An Analytical Model for Interference Alignment in Broadcast Assisted VANETs

Abstract
:1. Introduction
1.1. Literature Review
1.2. Goals of This Paper and Main Contributions
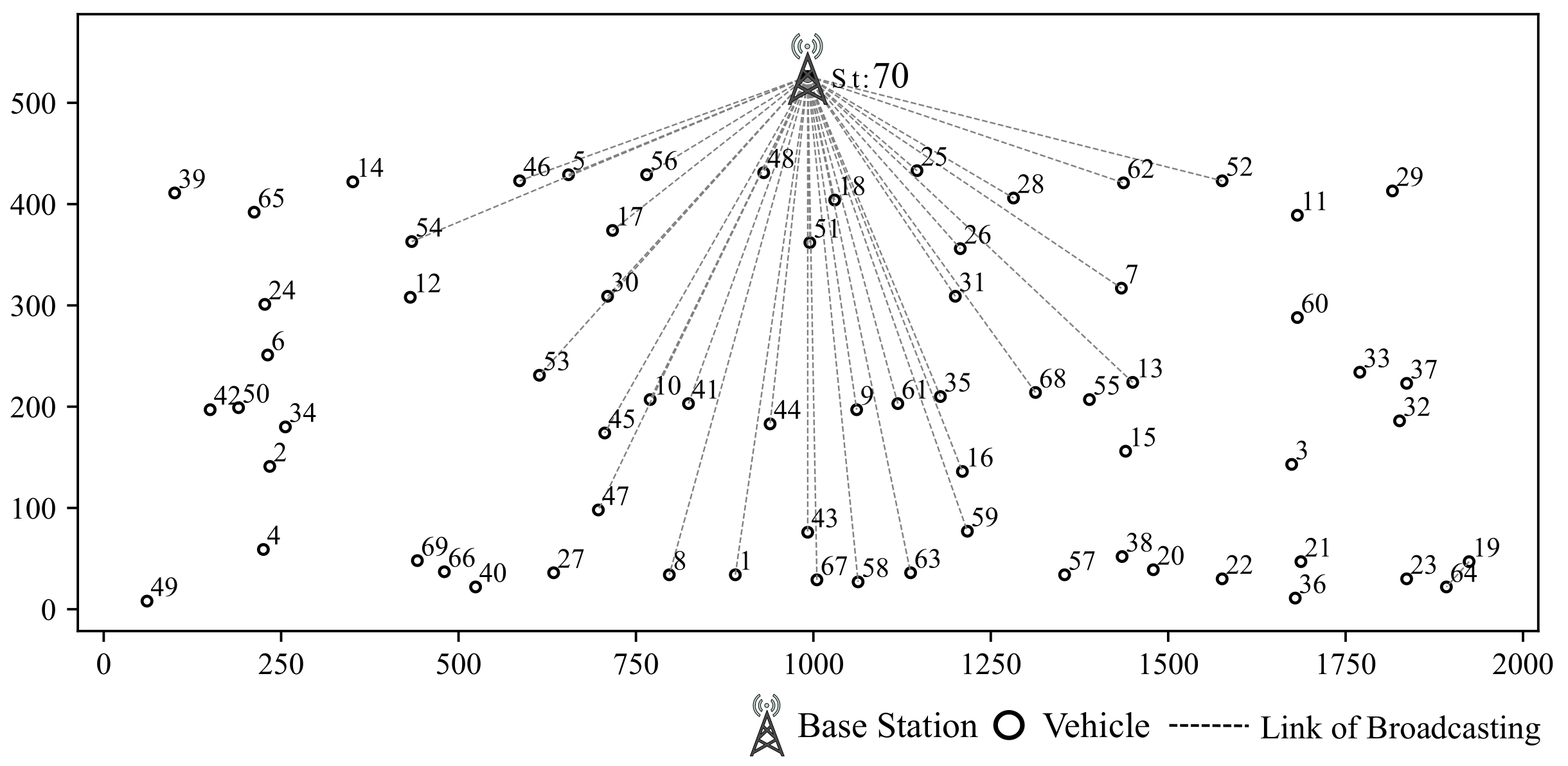
- Depending on analyzing communication flow between base station and vehicles in VANETs, we construct V2V and V2I broadcast model. In this model, IA technology is adopted in upload transmission for V2I in VANETs.
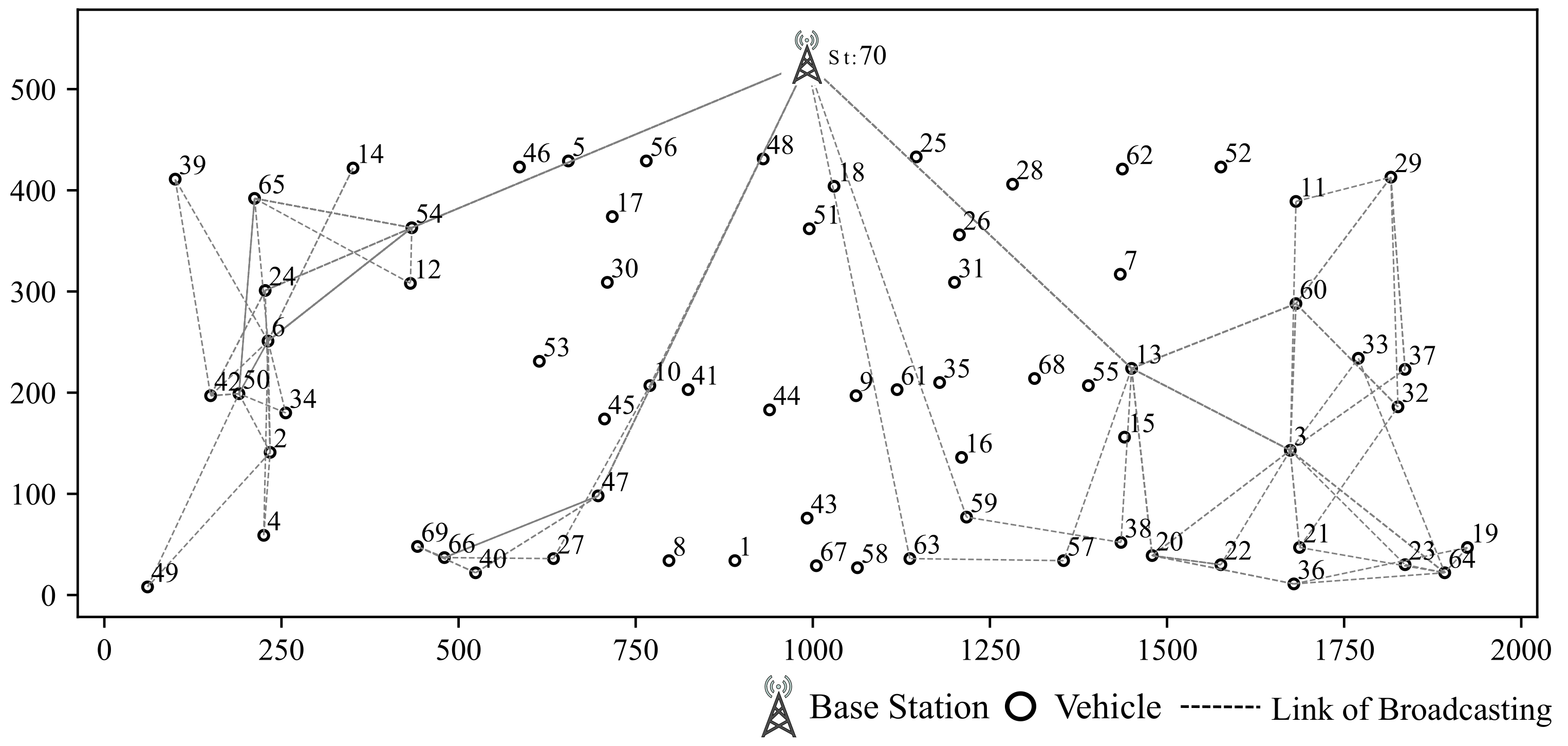
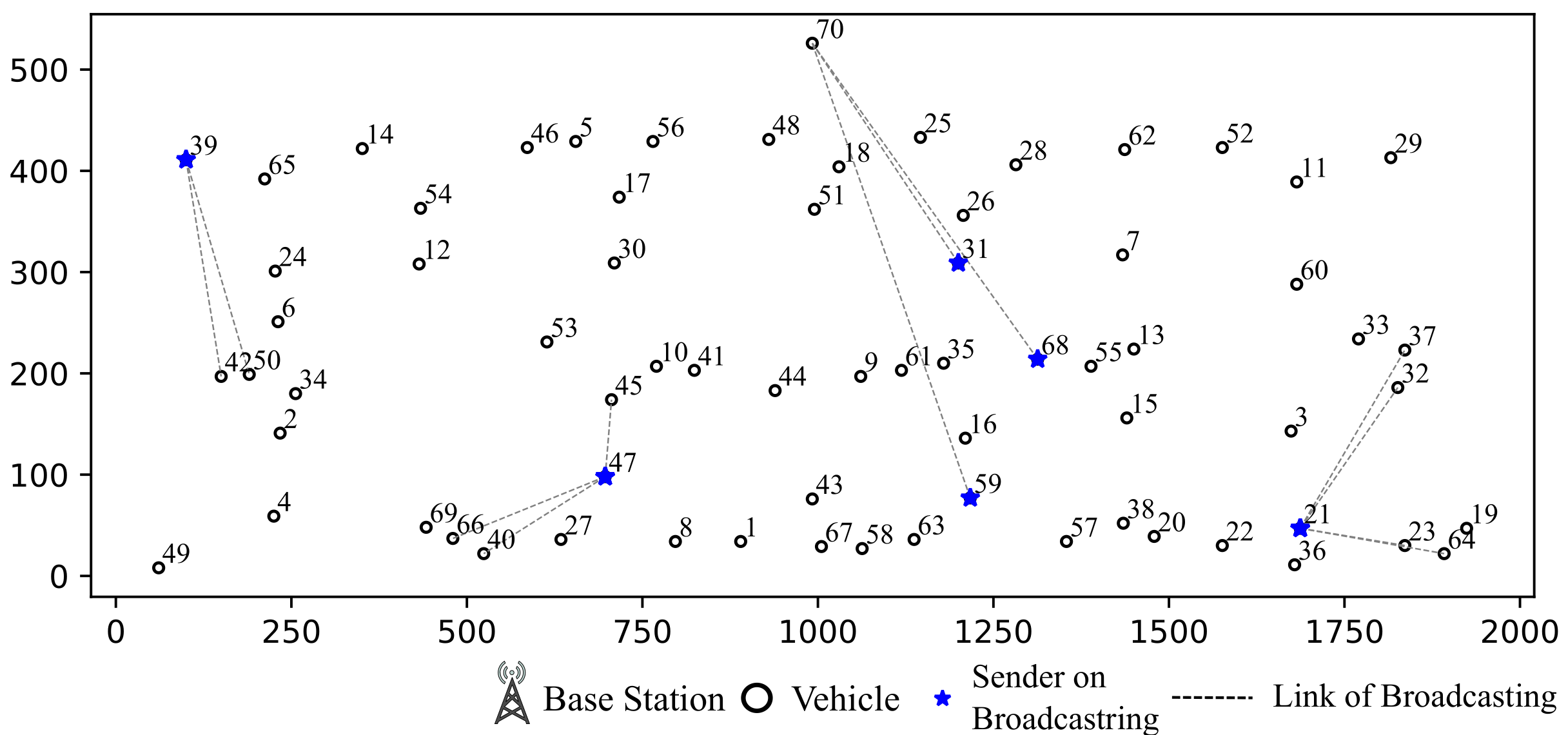
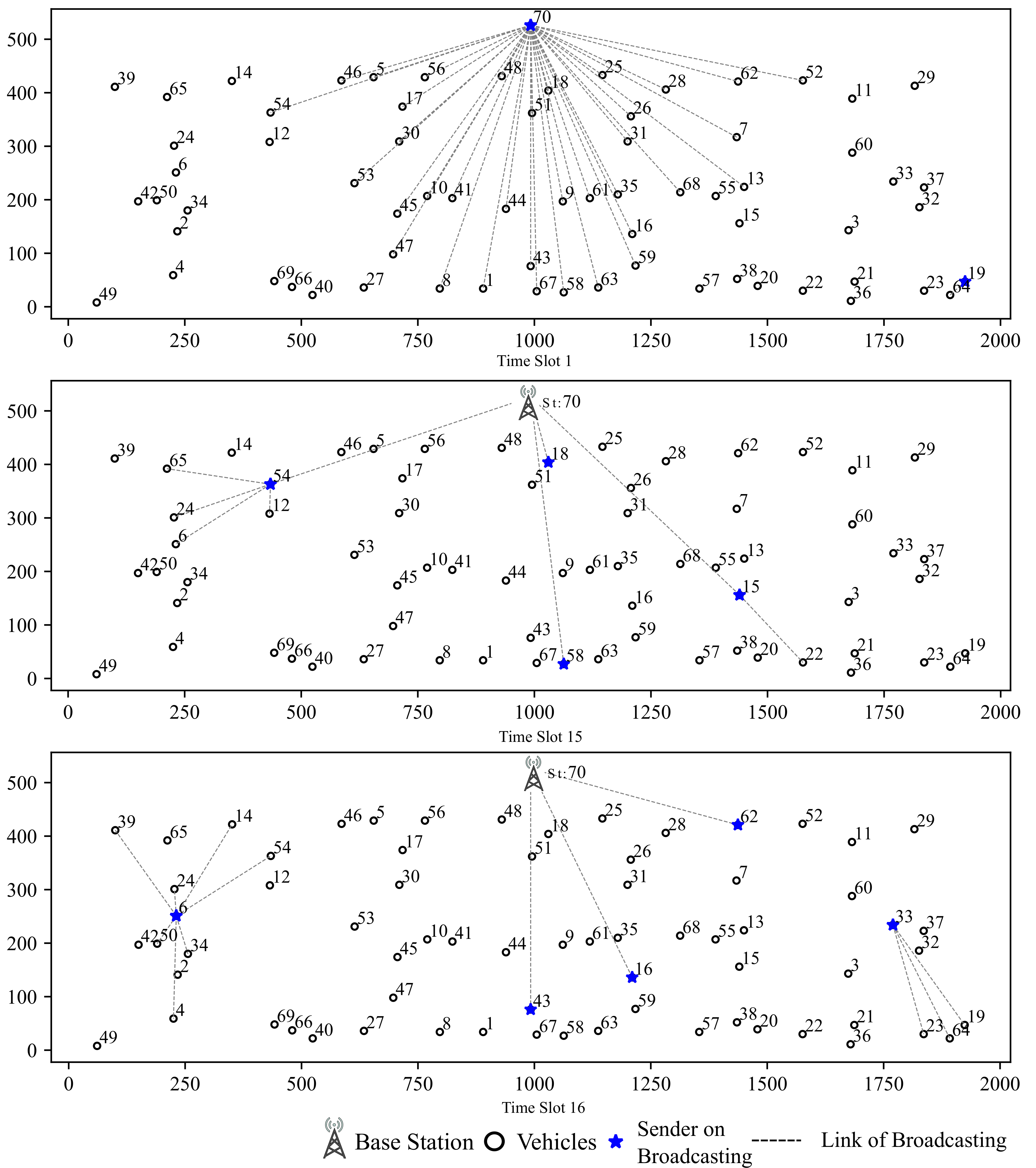
