Magnetic-based Soft Tactile Sensors with Deformable Continuous Force Transfer Medium for Resolving Contact Locations in Robotic Grasping and Manipulation


Abstract
:1. Introduction
2. The Proposed Sensor Design Procedure
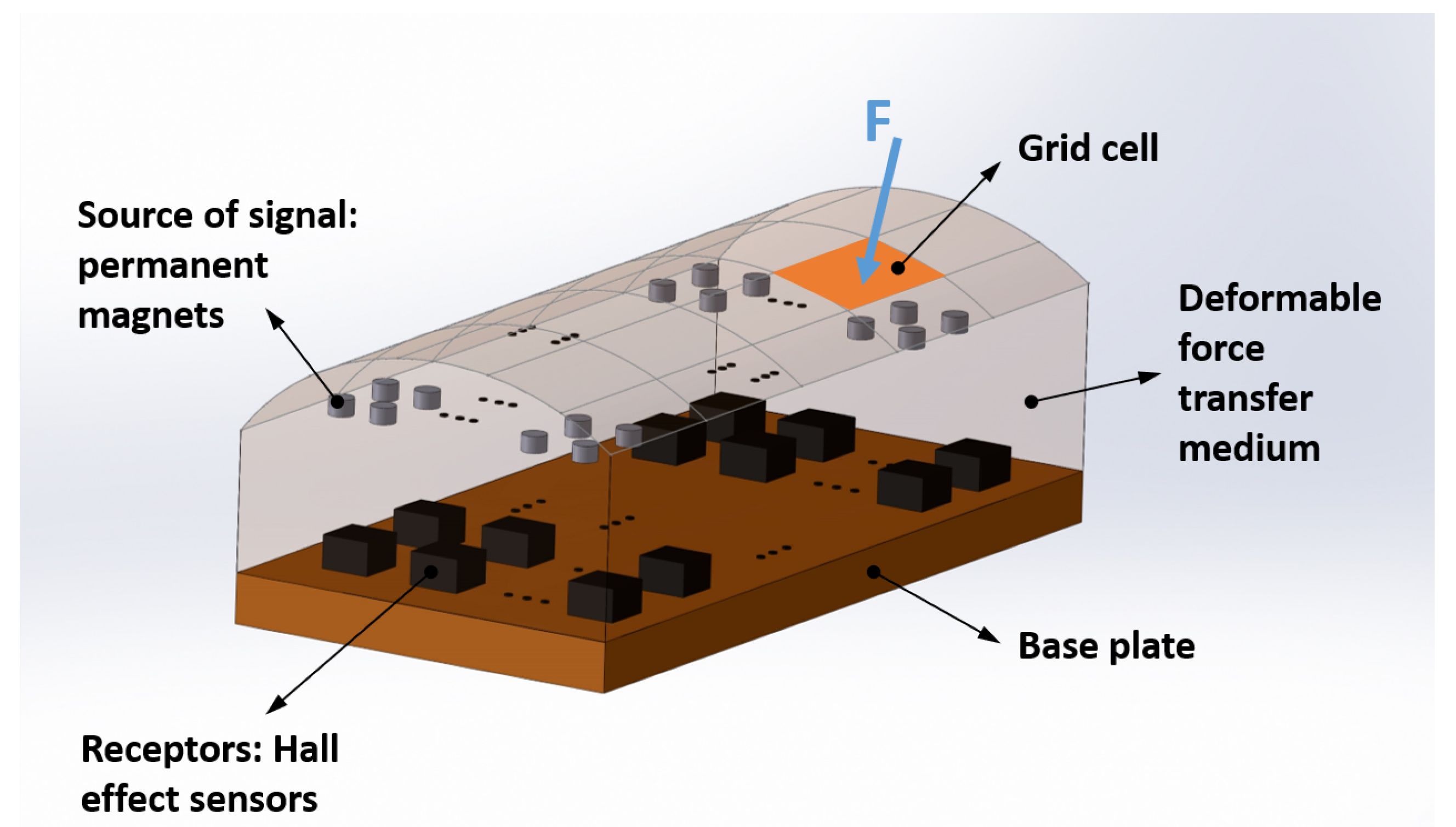
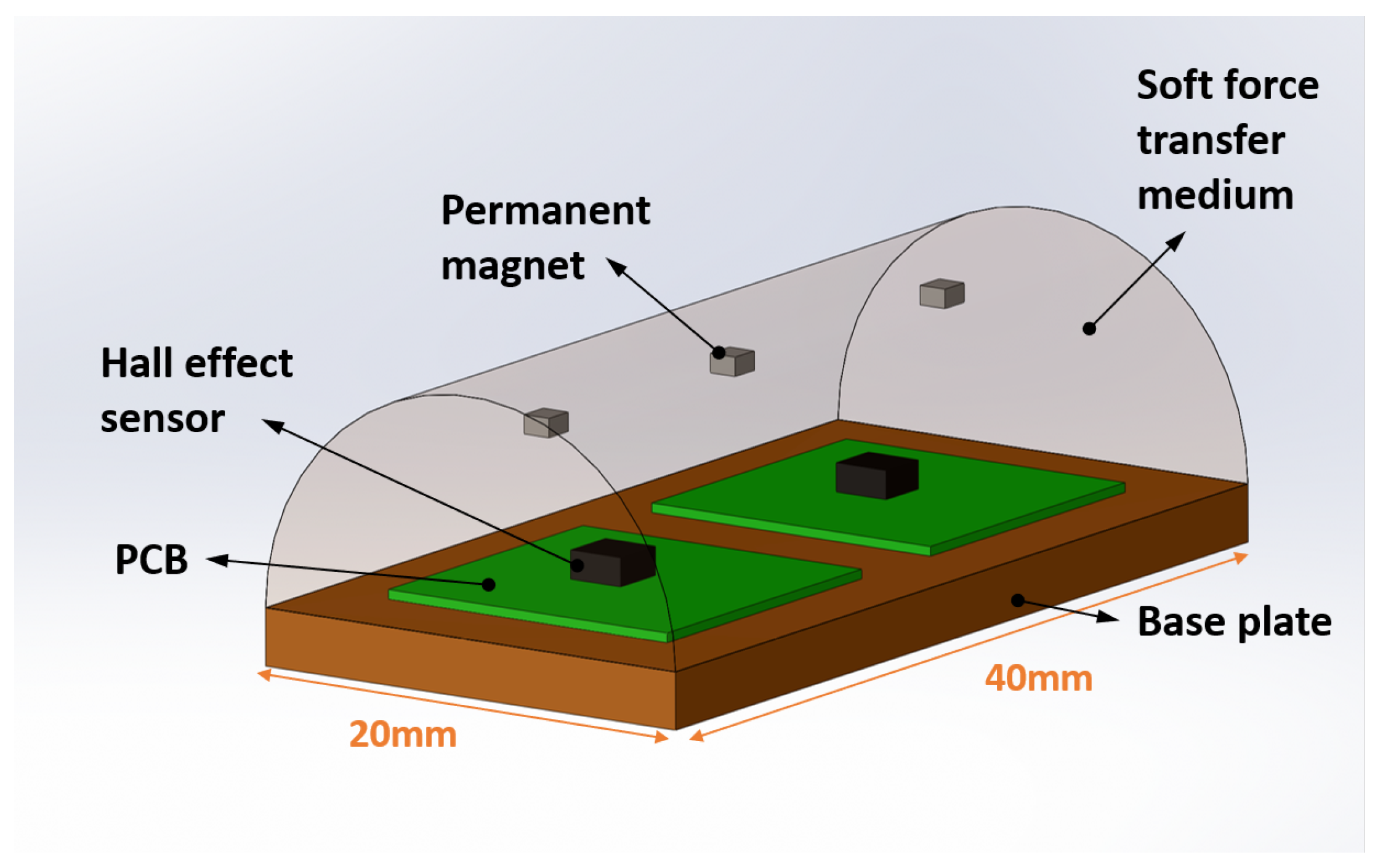
2.1. Sensor Configuration
- the shape and size of the sensor unit (the base plate and the deformable medium)
- the contact surface area on the medium (A [mm])
