A Subset-Reduced Method for FDE ARAIM of Tightly-Coupled GNSS/INS


Abstract
:1. Introduction
2. Number of Subsets of the Current ARAIM
3. Number of Subsets of the Proposed ARAIM
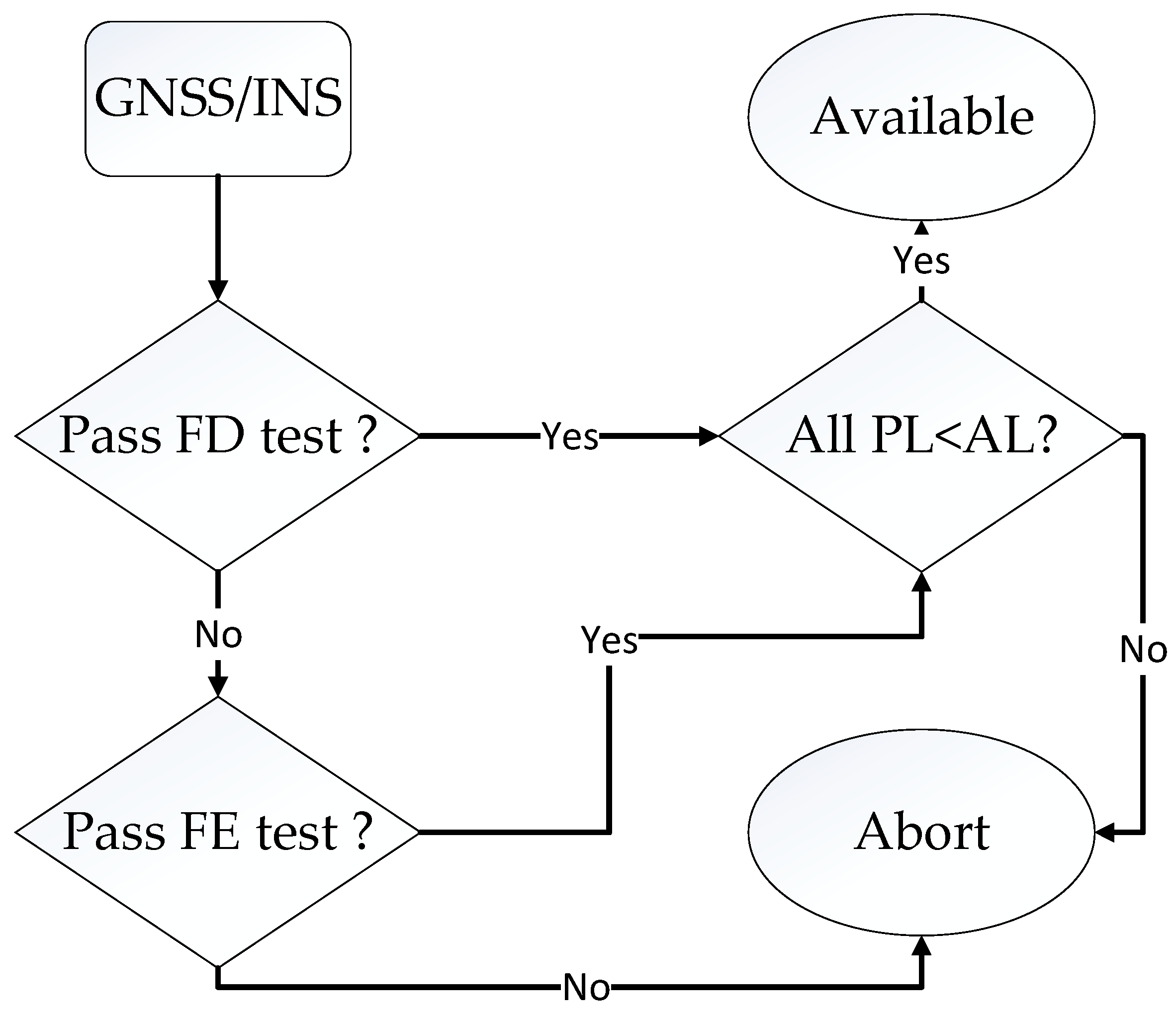
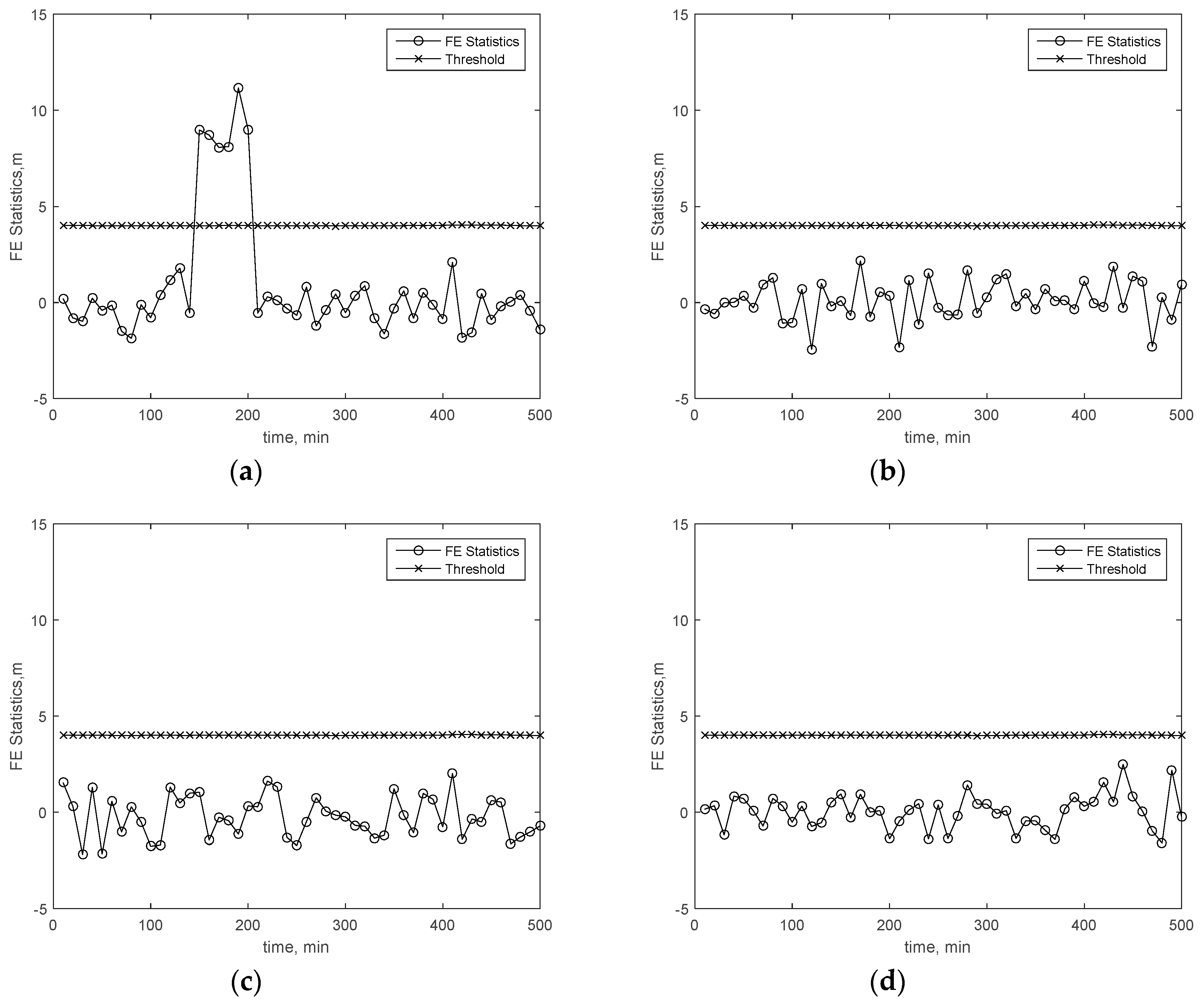
4. Fault Detection of Subset-Reduced GNSS/INS ARAIM
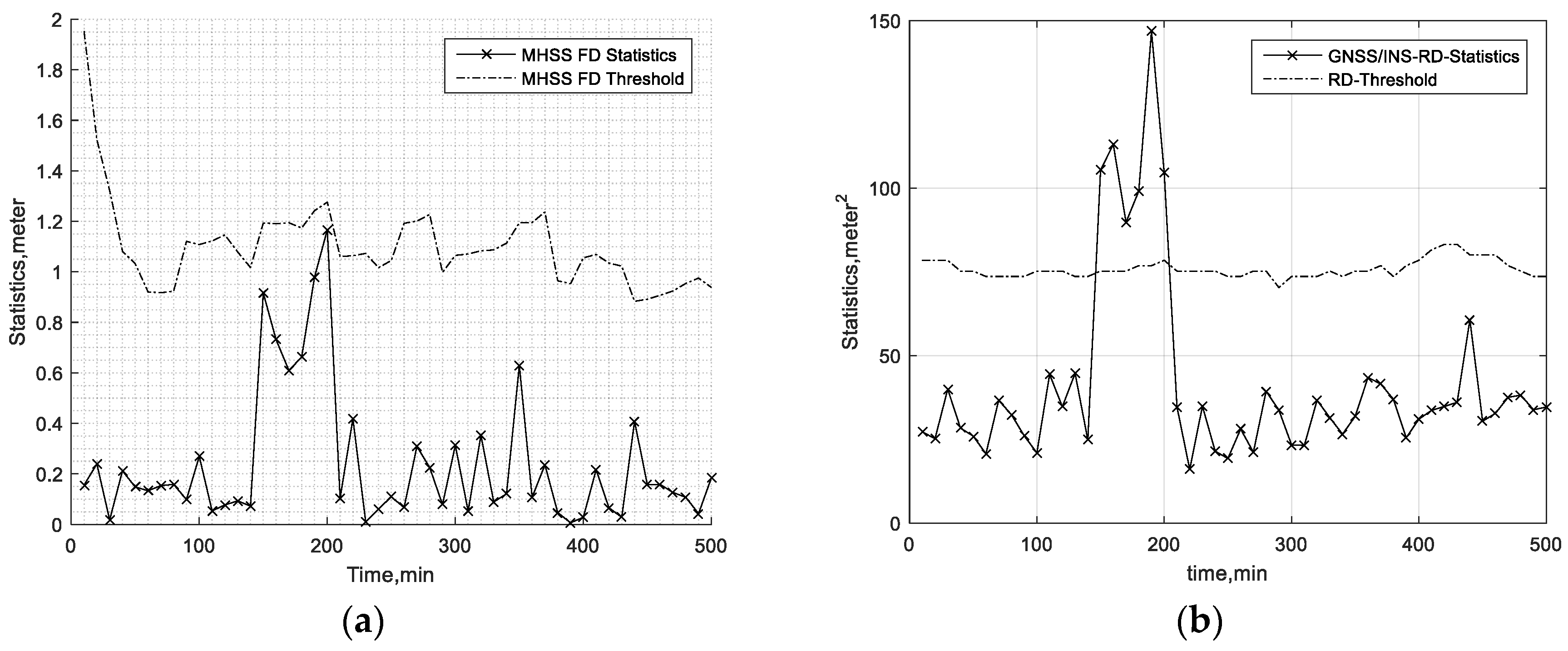
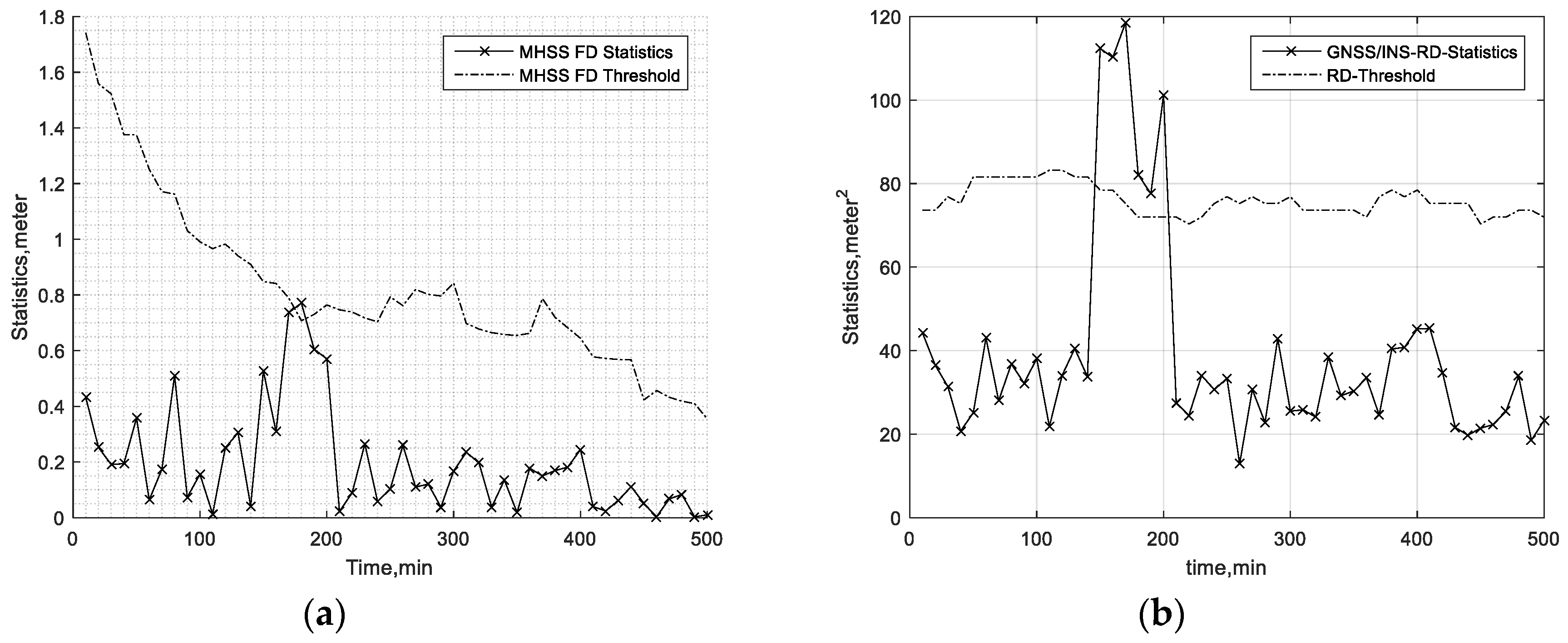
4.1. MHSS Fault Detection Test
4.2. Residual-Based Fault Detection Test
4.3. Integrity Monitoring without Fault Being Detected
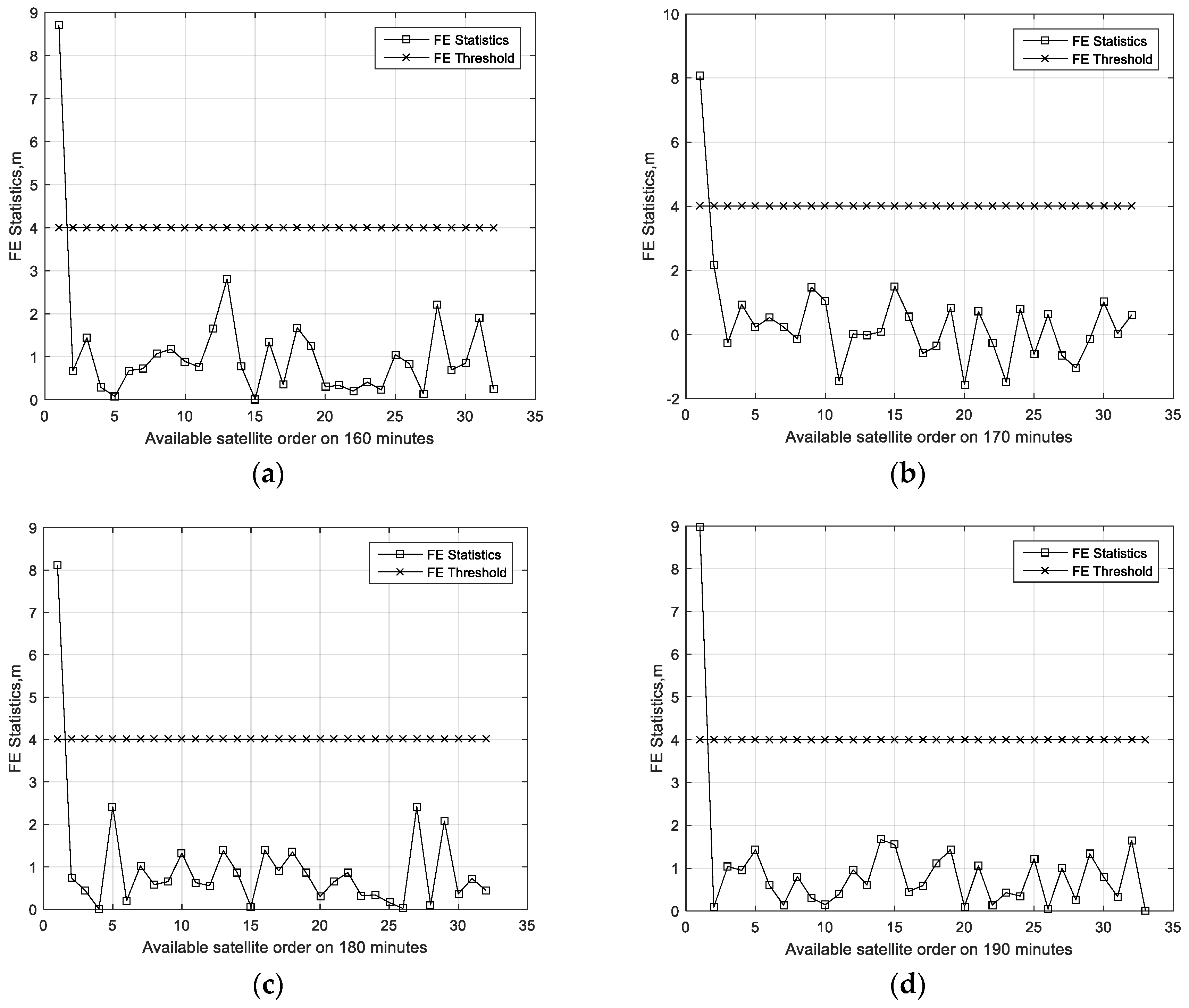
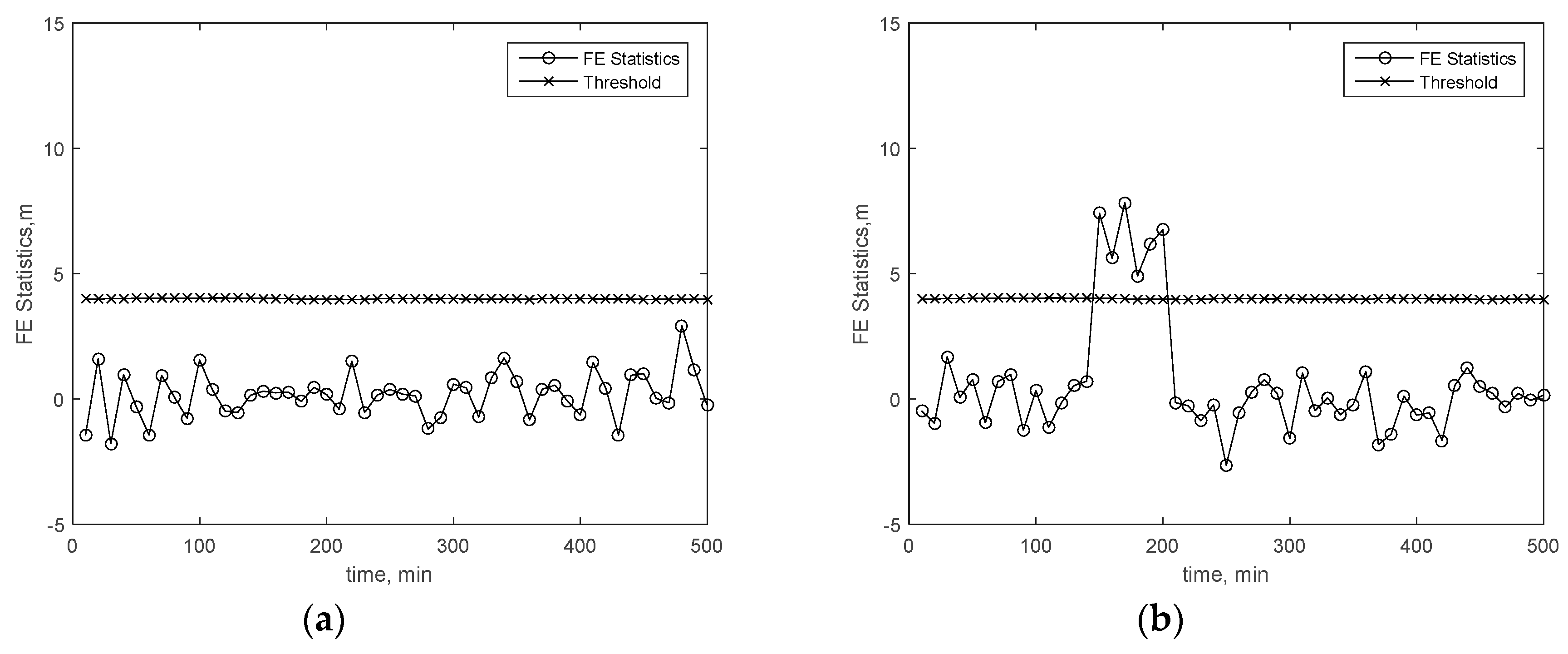
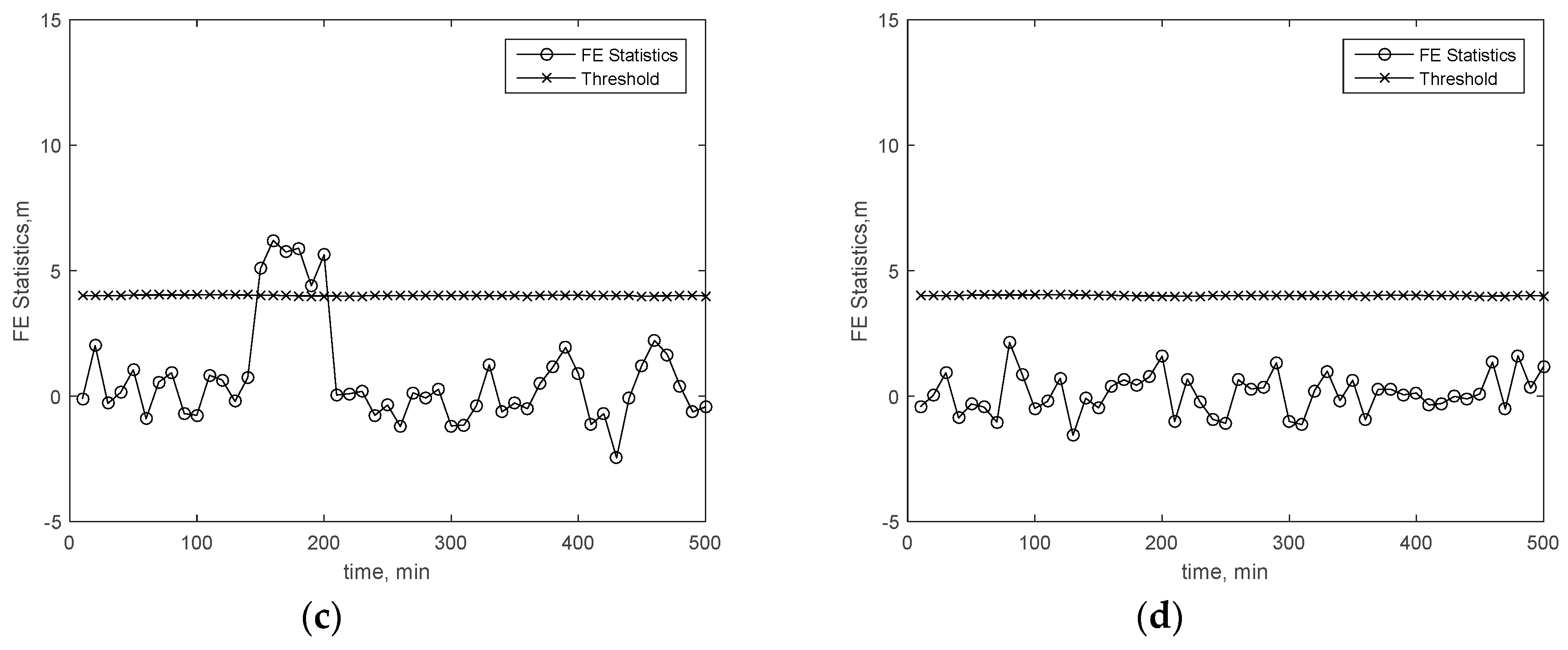
5. Fault Exclusion of Subset-Reduced ARAIM
5.1. Fault Exclusion Test
5.2. Protection Level Computing after Fault Exclusion
6. Performance Estimation
- The probability requirement of hazardously misleading information (HMI), ;
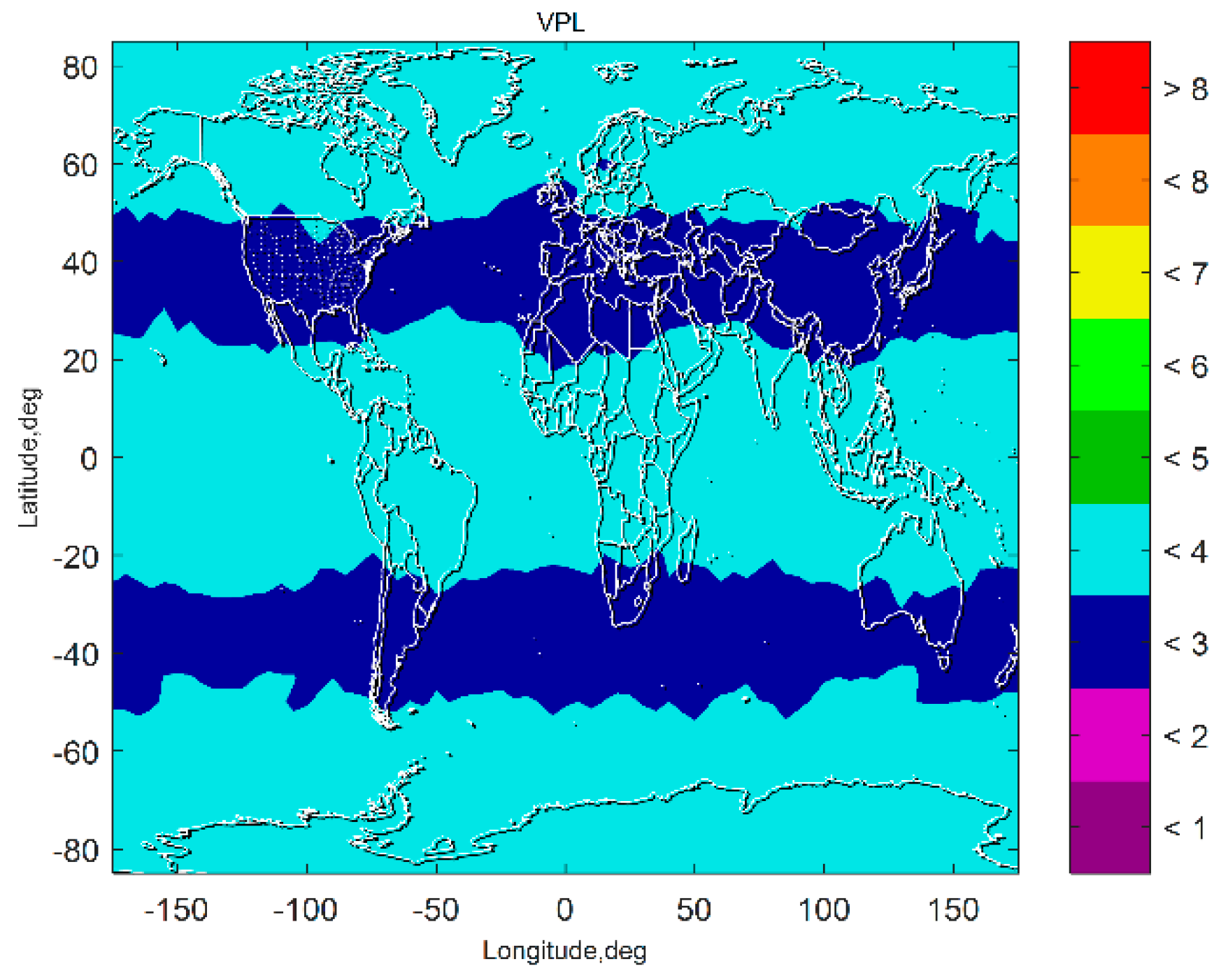
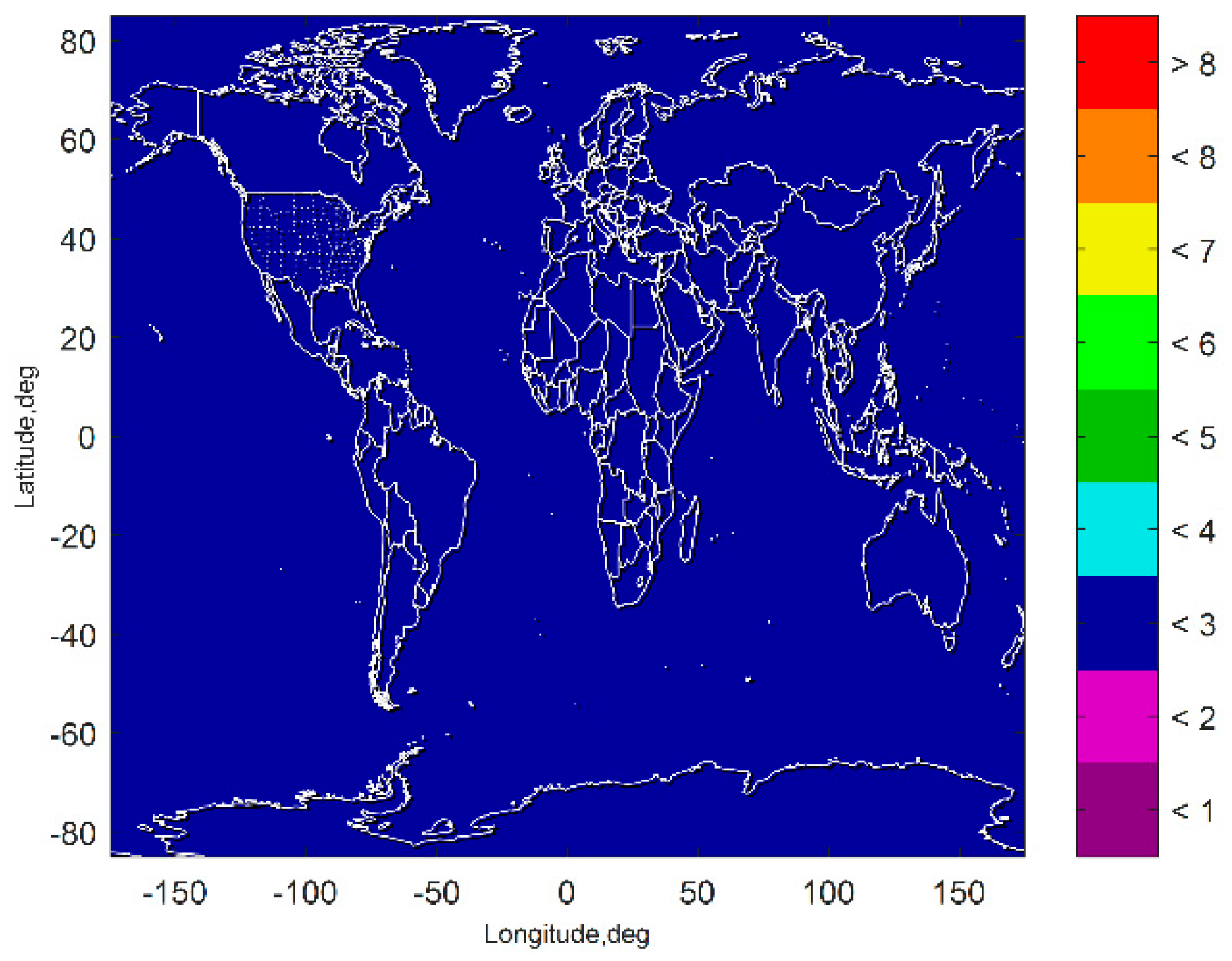
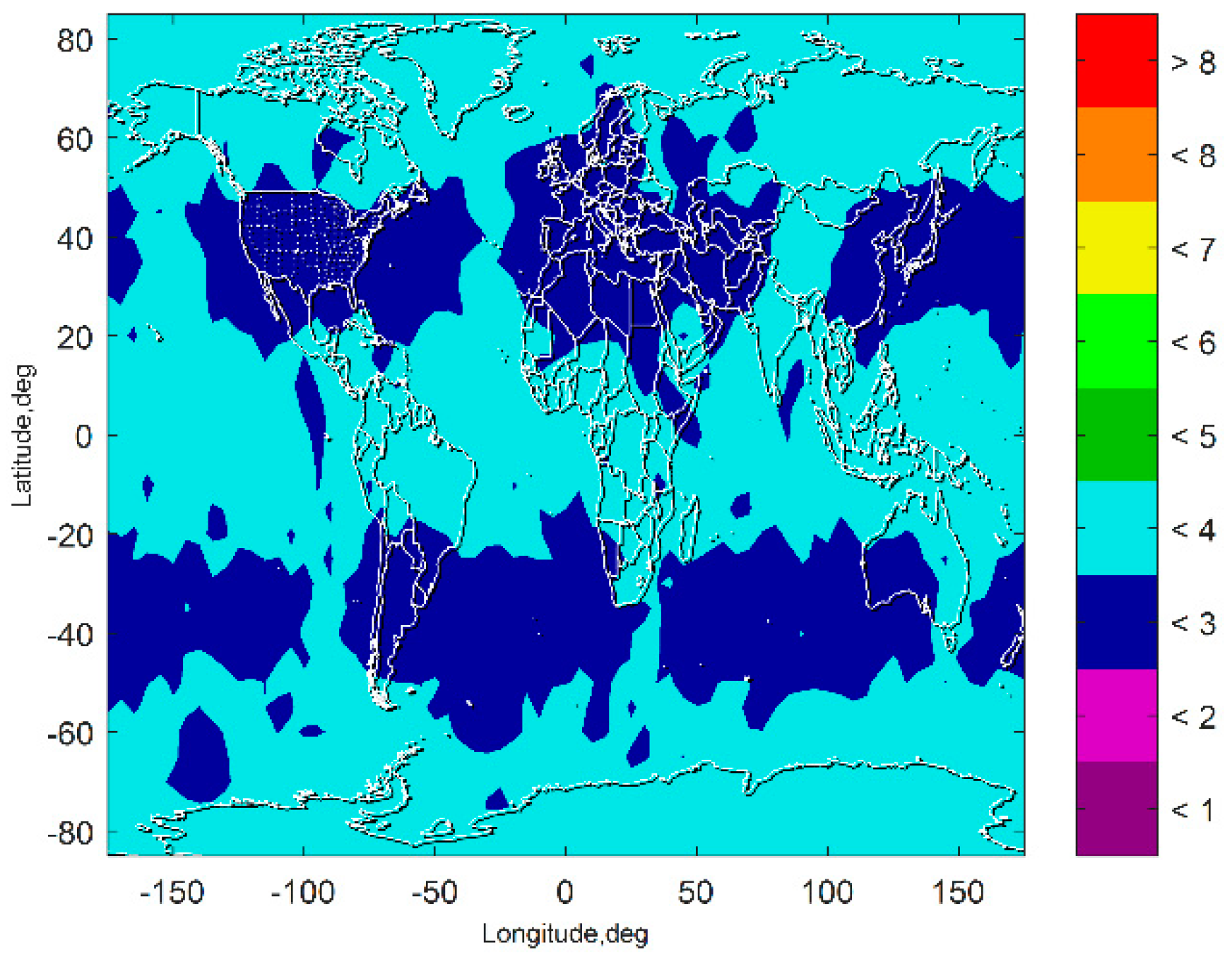
- The vertical protection level (VPL) and horizontal protection level (HPL) must be less than and respectively;
- The threshold of continuity risk,
- The 95% vertical accuracy and horizontal accuracy should be lower than and 16 m, respectively;
- The availability requirement is 0.99-0.99999.
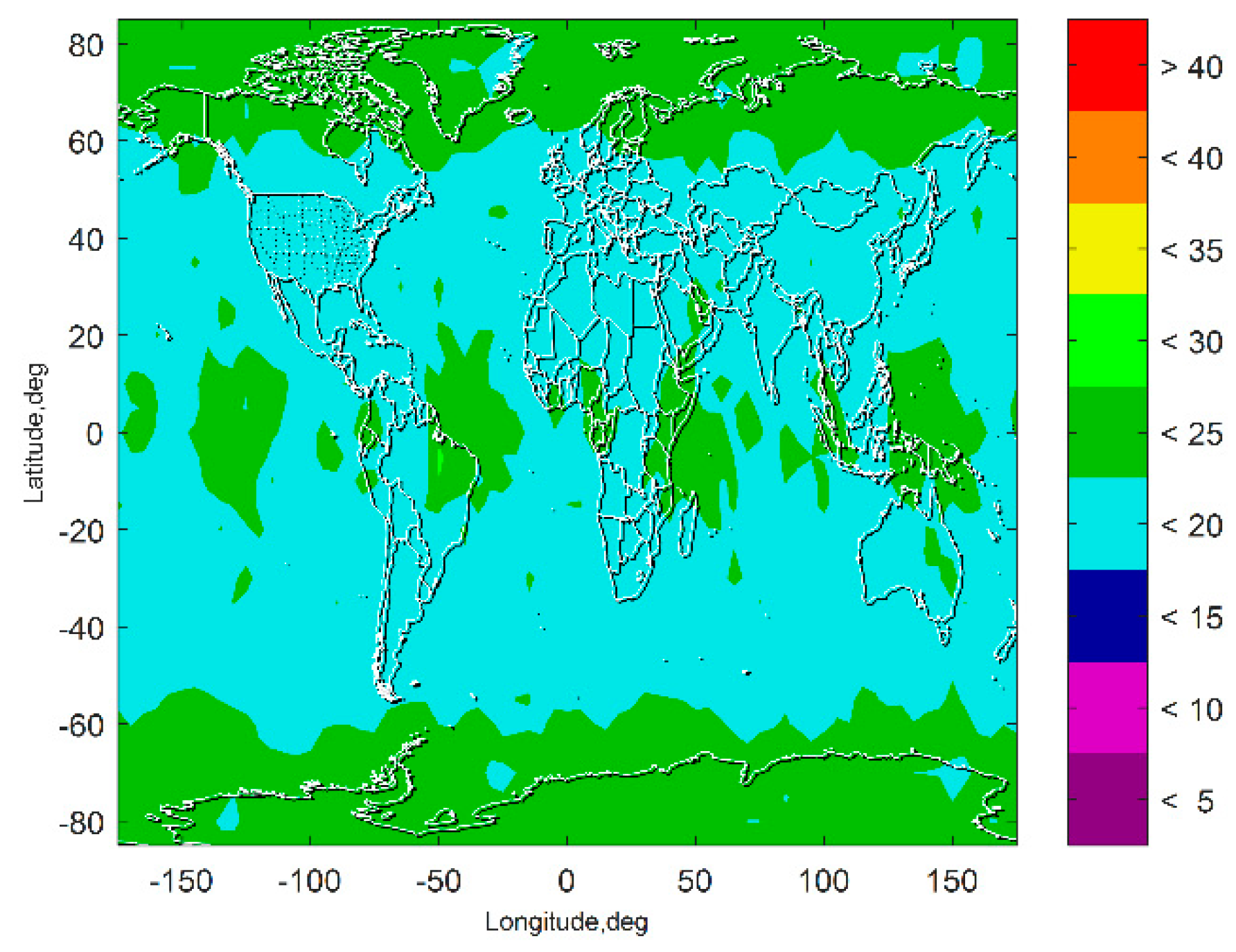
6.1. EMT-I Computing
6.2. Integrity Performance