- Combining characteristics of safety-related information, we build a data-driven assisted transmission model to improve link reuse rate.
- We propose an optimization problem of minimizing total number of time slots required for safety information sharing in VANETs. In order to solve this problem, we reform constraints in optimization problem by transforming quadratic items into multiple linear constraints, which simplify the optimization problem.
1.3. Organization of this Paper
2. System Model
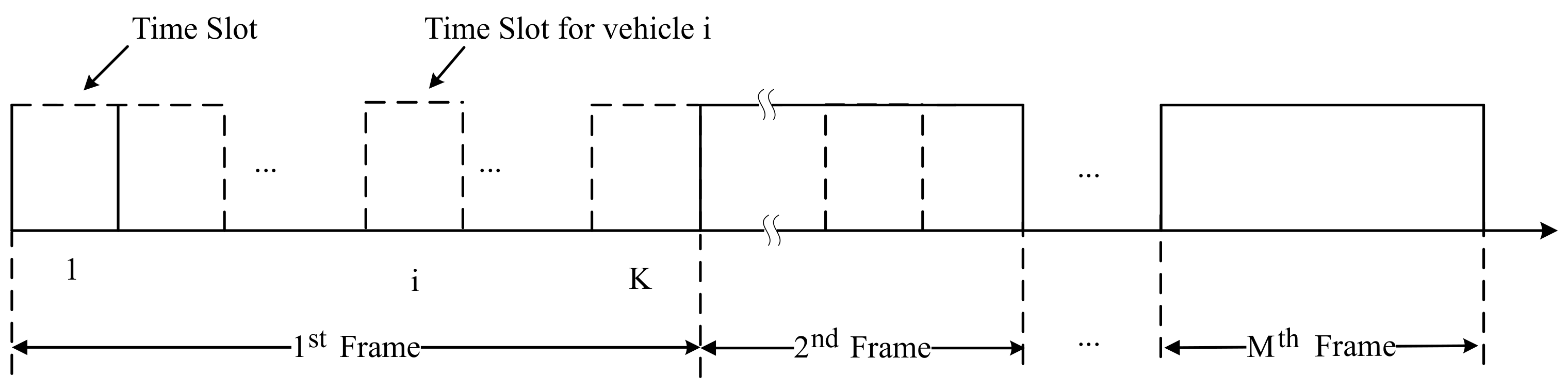
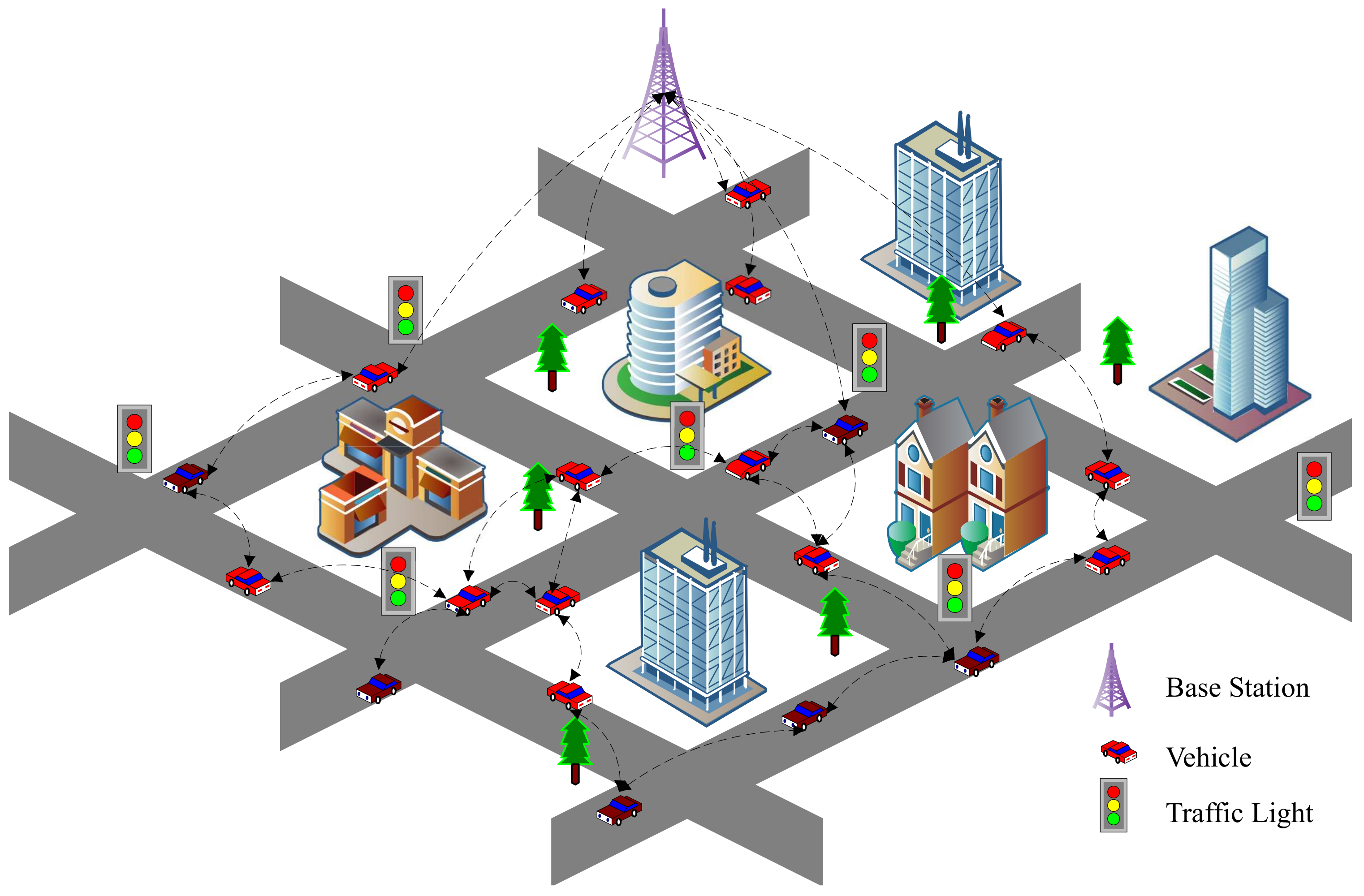
2.1. Research Scenario in VANETs and the Symbol System