- the desired spatial resolution of the identified contact location, defined as the number of grid cells (or the dimension of the grid cell) as shown in Figure 1 (k)
- the minimum detectable applied force on sensor ()
- the permanent magnet properties including size and magnetic moment ( [Nm/T])
- and the specifications of the Hall effect sensor, such as the sensitivity (), saturation (), minimum measurable magnetic field ().
2.2. Contact Localisation Algorithm
3. Illustrative Example and Experimental Validation
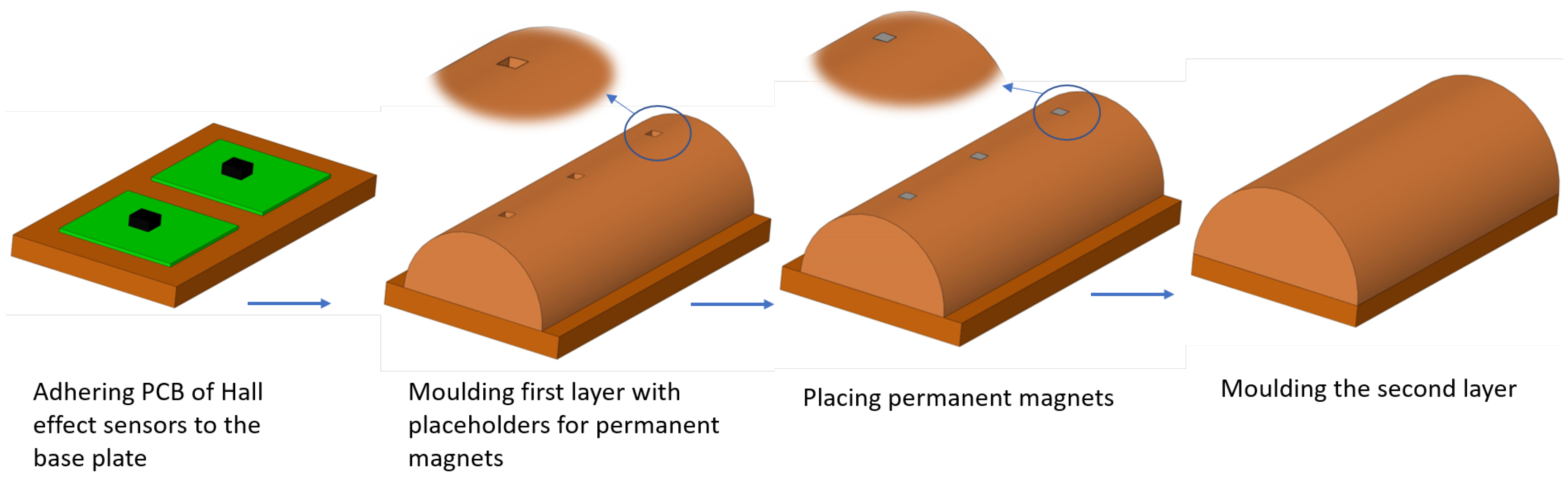
3.1. Sensor Design and Fabrication
- If is high, we need to change the stiffness of the soft force transfer medium in order to have a larger displacement of permanent magnets;
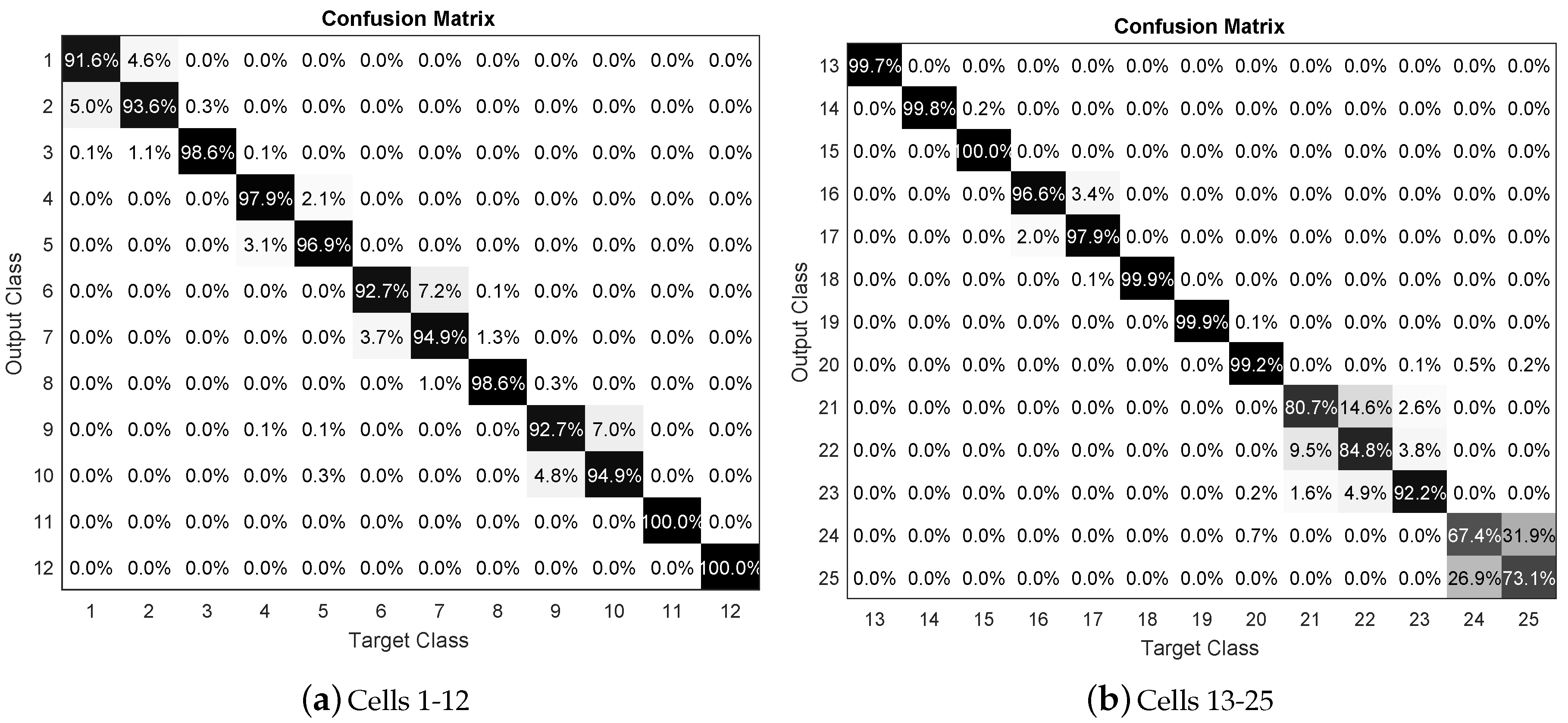
- If a few number of cells have high value, then we need to add more permanent magnets close to those cells;
- If a block of adjacent cells have high value, then we need to add extra Hall effect sensor(s) close to those cells.