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- ICAO. Annex 10, Aeronautical Telecommunications, Volume I (Radio Navigation Aids), 7th ed.; ICAO, Ed.; ICAO: Montreal, QC, Canada, 2018; Volume 1. [Google Scholar]
- Braff, R.; Shively, C.; Zeltser, M. Radionavigation system integrity and reliability. Proc. IEEE 1983, 71, 1214–1223. [Google Scholar] [CrossRef]
- Brown, R.G. A baseline GPS RAIM scheme and a note on the equivalence of three RAIM methods. Navigation 1992, 39, 301–316. [Google Scholar] [CrossRef]
- Grosch, A.; Crespillo, O.G.; Martini, I.; Gunther, C. Snapshot Residual and Kalman Filter based Fault Detection and Exclusion Schemes for Robust Railway Navigation. In Proceedings of the 2017 European Navigation Conference (ENC 2017), Lausanne, Switzerland, 9–12 May 2017; pp. 36–47. [Google Scholar] [CrossRef]
- Zhu, N.; Betaille, D.; Marais, J.; Berbineau, M. GNSS Integrity Enhancement for Urban Transport Applications by Error Characterization and Fault Detection and Exclusion (FDE). In Proceedings of the Géolocalisation et Navigation dans l’Espace et le Temps, Journées Scientifiques 2018 de l’URSI, Paris, France, 28–29 March 2018. [Google Scholar]
- Zhu, N.; Marais, J.; Betaille, D.; Berbineau, M. GNSS Position Integrity in Urban Environments: A Review of Literature. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2762–2778. [Google Scholar] [CrossRef] [Green Version]