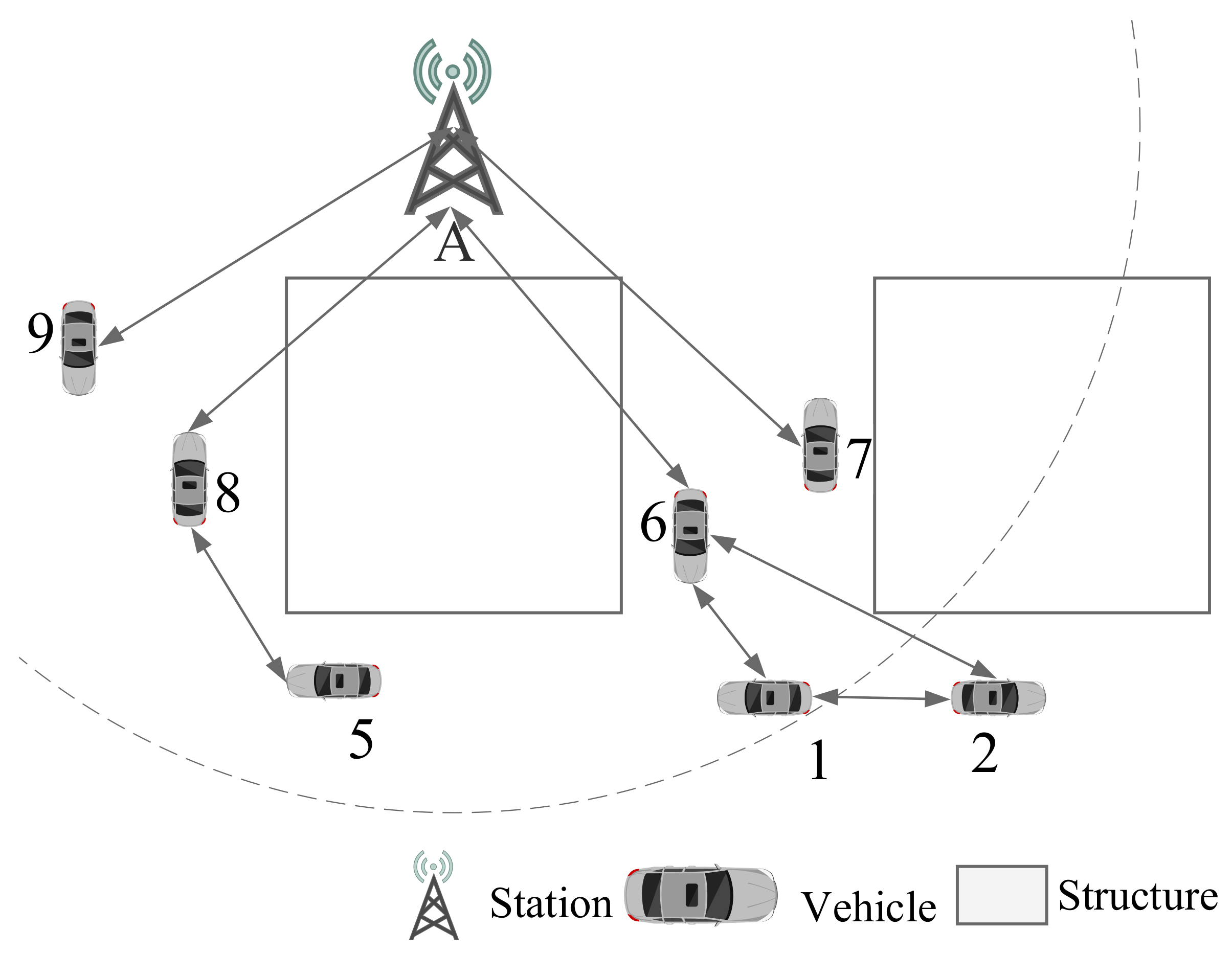
- In this scenario, both V2V and V2I communication fashion are coexisting simultaneously.
- In this scenario, the vehicle speed is relatively low and SD could be updated timely.
- Due to the buildings and other architectures, CSI amongst vehicles with base station varies a lot, which should be solved first of all.
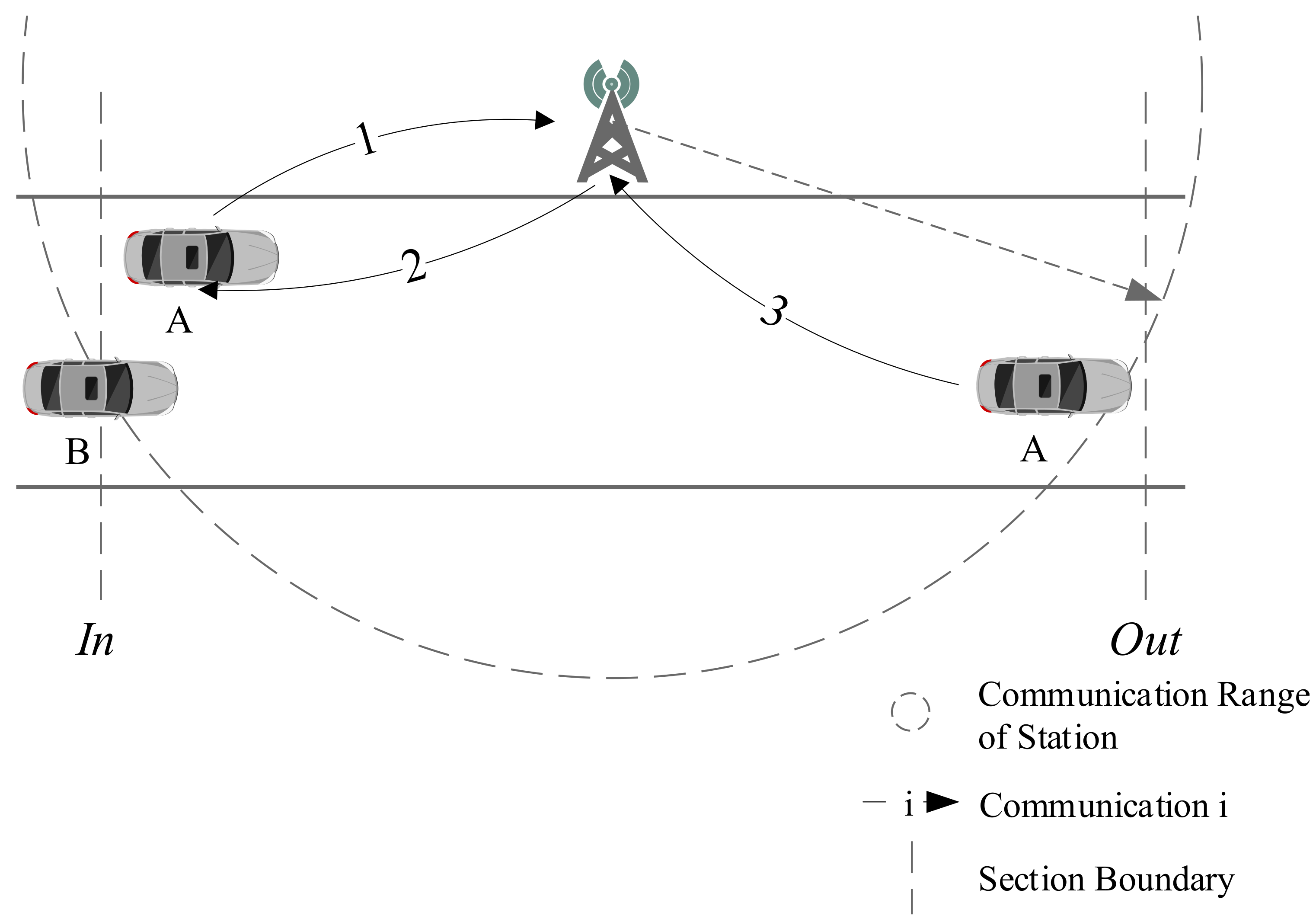
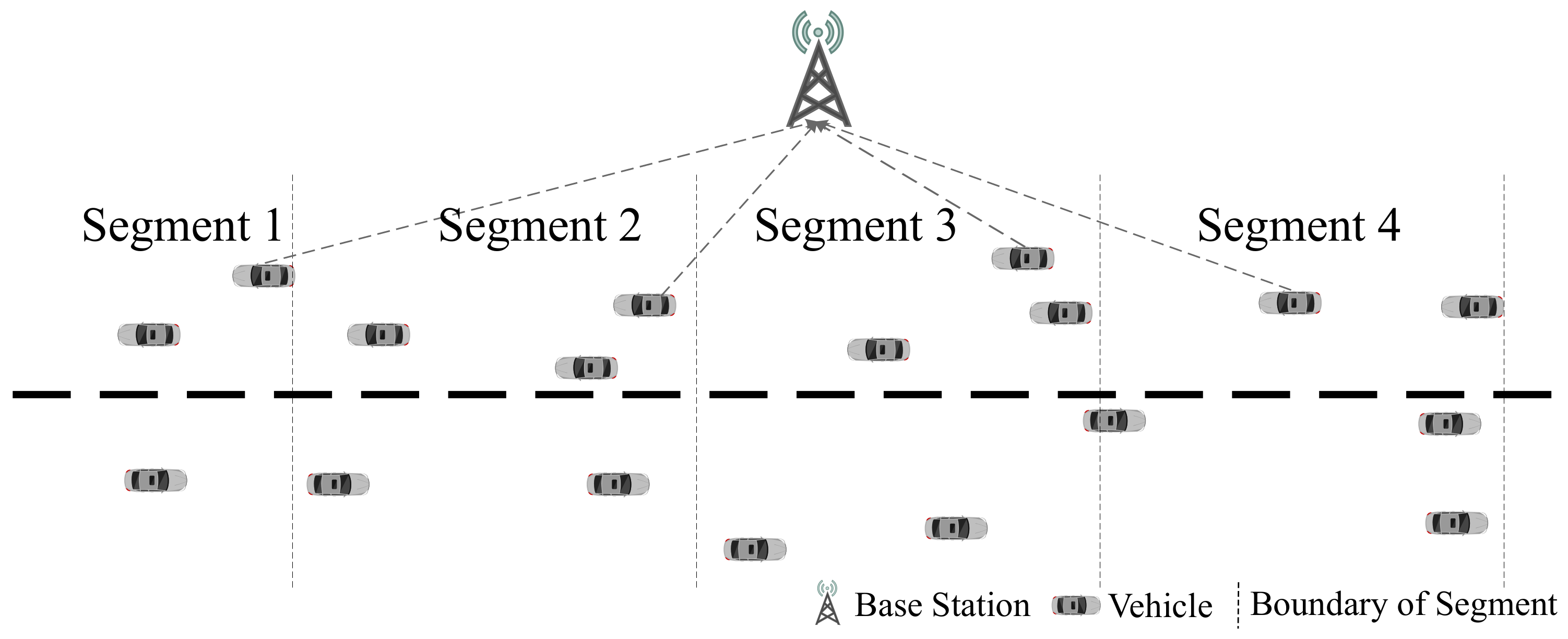
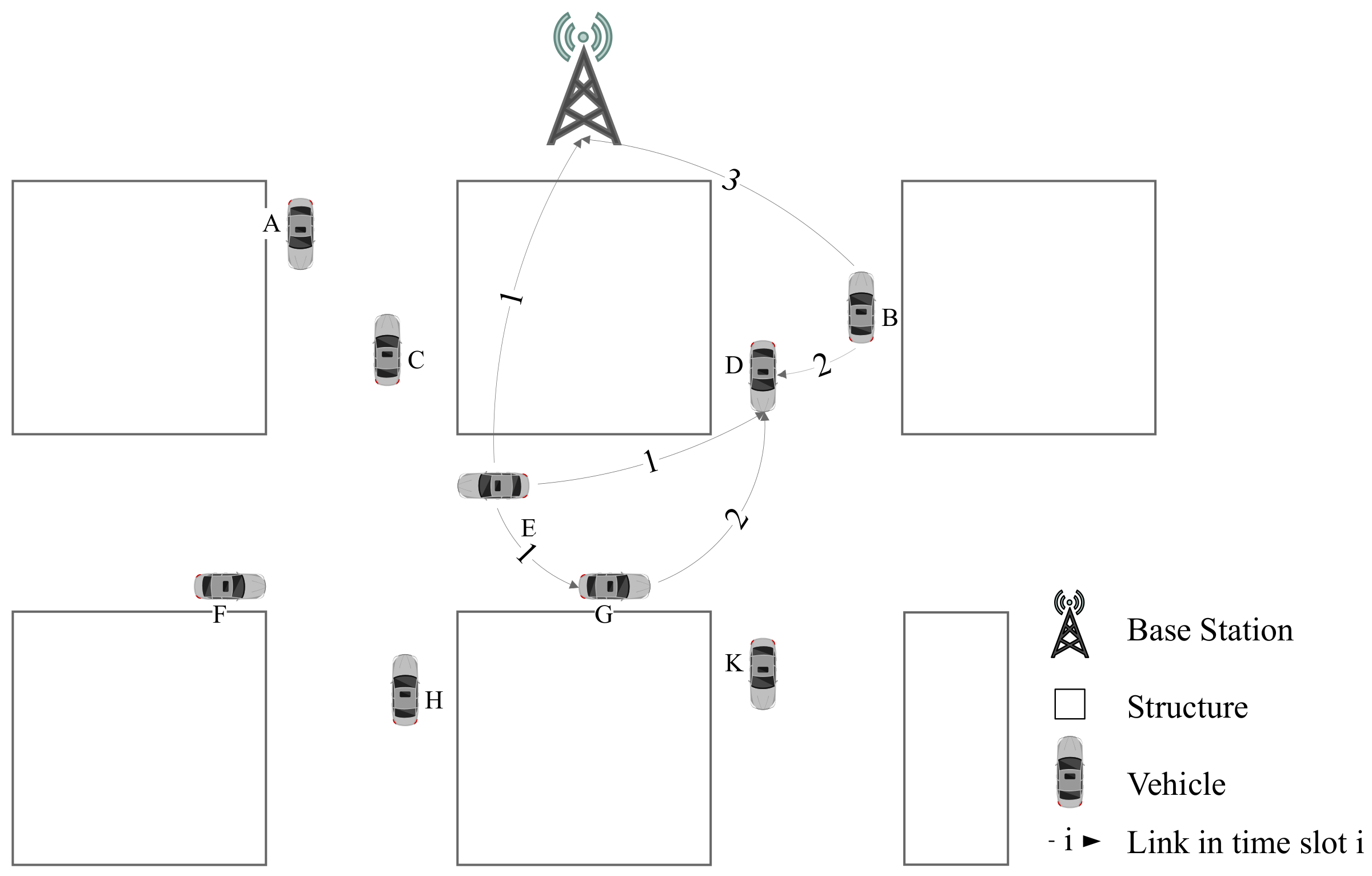
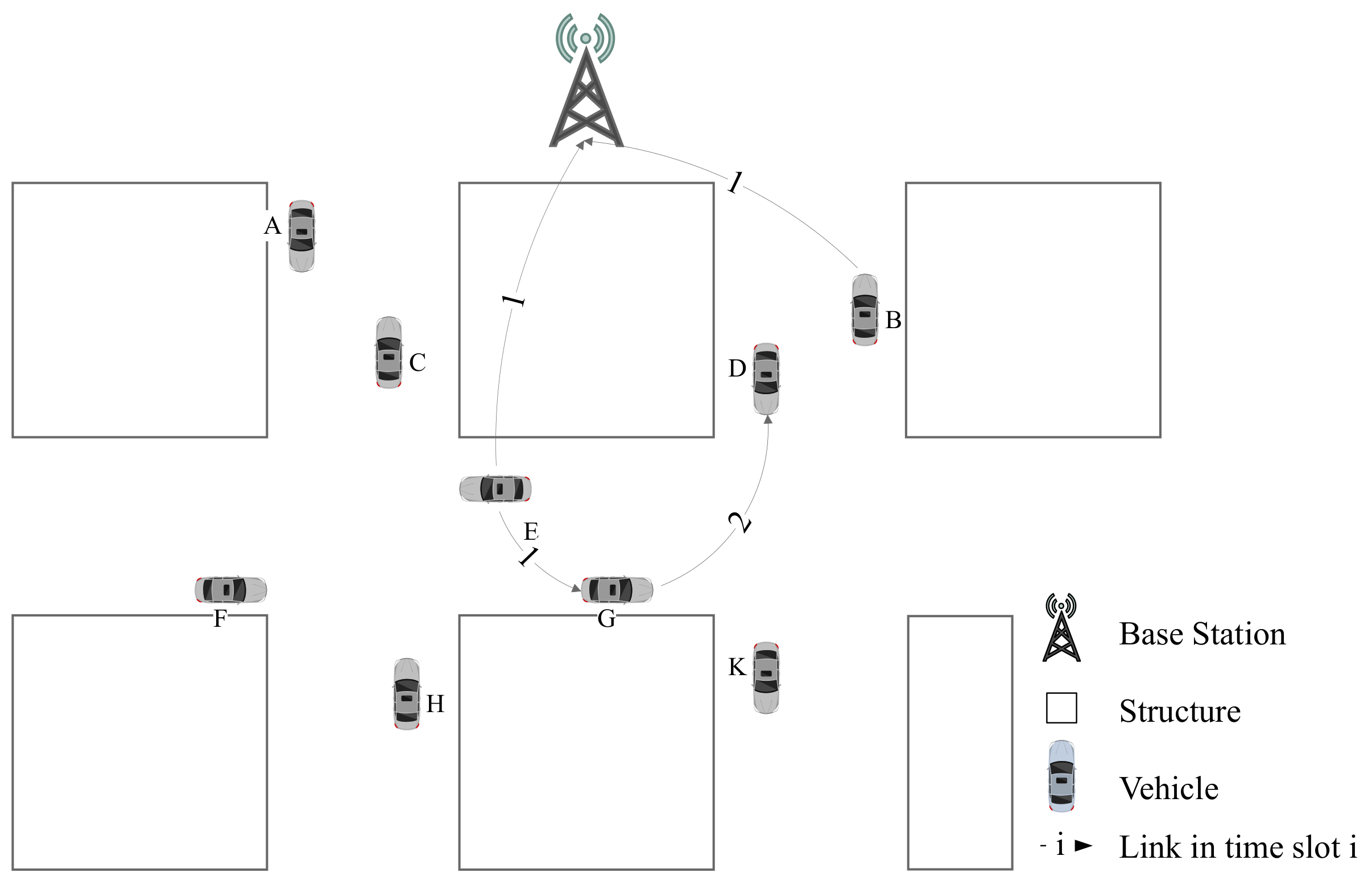
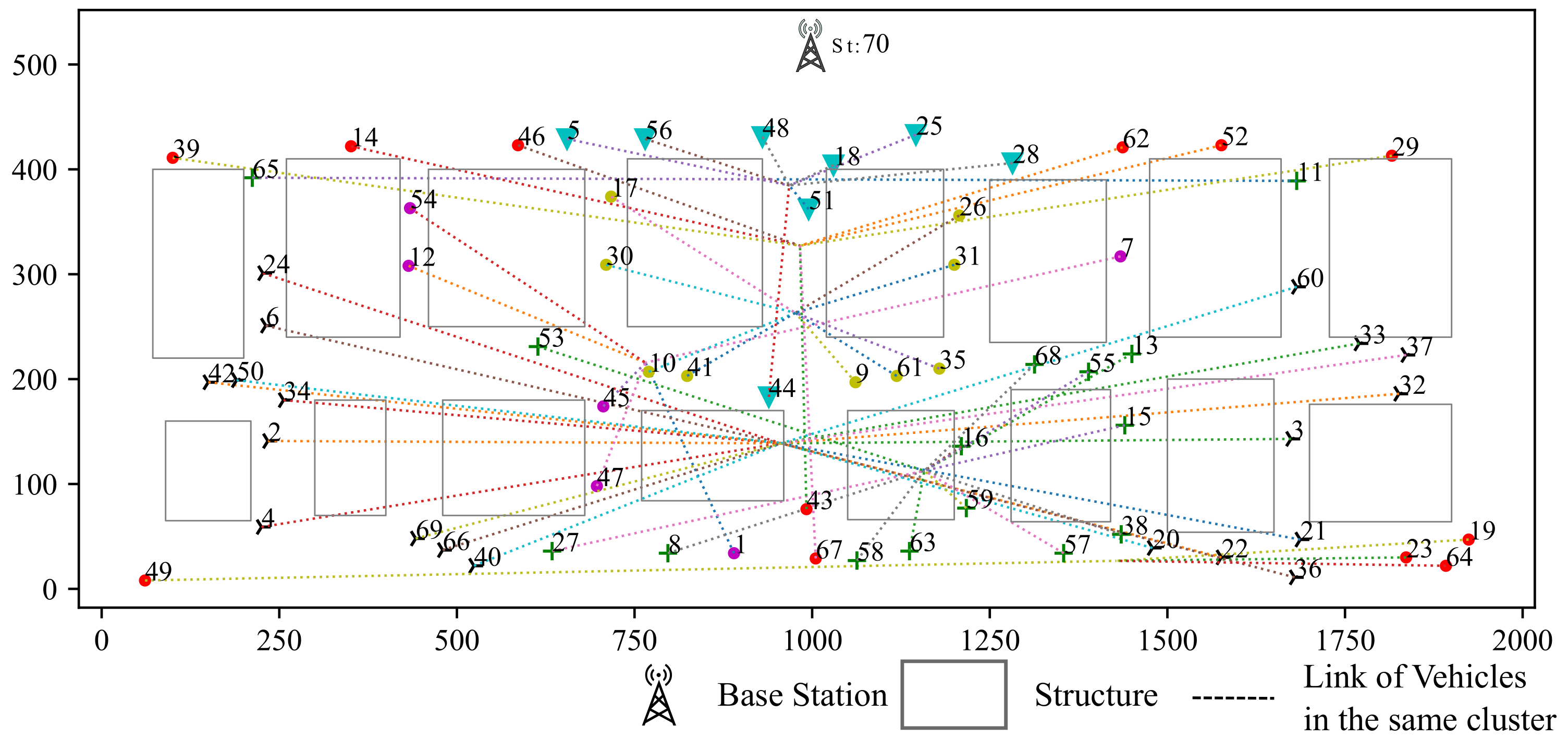