3.2. KNN Algorithm for Contact Localisation
3.3. Data Collection Method
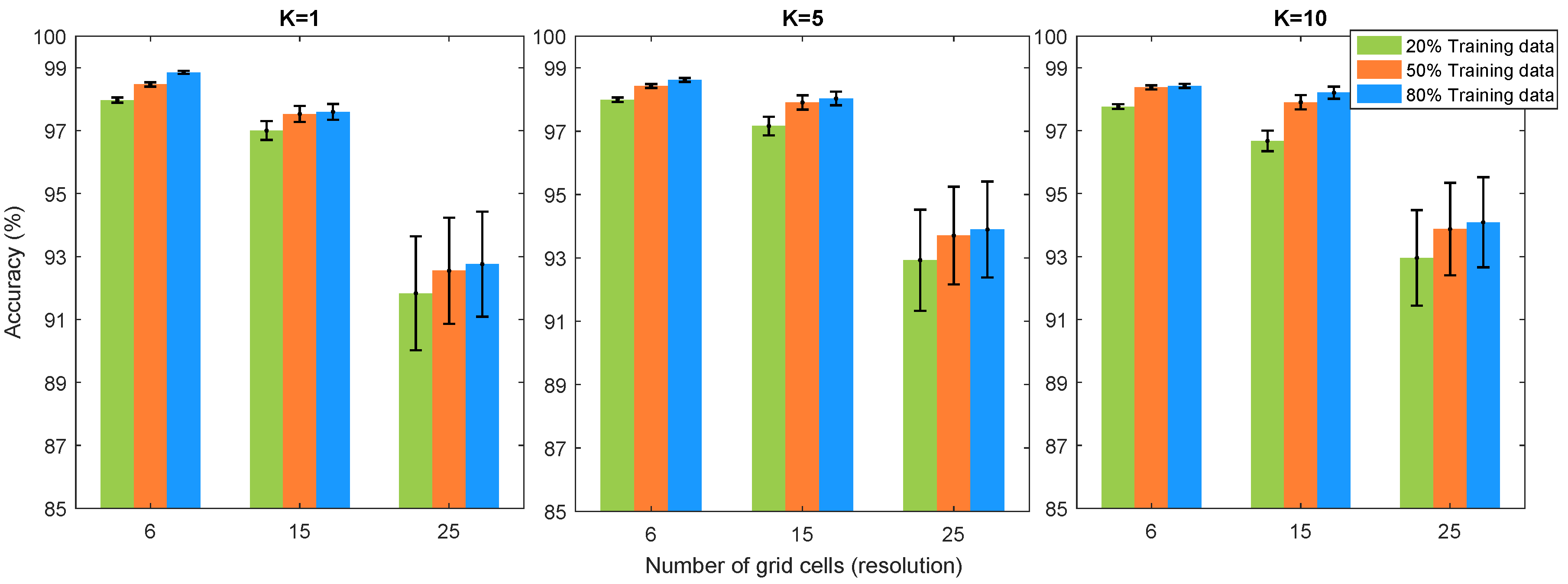
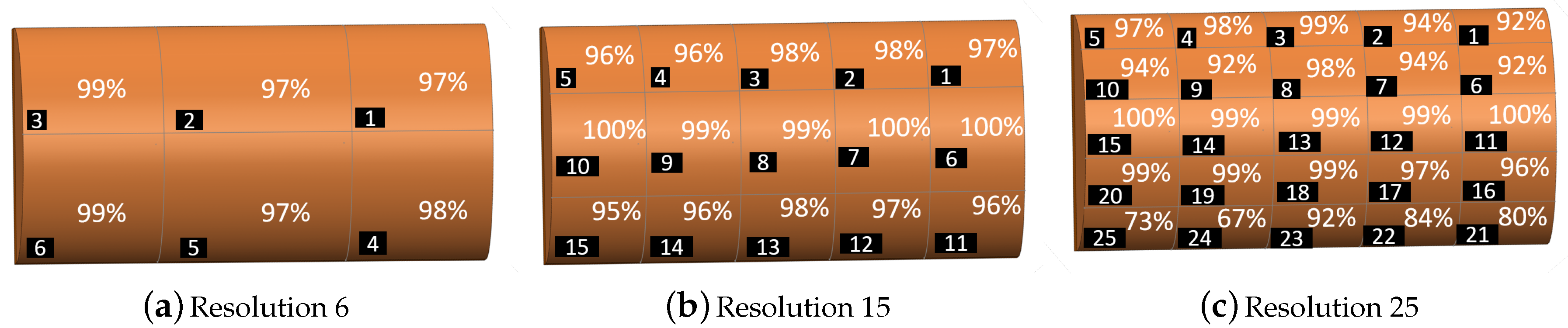
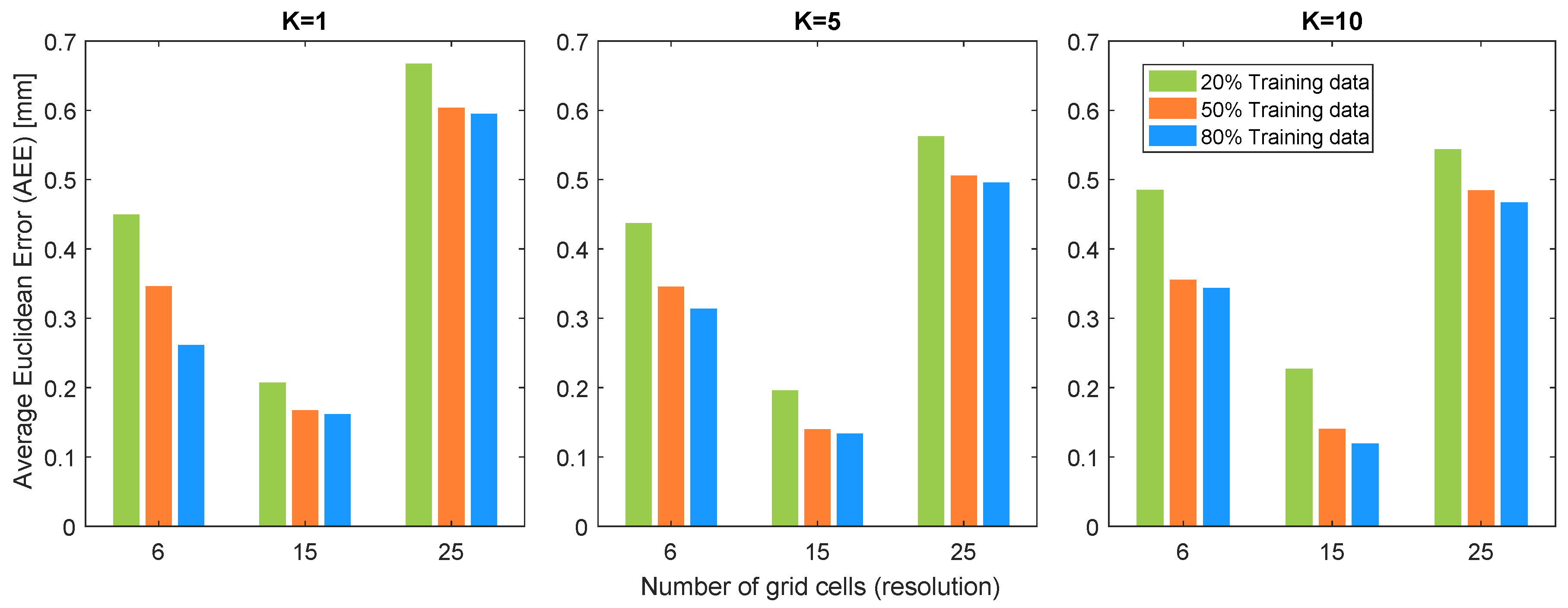
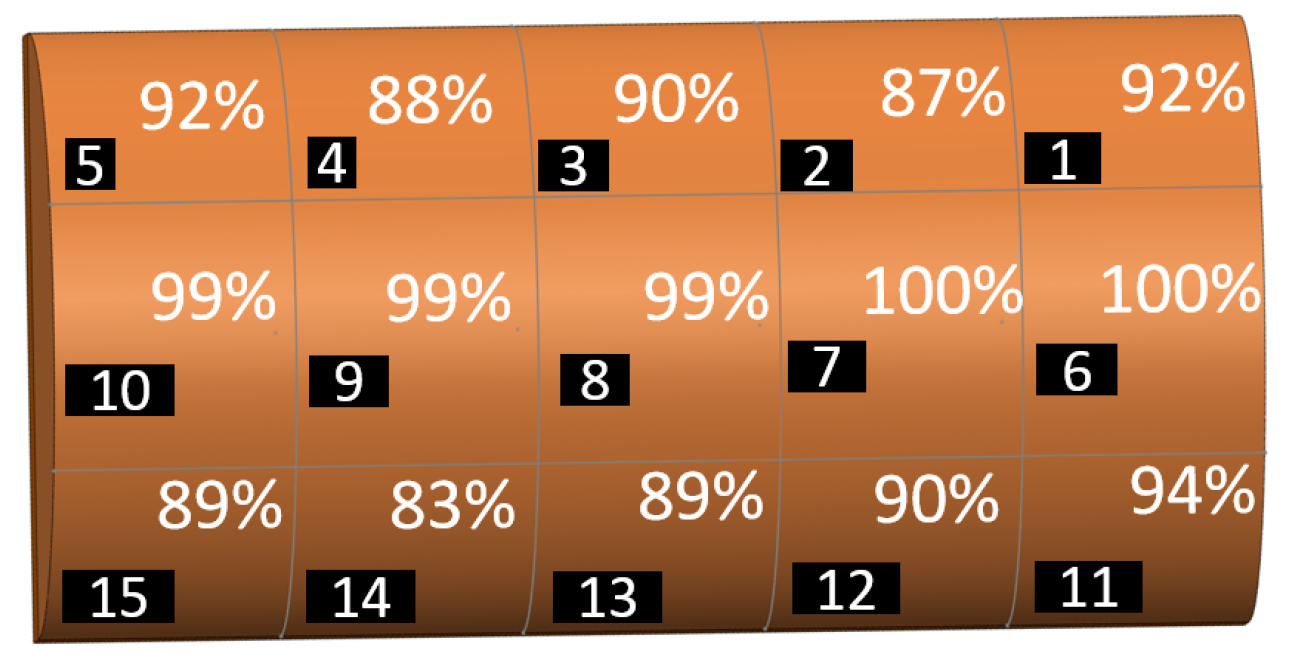
- Sensor resolution: to investigate the accuracy of the KNN contact point localisation algorithm in different resolutions of the sensor, the surface of the sensor is divided to 6, 15 and 25 grid cells. This results in 6, 15 and 25 classes in the KNN algorithm, where each grid cell corresponds to a single class. The force is applied in the normal direction on each grid cell with magnitudes varying from 1.5 N to 10 N and is obtained. This process is repeated five times for each cell. For resolutions 6, 15 and 25, the total number of sample points collected are 2400, 6000 and 10,000, respectively. The total collected data is partitioned randomly in 20–80%, 50–50% and 80–20% ratio for training and testing. In random sampling, every observation in the main data set has an equal probability of being selected for the partition data set. The performance of the algorithm is investigated in these three training-testing ratios. We also investigate the effect of different K values (K = 1, 5, 10) in the accuracy of the contact point localisation.
