Author Contributions
Conceptualization, T.Ř.; Data curation, T.P., V.L. and P.S.; Formal analysis, Š.L.; Funding acquisition, T.Ř.; Methodology, T.Ř.; Supervision, T.Ř.; Validation, L.H.; Visualization, T.P. and L.H.; Writing–original draft, T.Ř., T.P. and L.H.; Writing–review & editing, T.Ř., Š.L., V.L. and P.S.
Figure 1.
Geographical location of the Rostěnice Farm.
Figure 1.
Geographical location of the Rostěnice Farm.
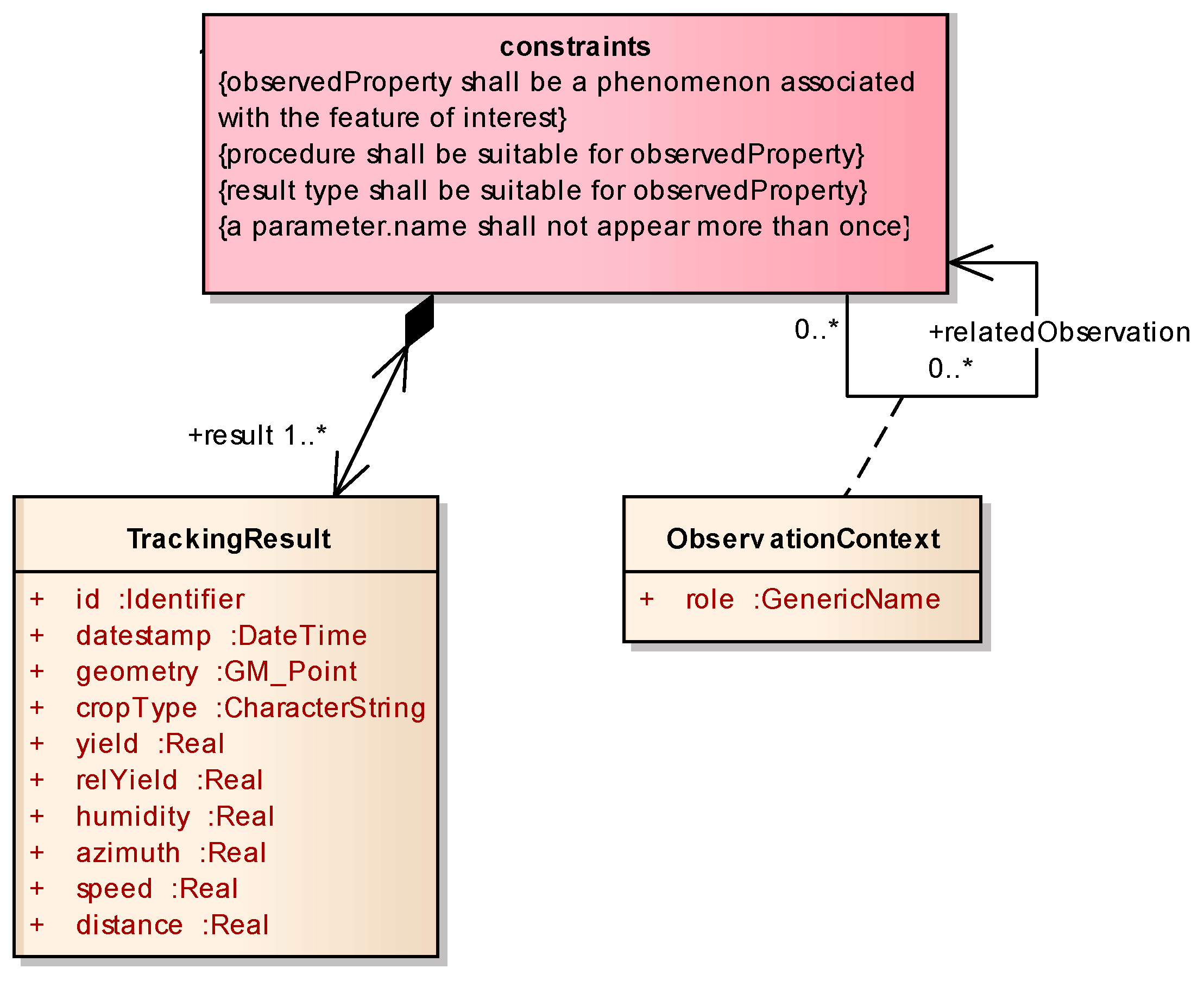
Figure 2.
The UML (Unified Modelling Language) class diagram of the data model used for measurements. The data model represents a conceptual specialization of ISO 19156 (not depicted fully due to its complexity; focusing only on the specialised class “TrackingResult”).
Figure 2.
The UML (Unified Modelling Language) class diagram of the data model used for measurements. The data model represents a conceptual specialization of ISO 19156 (not depicted fully due to its complexity; focusing only on the specialised class “TrackingResult”).
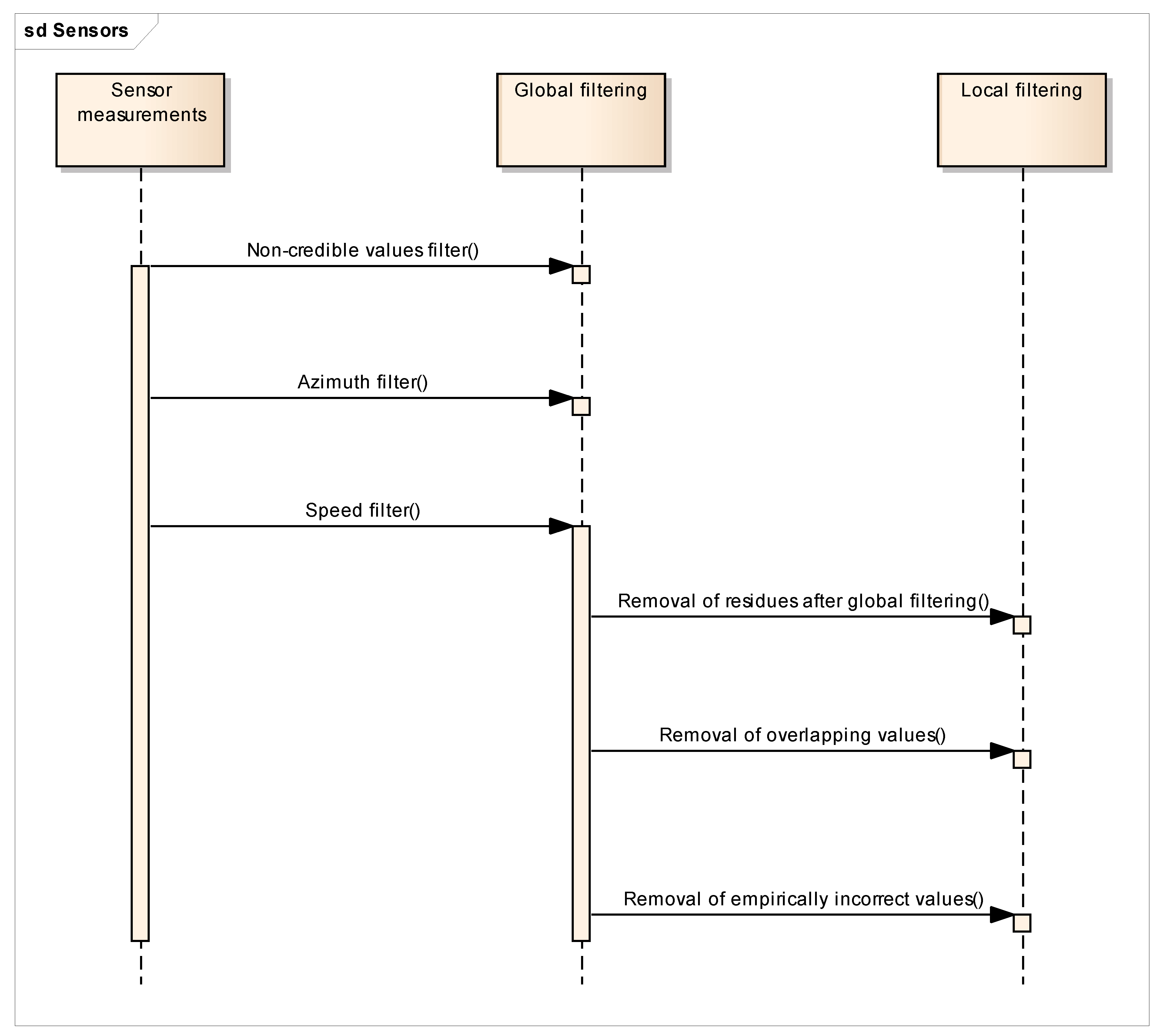
Figure 3.