- Joerger, M.; Chan, F.-C.; Pervan, B. Solution Separation Versus Residual-Based RAIM. Navigation 2014, 61, 273–291. [Google Scholar] [CrossRef]
- Blanch, J.; Walter, T.; Enge, P.; Lee, Y.; Pervan, B.; Rippl, M.; Spletter, A. Advanced RAIM User Algorithm Description: Integrity Support Message Processing, Fault Detection, Exclusion, and Protection Level Calculation. In Proceedings of the 25th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 2828–2849. [Google Scholar]
- WGC. EU-U.S. Cooperation on Satellite Navigation Working Group C-ARAIM Technical Subgroup Milestone 2 Report. Available online: https://www.gps.gov/policy/cooperation/europe/2015/working-group-c/ARAIM-milestone-2-report.pdf (accessed on 6 November 2019).
- WGC. EU-U.S. Cooperation on Satellite Navigation Working Group. C- ARAIM Technical Subgroup Milestone 3 Report. Available online: https://www.gps.gov/policy/cooperation/europe/2016/working-group-c/ARAIM-milestone-3-report.pdf (accessed on 6 November 2019).
- FAA. Phase II of the GNSS Evolutionary Architecture Study; FAA: Washington, DC, USA, 2010. [Google Scholar]
- Yeh, S.-J.; Jan, S.-S. Operational Receiver Autonomous Integrity Monitoring Prediction System for Air Traffic Management System. J. Aircr. 2017, 54, 346–353. [Google Scholar] [CrossRef]
- Yun, H.; Kee, C. Multiple-hypothesis RAIM algorithm with an RRAIM concept. Aircr. Eng. Aerosp. Technol. 2013, 86, 26–32. [Google Scholar] [CrossRef]