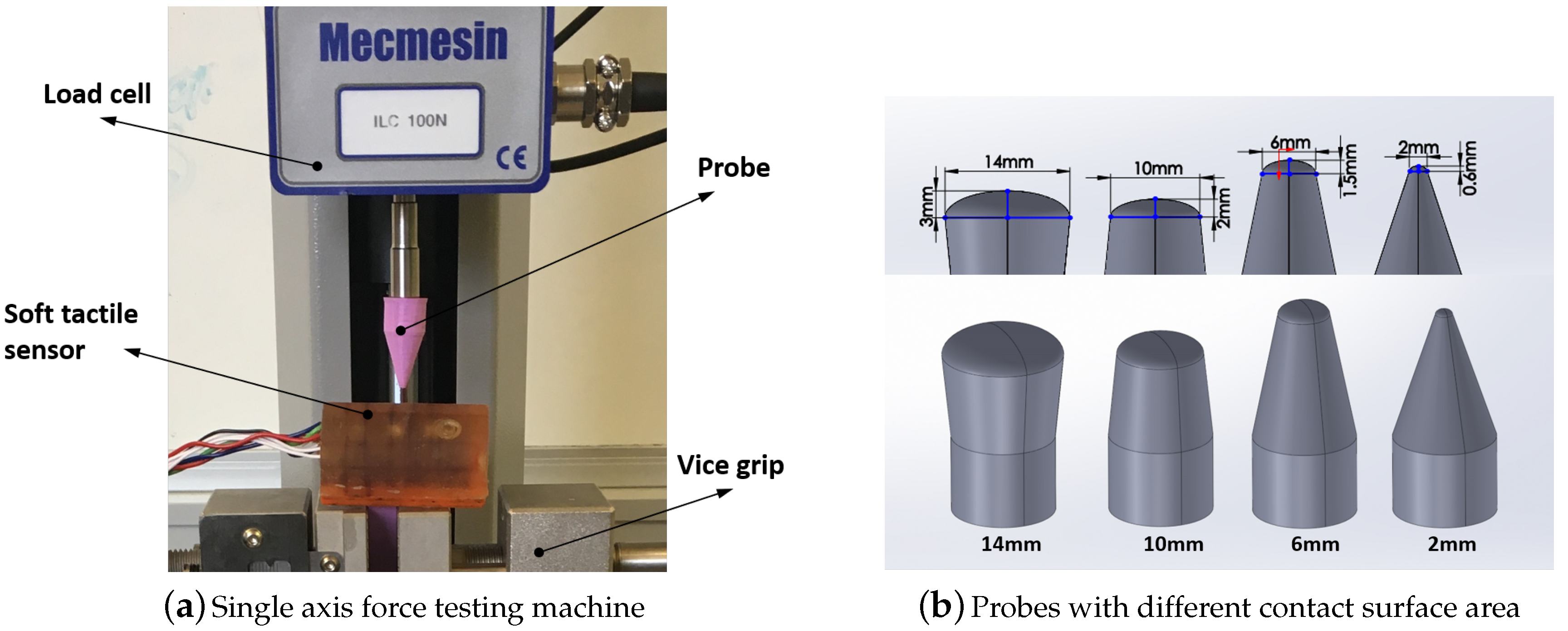
- Contact forces in different directions: the previous set of data are collected where the contact forces are normal to the surface of the sensor. Although, in real-world scenarios, forces can be applied in any directions. Therefore, in this case, forces are applied to each grid cell in random directions. These forces, however, are confined inside a cone with 45 degrees angle with the cell surface. For the data collection for this case, the sensor resolution 15 and 3D printed probes with a tip diameter of 2 mm and 6 mm are used. The KNN algorithm was set to 50% training data and K = 5.
- Contact surface area: to explore the effect of contact surface area on the performance of the sensor, four probes with different tip sizes (2 mm, 6 mm, 10 mm and 14 mm) as shown in Figure 4 are used to collect the data. This represents the variations in the contact surface area that may result in a practical implementation. For example, when the tactile sensor is mounted on a robotic hand and grasp an object such as a mug, where the contact between the sensor and the mug is not just a point, but a surface area. The data collection procedure was similar to the previous data set collection, in different directions with sensor resolution 15, 50% training data and K = 5.
4. Results and Discussion
4.1. Sensor Resolution
4.2. Contact Forces in Different Directions
4.3. Contact Surface Area
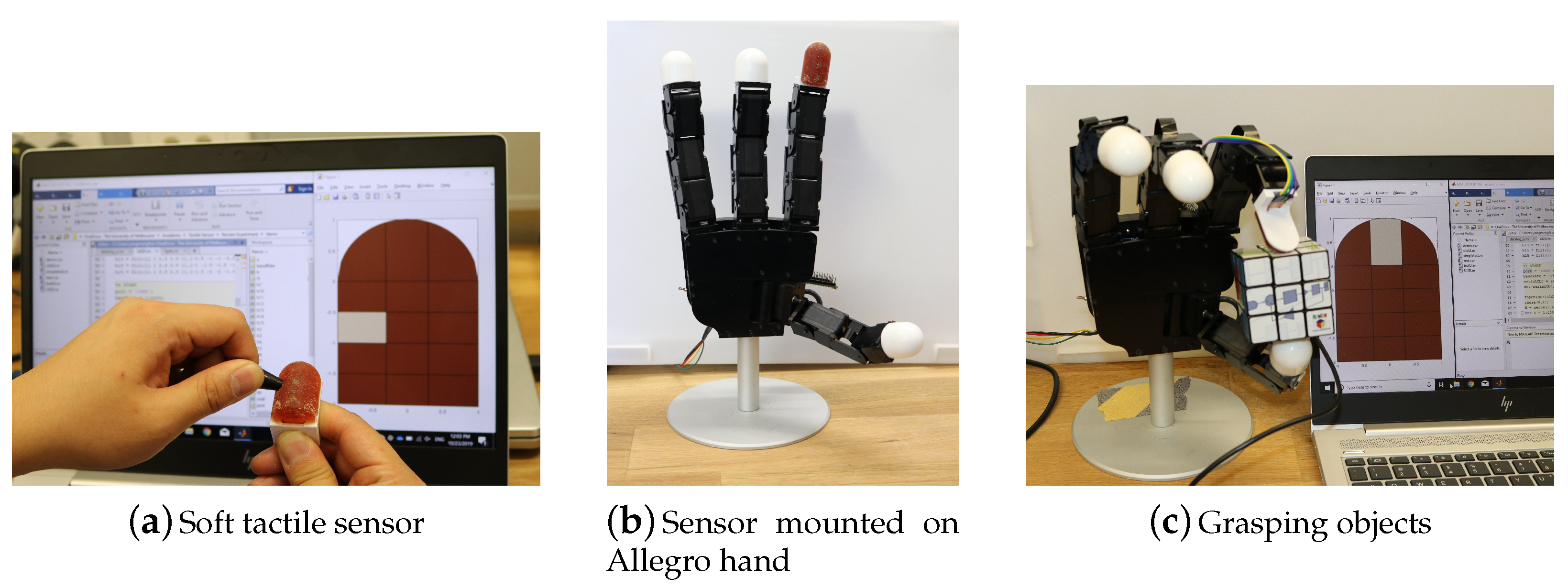
5. Demonstration on Allegro Robotic Hand
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Kerr, J.; Roth, B. Analysis of multifingered hands. Int. J. Robot. Res. 1986, 4, 3–17. [Google Scholar] [CrossRef]
- Fungtammasan, P.; Watanabe, T. Grasp input optimization taking contact position and object information uncertainties into consideration. IEEE Trans. Robot. 2012, 28, 1170–1177. [Google Scholar] [CrossRef]
- Buss, M.; Hashimoto, H.; Moore, J.B. Dextrous hand grasping force optimization. IEEE Trans. Robot. Autom. 1996, 12, 406–418. [Google Scholar] [CrossRef]
- Nahon, M.; Angeles, J. Real-time force optimization in parallel kinematic chains under inequality constraints. IEEE Int. Conf. Robot. Autom. 1991, 8, 439–450. [Google Scholar] [CrossRef]
- Shaw-Cortez, W.; Oetomo, D.; Manzie, C.; Choong, P. Tactile-based blind grasping: A discrete-time object manipulation controller for robotic hands. IEEE Robot. Autom. Lett. 2018, 3, 1064–1071. [Google Scholar] [CrossRef]
- Shaw-Cortez, W.; Oetomo, D.; Manzie, C.; Choong, P. Robust Object Manipulation for Tactile-based Blind Grasping. Control Eng. Pract. 2019, 92, 104136. [Google Scholar] [CrossRef]
- Shaw-Cortez, W.; Oetomo, D.; Manzie, C.; Choong, P. Control Barrier Functions for Mechanical Systems: Theory and Applications to Robotic Grasping. IEEE Trans. Cont. Syst. Tech. 2019, in press. [Google Scholar]
- Eden, J.; Lau, D.; Tan, Y.; Oetomo, D. Unilateral manipulability quality indices: Generalised manipulability measures for unilaterally actuated robots. ASME J. of Mech. Design 2019, 14, 092305-13. [Google Scholar] [CrossRef]