The overview UML sequential diagram of global and local filtration methods.
Figure 3.
The overview UML sequential diagram of global and local filtration methods.
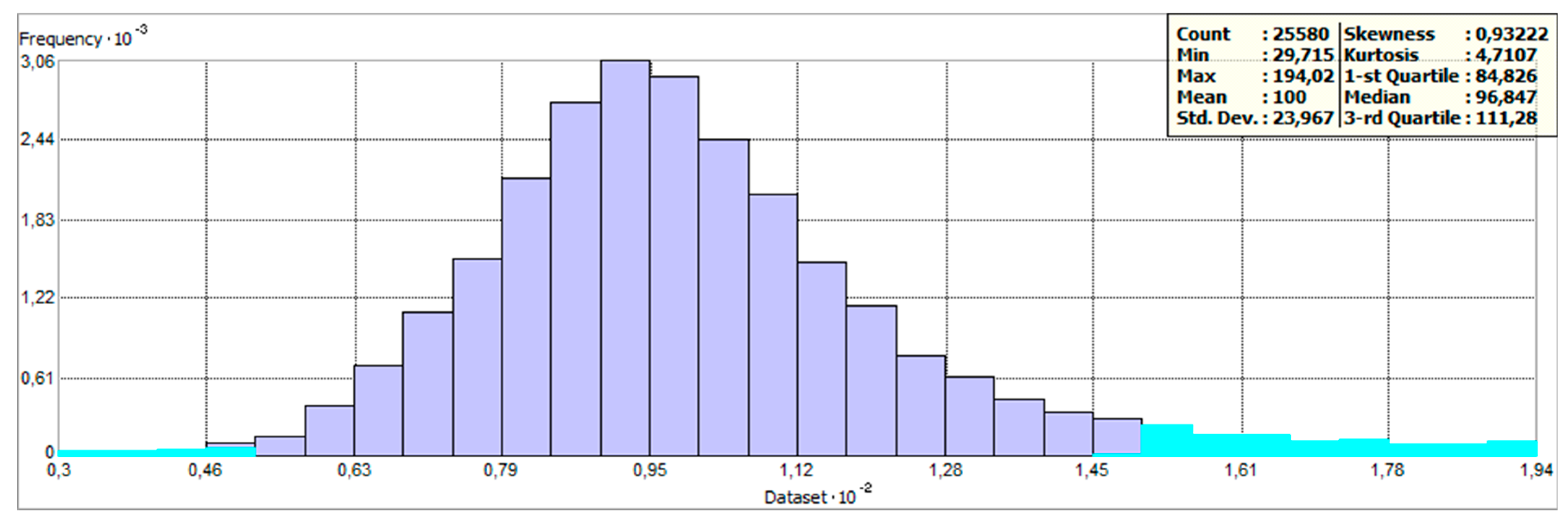
Figure 4.
Distribution of measured yield values at Přední prostřední field in 2017 (excluded values highlighted by light blue color).
Figure 4.
Distribution of measured yield values at Přední prostřední field in 2017 (excluded values highlighted by light blue color).
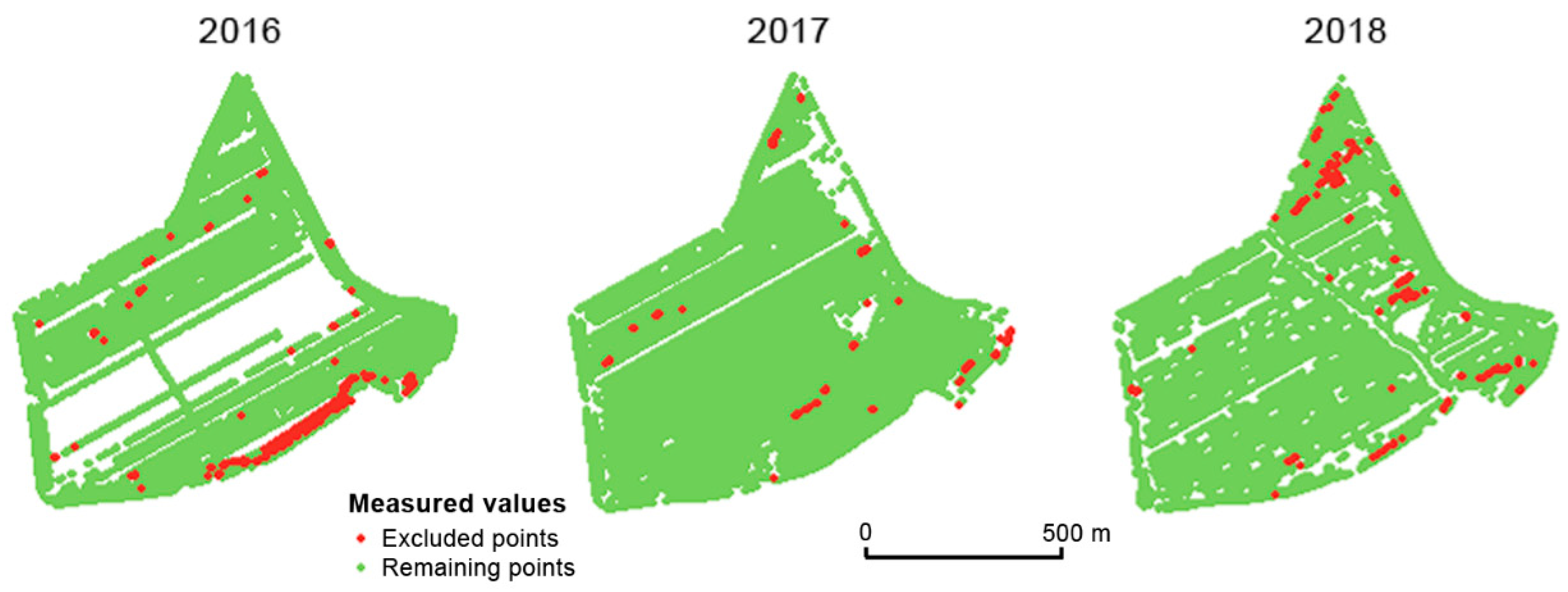
Figure 5.
Excluded points with non-credible values of very high and very low relative yield in the field Přední prostřední. The identical global filter was used.
Figure 5.
Excluded points with non-credible values of very high and very low relative yield in the field Přední prostřední. The identical global filter was used.
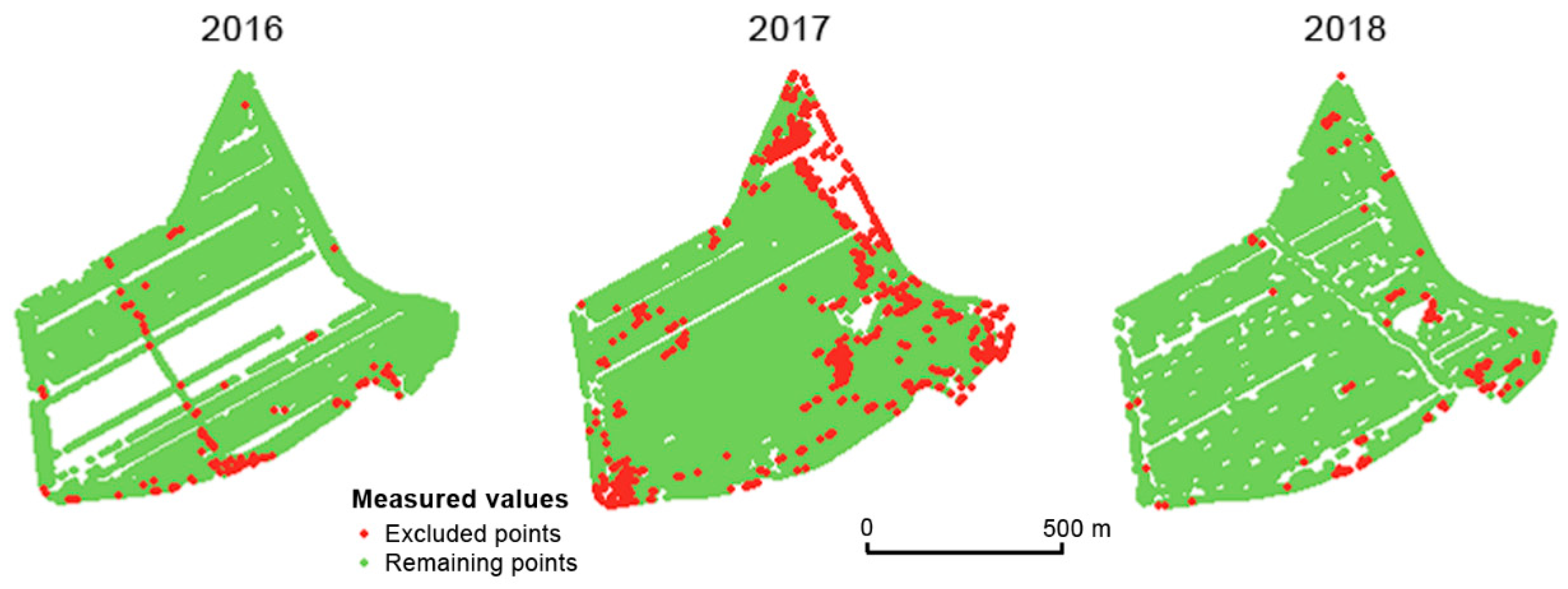
Figure 6.
