Robust Detection for Chipless RFID Tags Based on Compact Printable Alphabets

Abstract
:1. Introduction
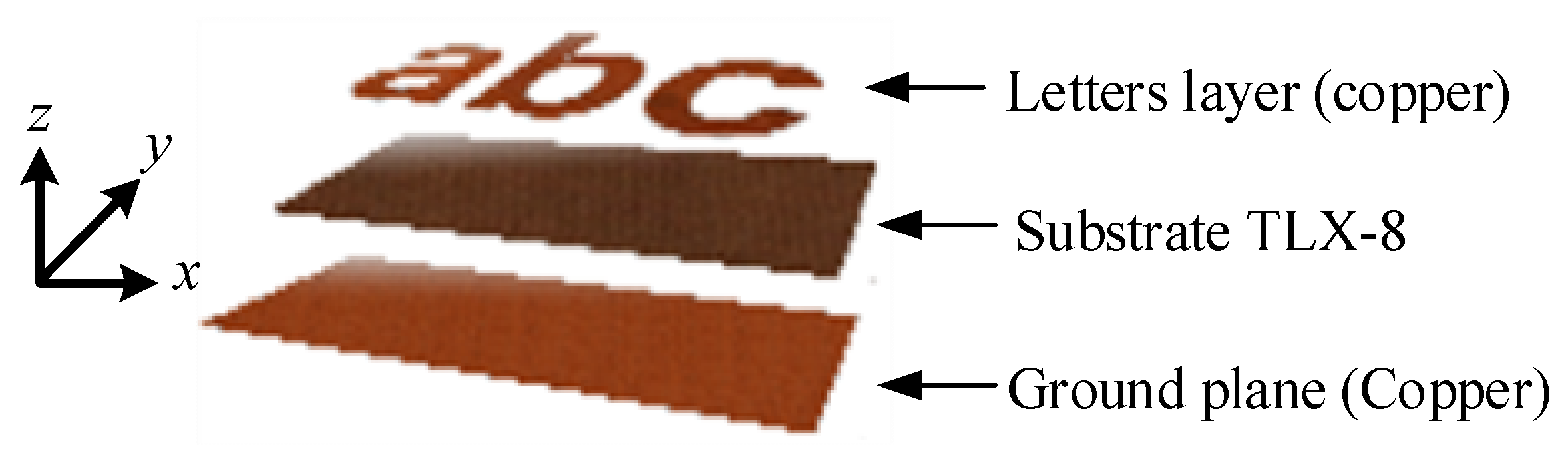
2. Design of Chipless Tag Alphabet Letters
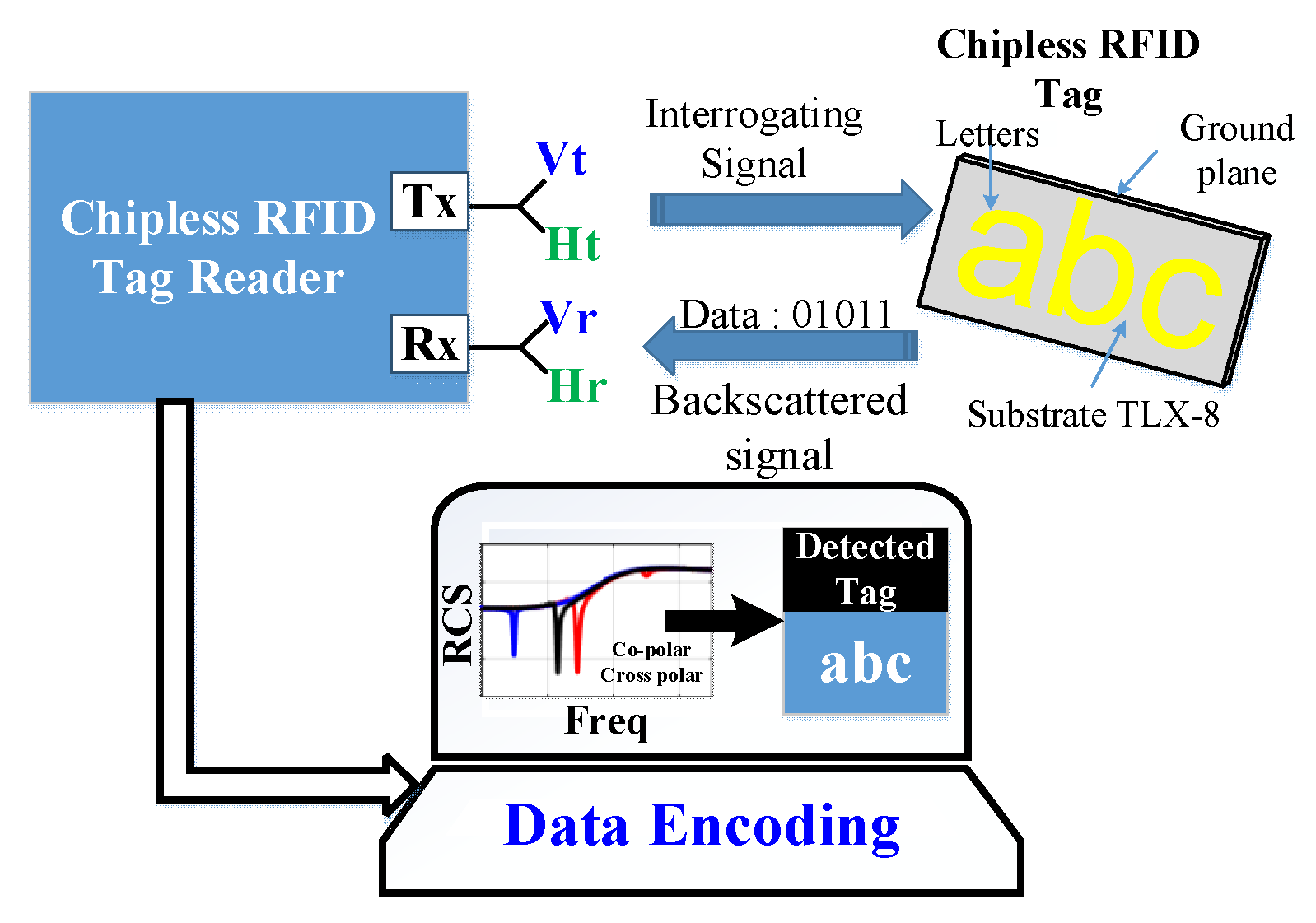
3. Working Principle
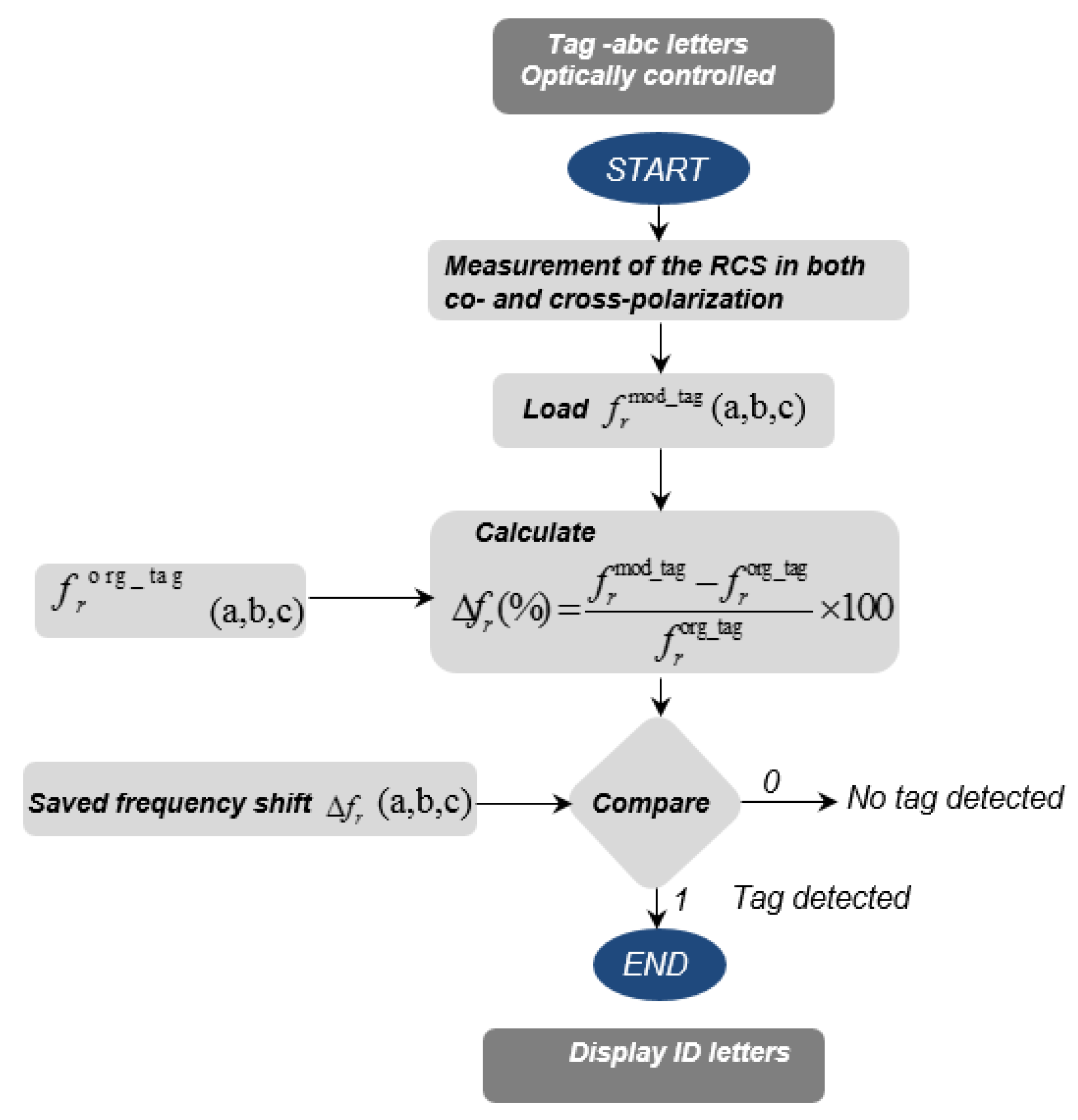
3.1. Working Principle of Proposed Chipless Letters-ID
3.2. Resonant Metallic Letters
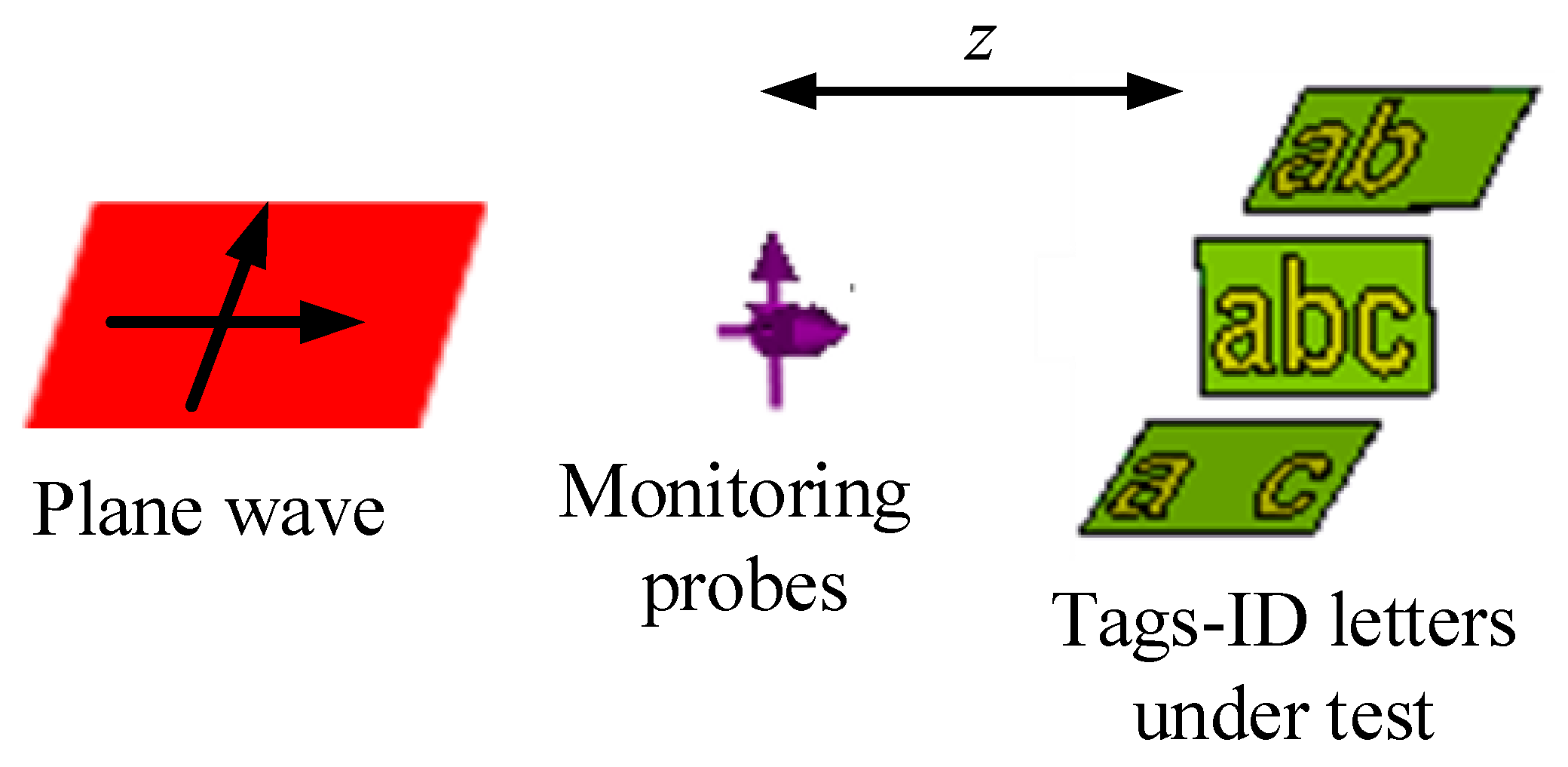
4. Simulation Method
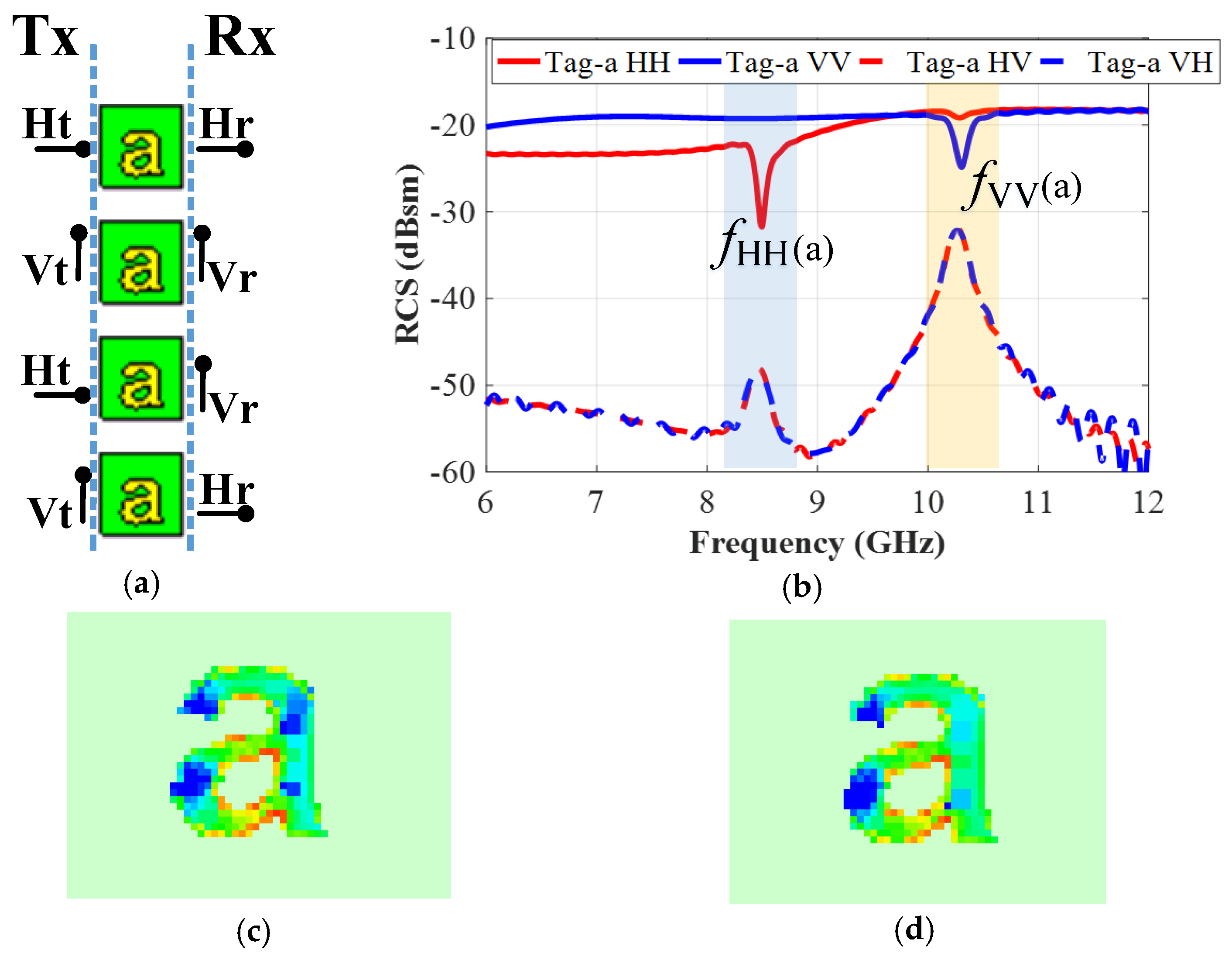
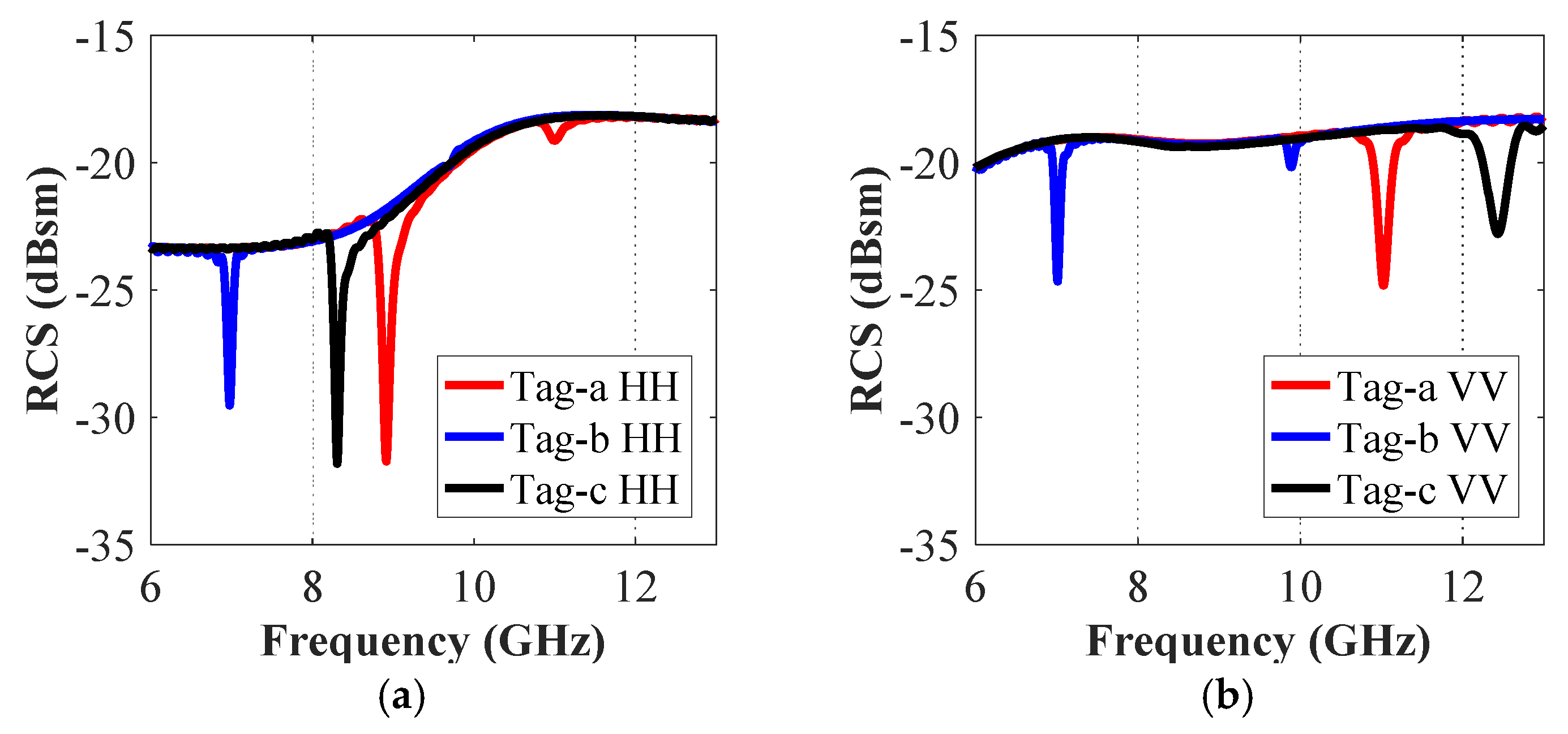
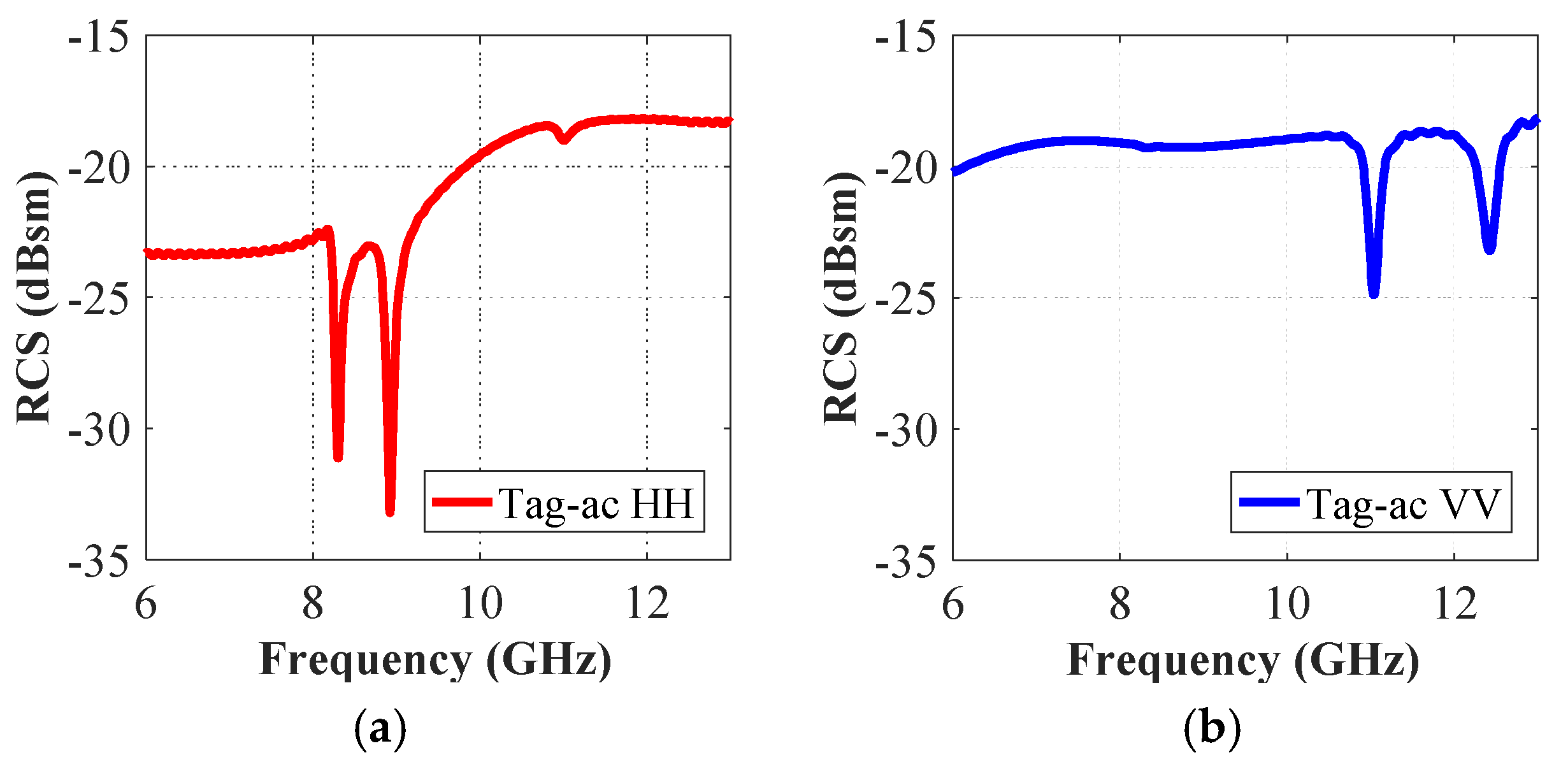
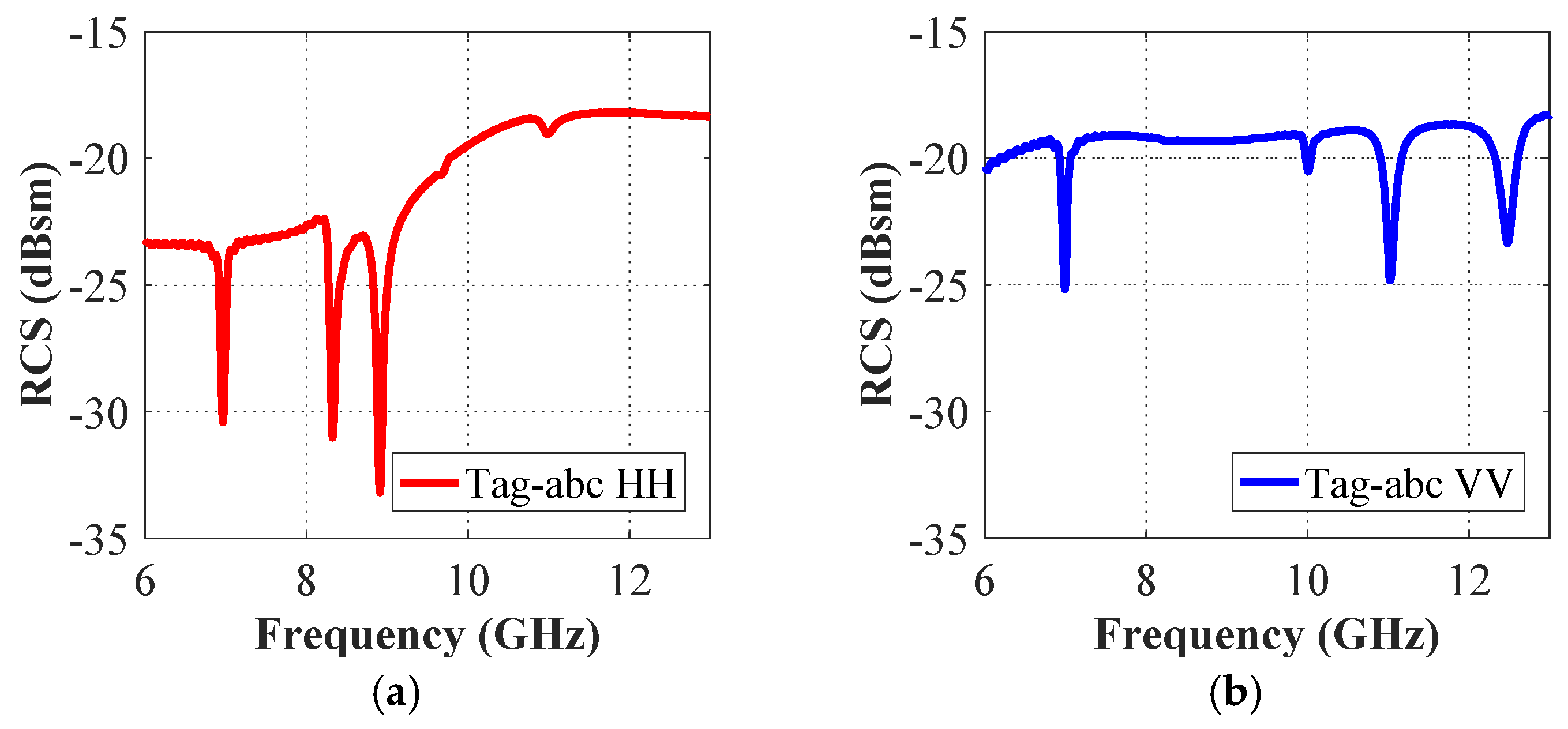
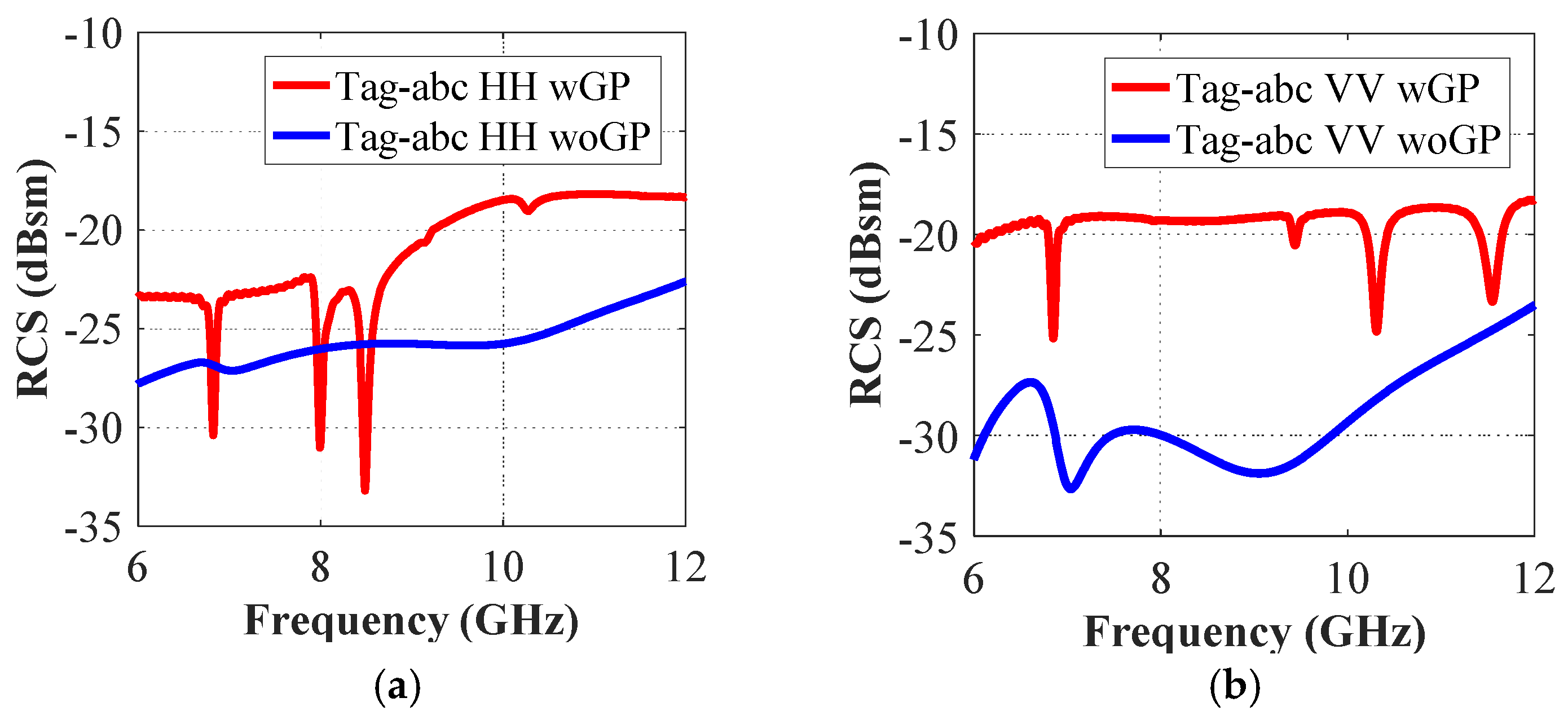
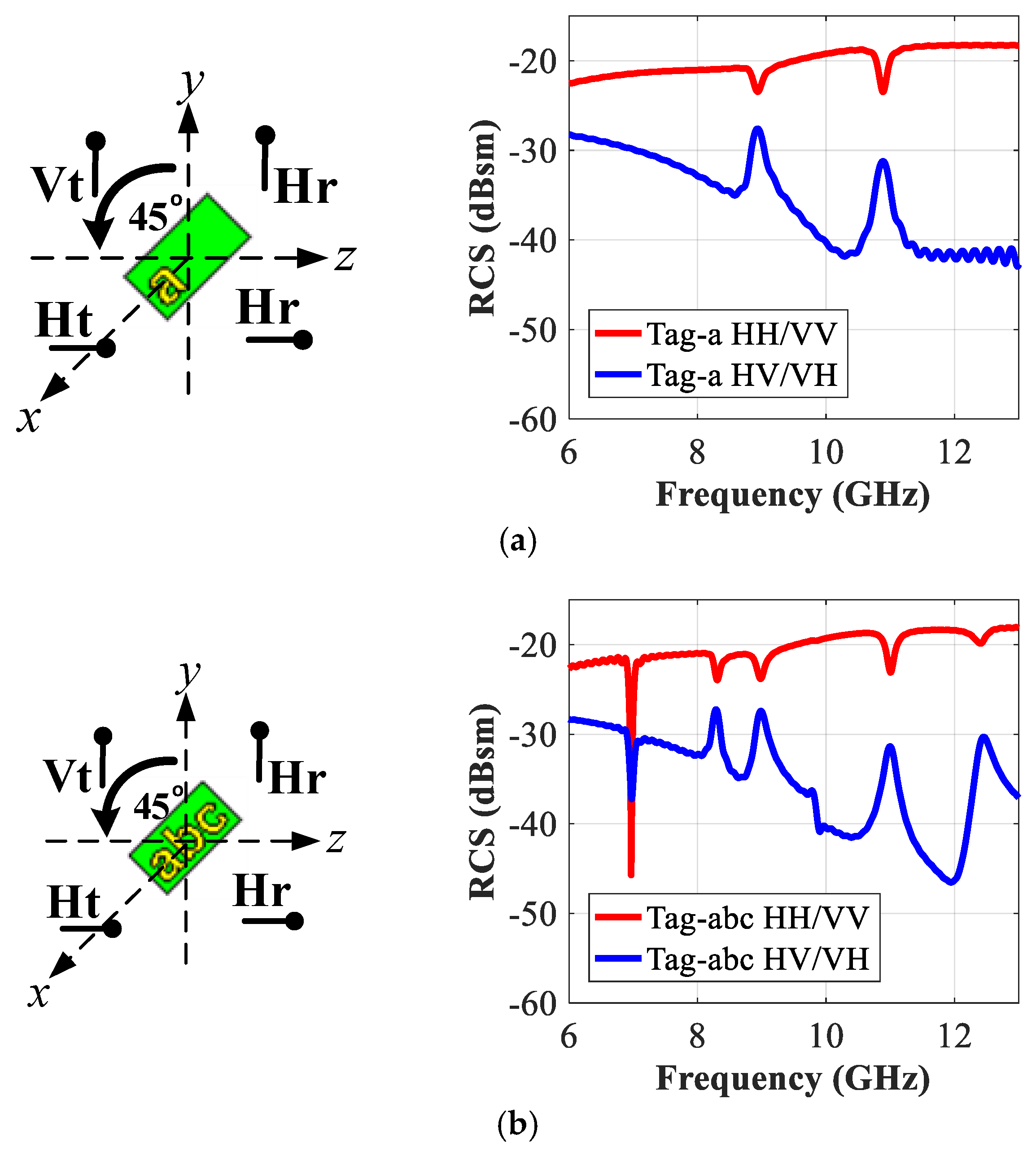
4.1. Co-Polar Detection of Alphabet Tag-IDs
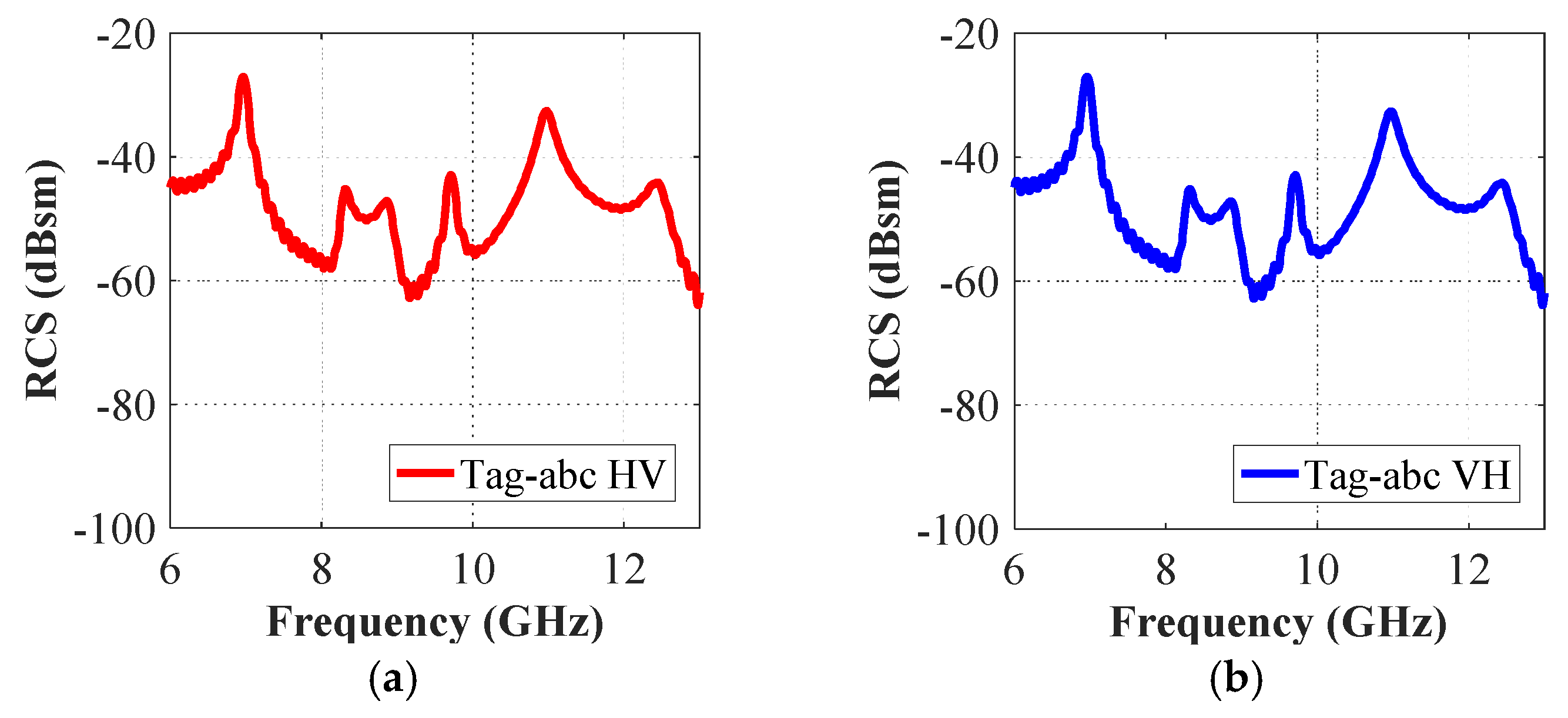
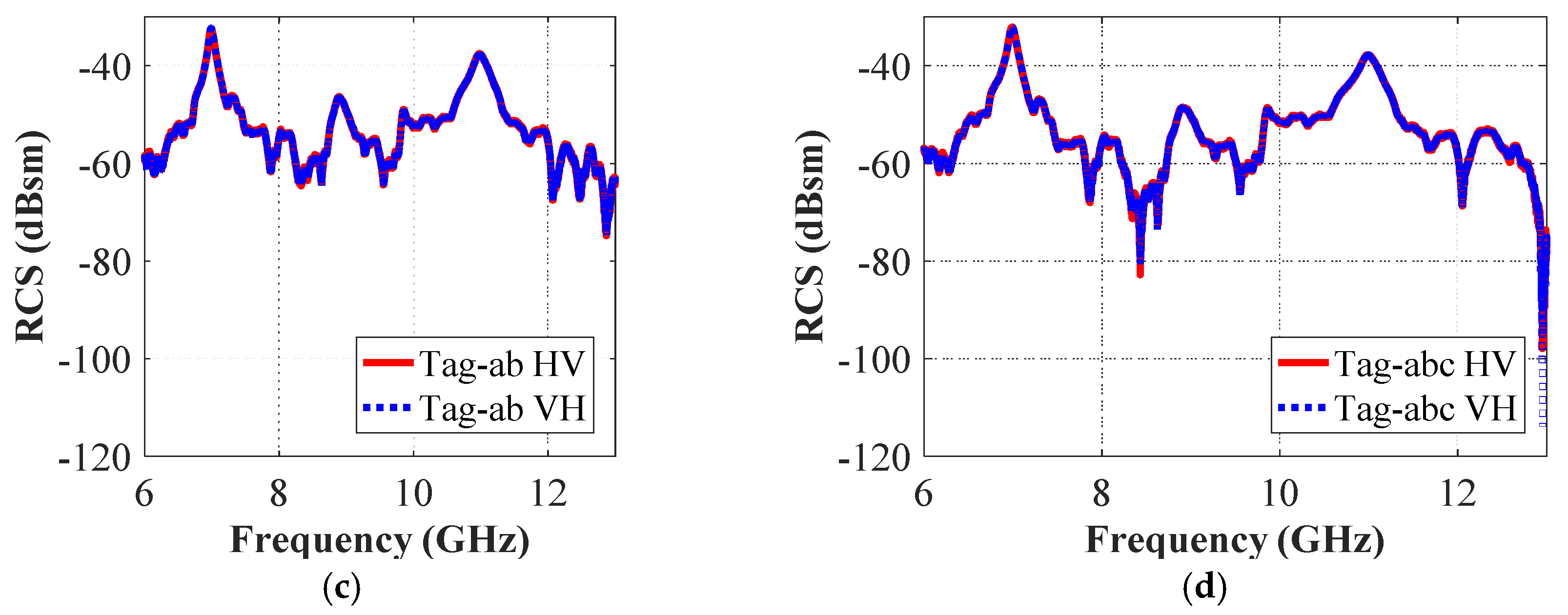
4.2. Cross-Polar Detection of Alphabet Tag-IDs
5. Impact of Tag Modification on the Resonance Properties of the Tag
5.1. Impact of 45° Polarization on the RCS Response
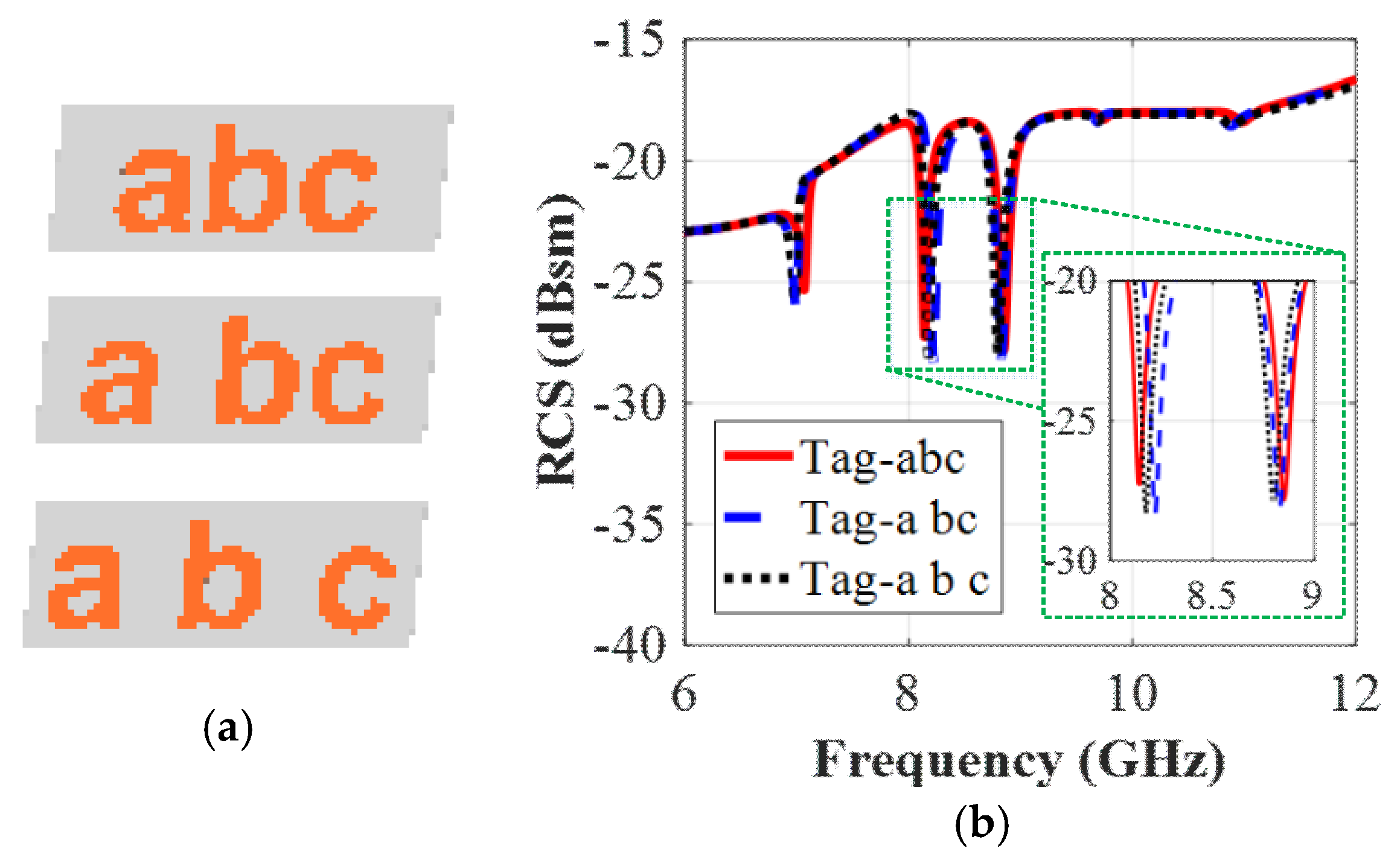
5.2. Effect of the Space Between the Letters on the RCS Response
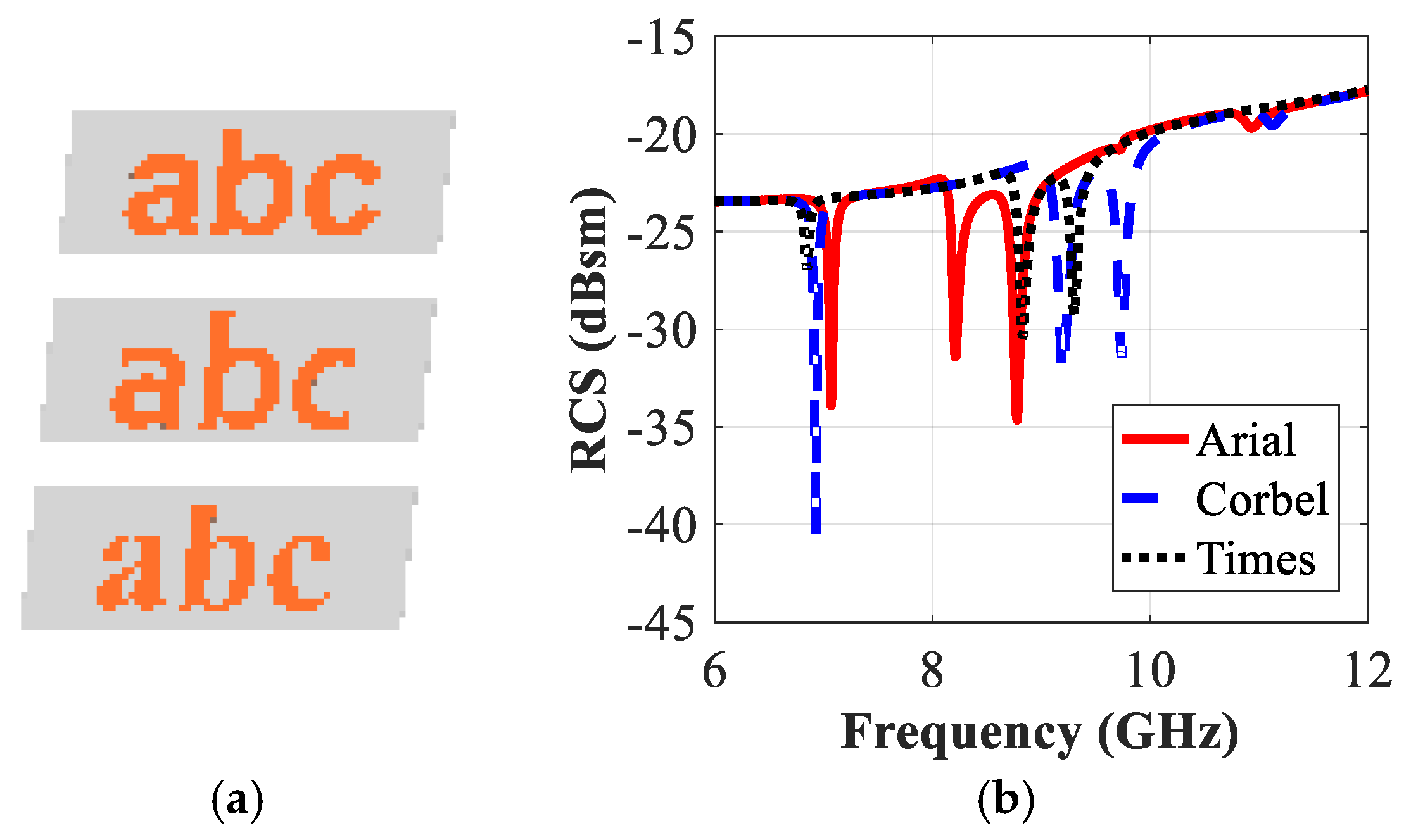
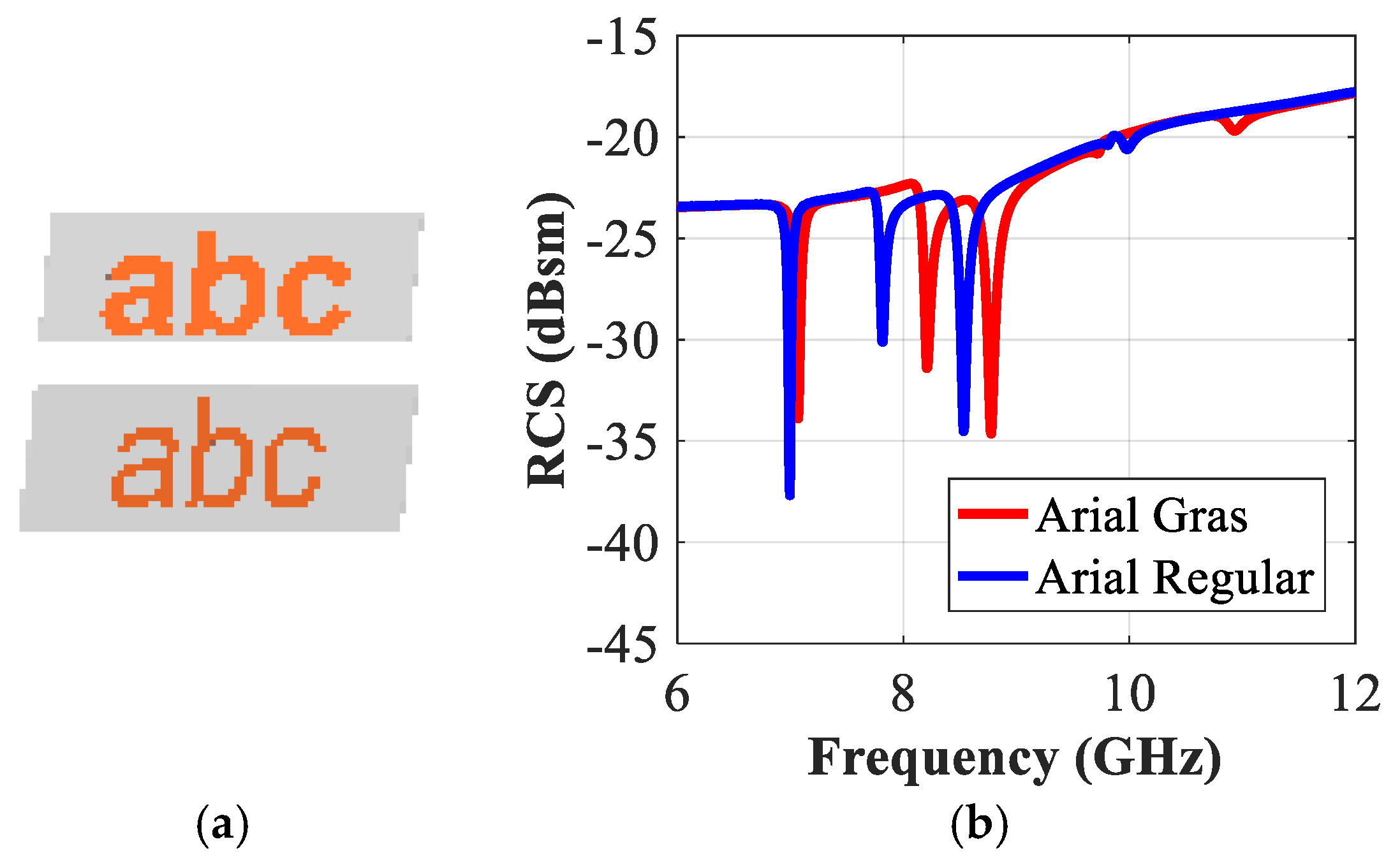
5.3. Impact of the Letters Font Type on the RCS Response
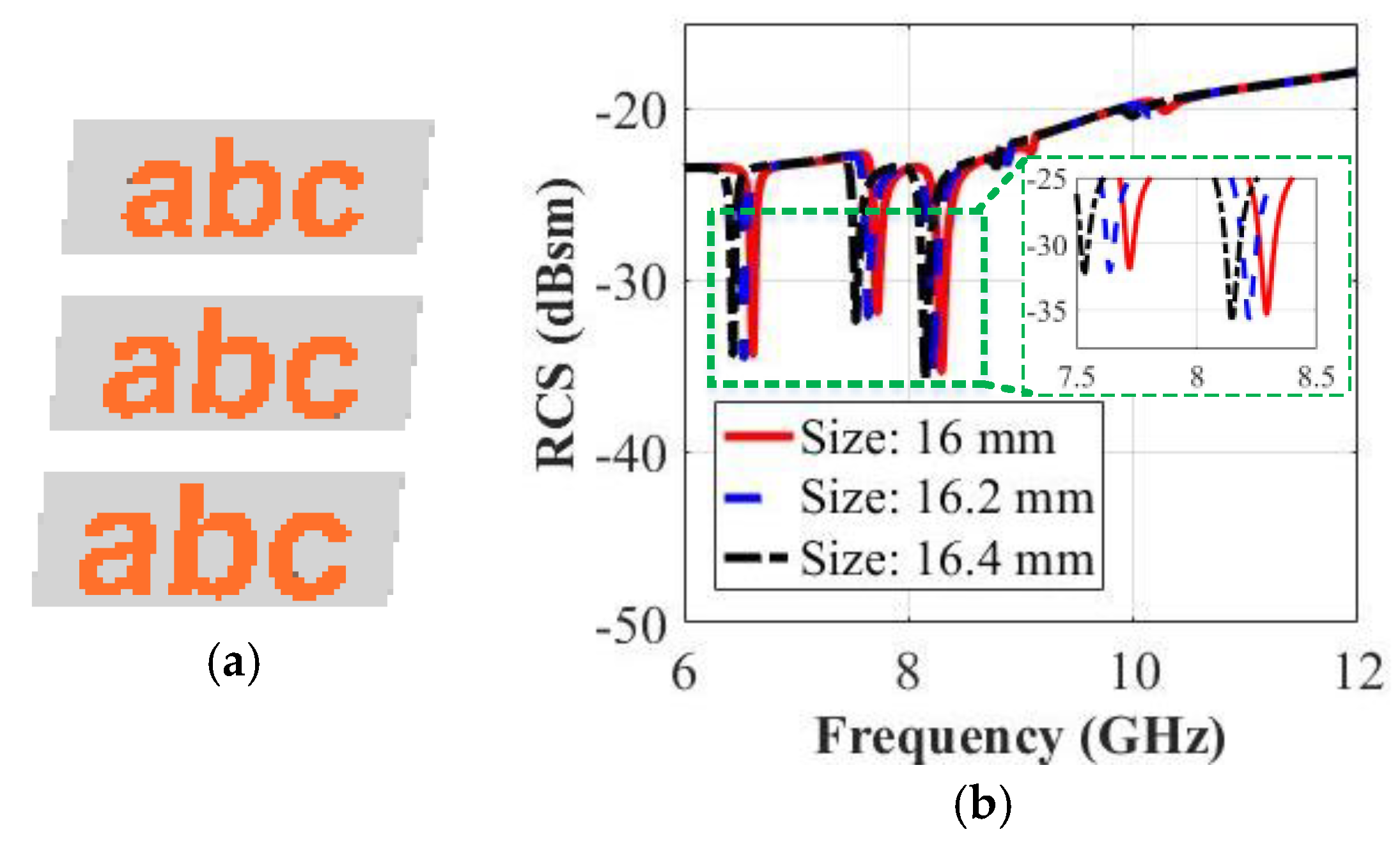
5.4. Impact of Font Size (Height) of the Letter on Its RCS Responses
6. Developed Encoding Method for Chipless Tag-IDs and Coding Density
6.1. Encoding of Chipless Alphabet-Based Tags
6.2. Shift Frequency Method and Coding Density
7. Experimental Verification
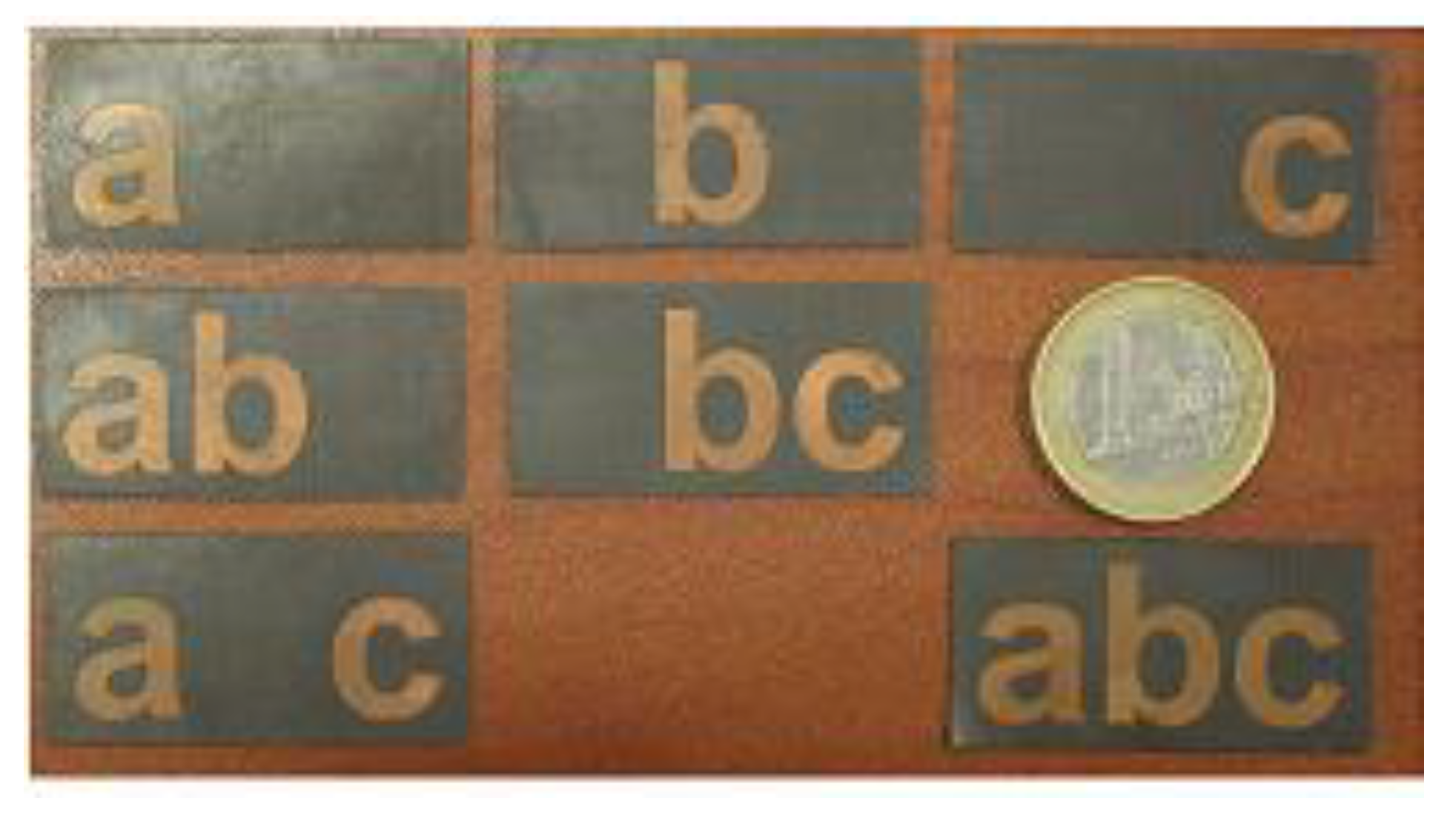