- Kawamura, A.; Tahara, K.; Kurazume, R.; Hasegawa, T. Dynamic grasping for an arbitrary polyhedral object by a multi-fingered hand-arm system. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), St. Louis, MO, USA, 10–15 October 2009; pp. 2264–2270. [Google Scholar]
- Son, J.S.; Cutkosky, M.R.; Howe, R.D. Comparison of contact sensor localization abilities during manipulation. Robot. Auton. Syst. 1996, 17, 217–233. [Google Scholar] [CrossRef]
- Molchanov, A.; Kroemer, O.; Su, Z.; Sukhatme, G.S. Contact localization on grasped objects using tactile sensing. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 216–222. [Google Scholar]
- Kappassov, Z.; Corrales, J.A.; Perdereau, V. Tactile sensing in dexterous robot hands. Robot. Auton. Syst. 2015, 74, 195–220. [Google Scholar] [CrossRef]
- Katragadda, R.B.; Xu, Y. A novel intelligent textile technology based on silicon flexible skins. Sens. Actuators A Phys. 2008, 143, 169–174. [Google Scholar] [CrossRef]
- Noda, K.; Hashimoto, Y.; Tanaka, Y.; Shimoyama, I. MEMS on robot applications. In Proceedings of the International Solid-State Sensors, Actuators and Microsystems Conference, Denver, CO, USA, 21–25 June 2009; pp. 2176–2181. [Google Scholar]
- Kerpa, O.; Weiss, K.; Worn, H. Development of a flexible tactile sensor system for a humanoid robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 27–31 October 2003; Volume 1, pp. 1–6. [Google Scholar]
- Tenzer, Y.; Jentoft, L.P.; Howe, R.D. The feel of MEMS barometers: Inexpensive and easily customized tactile array sensors. IEEE Robot. Autom. Mag. 2014, 21, 89–95. [Google Scholar] [CrossRef]
- Tomo, T.P.; Regoli, M.; Schmitz, A.; Natale, L.; Kristanto, H.; Somlor, S.; Jamone, L.; Metta, G.; Sugano, S. A new silicone structure for uSkin—A soft, distributed, digital 3-axis skin sensor and its integration on the humanoid robot iCub. IEEE Robot. Autom. Lett. 2018, 3, 2584–2591. [Google Scholar] [CrossRef]
- Koike, M.; Saga, S.; Okatani, T.; Deguchi, K. Sensing method of total-internal-reflection-based tactile sensor. In Proceedings of the 2011 IEEE World Haptics Conference, Istanbul, Turkey, 21–24 June 2011; pp. 615–619. [Google Scholar]
- Wang, H.; Totaro, M.; Beccai, L. Toward perceptive soft robots: Progress and challenges. Adv. Sci. 2018, 5, 1800541. [Google Scholar] [CrossRef] [PubMed]
- Winstone, B.; Griffiths, G.; Melhuish, C.; Pipe, T.; Rossiter, J. TACTIP—Tactile fingertip device, challenges in reduction of size to ready for robot hand integration. In Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guangzhou, China, 11–14 December 2012; pp. 160–166. [Google Scholar]
- Ward-Cherrier, B.; Pestell, N.; Cramphorn, L.; Winstone, B.; Giannaccini, M.E.; Rossiter, J.; Lepora, N.F. The tactip family: Soft optical tactile sensors with 3d-printed biomimetic morphologies. Soft Robot. 2018, 5, 216–227. [Google Scholar] [CrossRef] [PubMed]
- Mohammadi, A.; Lavranos, J.; Choong, P.; Oetomo, D. X-Limb: A soft prosthetic hand with user-friendly interface. In International Conference on NeuroRehabilitation; Springer: Berlin/Heidelberg, Germany, 2018; pp. 82–86. [Google Scholar]
