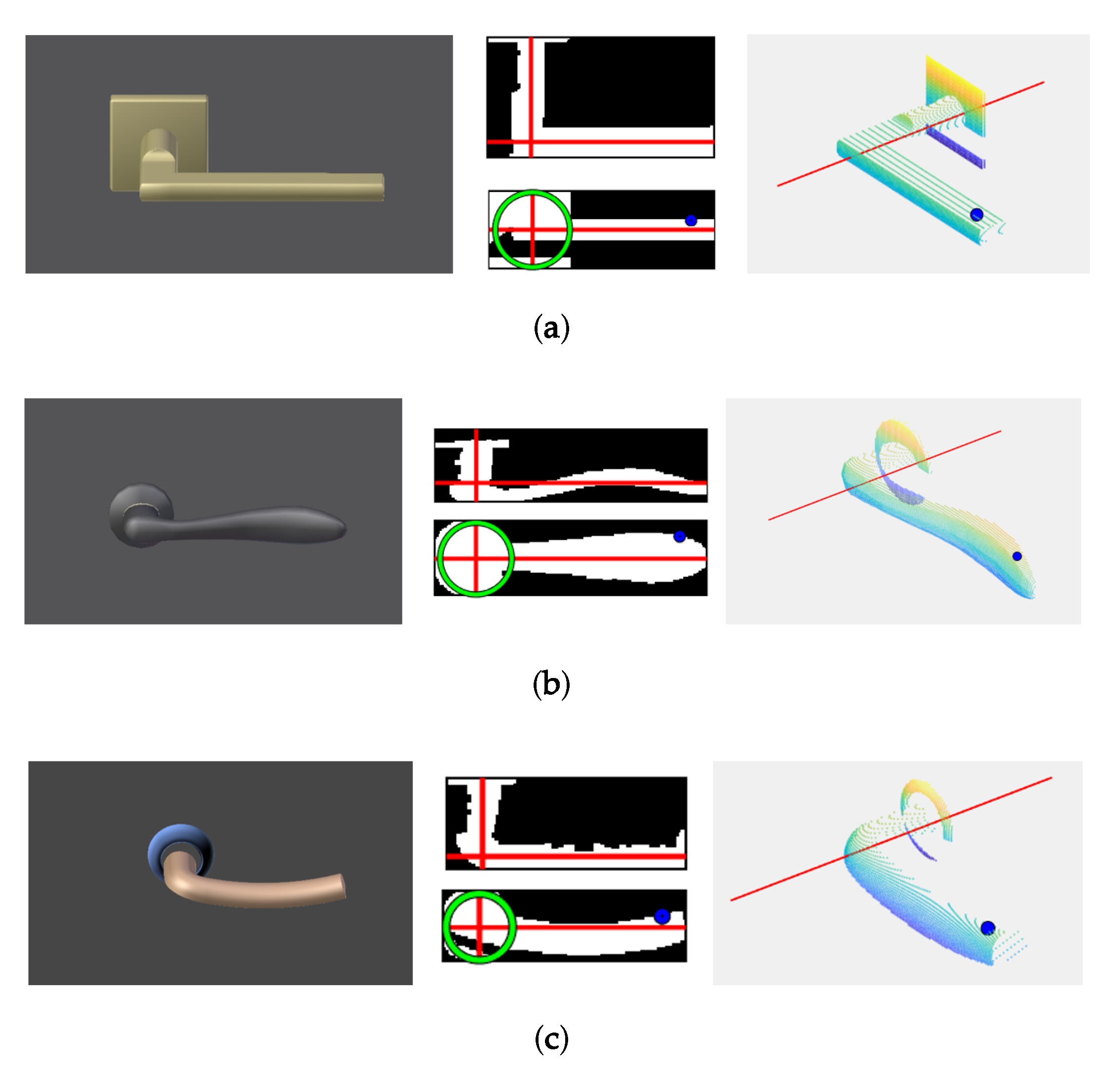
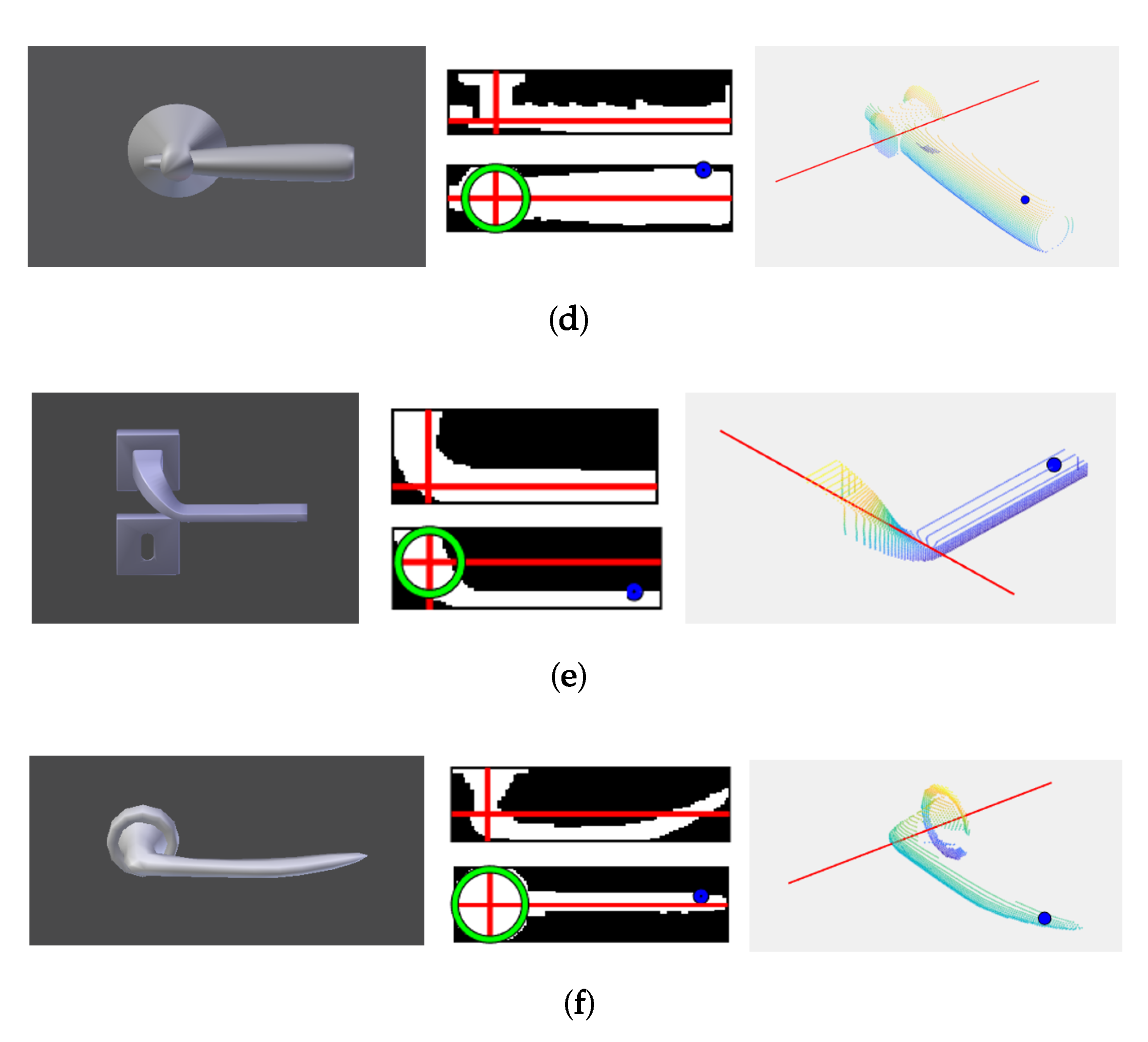
- Stage IV: Door handle and contact point. The protruding points within the door leaf boundaries are assumed to be the points corresponding to the door handle, which we denotate as . The rotation axis of the door is established as the furthest vertical door edge with respect to the handle.In order to identify the rotation axis of the handle, , and the contact point of the robot arm, , we process the top and frontal projected images of as follows.
- -
- The top projection of the rotation axis is found as the largest vertical profile in the top projected image, which covers the rod that joins the handle to the door frame. This axis can be appreciated in Figure 7b, Top. Note the noisy