Comparative Analysis between Error-State and Full-State Error Estimation for KF-Based IMU/GNSS Integration against IMU Faults


Abstract
:1. Introduction
2. Architecture of the IMU/GNSS Integrated Navigation System
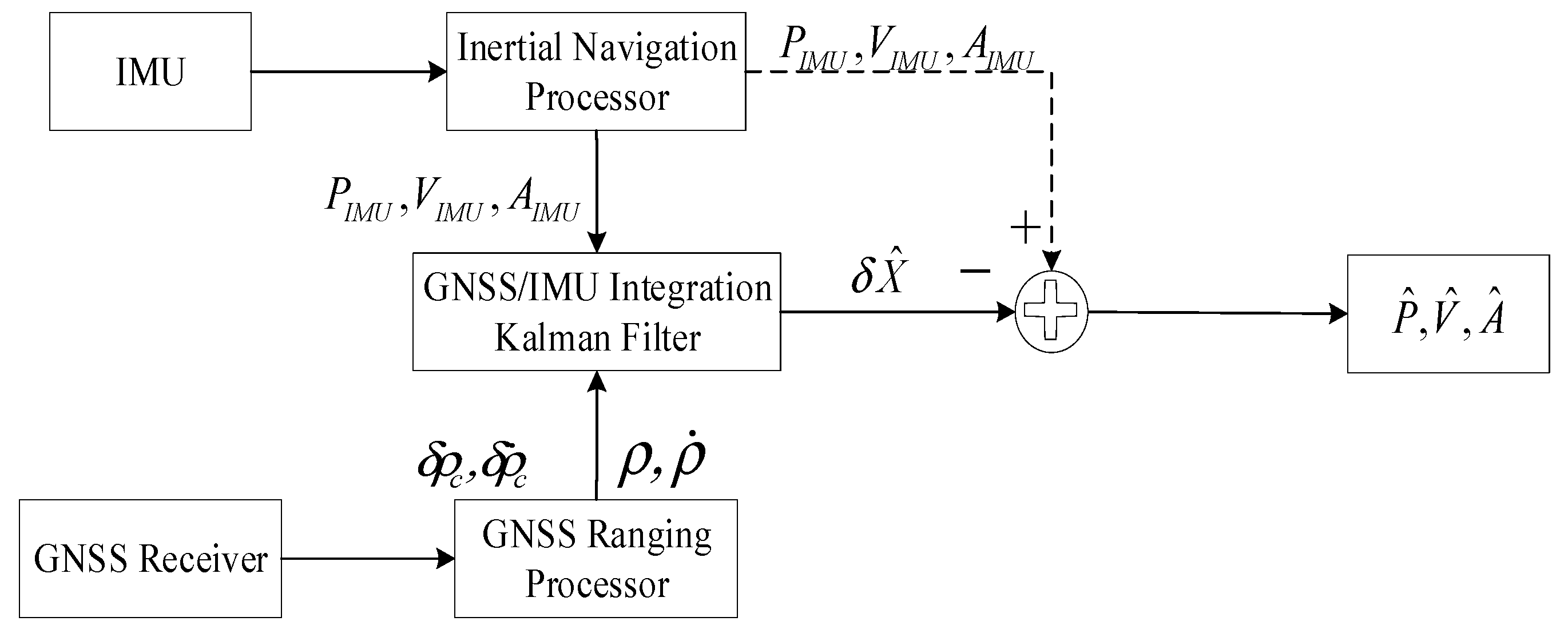
2.1. IMU/GNSS Integration Architecture
2.2. Error-State EKF Model
3. Error Overboundings against IMU Faults
3.1. IMU Faults Propagation in the Error-State EKF
3.2. EKF State Error Caused by IMU Faults
3.3. Error Overboundings
4. Simulation and Analysis
4.1. Simulation Conditions
4.2. Simulation Under Injected IMU Gyroscope and Accelerometer Faults
4.3. Computational Efficiency Comparison
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Full-State EKF Model
Appendix B. Detailed Expressions for the EKF, Matrices, and Coefficient Used in This Paper
Appendix B.1. The Detailed Expressions for the EKF
Appendix B.2. The Detailed Expression of the Coordinate Transformation Matrix
Appendix B.3. The Detailed Calculation of the Coefficient Kmd,IMU
Appendix C. IMU Faults Propagation in the Full-State EKF
Appendix D. Nomenclature
| Φk | dynamic state transition matrix at epoch k |
| Γuk | input coefficient matrix at epoch k |
| Γwk | process noise matrix at epoch k |
| control input vector of IMU measurements of the specific force and angular rate | |
| process noise vector at epoch k | |
| Kalman gain at epoch k | |
| estimate of the measurement produced by the states estimated by the Kalman filter | |
| measurement matrix at epoch k | |
| EKF innovation vector at epoch k | |
| attitude vector (rad) | |
| velocity vector (m/s) | |
| position vector (m) | |
| coordinate transformation matrix from the body frame to the Earth frame | |
| Earth rotation rate (rad/s) | |
| gravity vector in the Earth-centered Earth-fixed frame (m/s2) | |
| calculates a skew-symmetric matrix | |
| gyroscope fault vector (rad/s) | |
| accelerometer fault vector (m/s2) | |
| difference between the true transformation matrix and the faulty transformation matrix | |
| difference between the true velocity vector and the faulty velocity vector (m/s) | |
| IMU measurement of the specific force (m/s2) | |
| IMU measurement of the angular rate (rad/s) | |
| true value of the specific force (m/s2) | |
| true value of the angular rate (rad/s) | |
| accelerometer bias (m/s2) | |
| gyroscope bias (rad/s) | |
| g-dependent bias related to the specific force (rad·s/m) | |
| accelerometer process noise | |
| gyroscope process noise |
References
- D’Angelo, P.; Fernandez, A. GNSS Multi-System Integrity Algorithm Definition and Evaluation; ION GNSS: Fort Worth, TX, USA, 2007; pp. 3057–3063. [Google Scholar]
- Ochieng, W.Y.; Sauer, K.; Walsh, D. GPS integrity and potential impact on aviation safety. J. Navig. 2003, 56, 51–65. [Google Scholar] [CrossRef]