Points excluded by the dominant direction global filter in the Přední prostřední field.
Figure 6.
Points excluded by the dominant direction global filter in the Přední prostřední field.
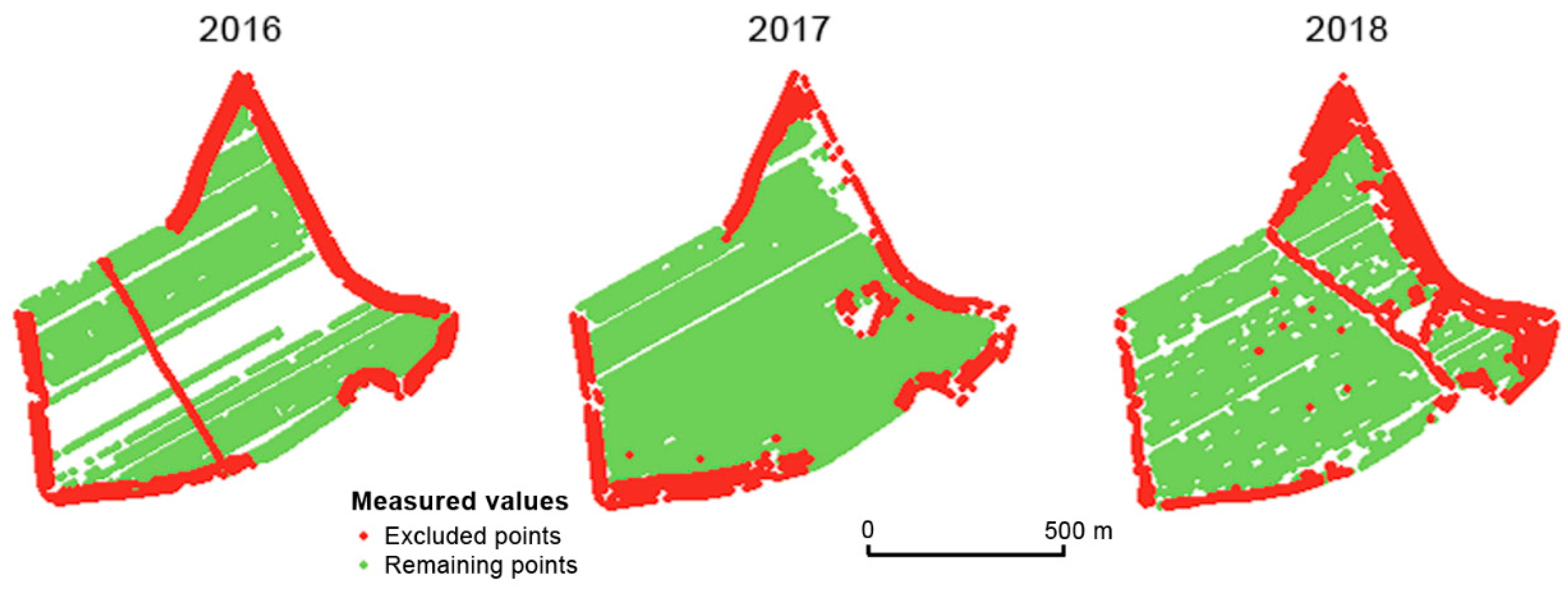
Figure 7.
Points excluded by the global speed limitation filter in the Přední prostřední field.
Figure 7.
Points excluded by the global speed limitation filter in the Přední prostřední field.
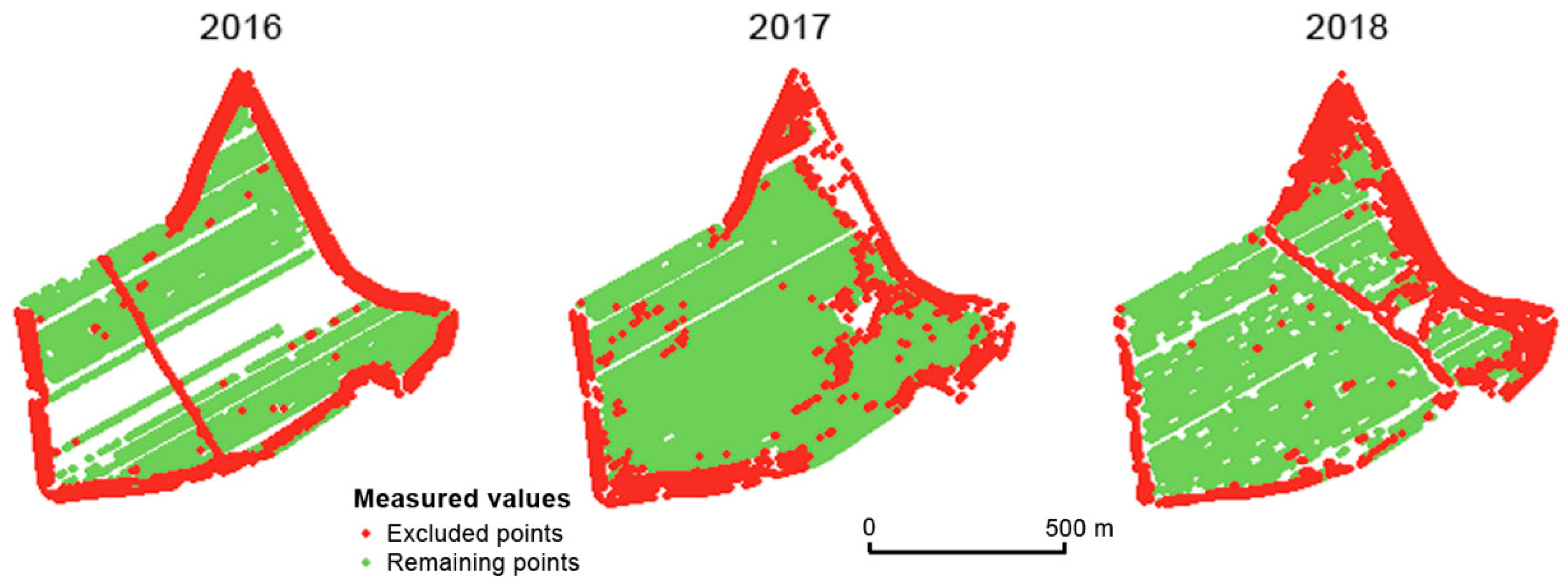
Figure 8.
Points excluded after applying all three global filters (extremely low/high relative yield, dominant direction, and speed limitation) in the Přední prostřední field.
Figure 8.
Points excluded after applying all three global filters (extremely low/high relative yield, dominant direction, and speed limitation) in the Přední prostřední field.
Figure 9.
Examples of overlapping (
a) and partially overlapping (
b) trajectories. The single-oriented trajectory was the first, while all the remaining trajectories depict the subsequent movements of the field harvester. Measured data were divided into classes according to the Jenks Natural Breaks method [
25].