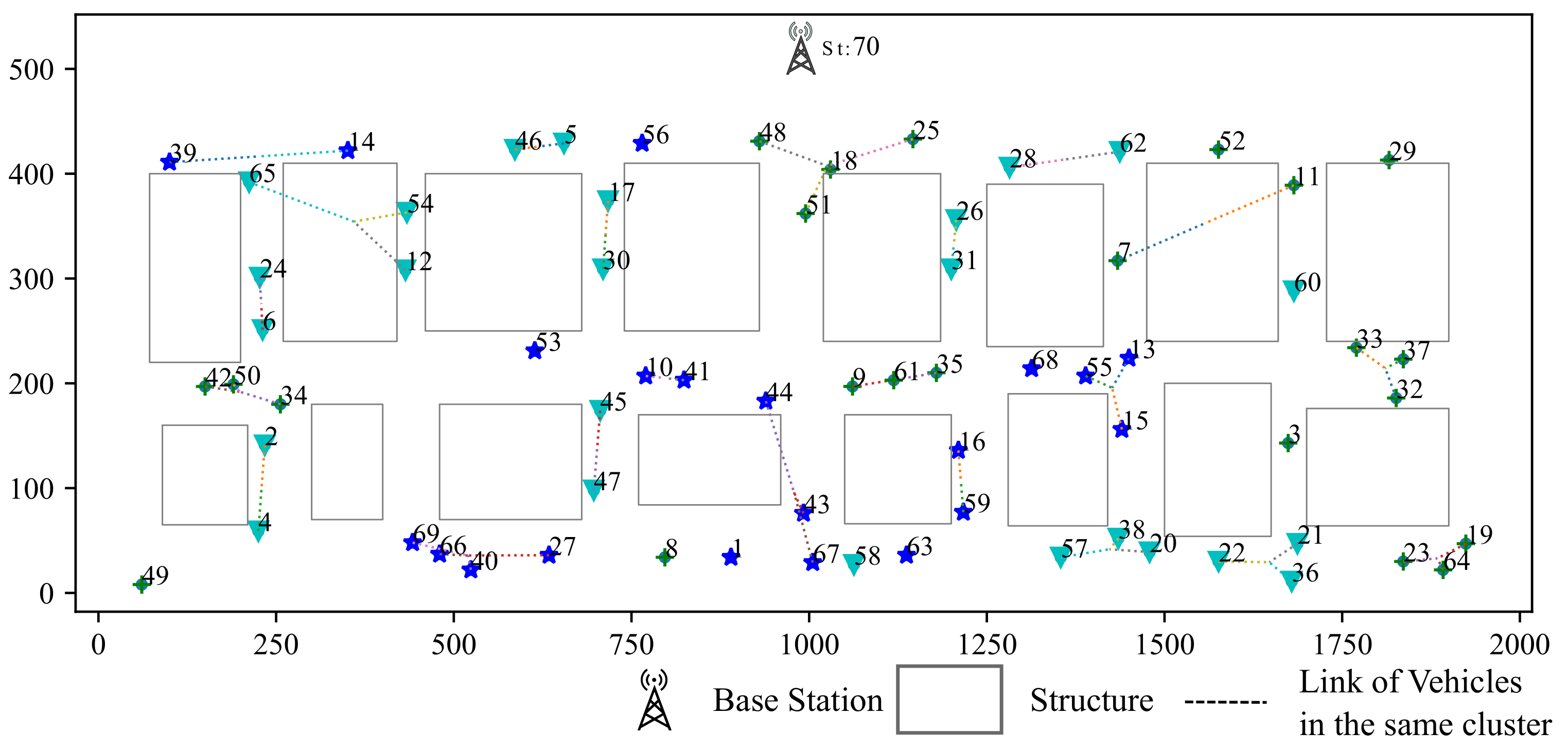
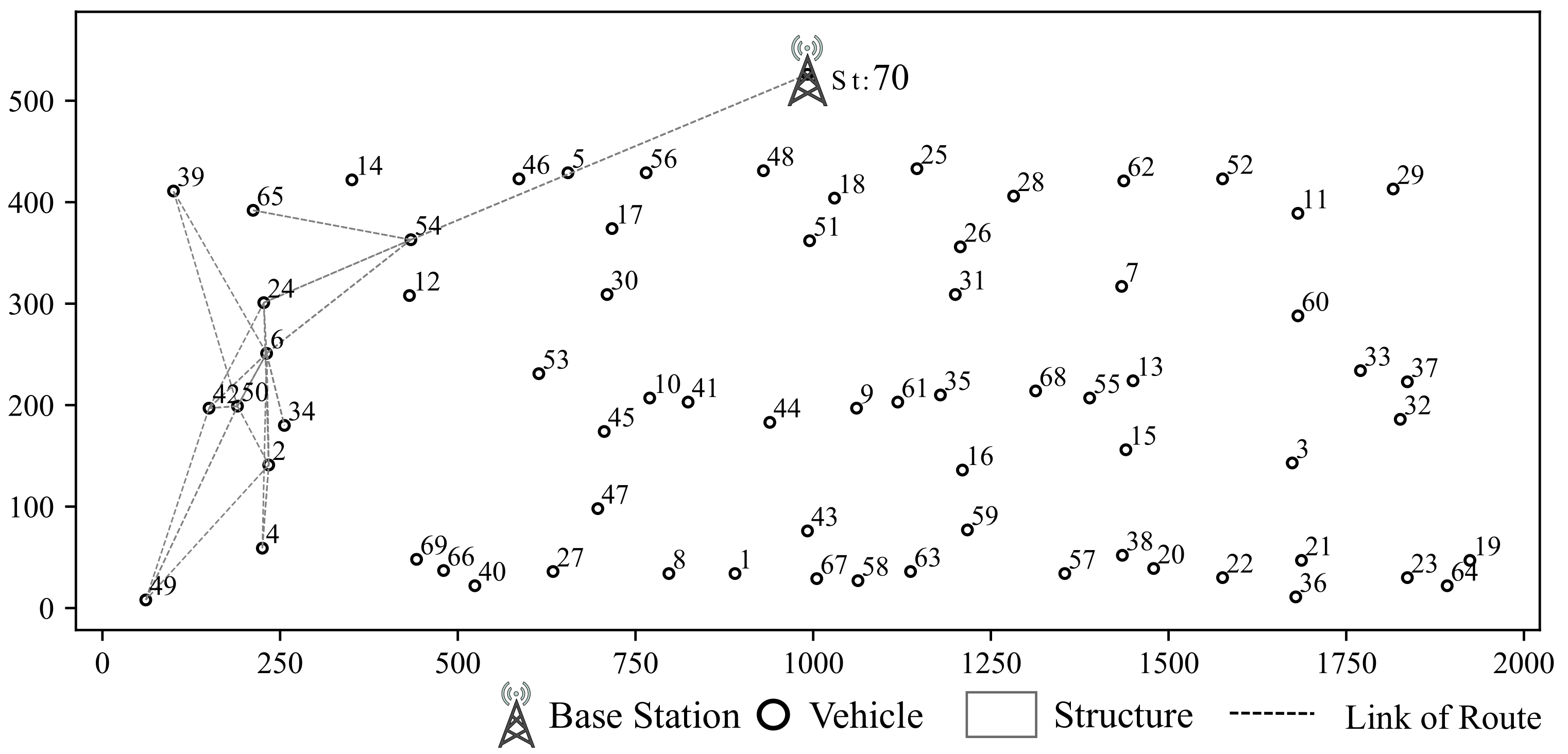
2.2. Case Study in VANETs Communication
3. Model of Broadcast Assisted Transmission Based IA Application in VANETs
3.1. V2V and V2I Broadcast Model
3.2. Model of Interference Alignment between Vehicles and Base Station
3.3. The Model of Data-Driven Assisted Transmission
3.4. Optimization Objective
| OPT: | Min | |
| –,,– |
| OPT: | Min | |
| –,,–,–,– |
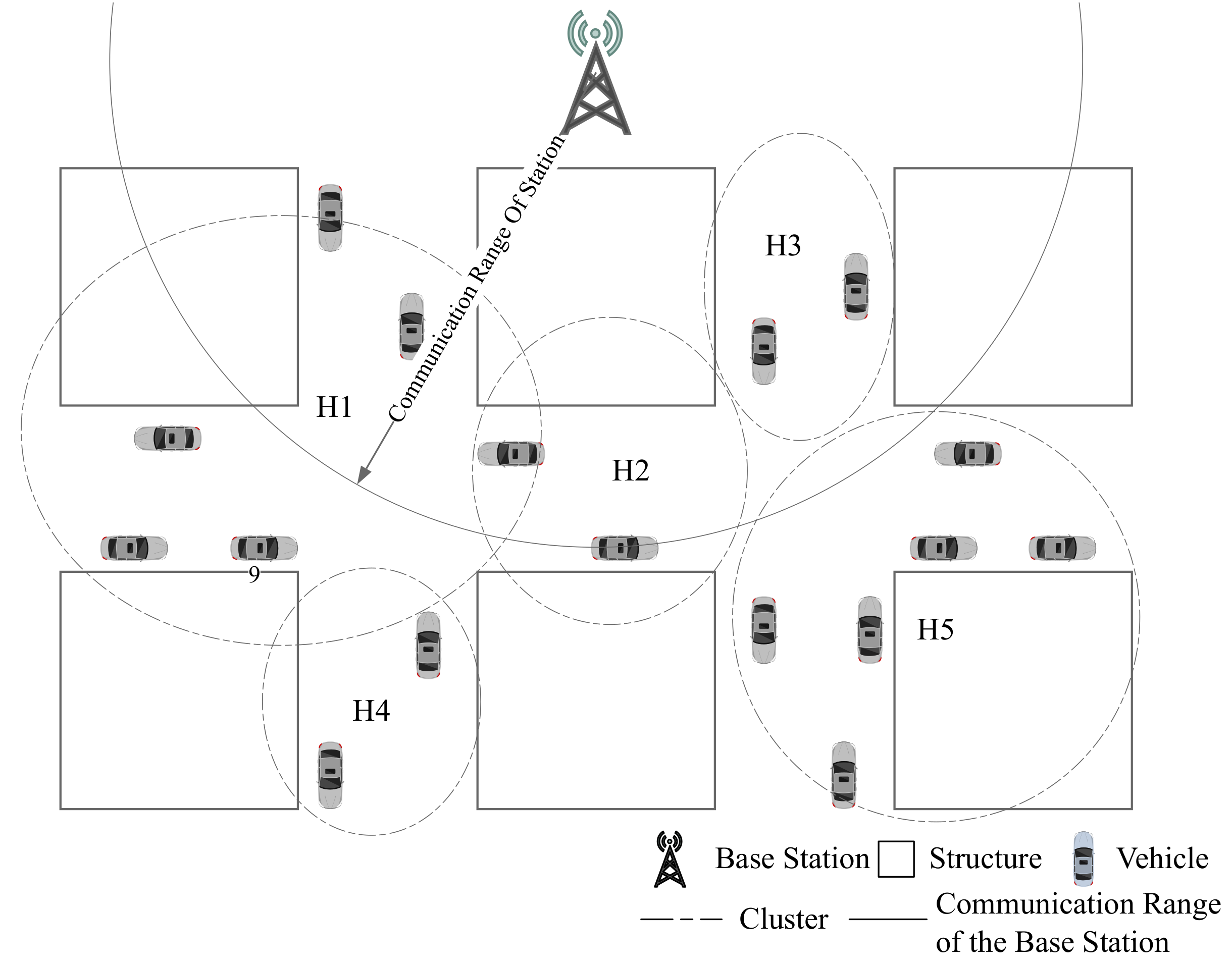
4. The -Clustering Algorithm Based on CSI in VANET
| Algorithm 1 Clustering |
|
5. Simulations
5.1. Simulation for Clustring Algorithm