7.1. Realization of Letter-Tag IDs
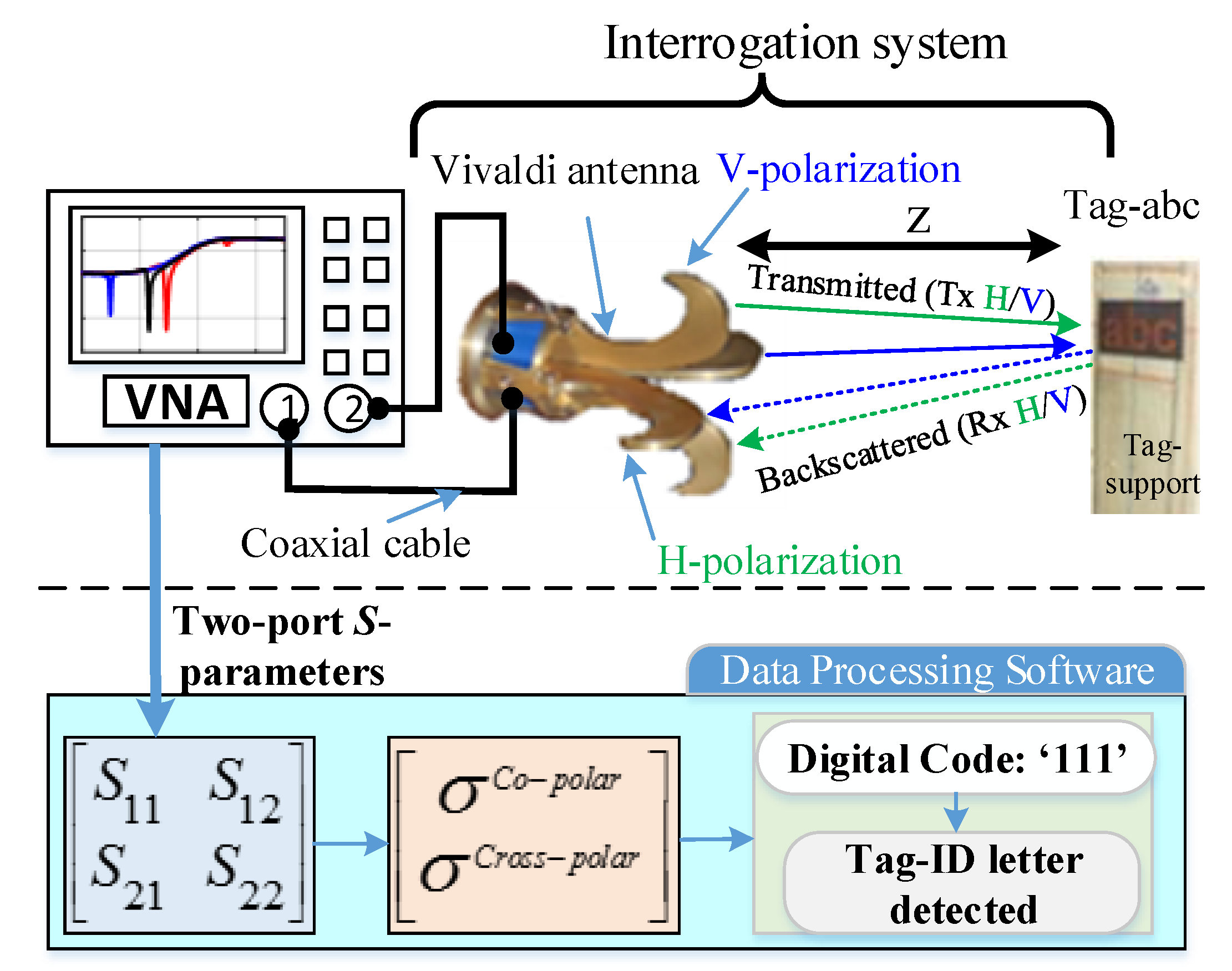
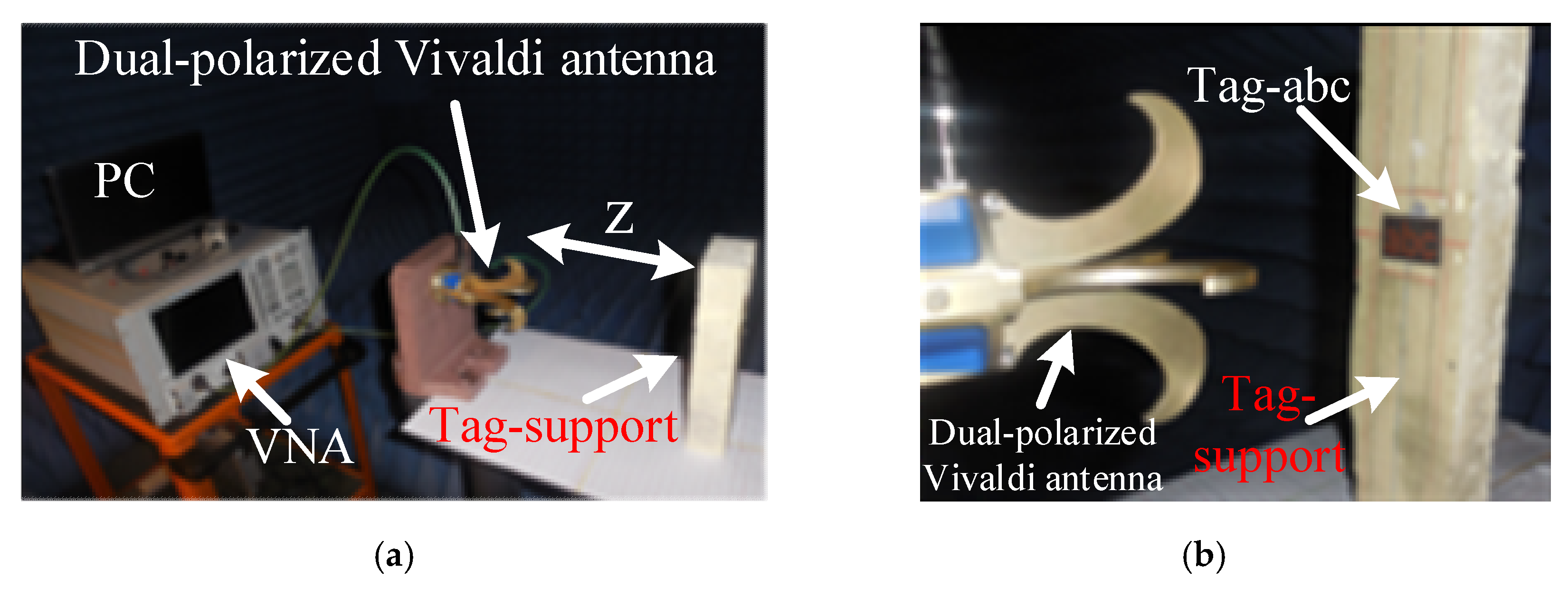
7.2. Measurement Setup
7.3. Recording of Measurement Data
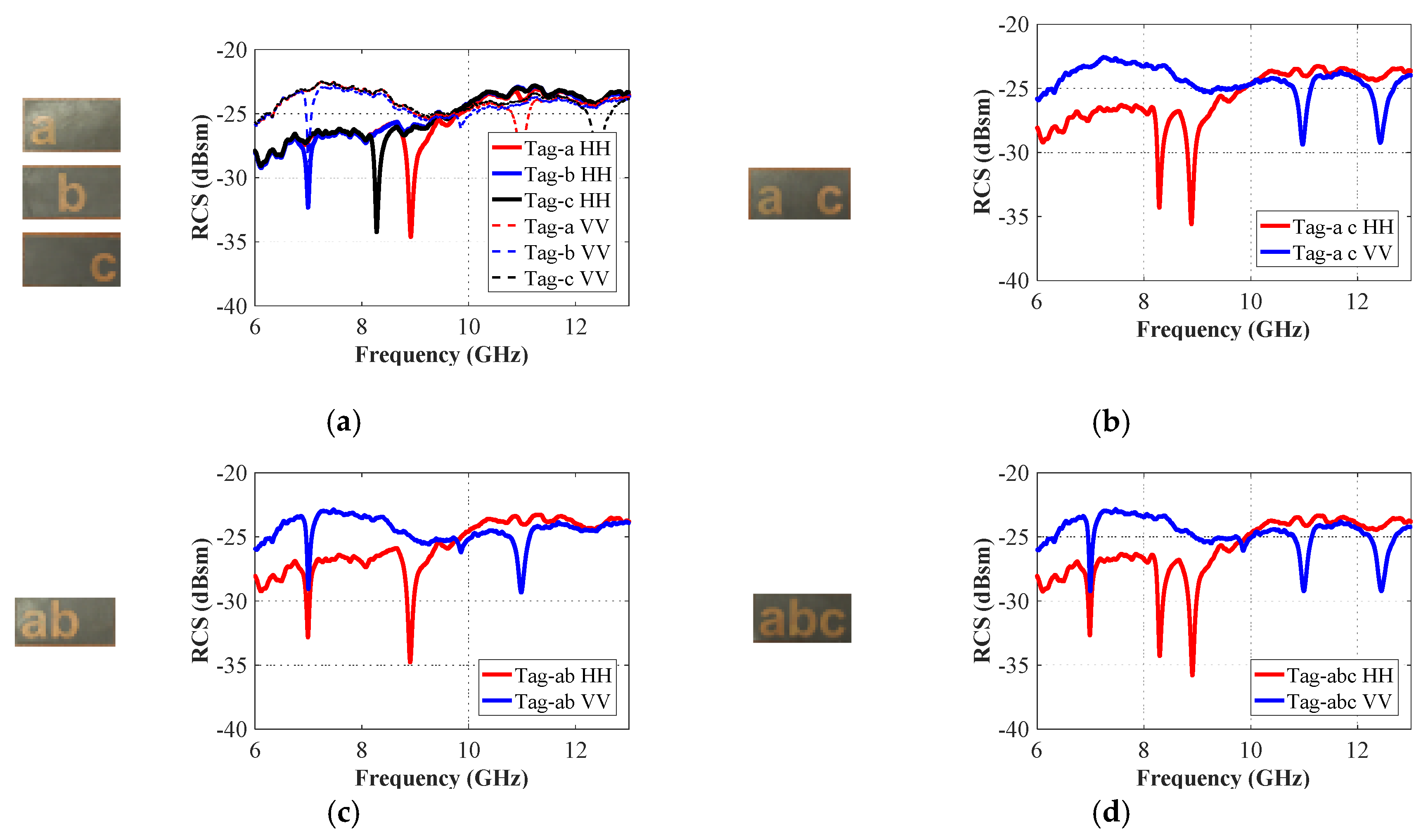
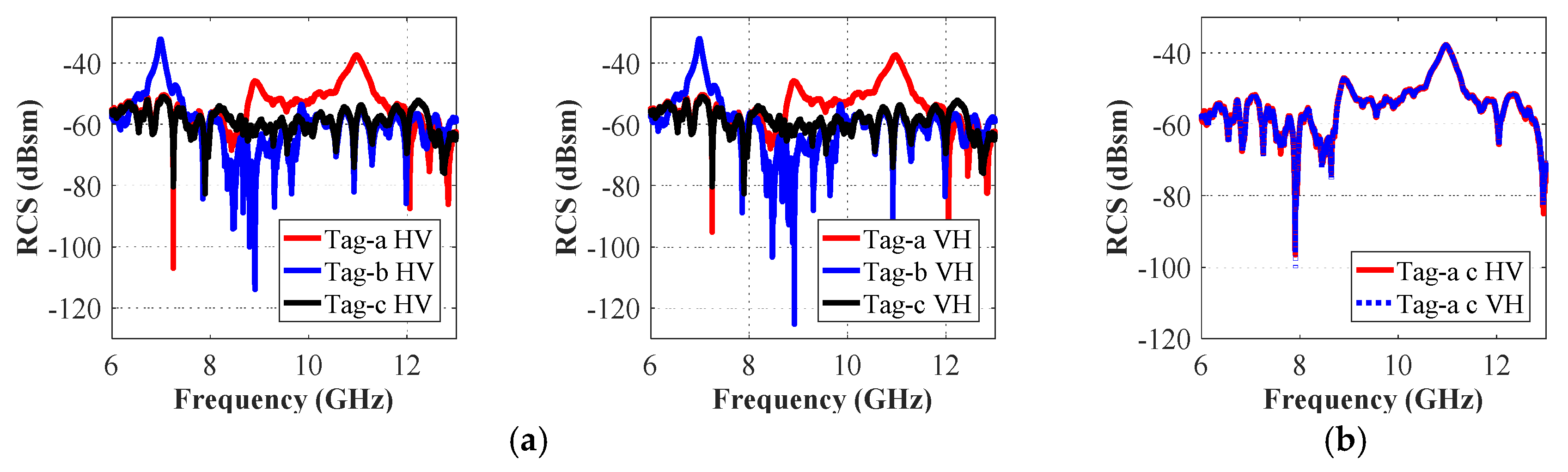
7.4. Measurement Results and Validation
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Arjomandi, L.M.; Khadka, G.; Xiong, Z.; Karmakar, N.C.; Zixang, X. Document Verification: A Cloud-Based Computing Pattern Recognition Approach to Chipless RFID. IEEE Access. 2018, 6, 78007–78015. [Google Scholar] [CrossRef]
- Boularess, O.; Rmili, H.; Aguili, T.; Tedjini, S. Analysis of electromagnetic signature of Arabic alphabet as RF elementary coding particles. Wirel. Power Transf. 2015, 2, 97–106. [Google Scholar] [CrossRef]
- Rmili, H.; Oueslati, D.; Ladhar, L.; Sheikh, M. Design of a chipless RFID tags based on natural fractal geometries for security applications. Microw. Opt. Technol. Lett. 2016, 58, 75–82. [Google Scholar] [CrossRef]
- Islam, M.A.; Karmakar, N.C. Compact Printable Chipless RFID Systems. IEEE Trans. Microw. Theory Tech. 2015, 63, 3785–3793. [Google Scholar] [CrossRef]
- Issa, K.; Alshoudokhi, Y.A.; Ashraf, M.A.; AlShareef, M.R.; Behairy, H.M.; Alshebeili, S.; Fathallah, H. A High-Density L-Shaped Backscattering Chipless Tag for RFID Bistatic Systems. Int. J. Antennas Propag. 2018, 2018, 1542520. [Google Scholar] [CrossRef]