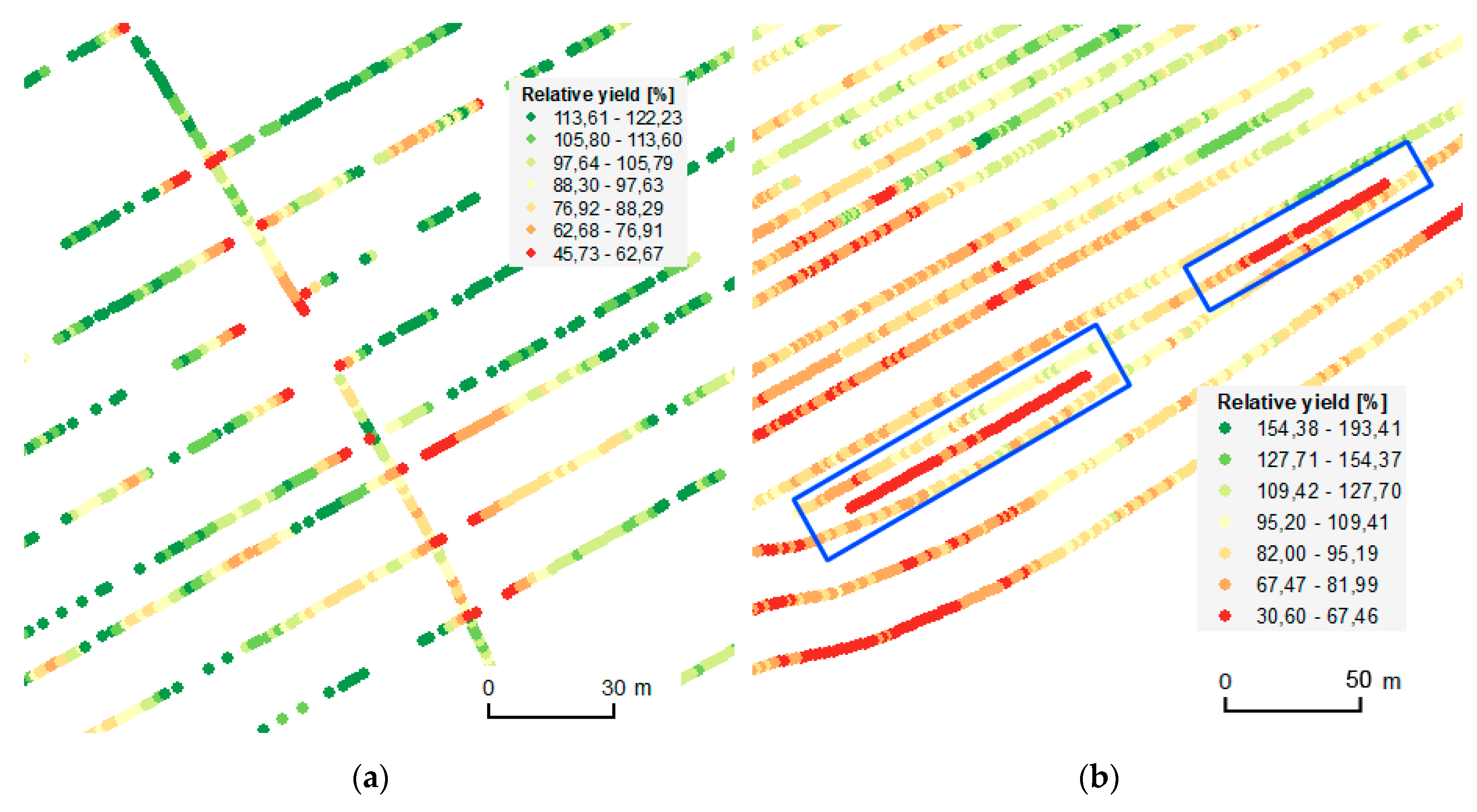
Figure 9.
Examples of overlapping (
a) and partially overlapping (
b) trajectories. The single-oriented trajectory was the first, while all the remaining trajectories depict the subsequent movements of the field harvester. Measured data were divided into classes according to the Jenks Natural Breaks method [
25].
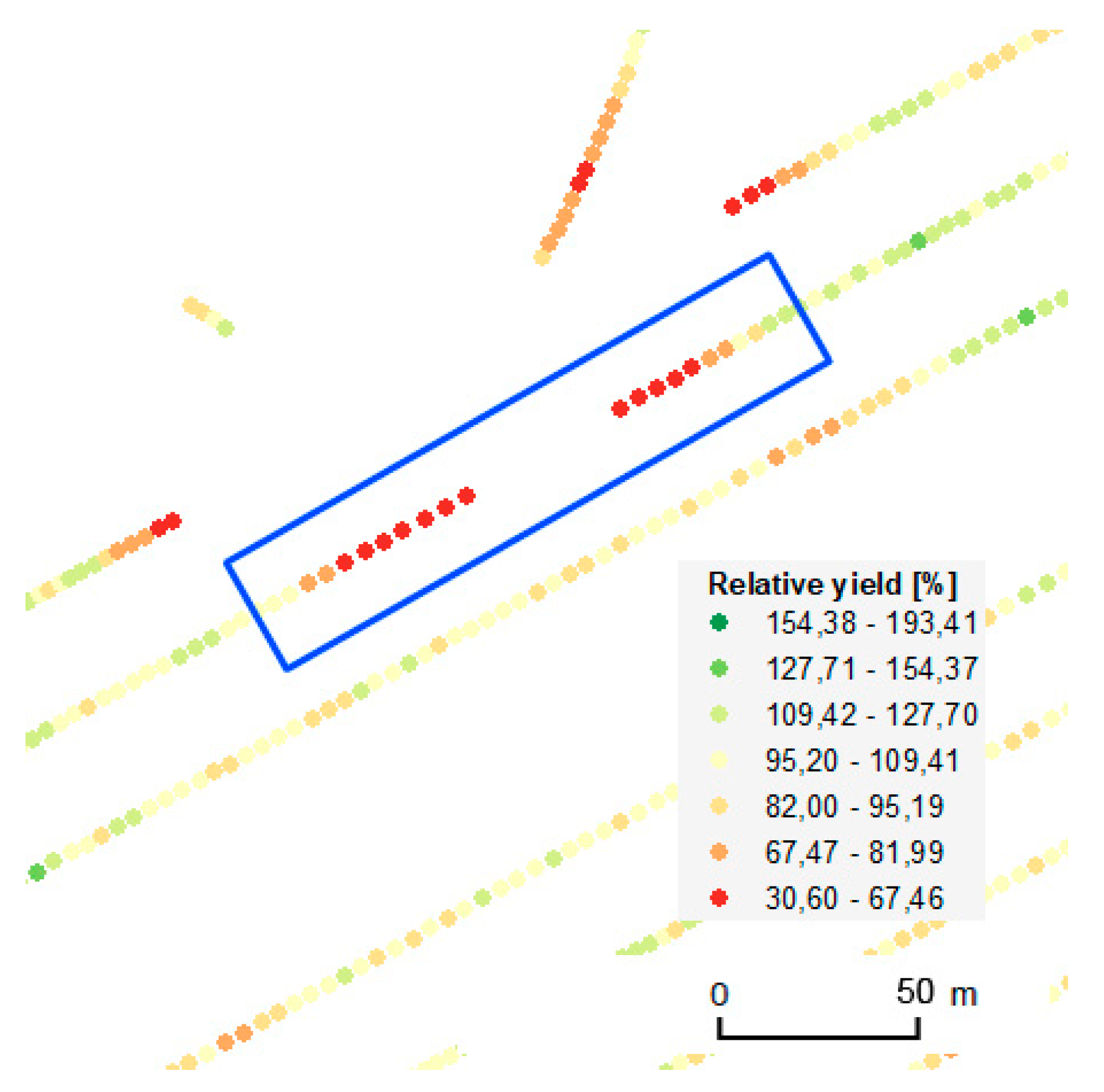
Figure 10.
Example of gaps in measurements within a row.
Figure 10.
Example of gaps in measurements within a row.
Figure 11.
Spatial distribution of measurements filtered by means of global and local filters.
Figure 11.
Spatial distribution of measurements filtered by means of global and local filters.