- Blanch, J.; Walter, T.; Enge, P. RAIM with optimal integrity and continuity allocations under multiple failures. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1235–1247. [Google Scholar] [CrossRef]
- Ge, Y.; Wang, Z.; Zhu, Y. Reduced ARAIM monitoring subset method based on satellites in different orbital planes. GPS Solut. 2017, 21, 1443–1456. [Google Scholar] [CrossRef]
- Blanch, J.; Walter, T.; Enge, P. Fixed Subset Selection to Reduce Advanced RAIM Complexity. In Proceedings of the 2018 International Technical Meeting of The Institute of Navigation, Reston, VA, USA, 1–29 January 2018; pp. 88–98. [Google Scholar]
- Meng, Q.; Liu, J.; Zeng, Q.; Feng, S.; Xu, R. Improved ARAIM fault modes determination scheme based on feedback structure with probability accumulation. GPS Solut. 2018, 23. [Google Scholar] [CrossRef]
- Blanch, J.; Walter, T.; Enge, P. Exclusion for advanced RAIM: Requirements and a baseline algorithm. In Proceedings of the 2014 International Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 27–29 January 2014; pp. 99–107. [Google Scholar]
- Joerger, M.; Pervan, B. Kalman Filter-Based Integrity Monitoring Against Sensor Faults. J. Guid. Control. Dyn. 2013, 36, 349–361. [Google Scholar] [CrossRef] [Green Version]
- Blanch, J.; Walter, T.; Enge, P. Protection Levels after Fault Exclusion for Advanced RAIM. Navigation 2017, 64, 505–513. [Google Scholar] [CrossRef]