- Andriamiharivolamena, T.; Vena, A.; Perret, E.; Lemaître-Auger, P.; Tedjini, S. Chipless identification applied to human body. In Proceedings of the IEEE RFID Technology and Applications Conference (RFID-TA), Tampere, Finland, 8–9 September 2014; pp. 241–245. [Google Scholar]
- Balbin, I.; Karmakar, N. Phase-Encoded Chipless RFID Transponder for Large-Scale Low-Cost Applications. IEEE Microw. Wirel. Compon. Lett. 2009, 19, 509–511. [Google Scholar] [CrossRef]
- Preradovic, S.; Balbin, I.; Karmakar, N.; Swiegers, G. Multiresonator-Based Chipless RFID System for Low-Cost Item Tracking. IEEE Trans. Microw. Theory Tech. 2009, 57, 1411–1419. [Google Scholar] [CrossRef]
- McVay, J.; Hoorfar, A.; Engheta, N. Space-filling curve RFID tags. In Proceedings of the IEEE Radio and Wireless Symposium, San Diego, CA, USA, 17–19 October 2006; pp. 199–202. [Google Scholar]
- Plessky, V.P.; Reindl, L.M. Review on SAW RFID tags. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2010, 57, 654–668. [Google Scholar] [CrossRef]
- Herrojo, C.; Moras, M.; Paredes, F.; Núñez, A.; Ramon, E.; Mata-Contreras, J.; Martín, F. Very Low-Cost 80-Bit Chipless-RFID Tags Inkjet Printed on Ordinary Paper. Technology 2018, 6, 52. [Google Scholar] [CrossRef]
- Karmakar, N.C.; Zomorrodi, M.; Divarathne, C. Advanced Chipless RFID: MIMO-Based Imaging at 60 GHz-ML Detection; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Necibi, O.; Beldi, S.; Gharsallah, A.O.N. Design of a chipless RFID tag using cascaded and parallel spiral resonators at 30 GHz. In Proceedings of the 2nd World Symposium on Web Applications and Networking (WSWAN), Sousse, Tunisia, 21–23 March 2015; pp. 1–5. [Google Scholar]