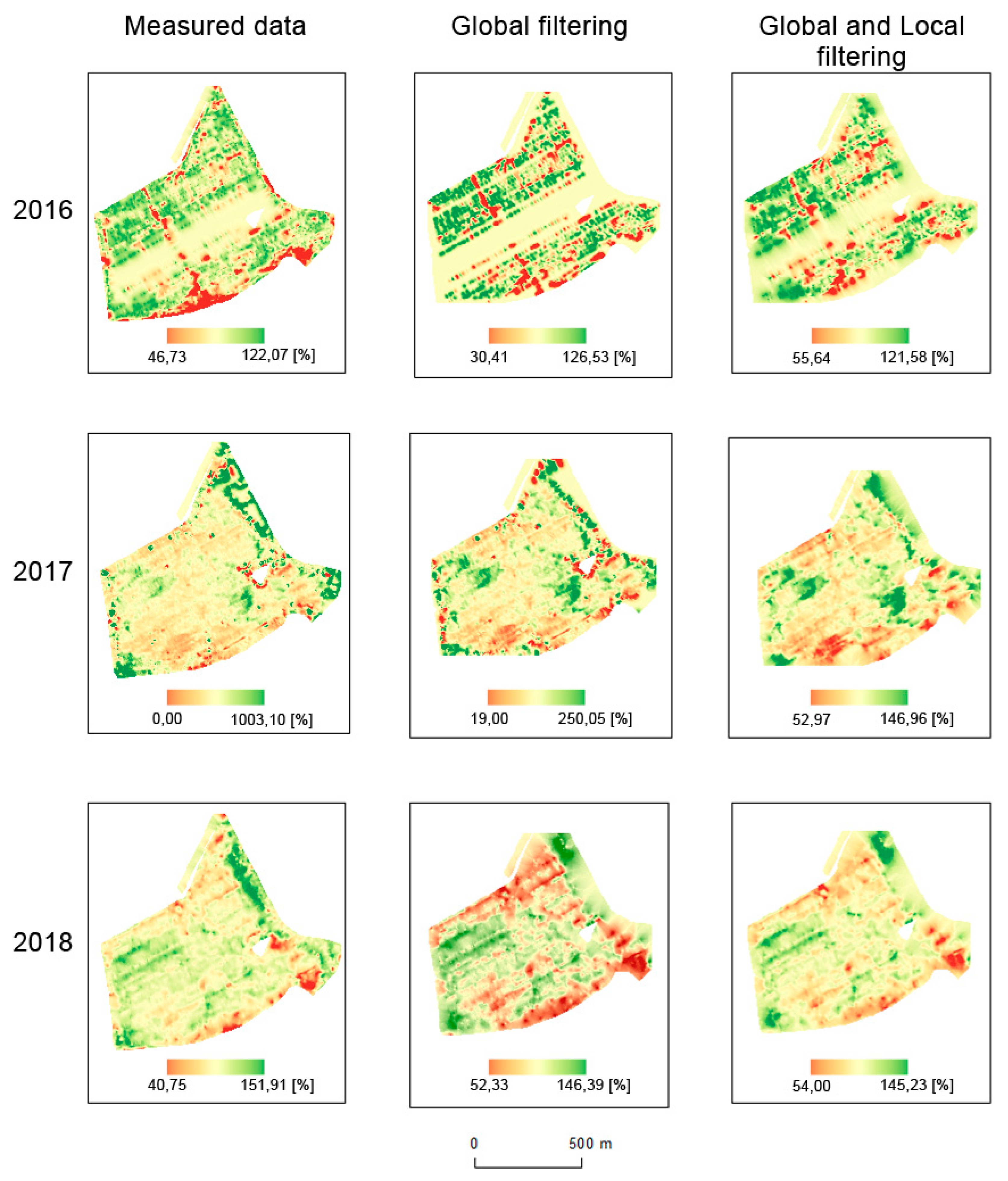
Figure 12.
Interpolations of measured, globally filtered, and both globally and locally filtered data for the Přední prostřední field (%).
Figure 12.
Interpolations of measured, globally filtered, and both globally and locally filtered data for the Přední prostřední field (%).
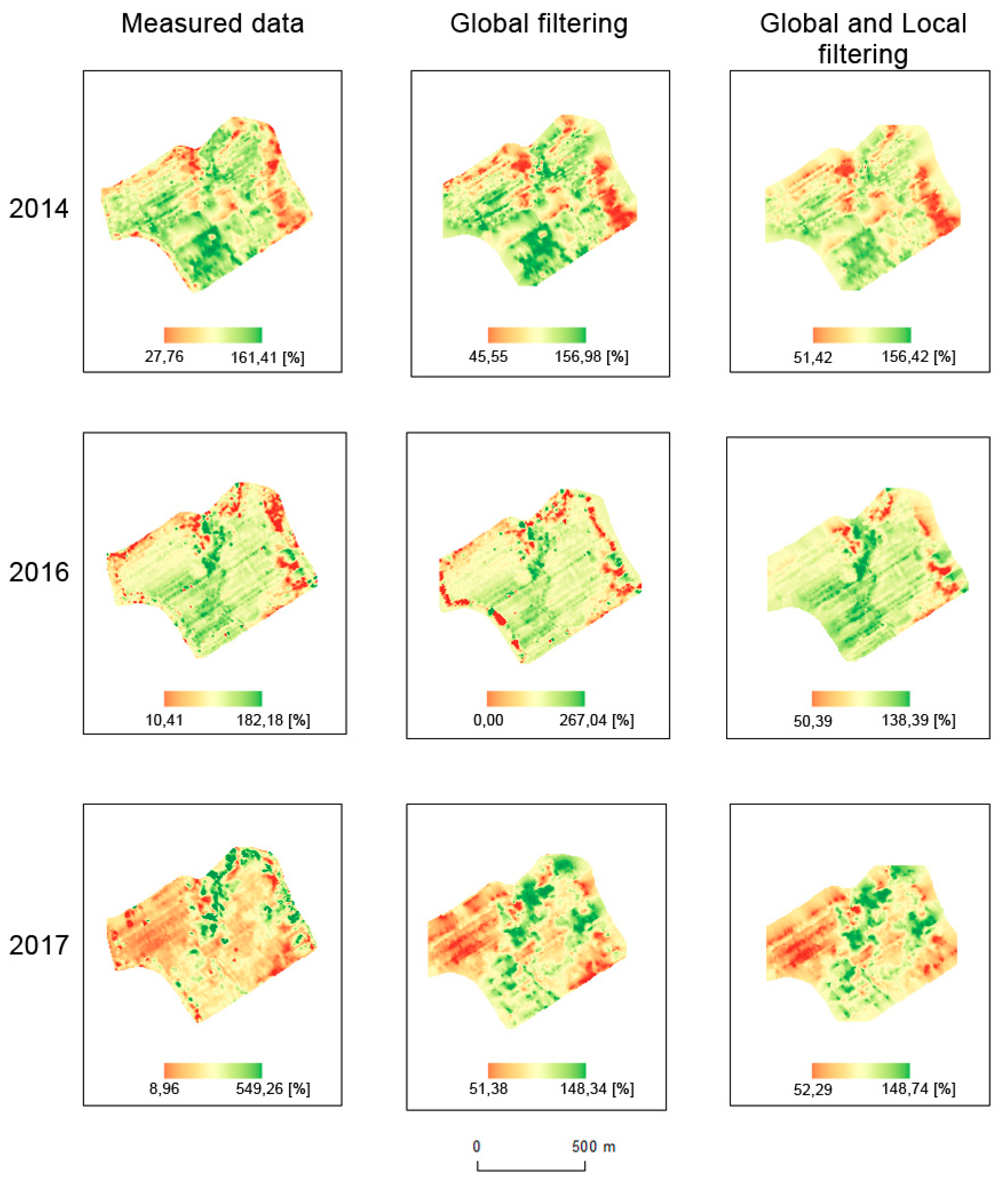
Figure 13.
Interpolations of measured, globally filtered, and both globally and locally filtered data for the Pivovárka field (%).
Figure 13.
Interpolations of measured, globally filtered, and both globally and locally filtered data for the Pivovárka field (%).