points generated by the 3D scanner in the upper part of the figure. This axis has also been used in the frontal projected image in Figure 7b, Bottom, to obtain a perpendicular line in the image. The intersection of this line with the highest and lowest points of the handle defines a segment whose middle point establishes the perpendicular projection of the rotation axis.
- -
- The contact point, , is located at the point furthest away from the axis of rotation, with an offset of 10% of the handle length.
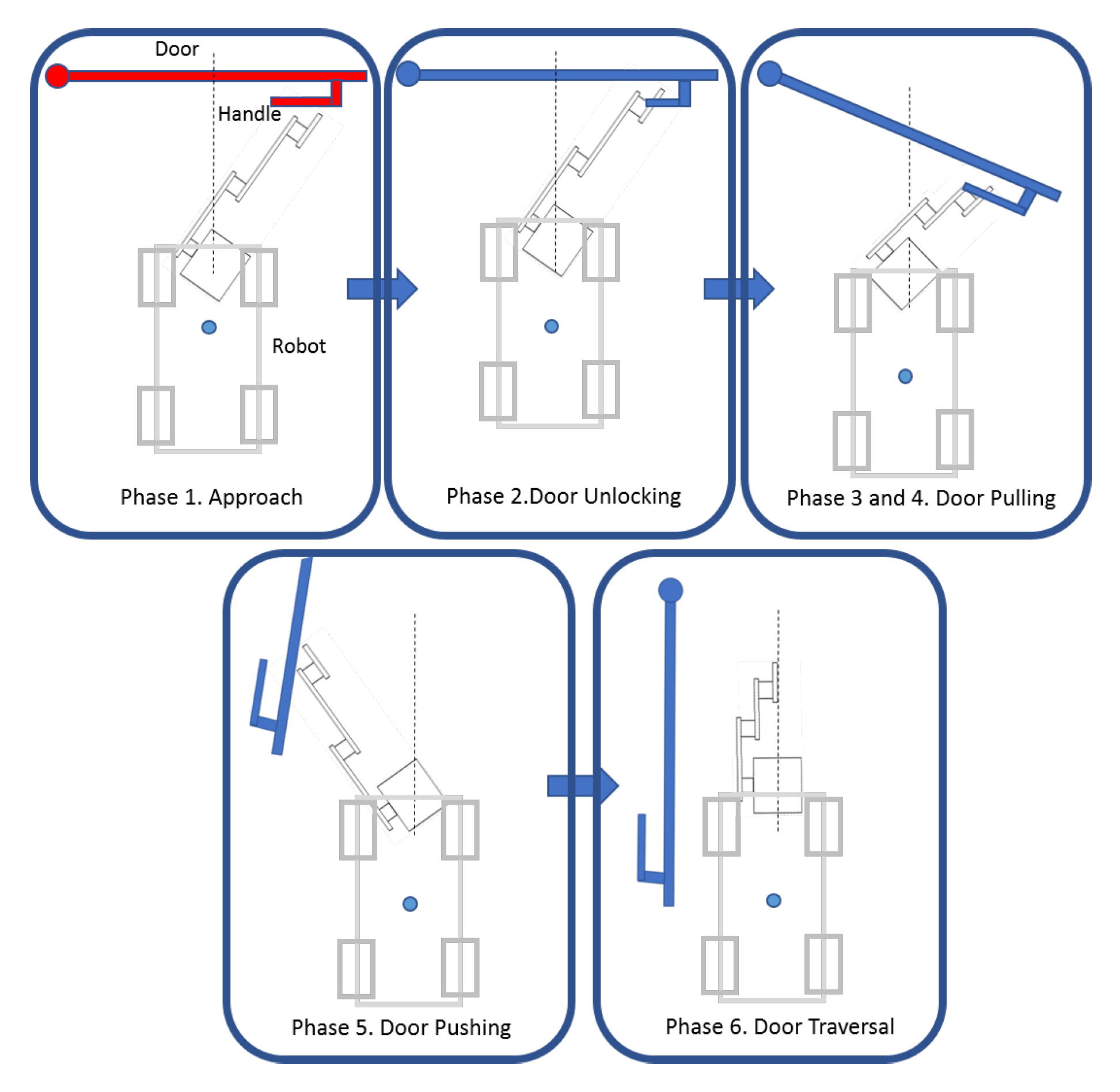
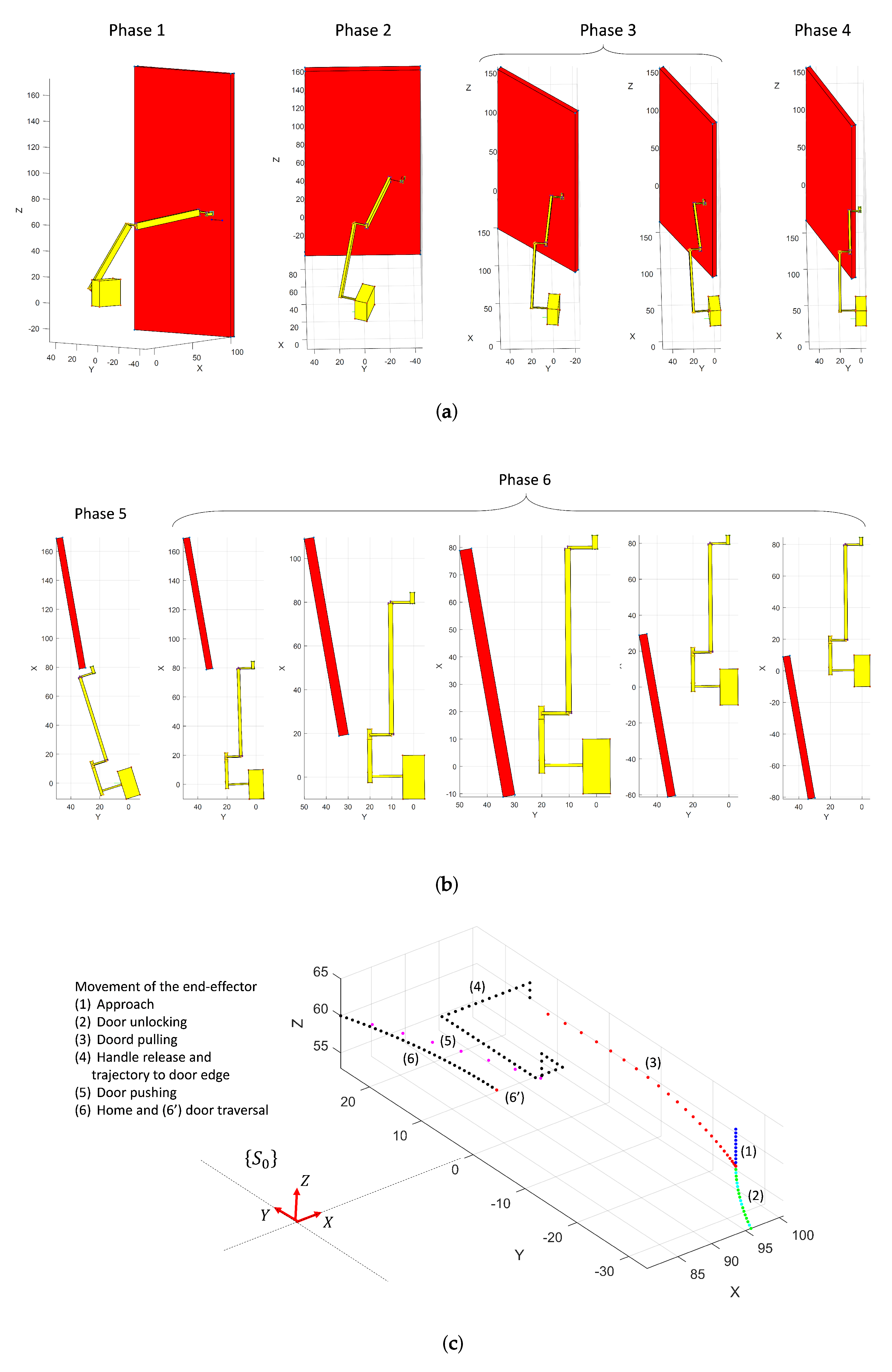
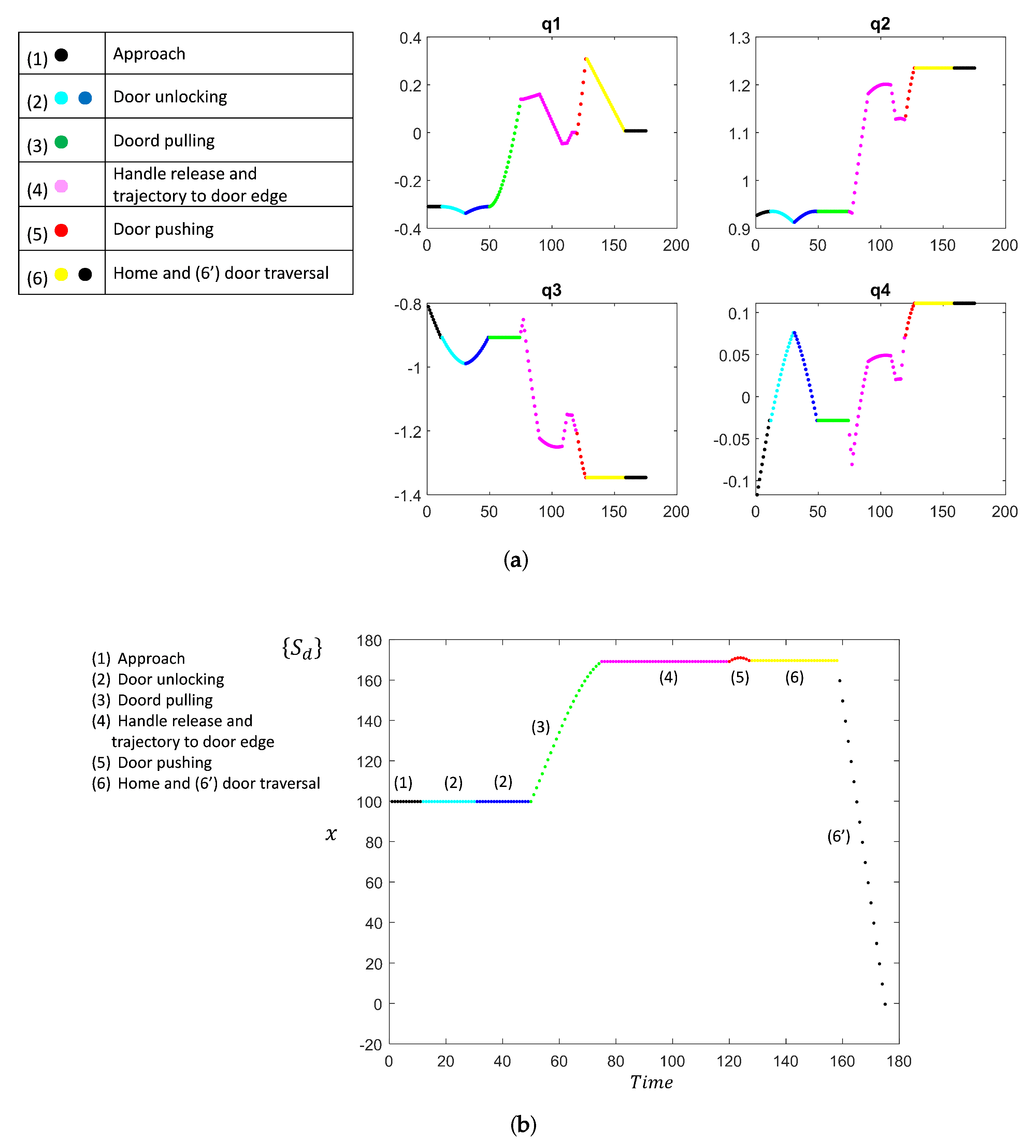
5. Step III. Opening Closed Doors
5.1. Phase 1. Approach
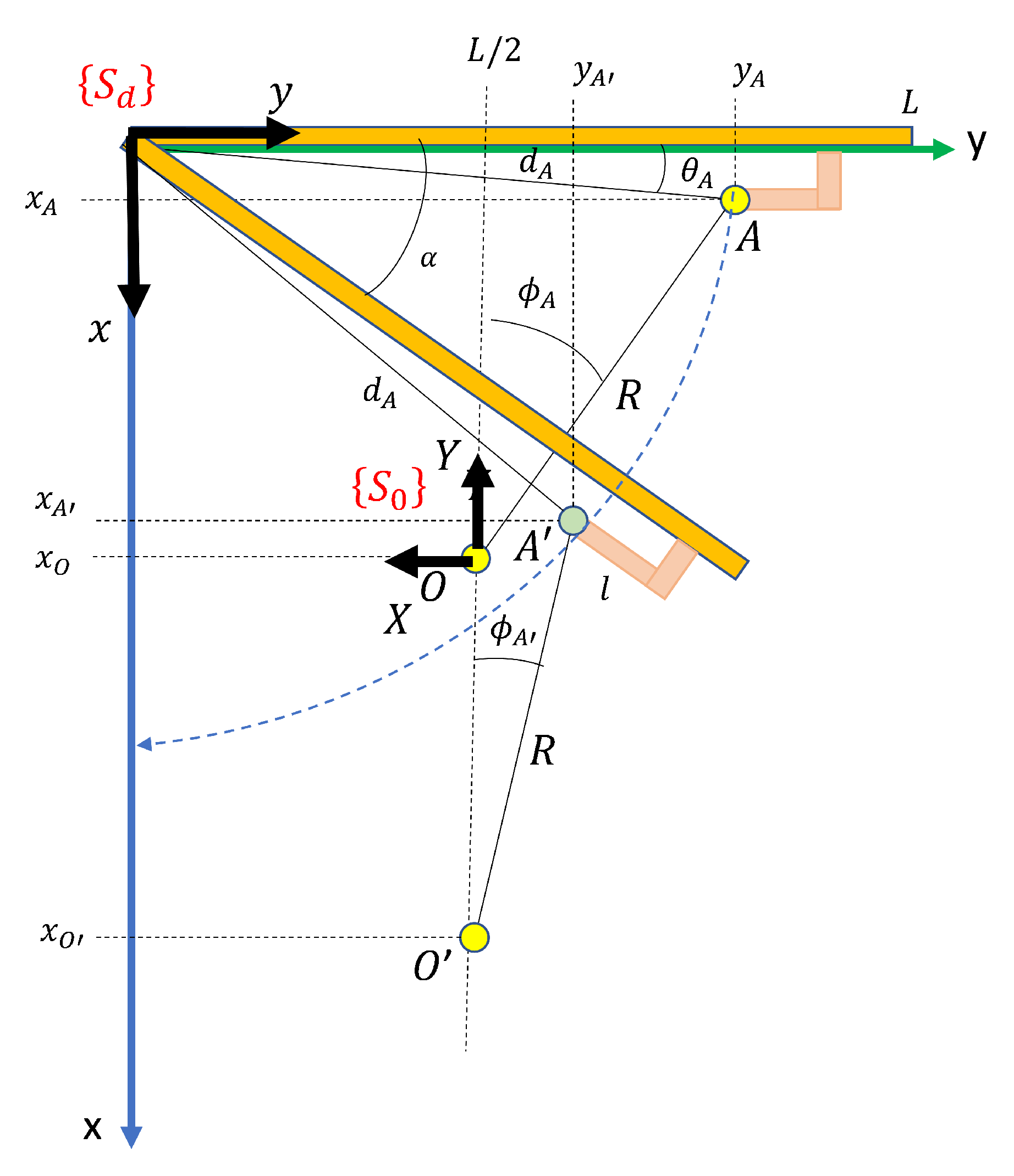
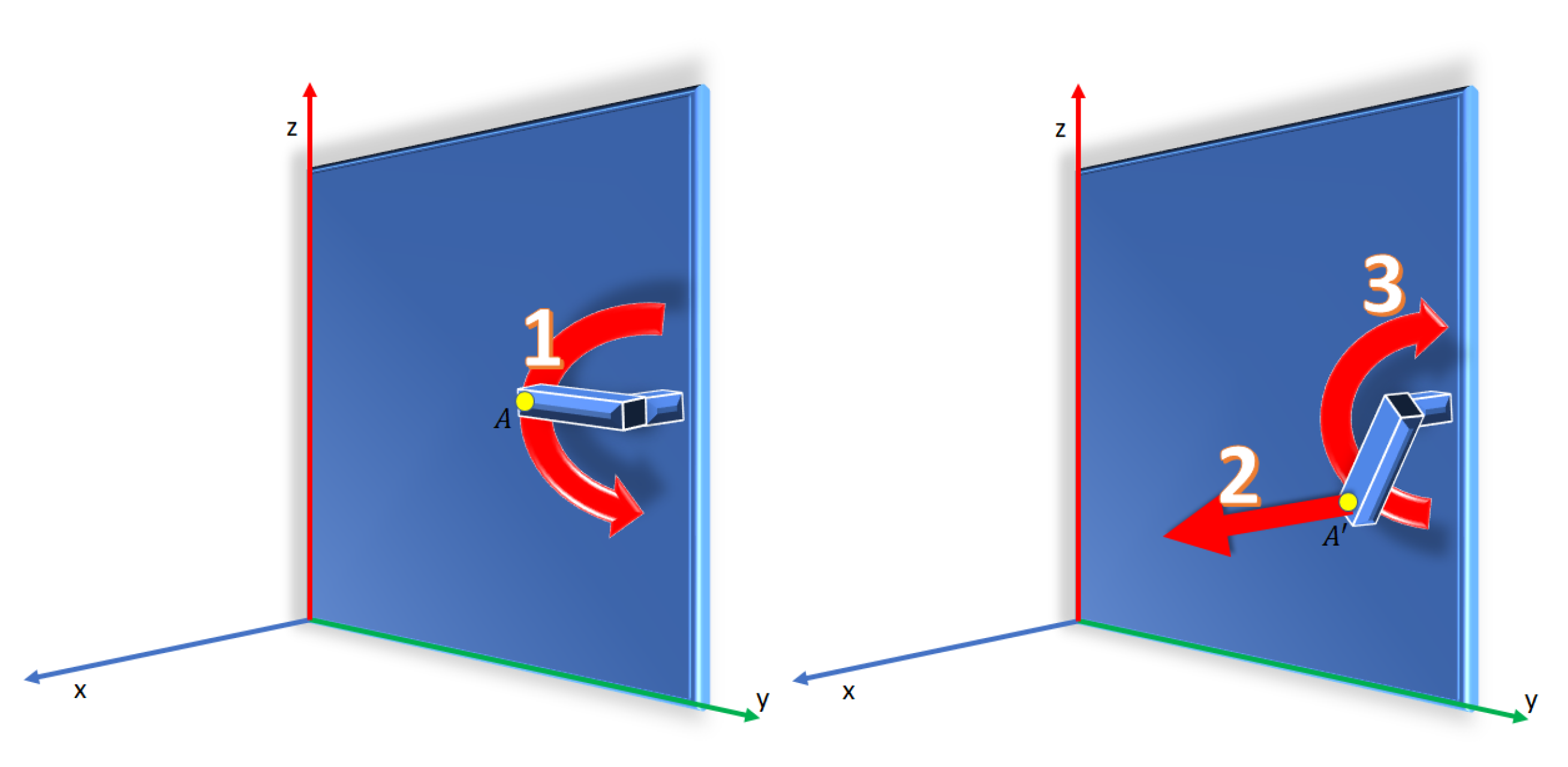