- Singh, T.; Tedjini, S.; Perret, E.; Vena, A. A frequency signature based method for the RF identification of letters. In Proceedings of the IEEE International Conference on RFID, Orlando, FL, USA, 12–14 April 2011; pp. 1–5. [Google Scholar]
- Ni, Y.-Z.; Huang, X.-D.; Lv, Y.-P.; Cheng, C.-H. Hybrid coding chipless tag based on impedance loading. IET Microw. Antennas Propag. 2017, 11, 1325–1331. [Google Scholar] [CrossRef]
- Karmaker, N.C. Tag, You’re It Radar Cross Section of Chipless RFID Tags. IEEE Microw. Mag. 2016, 17, 64–74. [Google Scholar] [CrossRef]
- Vena, A.; Perret, E.; Tedjini, S. Chipless RFID Tag Using Hybrid Coding Technique. IEEE Trans. Microw. Theory Tech. 2011, 59, 3356–3364. [Google Scholar] [CrossRef] [Green Version]
- Grishin, A.M.; Mays, R.M. Microwave Readable Dielectric Barcode. U.S. Patent No. 7,205,774, 17 April 2007. [Google Scholar]
- Mukherjee, S.; Chakraborty, G. Chipless RFID using stacked multilayer patches. In Proceedings of the Applied Electromagnetics Conference (AEMC), Kolkata, India, 14–16 December 2009; pp. 1–4. [Google Scholar]
- Vena, A.; Perret, E.; Tedjini, S. Chipless RFID Based on RF Encoding Particle: Realization, Coding and Reading System; Elsevier: Amsterdam, The Netherlands, 2016. [Google Scholar]
- Demir, M.A.; Mutlu, F. Design of Highly Distinguishable Letters for Inkjet-Printed Chipless RFID Tags. In Proceedings of the IEEE-APS Topical Conference on Antennas and Propagation in Wireless Communications (APWC), Cartagena des Indias, Colombia, 10–14 September 2018; pp. 783–786. [Google Scholar]