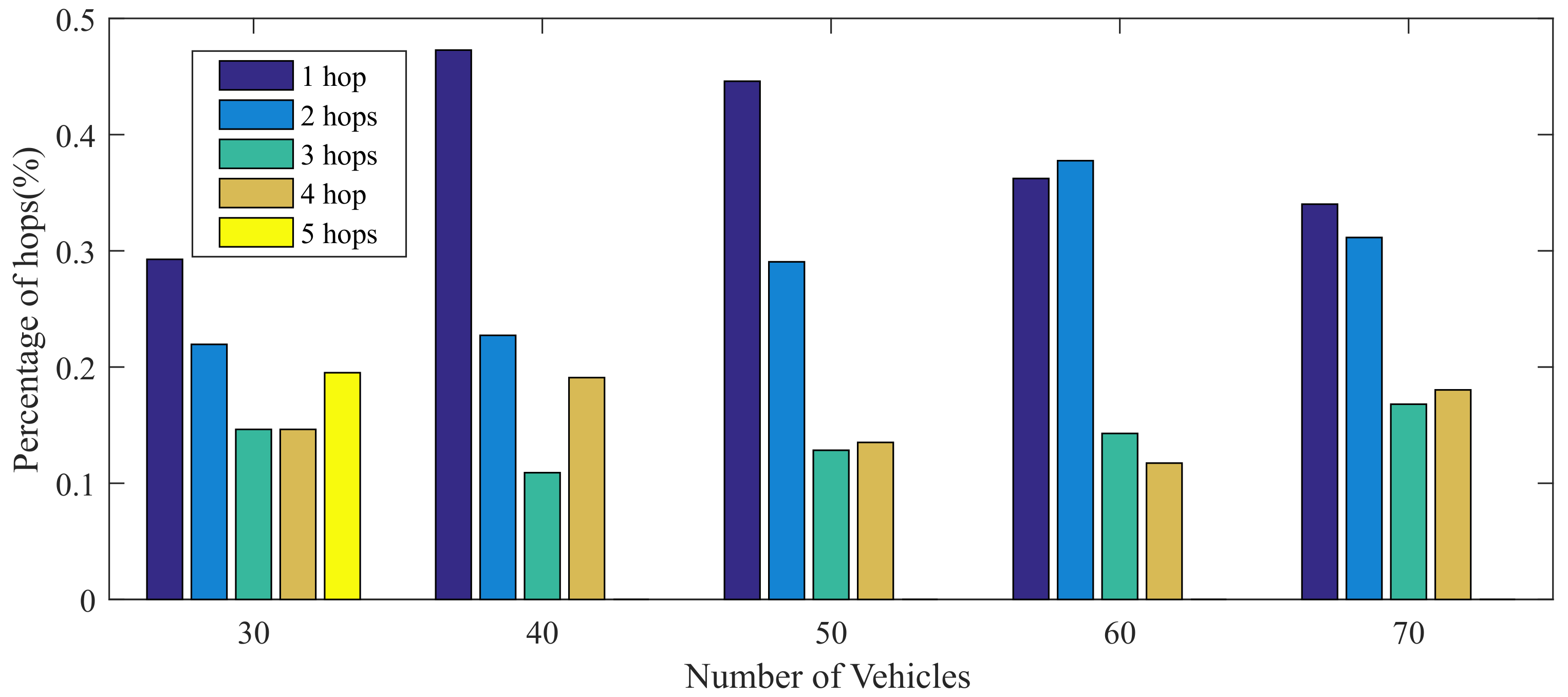
5.2. Analysis of IA Simulation
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| VANETs | Vehicular Ad-hoc NETworks |
| IA | Interference Alignment |
| V2V | Vehicle to Vehicle and Vehicle |
| V2I | Vehicle to Infrastructure |
| CSI | Channel State Information |
| CR | Cognitive Radio |
| SD | Spectrum Database |
| TDMA | Time Division Multiple Access |
| ITS | Intelligent Transportation Systems |
| MIMO | Multiple-Input Multiple-Output |
| MINLP | Mixed Integer Nonlinear Programming |
Appendix A
- (1)
- When vehicle i is in transmitting mode, we have . In the same time slot, if vehicle j is in receiving mode, we have . However, if session from vehicle i is NOT intended for j, we have . In this case, we have .
- (2)
- When vehicle i is in transmitting mode, we have . In the same time slot, if vehicle j is in receiving mode, we have . And if session from vehicle i is intended for j, we have . In this case, we have .
- (3)
- When vehicle i is in transmitting mode, we have . In the same time slot, if vehicle j is NOT in receiving mode, we have . In this case, we have . In this case, we have .