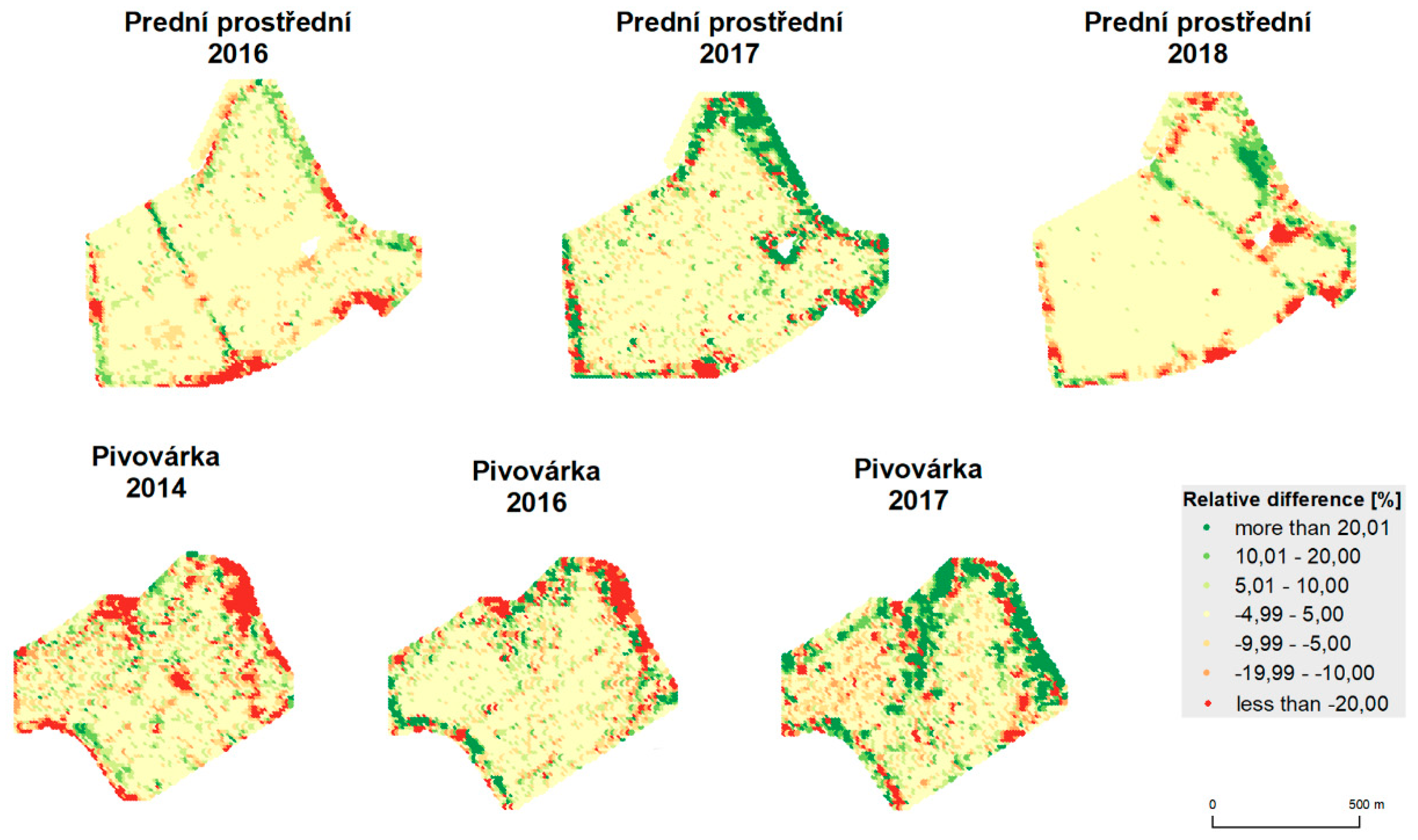
Figure 14.
Relative difference between unfiltered data and data filtered by global filtering.
Figure 14.
Relative difference between unfiltered data and data filtered by global filtering.
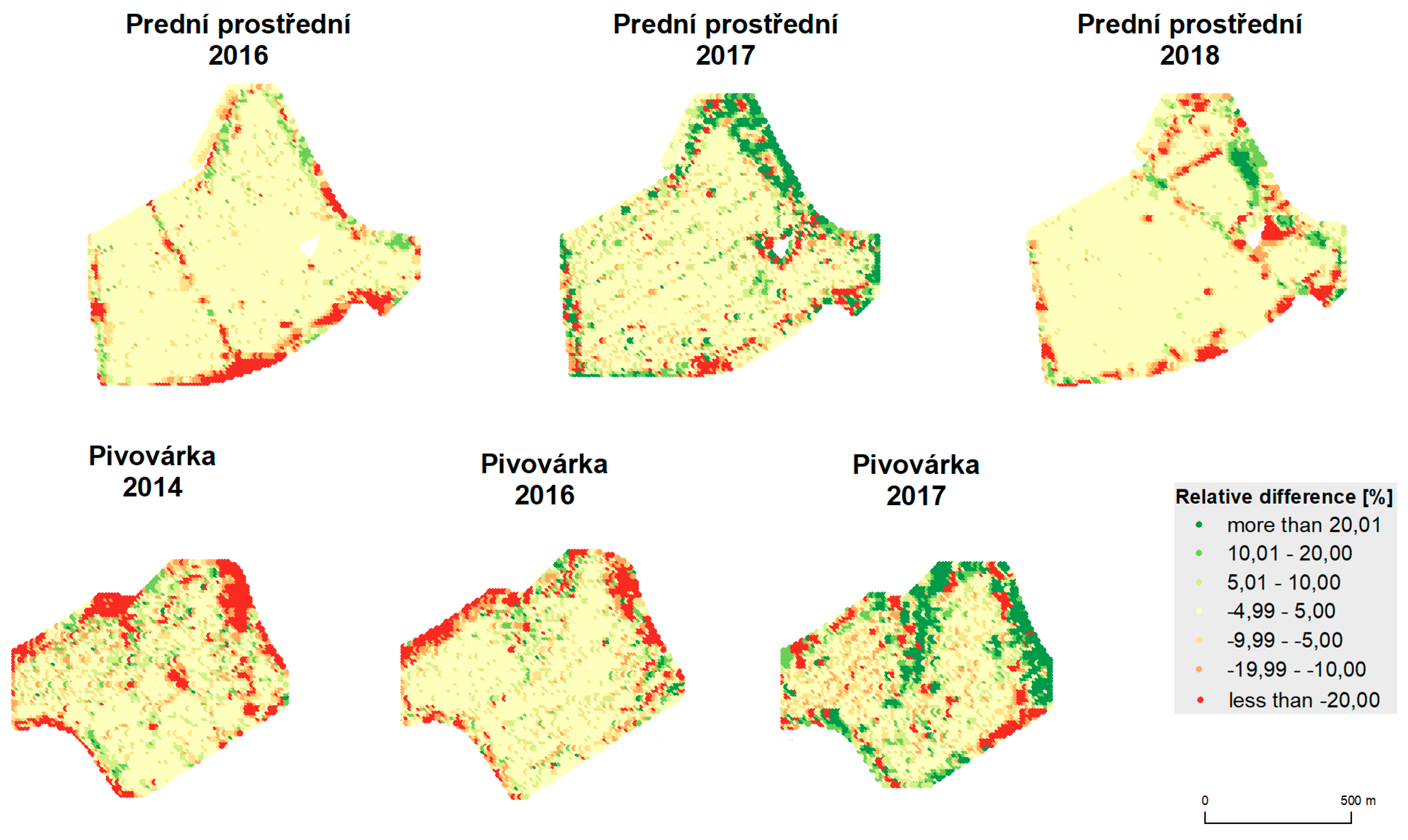
Figure 15.
Relative difference between unfiltered data and data filtered by global and local filtering.
Figure 15.
Relative difference between unfiltered data and data filtered by global and local filtering.
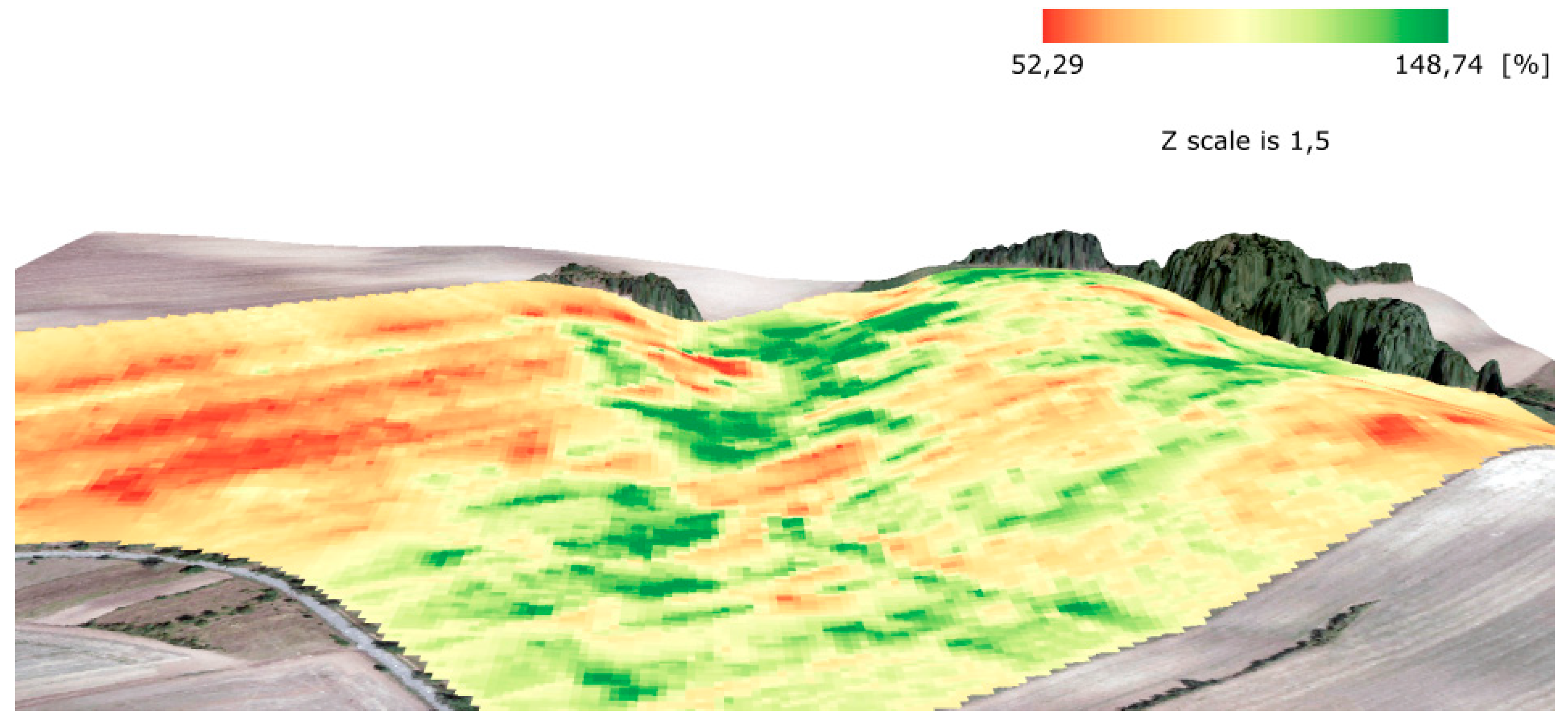
Figure 16.