- Blanch, J.; Walter, T.; Enge, P. A Simple Satellite Exclusion Algorithm for Advanced RAIM. In Proceedings of the 2016 International Technical Meeting of The Institute of Navigation, Monterey, CA, USA, 25–28 January 2016; pp. 239–244. [Google Scholar]
- Urteaga, I.; Bugallo, M.F.; Djurić, P.M. Sequential Monte Carlo methods under model uncertainty. In Proceedings of the 2016 IEEE Statistical Signal Processing Workshop (SSP), Palma de Mallorca, Spain, 26–29 June 2016; pp. 1–5. [Google Scholar]
- Chopin, N.; Jacob, P.E.; Papaspiliopoulos, O. SMC-super-2: An efficient algorithm for sequential analysis of state space models. J. R. Stat. Soc. 2013, 75, 397–426. [Google Scholar] [CrossRef]
- Martino, L.; Elvira, V.; Camps-Valls, G. Distributed Particle Metropolis-Hastings schemes. In Proceedings of the 2018 IEEE Statistical Signal Processing Workshop (SSP), Freiburg, Germany, 10–13 June 2018; pp. 553–557. [Google Scholar]
- Martino, L.; Read, J.; Elvira, V.; Louzada, F. Cooperative parallel particle filters for online model selection and applications to urban mobility. Digit. Signal. Process. 2017, 60, 172–185. [Google Scholar] [CrossRef] [Green Version]
- Orejas, M.; Kana, Z.; Dunik, J.; Dvorska, J.; Kundak, N. Multiconstellation GNSS/INS to support LPV200 approaches and autolanding. In Proceedings of the International Technical Meeting of the Satellite Division of The Institute of Navigation, Nashville, TN, USA, 17–21 September 2012; pp. 790–803. [Google Scholar]