- (4)
- When vehicle i is NOT in transmitting mode, we have . In the same time slot, if vehicle j is in receiving mode, we have . In this case, we have . In this case, we have .
- (5)
- When vehicle i is NOT in transmitting mode, we have . In the same time slot, if vehicle j is in receiving mode, we have . In this case, we have . In this case, we have .
References
- Dressler, F.; Klingler, F.; Sommer, C.; Cohen, R. Not All VANET Broadcasts Are the Same: Context-Aware Class Based Broadcast. IEEE/ACM Trans. Netw. 2018, 26, 17–30. [Google Scholar] [CrossRef]
- Nguyen, V.; Oo, T.Z.; Chuan, P.; Hong, C.S. An Efficient Time Slot Acquisition on the Hybrid TDMA/CSMA Multichannel MAC in VANETs. IEEE Commun. Lett. 2016, 20, 970–973. [Google Scholar] [CrossRef]
- Limouchi, E.; Mahgoub, I. Volunteers Dilemma Game Inspired Broadcast Scheme for Vehicular Ad Hoc Networks. IEEE Trans. Intell. Transport. Syst. 2019, 1–11. [Google Scholar] [CrossRef]
- Zeng, H.; Shi, Y.; Hou, Y.T.; Lou, W.; Kompella, S.; Midkiff, S.F. An Analytical Model for Interference Alignment in Multi-Hop MIMO Networks. IEEE Trans. Mobile Comput. 2016, 15, 17–31. [Google Scholar] [CrossRef]
- Sundaresan, K.; Sivakumar, R.; Ingram, M.A.; Chang, T.Y. Medium access control in ad hoc networks with MIMO links: Optimization considerations and algorithms. IEEE Trans. Mobile Comput. 2004, 3, 350–365. [Google Scholar] [CrossRef]
- Jaiswal, R.K.; Jaidhar, C.D. Location prediction algorithm for a nonlinear vehicular movement in VANET using extended Kalman filter. Wirel. Netw. 2016, 23, 1–16. [Google Scholar] [CrossRef]
- Feteiha, M.F.; Hassanein, H.S. Enabling Cooperative Relaying VANET Clouds Over LTE-A Networks. IEEE Trans. Veh. Technol. 2015, 64, 1468–1479. [Google Scholar] [CrossRef]
- Atakan, B.; Akan, O.B. Biological Foraging-Inspired Communication in Intermittently Connected Mobile Cognitive Radio Ad Hoc Networks. IEEE Trans. Veh. Technol. 2012, 61, 2651–2658. [Google Scholar] [CrossRef]
- Al-Ali, A.K.; Sun, Y.; Di Felice, M.; Paavola, J.; Chowdhury, K.R. Accessing Spectrum Databases Using Interference Alignment in Vehicular Cognitive Radio Networks. IEEE Trans. Veh. Technol. 2015, 64, 263–272. [Google Scholar] [CrossRef]
- Ma, X.; Zhang, J.; Yin, X.; Trivedi, K.S. Design and Analysis of a Robust Broadcast Scheme for VANET Safety-Related Services. IEEE Trans. Veh. Technol. 2012, 61, 46–61. [Google Scholar] [CrossRef]
- Velmurugan, V.; Leo Manickam, J.M. A efficient and reliable communication to reduce broadcast storms in VANET protocol. Clust. Comput. 2018. [Google Scholar] [CrossRef]
- Sahn, S.; Chae, S.H. Blind Integer-Forcing Interference Alignment for Downlink Cellular Networks. IEEE Commun. Lett. 2019, 23, 306–309. [Google Scholar] [CrossRef]
- Alaa, A.M.; Ismail, M.H. Achievable Degrees of Freedom of the K-User SISO Interference Channel With Blind Interference Alignment Using Staggered Antenna Switching. IEEE Trans. Veh. Technol. 2017, 66, 2825–2829. [Google Scholar] [CrossRef]
- Johnny, M.; Aref, M.R. Blind Interference Alignment for the K -User SISO Interference Channel Using Reconfigurable Antennas. IEEE Commun. Lett. 2018, 22, 1046–1049. [Google Scholar] [CrossRef]
- Guo, Q.; Liu, S.P.; Xiong, W.; Zhou, Z.Y. A Ground Target Positioning Method Facing Small UAVs. Key Eng. Mater. 2012, 503, 272–276. [Google Scholar] [CrossRef]
- Liang, W.; Zhang, Z.; Jian, D.; Wu, Y. Frequency-Domain Inter-Group Interference Coordination for V2V Communications. IEEE Signal Process. Lett. 2017, 24, 1739–1743. [Google Scholar]
- Cheng, N.; Zhang, N.; Lu, N.; Shen, X.; Mark, J.W.; Liu, F. Opportunistic Spectrum Access for CR-VANETs: A Game-Theoretic Approach. IEEE Trans. Veh. Technol. 2014, 63, 237–251. [Google Scholar] [CrossRef]
- Deepak, G.C.; Navaie, K.; Ni, Q. Radio Resource Allocation in Collaborative Cognitive Radio Networks Based on Primary Sensing Profile. IEEE Access 2018, 6, 50344–50357. [Google Scholar] [CrossRef]
- Han, Y.; Ekici, E.; Kremo, H.; Altintas, O. Throughput-Efficient Channel Allocation Algorithms in Multi-Channel Cognitive Vehicular Networks. IEEE Trans. Wirel. Commun. 2017, 16, 757–770. [Google Scholar] [CrossRef]
- Omar, H.A.; Zhuang, W.; Li, L. VeMAC: A TDMA-Based MAC Protocol for Reliable Broadcast in VANETs. IEEE Trans. Mobile Comput. 2013, 12, 1724–1736. [Google Scholar] [CrossRef]
- Cao, S.; Lee, V.C.S. A Novel Adaptive TDMA-Based MAC Protocol for VANETs. IEEE Commun. Lett. 2018, 22, 614–617. [Google Scholar] [CrossRef]
- Arthur, D.; Vassilvitskii, S. K-Means++: The Advantages of Careful Seeding. In Proceedings of the Eighteenth ACM-SIAM Symposium on Discrete Algorithms, New Orleans, LA, USA, 7–9 January 2007. [Google Scholar]
- Virdaus, I.K.; Kang, M.; Shin, S.; Lee, C.G.; Pyim, J. A Counting-Based Broadcast Model of Emergency Message Dissemination in VANETs. In Proceedings of the 2017 Ninth International Conference on Ubiquitous and Future Networks (ICUFN), Milan, Italy, 4–7 July 2017; pp. 927–930. [Google Scholar] [CrossRef]