3D visualization of the measurements processed by means of global and local filtering for the Pivovárka field in 2017. Note the valley with a yield close to 150% of the average for the whole field (in green).
Figure 16.
3D visualization of the measurements processed by means of global and local filtering for the Pivovárka field in 2017. Note the valley with a yield close to 150% of the average for the whole field (in green).
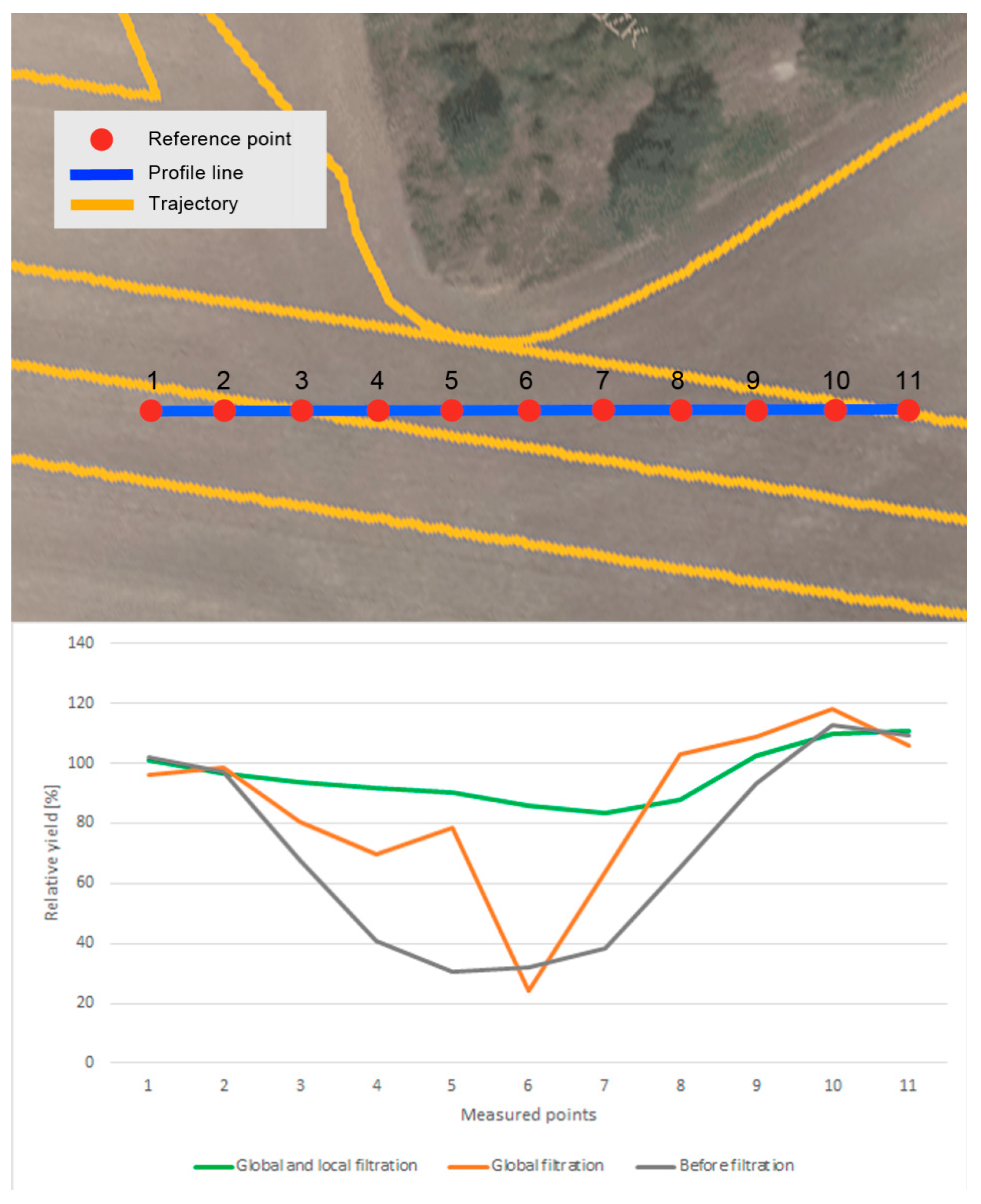
Figure 17.
The differences in relative yield values for (1) interpolation from measured data, (2) interpolation from measured data that were processed by global filters, and (3) interpolation from measured data that were processed by global and local filters.
Figure 17.
The differences in relative yield values for (1) interpolation from measured data, (2) interpolation from measured data that were processed by global filters, and (3) interpolation from measured data that were processed by global and local filters.
Table 1.
Absolute number of sensor measurements, relative density of sensor measurements per hectare, and crops for each year and field.
Table 1.
Absolute number of sensor measurements, relative density of sensor measurements per hectare, and crops for each year and field.
| Name | Date of Harvest | Crop | Number of Measurements | Density per Hectare |
|---|
| Přední prostřední | 24 October, 2016 | Wheat Winter | 16,587 | 271.0 |
| 14 July, 2017 | Barley Spring | 25,580 | 418.0 |
| 7 July, 2018 | Barley Spring | 19,381 | 316.7 |
| Pivovárka | 11 October, 2014 | Corn | 20,232 | 454.7 |
| 24 July, 2016 | Barley Spring | 34,710 | 780.2 |
| 14 July, 2017 | Barley Spring | 16,038 | 360.4 |
Table 2.
Absolute values of measurements filtered by means of global and local filtering for the Přední prostřední field.
Table 2.
Absolute values of measurements filtered by means of global and local filtering for the Přední prostřední field.
| Year | 2016 | 2017 | 2018 |
|---|
| Filtration | Measured Data | Global Filtering | Global and Local Filtering | Measured Data | Global Filtering | Global and Local Filtering | Measured Data | Global Filtering | Global and Local Filtering |
|---|
| Number of points | 16,587 | 11,223 | 10,542 | 25,580 | 21,158 | 20,968 | 19,381 | 13,800 | 13,612 |
Table 3.
Absolute values of measurements filtered by means of global and local filtering for the Pivovárka field.
Table 3.
Absolute values of measurements filtered by means of global and local filtering for the Pivovárka field.
| Year | 2014 | 2016 | 2017 |
|---|
| Filtration | Measured Data | Global Filtering | Global and Local Filtering | Measured Data | Global Filtering | Global and LOCAL Filtering | Measured Data | Global Filtering | Global and Local Filtering |
|---|
| Number of points | 20,232 | 15,527 | 14,663 | 34,710 | 29,785 | 28,950 | 16,038 | 12,485 | 11,404 |
Table 4.
Exploratory Spatial Data Analysis (ESDA) results for setting up the Simple Kriging interpolation for the Přední prostřední field. Parameters were computed separately for (1) interpolation from measured data, (2) interpolation from measured data that were processed by global filters, and (3) interpolation from measured data that were processed by global and local filters.
Table 4.