- Vena, A.; Perret, E.; Tedjini, S. A Fully Printable Chipless RFID Tag With Detuning Correction Technique. IEEE Microw. Wirel. Compon. Lett. 2012, 22, 209–211. [Google Scholar] [CrossRef] [Green Version]
- Anee, R.; Karmakar, N.C. Chipless RFID Tag Localization. IEEE Trans. Microw. Theory Tech. 2013, 61, 4008–4017. [Google Scholar] [CrossRef]
- Ramos, A.; Perret, E.; Rance, O.; Tedjini, S.; Lazaro, A.; Girbau, D. Temporal Separation Detection for Chipless Depolarizing Frequency-Coded RFID. IEEE Trans. Microw. Theory Tech. 2016, 64, 2326–2337. [Google Scholar] [CrossRef]
- Keskilammi, M.; Kivikoski, M. Using text as a meander line for RFID transponder antennas. IEEE Antennas Wirel. Propag. Lett. 2004, 3, 372–374. [Google Scholar] [CrossRef]
- Tedjini, S.; Boularess, O.; Andriamiharivolamena, T.; Rmili, H.; Aguili, T. A novel design of chipless RFID tags based on alphabets. In Proceedings of the IEEE MTT-S International Microwave Symposium (IMS), Honololu, HI, USA, 4–9 June 2017; pp. 1561–1563. [Google Scholar]
- Vena, A.; Singh, T.; Tedjini, S.; Perret, E. Metallic letter identification based on radar approach. In Proceedings of the XXXth URSI General Assembly and Scientific Symposium, Istanbul, Turkey, 13–20 August 2011; pp. 1–4. [Google Scholar]
- Vena, A.; Perret, E.; Tedjini, S. High-Capacity Chipless RFID Tag Insensitive to the Polarization. IEEE Trans. Antennas Propag. 2012, 60, 4509–4515. [Google Scholar] [CrossRef]