- Abbasi, H.I.; Voicu, R.C.; Copeland, J.; Chang, Y. Towards Fast and Reliable Multi-hop Routing in VANETs. IEEE Trans. Mobile Comput. 2019. [Google Scholar] [CrossRef]
- Tahmasbi-Sarvestani, A.; Fallah, Y.P.; Kulathumani, V. Network-Aware Double-Layer Distance-Dependent Broadcast Protocol for VANETs. IEEE Trans. Veh. Technol. 2015, 64, 5536–5546. [Google Scholar] [CrossRef]
- Gurobi Optimization, Inc. Gurobi Optimizer Reference Manual. 2018. Available online: http://www.gurobi.com (accessed on 1 November 2019).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Remark |
|---|---|
| N | Number of terminals in network including vehicles and base station |
| F | Number of communication times |
| ID of Base station | |
| Set of sources | |
| Set of destinations | |
| Set of Scheduling time slots | |
| K | Number of time slots |
| Number of antennas equipped on terminal i | |
| Symbol of interference status between i and j (0 means j is out of interference range of i) | |
| Symbol of connectivity between i and j (0 means j is out of communicate range of i) | |
| Set of vehicles in cluster i | |
| Number of communication session vehicle i sends to vehicle j during the same time slot t | |
| Number of interference caused by i to j during time slot t | |
| Number of interference caused by i to j which could be aligned during time slot t | |
| Sending state of vehicle i at time slot t (0 means that vehicle i is not broadcasting during time slot t) | |
| Receiving state of vehicle i at time slot t (0 means that vehicle i is not receiving during time slot t) | |
| Threshold value of max hops | |
| Integer value indicates whether vehicle i relays data to j for session f (1 means that i and j take part in relaying for session f ) | |
| Integer value indicates whether time slot t is assigned to any vehicles (0 means that there is no vehicle sends data during time slot t, 1 means that at least one vehicle sends data to others) | |
| Proportion of the time slots allocated |
| SRC | DES 1 | DES 2 | DES 3 | DES 4 | DES 5 |
|---|---|---|---|---|---|
| 65 | 24 | 70 | |||
| 24 | 6 | 65 | 70 | ||
| 6 | 24 | 34 | 42 | 50 | 70 |
| 50 | 2 | 6 | 34 | 42 | 70 |
| 42 | 6 | 50 | 70 | ||
| 37 | 32 | 33 | 70 | ||
| 2 | 4 | 34 | 50 | 70 | |
| 4 | 2 | 70 |
| SRC | DES | ROUTE | SRC | DES | ROUTE |
|---|---|---|---|---|---|
| 65 | 24 | 54 | 50 | 34 | 6 |
| 24 | 6 | 2 | 50 | 42 | |
| 24 | 65 | 54 | 42 | 6 | |
| 6 | 24 | 42 | 50 | 49 | |
| 6 | 34 | 2 | 4 | 6 | |
| 6 | 42 | 50 | 2 | 34 | 6 |
| 6 | 50 | 39 | 2 | 50 | 49 |
| 50 | 2 | 4 | |||
| 50 | 6 |
| Number of Hops | 1 | 2 | 3 | 4 | 5 | |
|---|---|---|---|---|---|---|
| Number of Vehicle | ||||||
| 30 | 24 | 18 | 12 | 12 | 16 | |
| 40 | 52 | 25 | 12 | 21 | 0 | |
| 50 | 66 | 43 | 19 | 20 | 0 | |
| 60 | 71 | 74 | 28 | 23 | 0 | |
| 70 | 83 | 76 | 41 | 44 | 0 | |
| Number of Vehicles | Number of all Sessions | Count of Participation of Base Station | Percentage |
|---|---|---|---|
| 30 | 82 | 5 | 0.06 |
| 40 | 110 | 14 | 0.13 |
| 50 | 148 | 21 | 0.14 |
| 60 | 196 | 45 | 0.23 |
| 70 | 244 | 50 | 0.20 |
| Src | Des | Routes | Src | Des | Routes |
|---|---|---|---|---|---|
| 70 | 65 | 54 | 70 | 14 | 54, 6 |
| 70 | 24 | 54 | 70 | 50 | 54, 6 |
| 70 | 6 | 54 | 70 | 4 | 54, 6 |
| 70 | 39 | 54, 6 | 70 | 34 | 54, 6 |
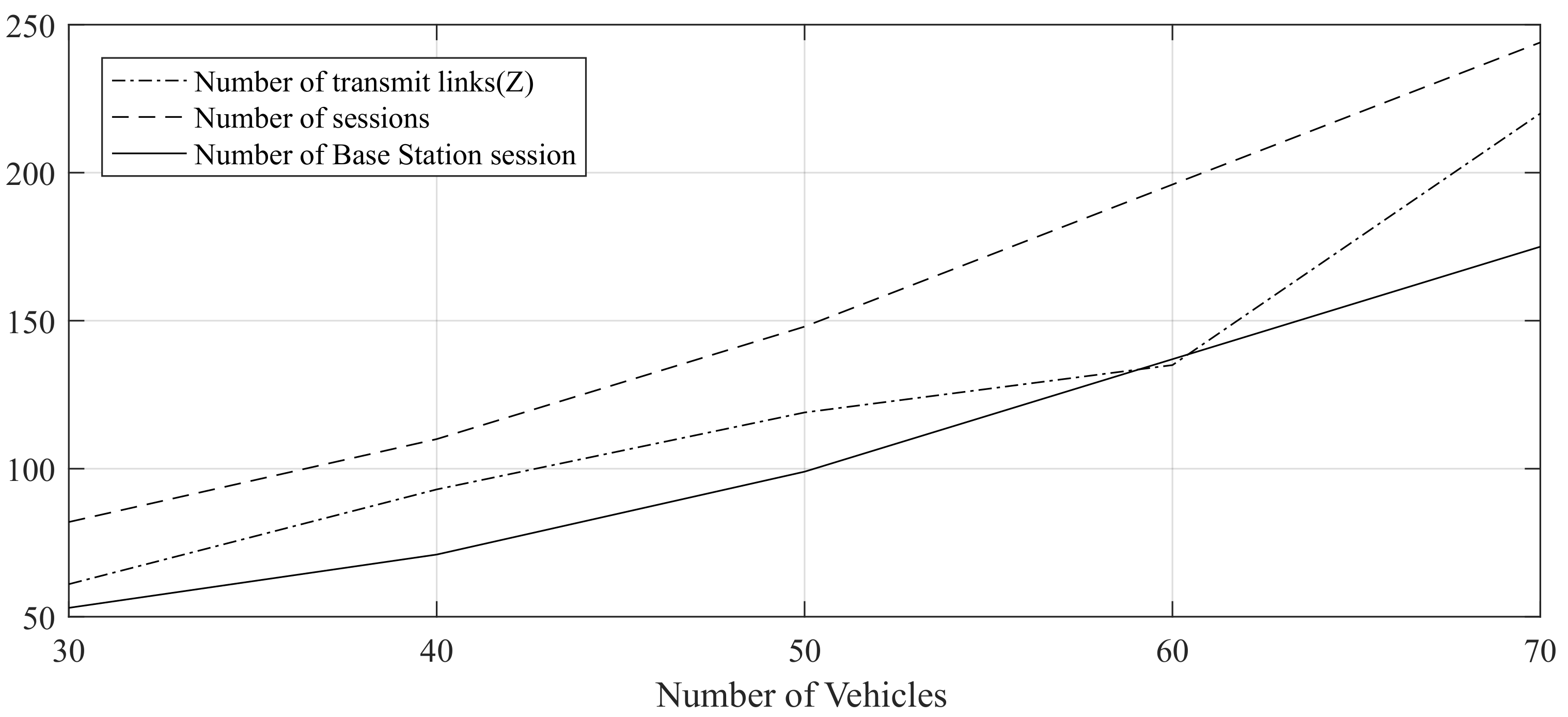
| Number of Vehicles | Number of Transmit Links (Z) | Number of Sessions | Number of Base Station Session |
|---|---|---|---|
| 30 | 61 | 82 | 53 |
| 40 | 93 | 110 | 71 |
| 50 | 119 | 148 | 99 |
| 60 | 135 | 196 | 137 |
| 70 | 220 | 244 | 175 |
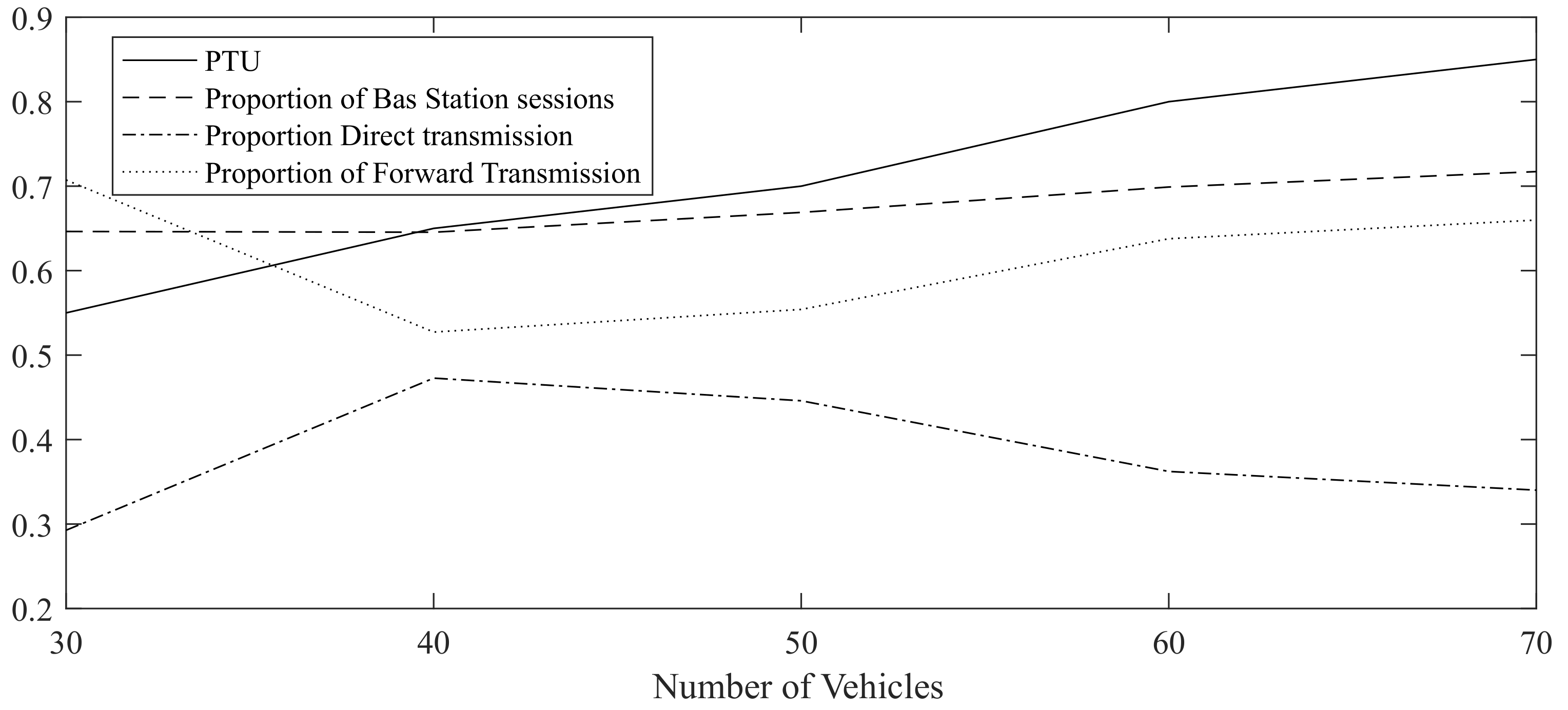
| Number of Vehicles | Proportion of Base Station Session | Ratio of Transmit Links to Sessions | PTU | PTU without IA |
|---|---|---|---|---|
| 30 | 0.65 | 0.74 | 0.55 | 0.65 |
| 40 | 0.65 | 0.85 | 0.65 | 0.76 |
| 50 | 0.67 | 0.80 | 0.70 | 0.88 |
| 60 | 0.70 | 0.69 | 0.80 | 0.93 |
| 70 | 0.72 | 0.90 | 0.85 | 0.98 |
| Number of Vehicles | Proportion Direct Transmission | Proportion of Forward Transmission |
|---|---|---|
| 30 | 0.30 | 0.71 |
| 40 | 0.47 | 0.53 |
| 50 | 0.45 | 0.55 |
| 60 | 0.36 | 0.64 |
| 70 | 0.34 | 0.66 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, C.; Han, J.; Ding, X.; Shi, L.; Yang, F. An Analytical Model for Interference Alignment in Broadcast Assisted VANETs. Sensors 2019, 19, 4988. https://doi.org/10.3390/s19224988
Zhao C, Han J, Ding X, Shi L, Yang F. An Analytical Model for Interference Alignment in Broadcast Assisted VANETs. Sensors. 2019; 19(22):4988. https://doi.org/10.3390/s19224988
Chicago/Turabian StyleZhao, Chong, Jianghong Han, Xu Ding, Lei Shi, and Fan Yang. 2019. "An Analytical Model for Interference Alignment in Broadcast Assisted VANETs" Sensors 19, no. 22: 4988. https://doi.org/10.3390/s19224988
APA StyleZhao, C., Han, J., Ding, X., Shi, L., & Yang, F. (2019). An Analytical Model for Interference Alignment in Broadcast Assisted VANETs. Sensors, 19(22), 4988. https://doi.org/10.3390/s19224988