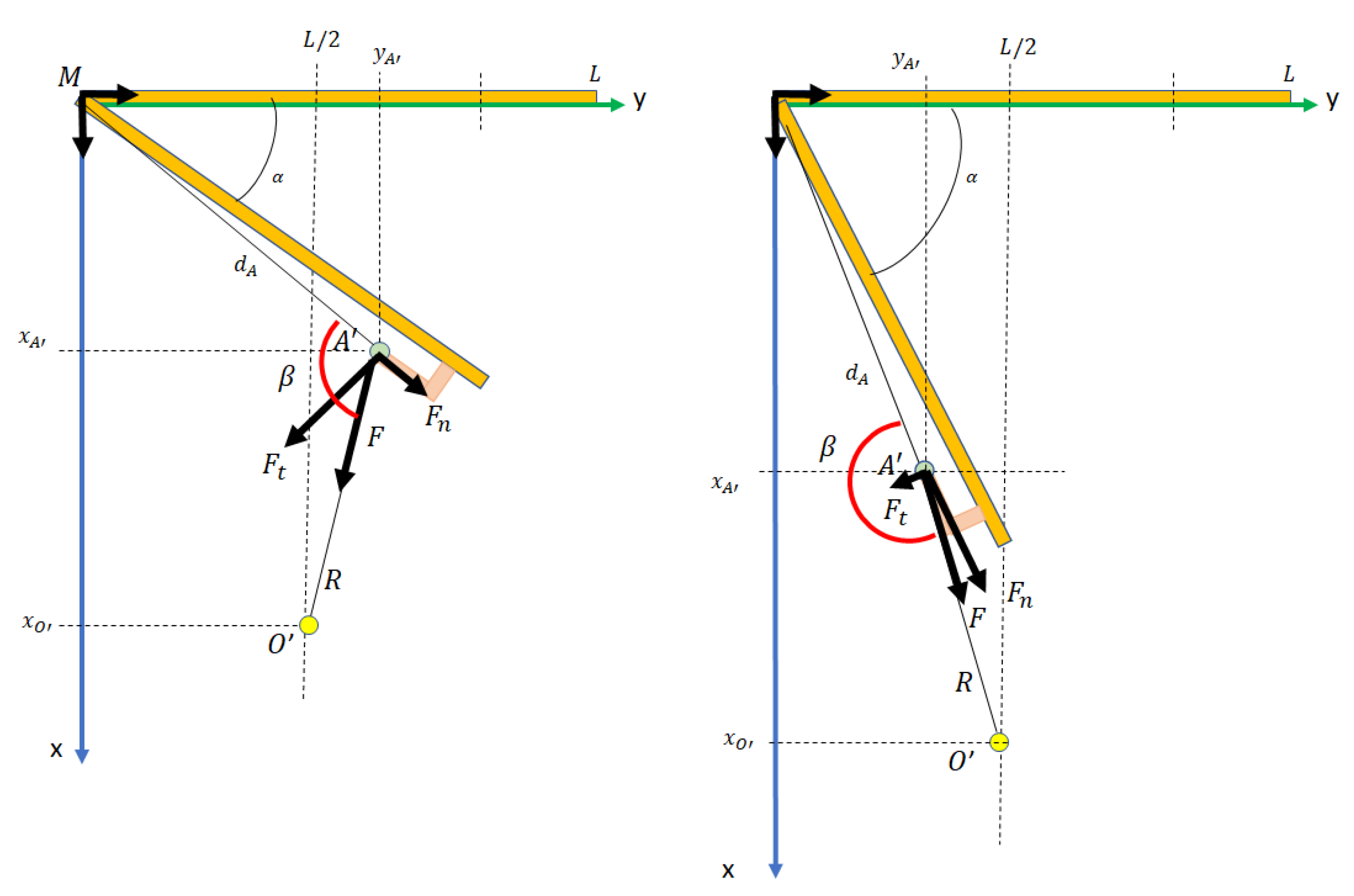
5.2. Phase 2. Unlocking the Door
- Unlocking the bolt. The end-effector, which comes into contact with A, will follow a circular path to release the bolt. Upon imposing an angular speed of the handle , the coordinates of the moving point A in the frame are:The movement is performed until exceeds a preset angle (usually . The time of the movement is .
- Releasing the bolt. In this step, the end effector moves back to release the bolt and performs the reverse path reaching the initial position. Finally, the components would be approximately the initials of point A. The equations of the end effector coordinates are:
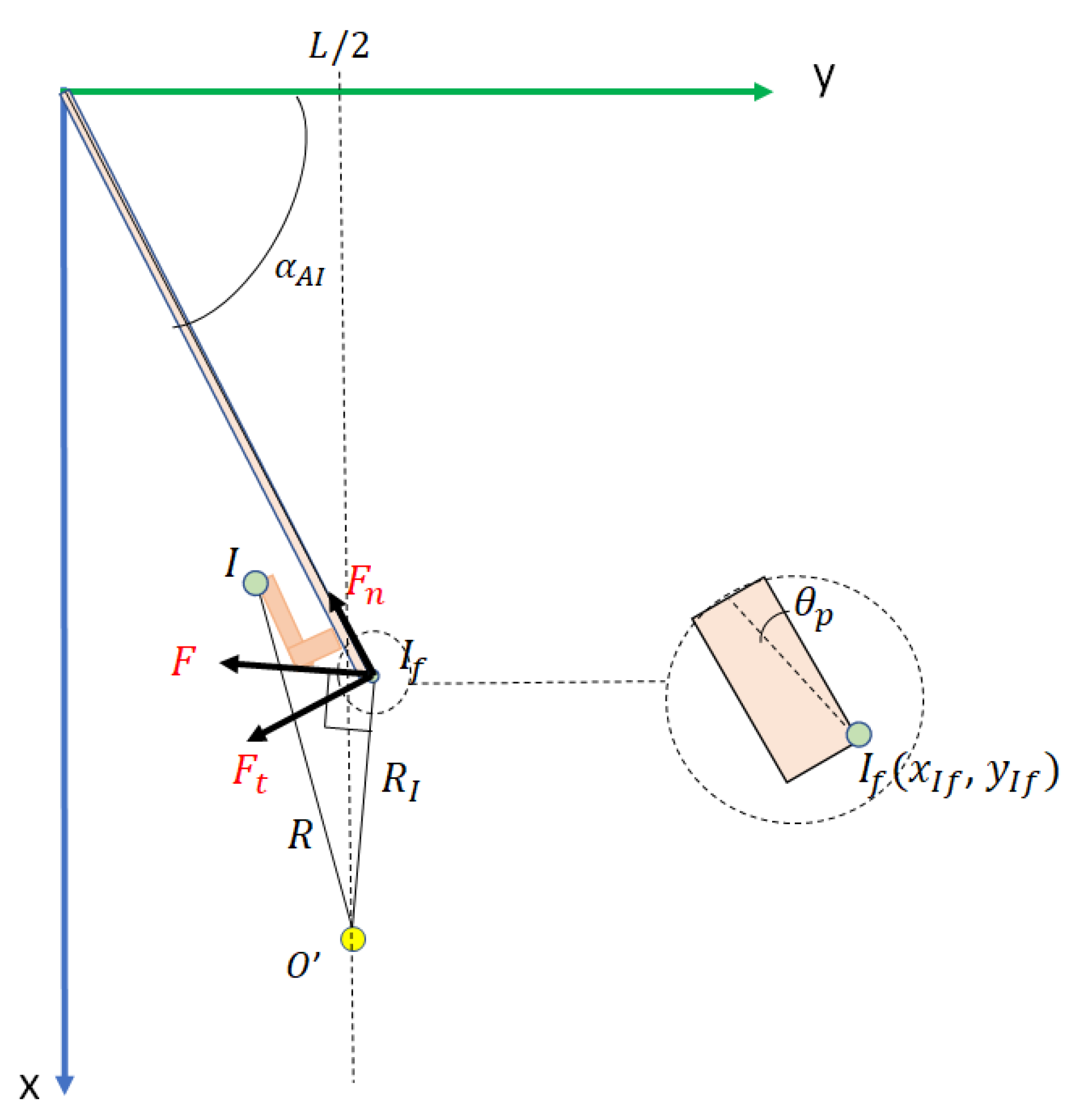
5.3. Phase 3. Door Pulling
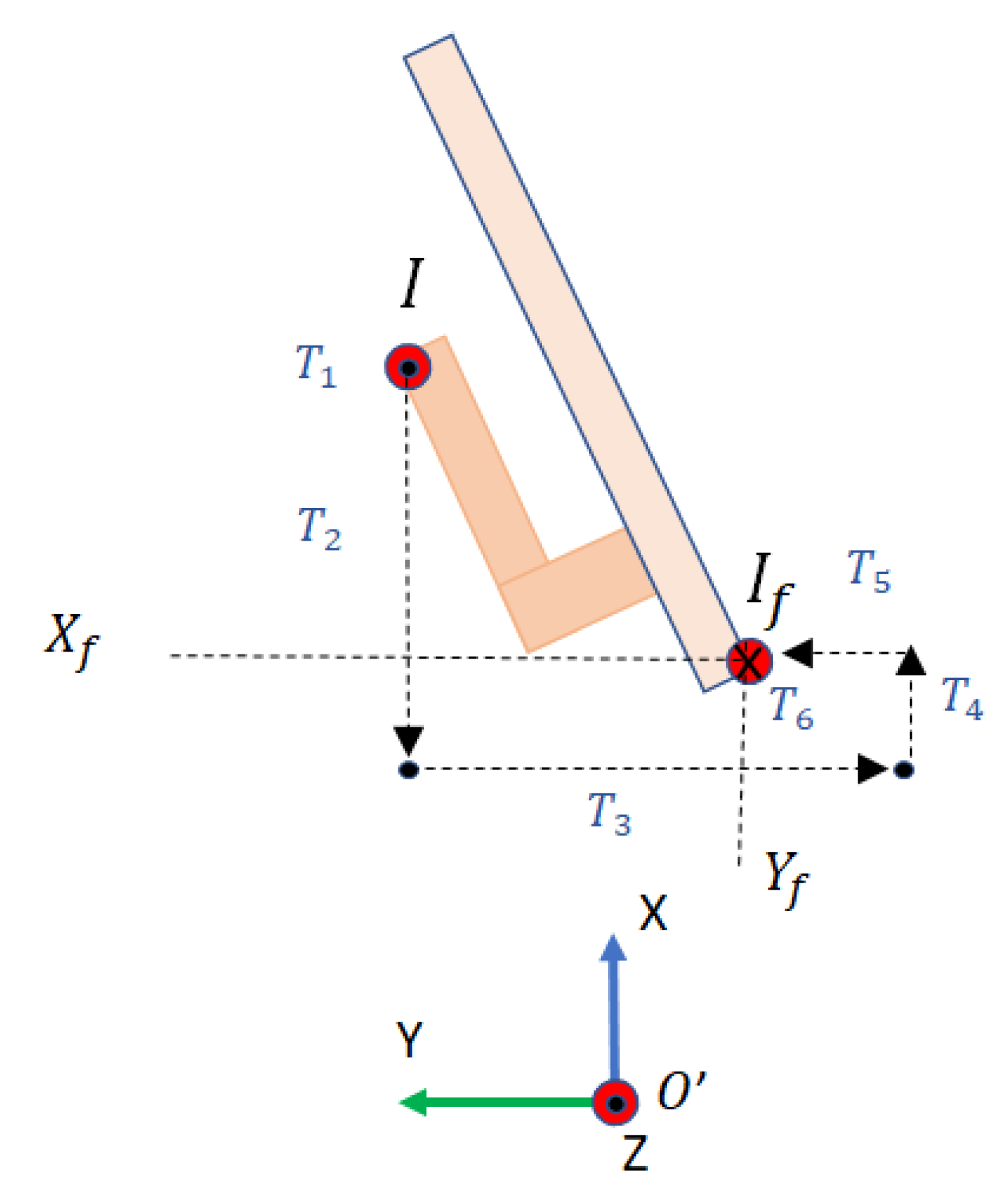