- Godfrey, S.B.; Zhao, K.D.; Theuer, A.; Catalano, M.G.; Bianchi, M.; Breighner, R.; Bhaskaran, D.; Lennon, R.; Grioli, G.; Santello, M.; et al. The SoftHand Pro: Functional evaluation of a novel, flexible, and robust myoelectric prosthesis. PLoS ONE 2018, 13, e0205653. [Google Scholar] [CrossRef] [PubMed]
- Tomo, T.; Somlor, S.; Schmitz, A.; Jamone, L.; Huang, W.; Kristanto, H.; Sugano, S. Design and characterization of a three-axis hall effect-based soft skin sensor. Sensors 2016, 16, 491. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; De Boer, G.; Kow, J.; Alazmani, A.; Ghajari, M.; Hewson, R.; Culmer, P. Design methodology for magnetic field-based soft tri-axis tactile sensors. Sensors 2016, 16, 1356. [Google Scholar] [CrossRef] [PubMed]
- Funabashi, S.; Yan, G.; Geier, A.; Schmitz, A.; Ogata, T.; Sugano, S. Morphology-Specific Convolutional Neural Networks for Tactile Object Recognition with a Multi-Fingered Hand. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 57–63. [Google Scholar]
- Dwivedi, A.; Ramakrishnan, A.; Reddy, A.; Patel, K.; Ozel, S.; Onal, C.D. Design, modeling, and validation of a soft magnetic 3-D force sensor. IEEE Sens. J. 2018, 18, 3852–3863. [Google Scholar] [CrossRef]
- Russo, S.; Assaf, R.; Carbonaro, N.; Tognetti, A. Touch Position Detection in Electrical Tomography Tactile Sensors Through Quadratic Classifier. IEEE Sens. J. 2018, 19, 474–483. [Google Scholar] [CrossRef]
- Jackson, J.D. Classical Electrodynamics; Wiley: New York, NY, USA, 2017. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training Dataset | Testing Dataset | |||
|---|---|---|---|---|
| 2 mm Probe | 6 mm Probe | 10 mm Probe | 14 mm Probe | |
| 2 mm probe | 98% | 63% | 64% | 55% |
| 6 mm probe | 45% | 98% | 83% | 73% |
| 10 mm probe | 49% | 80% | 99% | 92% |
| 14 mm probe | 44% | 71% | 95% | 99% |
| All probes | 97% | |||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohammadi, A.; Xu, Y.; Tan, Y.; Choong, P.; Oetomo, D. Magnetic-based Soft Tactile Sensors with Deformable Continuous Force Transfer Medium for Resolving Contact Locations in Robotic Grasping and Manipulation. Sensors 2019, 19, 4925. https://doi.org/10.3390/s19224925
Mohammadi A, Xu Y, Tan Y, Choong P, Oetomo D. Magnetic-based Soft Tactile Sensors with Deformable Continuous Force Transfer Medium for Resolving Contact Locations in Robotic Grasping and Manipulation. Sensors. 2019; 19(22):4925. https://doi.org/10.3390/s19224925
Chicago/Turabian StyleMohammadi, Alireza, Yangmengfei Xu, Ying Tan, Peter Choong, and Denny Oetomo. 2019. "Magnetic-based Soft Tactile Sensors with Deformable Continuous Force Transfer Medium for Resolving Contact Locations in Robotic Grasping and Manipulation" Sensors 19, no. 22: 4925. https://doi.org/10.3390/s19224925
APA StyleMohammadi, A., Xu, Y., Tan, Y., Choong, P., & Oetomo, D. (2019). Magnetic-based Soft Tactile Sensors with Deformable Continuous Force Transfer Medium for Resolving Contact Locations in Robotic Grasping and Manipulation. Sensors, 19(22), 4925. https://doi.org/10.3390/s19224925