Exploratory Spatial Data Analysis (ESDA) results for setting up the Simple Kriging interpolation for the Přední prostřední field. Parameters were computed separately for (1) interpolation from measured data, (2) interpolation from measured data that were processed by global filters, and (3) interpolation from measured data that were processed by global and local filters.
| Year | 2016 | 2017 | 2018 |
|---|
| Filtration | Measured Data | Global | Global and Local | Measured Data | Global | Global and Local | Measured Data | Global | Global and Local |
|---|
| Lag Size | 4.668 | 2.243 | 6.520 | 3.285 | 4.048 | 18.516 | 13.054 | 12.157 | 14.794 |
| Number of Lags | 12 | 12 | 12 | 12 | 12 | 12 | 12 | 12 | 12 |
| Root-Mean-Square Standardized | 1.169 | 1.823 | 0.827 | 10.853 | 12.630 | 0.977 | 1.413 | 0.963 | 0.895 |
| Average Standard Error | 6.233 | 3.630 | 7.134 | 1.229 | 0.707 | 8.690 | 4.974 | 6.900 | 7.009 |
| Root-Mean-Square | 5.559 | 5.359 | 5.306 | 9.324 | 8.567 | 8.399 | 6.885 | 6.505 | 6.291 |
Table 5.
ESDA results for setting up the Simple Kriging interpolation for the Pivovárka field. Parameters were computed separately for (1) interpolation from measured data, (2) interpolation from measured data that were processed by global filters, and (3) interpolation from measured data that were processed by global and local filters.
Table 5.
ESDA results for setting up the Simple Kriging interpolation for the Pivovárka field. Parameters were computed separately for (1) interpolation from measured data, (2) interpolation from measured data that were processed by global filters, and (3) interpolation from measured data that were processed by global and local filters.
| Year | 2014 | 2016 | 2017 |
|---|
| Filtration | Measured data | Global | Global and Local | Measured data | Global | Global and Local | Measured data | Global | Global and Local |
|---|
| Lag Size | 16.000 | 13.922 | 13.433 | 5.234 | 4.449 | 25.560 | 4.233 | 22.468 | 21.469 |
| Number of Lags | 12 | 12 | 12 | 12 | 12 | 12 | 12 | 12 | 12 |
| Root-Mean-Square Standardized | 0.755 | 0.901 | 0.920 | 10.361 | 10.516 | 0.919 | 7.313 | 0.621 | 0.616 |
| Average Standard Error | 9.468 | 7.593 | 7.729 | 0.616 | 0.630 | 6.800 | 1.286 | 12.604 | 12.496 |
| Root-Mean-Square | 6.316 | 5.985 | 5.968 | 5.590 | 5.510 | 5.446 | 9.239 | 7.837 | 7.666 |
Table 6.
Descriptive statistics and results of dependent t-test for paired samples. As the number of comparison points was large and the mean and median values were different by less than 10% in all cases, we expect a normal distribution.
Table 6.
Descriptive statistics and results of dependent t-test for paired samples. As the number of comparison points was large and the mean and median values were different by less than 10% in all cases, we expect a normal distribution.
| Field | Year | N | Measured Data | Global Filtering | Global and Local Filtering | Measured Data Versus Global Filtering | Measured Data Versus Global and Local Filtering |
|---|
| m | med | stdv | m | med | stdv | m | med | stdv | t | p-val. | t | p-val. |
|---|
| Přední prostřední | 2016 | 24,767 | 101.514 | 101.957 | 12.164 | 102.859 | 102.404 | 10.014 | 103.914 | 103.745 | 7.792 | −25.7548 | 0.0000 | -45.0429 | 0.0000 |
| 2017 | 23,735 | 101.844 | 96.853 | 37.355 | 97.915 | 96.419 | 25.197 | 98.034 | 96.514 | 15.668 | 18.0595 | 0.0000 | 18.1743 | 0.0000 |
| 2018 | 24,292 | 98.987 | 99.498 | 16.400 | 99.209 | 99.881 | 13.078 | 99.907 | 100.274 | 12.504 | −3.9961 | 0.0001 | −15.6783 | 0.0000 |
| Pivovárka | 2014 | 17,842 | 101.169 | 105.895 | 26.215 | 103.790 | 106.831 | 21.886 | 105.192 | 107.592 | 21.005 | −29.3886 | 0.0000 | −40.4324 | 0.0000 |
| 2016 | 18,040 | 98.039 | 101.060 | 18.387 | 97.389 | 101.452 | 25.626 | 100.478 | 101.553 | 13.757 | 4.0418 | 0.0001 | −30.0504 | 0.0000 |
| 2017 | 17,524 | 103.458 | 95.371 | 43.107 | 94.981 | 93.605 | 21.239 | 94.865 | 92.773 | 19.882 | 34.4959 | 0.0000 | 33.3951 | 0.0000 |
Table 7.
Relative difference between measured data and globally filtered data, and measured data and both globally and locally filtered data for the Přední prostřední field (%).
Table 7.
Relative difference between measured data and globally filtered data, and measured data and both globally and locally filtered data for the Přední prostřední field (%).
| Relative Difference | Percentage of an Area Belonging to a Relative Difference Category |
|---|
| 2016 | 2017 | 2018 |
|---|
| Global Filtering | Global and Local Filtering | Global Filtering | Global and Local Filtering | Global Filtering | Global and Local Filtering |
|---|
| <−20% | 4.04 | 5.73 | 4.77 | 5.81 | 4.21 | 5.70 |
| −20%–−10% | 3.29 | 3.72 | 2.95 | 4.91 | 4.08 | 5.04 |
| −10%–−5% | 8.81 | 6.48 | 7.93 | 8.18 | 4.62 | 6.01 |
| −5%–5% | 73.28 | 77.17 | 61.97 | 65.97 | 77.38 | 79.15 |
| 5%–10% | 6.59 | 4.57 | 8.33 | 8.70 | 4.21 | 4.78 |
| 10%–20% | 3.38 | 2.28 | 5.25 | 3.94 | 3.90 | 3.51 |
| >20% | 0.59 | 0.00 | 8.75 | 8.29 | 1.60 | 1.51 |
Table 8.
Relative difference between measured data and globally filtered data, and measured data and both globally and locally filtered data for field Pivovárka (%).
Table 8.
Relative difference between measured data and globally filtered data, and measured data and both globally and locally filtered data for field Pivovárka (%).
| Relative Difference | Percentage of an Area Belonging to a Relative Difference Category |
|---|
| 2014 | 2016 | 2017 |
|---|
| Global Filtering | Global and Local Filtering | Global Filtering | Global and Local Filtering | Global Filtering | Global and Local Filtering |
|---|
| <−20% | 10.85 | 14.41 | 6.93 | 9.74 | 6.19 | 8.43 |
| −20%–−10% | 8.40 | 10.02 | 5.35 | 7.72 | 6.55 | 7.37 |
| −10%–−5% | 10.83 | 12.51 | 7.20 | 9.94 | 1.56 | 13.34 |
| −5%–5% | 52.58 | 58.97 | 60.86 | 67.06 | 43.74 | 44.55 |
| 5%–10% | 11.85 | 12.41 | 9.30 | 10.06 | 9.30 | 10.67 |
| 10%–20% | 5.12 | 5.32 | 5.15 | 3.90 | 8.57 | 9.30 |
| >20% | 1.36 | 0.77 | 5.21 | 1.32 | 13.45 | 14.76 |
Table 9.
Time investments for interpolations from (1) measured data that were globally filtered, (2) measured data that were locally filtered, and (3) measured data that were globally and locally filtered.
Table 9.
Time investments for interpolations from (1) measured data that were globally filtered, (2) measured data that were locally filtered, and (3) measured data that were globally and locally filtered.
| Testing Field | Number of Measured Points | Area (ha) | Global Filtering | Local Filtering | Global and Local Filtering |
|---|
| Approximate Time consumption (min) | Time Index (min/ha) | Approximate Time Consumption (min) | Time Index (min/ha) | Approximate Time Consumption (min) | Time Index (min/ha) |
|---|
| Zákostelní | 28,658 | 87.02 | 9.25 | 0.11 | 36.5 | 0.42 | 45.75 | 0.53 |
| Miletovsko | 8,406 | 42.52 | 7.75 | 0.18 | 16.5 | 0.39 | 24.25 | 0.57 |
| Koberska | 18,462 | 80.08 | 8.00 | 0.09 | 25.0 | 0.31 | 33.00 | 0.41 |
| Average | 18,509 | 69.87 | 8.50 | 0.13 | 26.0 | 0.37 | 34.33 | 0.50 |

 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}