- Necibi, O.; Naoui, S.; Gharsallah, A. Design of a chipless RFID TAG based on the frequency shift technique for K band. In Proceedings of the 2nd International Conference on Advanced Technologies for Signal and Image Processing (ATSIP), Monastir, Tunisia, 21–23 March 2016; pp. 816–819. [Google Scholar]
- Hotte, D.; Siragusa, R.; Duroc, Y.; Tedjini, S. Radar cross-section measurement in millimetre-wave for passive millimetre-wave identification tags. IET Microw. Antennas Propag. 2015, 9, 1733–1739. [Google Scholar] [CrossRef]
- Jing, C.; Sun, T.; Chen, Q.; Du, M.; Wang, M.; Wang, S.; Wang, J. A Robust Noise Mitigation Method for the Mobile RFID Location in Built Environment. Sensors 2019, 19, 2143. [Google Scholar] [CrossRef]
- Manekiya, M.; Donelli, M.; Kumar, A.; Menon, K.S. A Novel Detection Technique for a Chipless RFID System Using Quantile Regression. Electronics 2018, 7, 409. [Google Scholar] [CrossRef]
- Khadka, G.; Hwang, S.-S. Tag-to-Tag Interference Suppression Technique Based on Time Division for RFID. Sensors 2017, 17, 409. [Google Scholar] [CrossRef] [PubMed]
- Griffin, J.D.; Durgin, G.D. Gains For RF Tags Using Multiple Antennas. IEEE Trans. Antennas Propag. 2008, 56, 563–570. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tag-ID | Resonant Frequency/Polarization | |
|---|---|---|
| Tag-a | 8.90 | 10.97 |
| Tag-b | 6.96 | 6.97 |
| Tag-c | 8.32 | 12.44 |
| Freq. Shift (%) | Font Name (Height = 15 mm) | Height (mm) | Spacing | ||||
|---|---|---|---|---|---|---|---|
| Arial Reg. | Time | Corbel | 16 | 16.4 | a b c | a b c | |
| (‘a’) | −4.15 | 4.49 | 9.32 | −6.85 | −8.53 | −0.89 | 0.78 |