- Braff, R.; Shively, C.A.; Zelster, M.J. Radio navigation system integrity and reliability. Proc. IEEE 1983, 71, 1214–1223. [Google Scholar] [CrossRef]
- He, D.; Qiao, Y.; Chan, S. Flight Security and Safety of Drones in Airborne Fog Computing Systems. IEEE Commun. Mag. 2018, 56, 66–71. [Google Scholar] [CrossRef]
- Rhudy, M.; Gross, J.; Gu, Y. Fusion of GPS and Redundant IMU Data for Attitude Estimation. In Proceedings of the AIAA Guidance Navigation and Control Conference, Minneapolis, MN, USA, September 2012; pp. 1–13. [Google Scholar]
- De Giorgio, P.; Somà, A. Reliability testing procedure for MEMS IMUs applied to vibrating environments. Sensors 2010, 10, 456–474. [Google Scholar] [CrossRef]
- Bhatti, U.I.; Ochieng, W.Y. Failure modes and models for integrated GPS/INS systems. J. Navig. 2007, 60, 327–348. [Google Scholar] [CrossRef]
- Bhatti, U.I. An Improved Sensor Level Integrity Algorithm for GPS/INS Integrated System; ION GNSS: Fort Worth, TX, USA, 2006; pp. 3012–3023. [Google Scholar]
- Pullen, S.; Enge, P. Local-Area Differential GNSS Architectures Optimized to Support Unmanned Aerial Vehicles (UAVs); ION ITM: San Diego, CA, USA, 2013; pp. 559–571. [Google Scholar]
- Lee, J.Y.; Kim, M. Integration of Onboard Sensors and Local Area DGNSS to Support High Integrity Unmanned Aerial Vehicles (UAV) Navigation; ION GNSS: Portland, OR, USA, 2016; pp. 1477–1484. [Google Scholar]
- Kim, M.; Lee, J.Y.; Kim, D. Keynote: Design of Local Area DGNSS Architecture to Support Unmanned Aerial Vehicle Networks: Concept of Operations and Safety Requirements Validation; ION PNT: Honolulu, HI, USA, 2017; pp. 992–1001. [Google Scholar]
- Brenner, M. Integrated GPS/inertial fault detection availability. J. Navig. 1996, 43, 111–130. [Google Scholar] [CrossRef]
- Diesel, J.; King, J. Integration of Navigation Systems for Fault Detection, Exclusion, and Integrity Determination—Without WAAS; ION NTM: Anaheim, CA, USA, 1995; pp. 683–692. [Google Scholar]
- Crespillo, O.; Grosch, A.; Skaloud, J.; Meurer, M. Innovation vs Residual KF Based GNSS/INS Autonomous Integrity Monitoring in Single Fault Scenario; ION GNSS: Portland, OR, USA, 2017; pp. 2126–2136. [Google Scholar]
- Joerger, M.; Pervan, B. Kalman filter-based integrity monitoring against sensor faults. JGCD 2013, 36, 349–361. [Google Scholar] [CrossRef]
- Tanil, C.; Khanafseh, S.; Joerger, M.; Pervan, B. An INS monitor to detect GNSS spoofers capable of tracking vehicle position. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 131–143. [Google Scholar] [CrossRef]
- Bhattacharyya, S.; Gebre-Egziabher, D. Kalman filter–based RAIM for GNSS receivers. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2444–2459. [Google Scholar] [CrossRef]