- Tran, H.T.; Lo Presti, L. Kalman filter-based ARAIM algorithm for integrity monitoring in urban environment. ICT Express 2019, 5, 65–71. [Google Scholar] [CrossRef]
- Walter, T.; Blanch, J.; Enge, P. Reduced subset analysis for multi-constellation ARAIM. In Proceedings of the 2014 International Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 27–29 January 2014; pp. 89–98. [Google Scholar]
- Blanch, J.; Walker, T.; Enge, P.; Lee, Y.; Pervan, B.; Rippl, M.; Spletter, A.; Kropp, V. Baseline advanced RAIM user algorithm and possible improvements. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 713–732. [Google Scholar] [CrossRef]
- Blanch, J.; Walter, T.; Enge, P. A formula for solution separation without subset solutions for advanced RAIM. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 316–326. [Google Scholar]
- Groves, P.D. Navigation using inertial sensors. IEEE Aerosp. Electron. Syst. Mag. 2015, 30, 42–69. [Google Scholar] [CrossRef]
- Liu, Y.; Li, S.; Fu, Q.; Liu, Z. Impact Assessment of GNSS Spoofing Attacks on INS/GNSS Integrated Navigation System. Sensors 2018, 18, 1433. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, J. A-RAIM and R-RAIM Performance using the Classic and MHSS Methods. J. Navig. 2013, 67, 49–61. [Google Scholar] [CrossRef]
- Tanil, C. Detecting GNSS Spoofing Attacks Using INS Coupling; Illinois Institute of Technology: Chicago, IL, USA, 2016. [Google Scholar]