5.4. Phase 4. Handle Release and Trajectory to Door Edge
- Forward motion on Z. The Z coordinate is increased until , where is a safety margin. In our case cm.
- Backward motion on X. The X coordinate is decreased until , where is a safety margin. In our case cm.
- Backward on Y. The Y coordinate is decreased until , where is a safety margin. In our case cm.
- Forward on X. The original coordinates in Z and Y are maintained, and the X coordinate is increased until .
- Forward on Y. The original coordinates in Z and X are maintained, and the Y coordinate is increased until .
- Backward on Z. The original coordinates in X and Y are maintained, and the Z coordinate decreases until
5.5. Phase 5. Door Pushing
5.6. Phase 6. Door Traversal
6. Experimental Results
6.1. Open Doors
6.2. Closed Doors
7. Conclusions and Future Work
Supplementary Materials
Supplementary File 1Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hecht, J. Robot arm opens doors for wheelchair users. New Sci. 2009, 204, 25. [Google Scholar] [CrossRef]
- Andreopoulos, A.; Tsotsos, J.K. Active vision for door localization and door opening using playbot: A computer controlled wheelchair for people with mobility impairments. In Proceedings of the 5th Canadian Conference on Computer and Robot Vision, CRV 2008, Windsor, ON, Canada, 28–30 May 2008; pp. 3–10. [Google Scholar] [CrossRef]
- Farelo, F.; Alqasemi, R.; Dubey, R. Task-oriented control of a 9-DoF WMRA system for opening a spring-loaded door task. IEEE Int. Conf. Rehabil. Robot. 2011, 2011, 5975484. [Google Scholar] [CrossRef] [PubMed]