- Lee, J.; Kim, M.; Lee, J.; Pullen, S. Integrity Assurance of Kalman-Filter Based GNSS/IMU Integrated Systems Against IMU Faults for UAV Applications; ION GNSS: Miami, FL, USA, 2018; pp. 2484–2500. [Google Scholar]
- Kevin, G. A General Theory for Inertial Navigator Error Modeling; IEEE/ION PLANS: Monterey, CA, USA, 2008; pp. 1152–1166. [Google Scholar]
- Savage, P.G. Analytical modeling of sensor quantization in strapdown inertial navigation error equations. JGCD 2002, 25, 833–842. [Google Scholar] [CrossRef]
- Madyastha, V.; Ravindra, V.; Mallikarjunan, S. Extended Kalman filter vs. error state Kalman filter for aircraft attitude estimation. In Proceedings of the AIAA Guidance, Navigation, & Control Conference, Portland, OR, USA, August 2011; pp. 2011–6615. [Google Scholar]
- Siebler, B.; Sand, S. Posterior Cramer-Rao Bound and Suboptimal Filtering for IMU/GNSS Based Cooperative Train Localization; ION PLANS: Savannah, GA, USA, 2016; pp. 353–358. [Google Scholar]
- Groves, P.D. Principles of GNSS, Inertial, and Multi-Sensor Integrated Navigation Systems, 1st ed.; Artech House: Boston, London, 2007; pp. 113–117. [Google Scholar]
- Mohdyasin, F.; Nagel, D.J.; Korman, C.E. Noise in MEMS. Meas. Sci. Technol. 2010, 21, 209–213. [Google Scholar]
- Zhu, Z. A Probabilistic Model for Failure of Polycrystaline Silicon MEMS Structures. J. Am. Ceram. Soc. 2015, 98, 1685–1697. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IMU Sensor (Consumer-Grade) | |||
|---|---|---|---|
| Accelerometer | Gyroscope | ||
| Noise () | Bias Noise () | Noise () | Bias Noise () |
| 120 | 150 | 50 | 15 |
| Scheme | Maximum | Minimum | Mean | Variance |
|---|---|---|---|---|
| Error-state | 1.868 × 10−3 s | 8.03 × 10−5 s | 7.573 × 10−4 s | 4.8364 × 10−8 |
| Full-state | 3.954 × 10−3 s | 9.21 × 10−5 s | 9.033 × 10−4 s | 1.4365 × 10−7 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, W.; Song, D.; Wang, Z.; Fang, K. Comparative Analysis between Error-State and Full-State Error Estimation for KF-Based IMU/GNSS Integration against IMU Faults. Sensors 2019, 19, 4912. https://doi.org/10.3390/s19224912
Liu W, Song D, Wang Z, Fang K. Comparative Analysis between Error-State and Full-State Error Estimation for KF-Based IMU/GNSS Integration against IMU Faults. Sensors. 2019; 19(22):4912. https://doi.org/10.3390/s19224912
Chicago/Turabian StyleLiu, Wei, Dan Song, Zhipeng Wang, and Kun Fang. 2019. "Comparative Analysis between Error-State and Full-State Error Estimation for KF-Based IMU/GNSS Integration against IMU Faults" Sensors 19, no. 22: 4912. https://doi.org/10.3390/s19224912
APA StyleLiu, W., Song, D., Wang, Z., & Fang, K. (2019). Comparative Analysis between Error-State and Full-State Error Estimation for KF-Based IMU/GNSS Integration against IMU Faults. Sensors, 19(22), 4912. https://doi.org/10.3390/s19224912