- Tanil, C.; Khanafseh, S.; Joerger, M.; Pervan, B. An INS Monitor to Detect GNSS Spoofers Capable of Tracking Vehicle Position. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 131–143. [Google Scholar] [CrossRef]
- Wang, J.; Ober, P.B. On the Availability of Fault Detection and Exclusion in GNSS Receiver Autonomous Integrity Monitoring. J. Navig. 2009, 62, 251–261. [Google Scholar] [CrossRef] [Green Version]
- Bernath, G.N. A Baseline Fault Detection and Exclusion Algorithm for the Global Positioning System; Ohio University: Athens, OH, USA, 1994. [Google Scholar]
- ICAO. Global Navigation Satellite System (GNSS) Manual; ICAO: Montreal, QC, Canada, 2005. [Google Scholar]
- Wang, Z.; Shao, W.; Li, R.; Song, D.; Li, T. Characteristics of BDS Signal-in-Space User Ranging Errors and Their Effect on Advanced Receiver Autonomous Integrity Monitoring Performance. Sensors 2018, 18, 4475. [Google Scholar] [CrossRef] [PubMed]
- Walter, T.; Gunning, K.; Eric Phelts, R.; Blanch, J. Validation of the unfaulted error bounds for ARAIM. Navig. J. Inst. Navig. 2018, 65, 117–133. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Satellites | 20 | 30 | 40 |
| Number of Subsets | 210 | 465 | 820 |
| Constellations | 2 | 3 | 4 | ||||
| Constellations | Constellations | Constellations | |||||
| Satellites | 16 | 24 | 24 | 32 | 32 | 48 | |