- Nagahama, K.; Takeshita, K.; Yaguchi, H.; Yamazaki, K.; Yamamoto, T.; Inaba, M. A Learning Method for a Daily Assistive Robot for Opening and Closing Doors Based on Simple Instructions. In Proceedings of the IEEE International Conference on Automation Science and Engineering, Munich, Germany, 20–24 August 2018; pp. 599–605. [Google Scholar] [CrossRef]
- Nagatani, K.; Yuta, S. Designing a behavior of a mobile robot equipped with a manipulator to open and pass through a door. Robot. Auton. Syst. 1996, 17, 53–64. [Google Scholar] [CrossRef]
- Nagatani, K.; Yuta, S. Designing strategy and implementation of mobile manipulator control system for opening door. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996; Volume 3, pp. 2828–2834. [Google Scholar] [CrossRef]
- DeDonato, M.; Dimitrov, V.; Du, R.; Giovacchini, R.; Knoedler, K.; Long, X.; Polido, F.; Gennert, M.A.; Padir, T.; Feng, S.; et al. Human-in-the-loop control of a humanoid robot for disaster response: A report from the DARPA robotics challenge trials. J. Field Robot. 2015, 32, 275–292. [Google Scholar] [CrossRef]
- Banerjee, N.; Long, X.; Du, R.; Polido, F.; Feng, S.; Atkeson, C.G.; Gennert, M.; Padir, T. Human-supervised control of the ATLAS humanoid robot for traversing doors. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Seoul, Korea, 3–5 November 2015; pp. 722–729. [Google Scholar] [CrossRef]
- Boston Dynamics: SpotMini. 2018. Available online: https://youtu.be/fUyU3lKzoio (accessed on 6 September 2019).