| (‘b’) | 0.43 | −1.72 | −0.43 | −5.02 | −7.61 | 0.57 | 0.14 |
| (‘c’) | −6.12 | 6.00 | 10.45 | −7.21 | −9.49 | −1.20 | −1.80 |
| Font | Regular | F_1 | F_2 | F_3 | F_4 |
|---|---|---|---|---|---|
| Bold | F_1 | F_2 | F_3 | F_4 | |
| Size | Size_1 | Size_2 | Size_3 | Size_4 | |
| Spacing | abc | a bc | ab c | a b c | |
| Design Reference | Design Type | Inclusion of Tag Bottom Ground Plane | Font Type (Height in mm) | Frequency (GHz) | No. of Resonators Per Tag | Size (cm2) | Coding Spatial Density (bit/cm2) | Optically Controlled Resonators | Reconfigurable | Analysis of Structural (Font Types, Font Size, Orientation, Inter-Letter Spacing, etc.) Modifications |
|---|---|---|---|---|---|---|---|---|---|---|
| [25] | Mender line dipole structure with attached text | No | - | 0.896 | 1 | 2.5 × 13.5 | - | Yes | No | No |
| [14] | Single letter Latin Alphabet | No | Arial (24) | 1–10 | 1 | 3.7 × 3.7 | 0.34 | Yes | No | No |
| [27] | Single letter Latin Alphabet | No | Arial (48) | 1–10 | 1 | 4.8 × 4.5 | 0.21 | Yes | No | No |
| [2] | Single letter Arabic Alphabets | No | Arial (24) | 1–10 | 1 | 3.7 × 3.7 | 0.35 | Yes | No | No |
| [1] | Peyote symbols of five letters | No | Blocks building | 57–64 | 5 | 5 × 1 | 2.00 | Yes | Yes | No |
| [21] | Latin alphabets letters and words with opening slots | No | Calibri (53) | 1–10 | 3 | 5.3 × 9 | 0.06 | Yes | No | No |
| This work | Latin Alphabet letters and three-letter words | Yes | Arial, Corbel, Times New Roman (different sizes) | 6–13 | 3 | 4 × 2 | 2.63 ** | Yes | Yes | Yes |