| Satellites | Satellites | Satellites | Satellites | Satellites | Satellites | ||
| Subsets | Current ARAIM | 152 | 326 | 351 | 595 | 628 | 1324 |
| Algorithms | Subset-Reduced ARAIM | 4 | 4 | 7 | 7 | 11 | 11 |
| Parameter | Value | Unit |
|---|---|---|
| Gyro angle random walk | ||
| Gyro bias error | ||
| Gyro time constant | s | |
| Accelerometer white noise | ||
| Accelerometer bias error | ||
| Accelerometer bias time constant | s | |
| Probability of satellite fault | ||
| Probability of constellation fault | ||
| Hazardous monitoring information (HMI) probability | ||
| Probability of false alert | ||
| Probability of EMT-I |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, W.; Zhan, X.; Zhang, X.; Wang, S. A Subset-Reduced Method for FDE ARAIM of Tightly-Coupled GNSS/INS. Sensors 2019, 19, 4847. https://doi.org/10.3390/s19224847
Pan W, Zhan X, Zhang X, Wang S. A Subset-Reduced Method for FDE ARAIM of Tightly-Coupled GNSS/INS. Sensors. 2019; 19(22):4847. https://doi.org/10.3390/s19224847
Chicago/Turabian StylePan, Weichuan, Xingqun Zhan, Xin Zhang, and Shizhuang Wang. 2019. "A Subset-Reduced Method for FDE ARAIM of Tightly-Coupled GNSS/INS" Sensors 19, no. 22: 4847. https://doi.org/10.3390/s19224847
APA StylePan, W., Zhan, X., Zhang, X., & Wang, S. (2019). A Subset-Reduced Method for FDE ARAIM of Tightly-Coupled GNSS/INS. Sensors, 19(22), 4847. https://doi.org/10.3390/s19224847