- Jain, A.; Kemp, C.C. Behaviors for robust door opening and doorway traversal with a force- sensing mobile manipulator. Presented at the Robotics: Science & Systems 2008 Manipulation Workshop—Intelligence in Human Environments, Zurich, Switzerland, 28 June 2008. [Google Scholar]
- Peterson, L.; Austin, D.; Kragic, D. High-level control of a mobile manipulator for door opening. In Proceedings of the 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2000) (Cat. No.00CH37113), Takamatsu, Japan, 31 October–5 November 2000; Volume 3, pp. 2333–2338. [Google Scholar] [CrossRef]
- Karayiannidis, Y.; Smith, C.; Barrientos, F.E.V.; Ogren, P.; Kragic, D. An Adaptive Control Approach for Opening Doors and Drawers under Uncertainties. IEEE Trans. Robot. 2016, 32, 161–175. [Google Scholar] [CrossRef]
- Gao, H.; Ma, C.; Ding, L.; Yu, H.; Xia, K.; Xing, H.; Deng, Z. Dynamic Modeling and Experimental Validation of Door-Opening Process by a Mobile Manipulator. IEEE Access 2019, 7, 80916–80927. [Google Scholar] [CrossRef]
- Axelrod, B.; Huang, W.H. Autonomous door opening and traversal. In Proceedings of the IEEE Conference on Technologies for Practical Robot Applications, TePRA, Woburn, MA, USA, 11–12 May 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Zhuang, Y.; Lin, X.; Hu, H.; Guo, G. Using scale coordination and semantic information for robust 3-D object recognition by a service robot. IEEE Sens. J. 2015, 15, 37–47. [Google Scholar] [CrossRef]
- Rusu, R.B.; Meeussen, W.; Chitta, S.; Beetz, M. Laser-based perception for door and handle identification. In Proceedings of the 2009 International Conference on Advanced Robotics, ICAR 2009, Munich, Germany, 22–26 June 2009; pp. 1–8. [Google Scholar]
- Adiwahono, A.H.; Chua, Y.; Tee, K.P.; Liu, B. Automated door opening scheme for non-holonomic mobile manipulator. In Proceedings of the International Conference on Control, Automation and Systems, Gwangju, Korea, 20–23 October 2013; pp. 839–844. [Google Scholar] [CrossRef]
- Li, J.; Tao, J.; Ding, L.; Gao, H.; Deng, Z.; Xia, K. Twisting door handles and pulling open doors with a mobile manipulator. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics, IEEE-ROBIO, Zhuhai, China, 6–9 December 2015; pp. 686–691. [Google Scholar] [CrossRef]
- Chen, C.C.; Li, J.S.; Luo, J.; Xie, S.R.; Li, H.Y.; Pu, H.Y.; Gu, J. Robust adaptive position and force tracking control strategy for door-opening behaviour. Int. J. Simul. Model. 2016, 15, 423–435. [Google Scholar] [CrossRef]
- Quintana, B.; Prieto, S.A.; Adán, A.; Vázquez, A.S. Semantic scan planning for indoor structural elements of buildings. Adv. Eng. Inform. 2016, 30, 643–659. [Google Scholar] [CrossRef]
- Prieto, S.A.; Quintana, B.; Adán, A.; Vázquez, A.S. As-is building-structure reconstruction from a probabilistic next best scan approach. Robot. Auton. Syst. 2017, 94, 186–207. [Google Scholar] [CrossRef]
- Koenig, N.; Howard, A. Design and use paradigms for Gazebo, an open-source multi-robot simulator. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2149–2154. [Google Scholar] [CrossRef]
- Quintana, B.; Prieto, S.A.; Adán, A.; Bosché, F. Door detection in 3D coloured point clouds of indoor environments. Autom. Constr. 2018, 85, 146–166. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link | ||||
|---|---|---|---|---|
| 1 | 0 | |||
| 2 | 0 | |||
| 3 | 0 | |||
| 4 | 0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prieto, S.A.; Adán, A.; Vázquez, A.S.; Quintana, B. Passing through Open/Closed Doors: A Solution for 3D Scanning Robots. Sensors 2019, 19, 4740. https://doi.org/10.3390/s19214740
Prieto SA, Adán A, Vázquez AS, Quintana B. Passing through Open/Closed Doors: A Solution for 3D Scanning Robots. Sensors. 2019; 19(21):4740. https://doi.org/10.3390/s19214740
Chicago/Turabian StylePrieto, Samuel A., Antonio Adán, Andrés S. Vázquez, and Blanca Quintana. 2019. "Passing through Open/Closed Doors: A Solution for 3D Scanning Robots" Sensors 19, no. 21: 4740. https://doi.org/10.3390/s19214740
APA StylePrieto, S. A., Adán, A., Vázquez, A. S., & Quintana, B. (2019). Passing through Open/Closed Doors: A Solution for 3D Scanning Robots. Sensors, 19(21), 4740. https://doi.org/10.3390/s19214740