| Tag-ID Letters | Digital Code | Signature Frequency/Polarization | ||
|---|---|---|---|---|
| fHH | fVV | fVH = fHV | ||
| Tag-aøø | 100 | 8.91 | 10.98 | 8.90, 10.97 |
| Tag-øbø | 010 | 7.00 | 6.99 | 7.00, 6.99 |
| Tag-øøc | 001 | 8.27 | 12.41 | 8.27, 12.41 |
| Tag-abø | 110 | 7.00 8.91 | 6.99 10.98 | 7.00, 8.91, 6.99, 10.98 |
| Tag-aøc | 101 | 8.27 8.97 | 10.98 12.41 | 8.27, 8.97, 10.98, 12.41 |
| Tag-øbc | 011 | 7.00 8.27 | 6.99 12.41 | 7.00, 8.27, 6.99, 12.41 |
| Tag-abc | 111 | 8.91 7.00 8.27 | 10.98 6.99 12.41 | 8.81, 7.00, 8.27 10.98, 6.99, 12.41 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rmili, H.; Oussama, B.; Yousaf, J.; Hakim, B.; Mittra, R.; Aguili, T.; Tedjini, S. Robust Detection for Chipless RFID Tags Based on Compact Printable Alphabets. Sensors 2019, 19, 4785. https://doi.org/10.3390/s19214785
Rmili H, Oussama B, Yousaf J, Hakim B, Mittra R, Aguili T, Tedjini S. Robust Detection for Chipless RFID Tags Based on Compact Printable Alphabets. Sensors. 2019; 19(21):4785. https://doi.org/10.3390/s19214785
Chicago/Turabian StyleRmili, Hatem, Boularess Oussama, Jawad Yousaf, Bandar Hakim, Raj Mittra, Taoufik Aguili, and Smail Tedjini. 2019. "Robust Detection for Chipless RFID Tags Based on Compact Printable Alphabets" Sensors 19, no. 21: 4785. https://doi.org/10.3390/s19214785
APA StyleRmili, H., Oussama, B., Yousaf, J., Hakim, B., Mittra, R., Aguili, T., & Tedjini, S. (2019). Robust Detection for Chipless RFID Tags Based on Compact Printable Alphabets. Sensors, 19(21), 4785. https://doi.org/10.3390/s19214785