A Depth-Adaptive Waveform Decomposition Method for Airborne LiDAR Bathymetry

 ,
,
Abstract
:1. Introduction
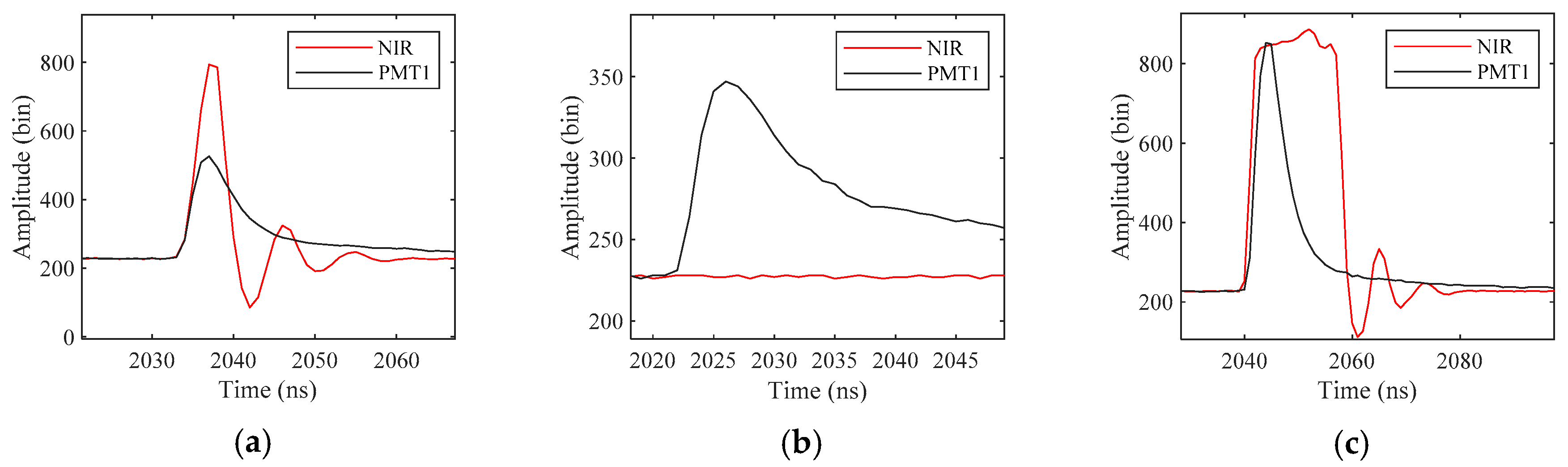
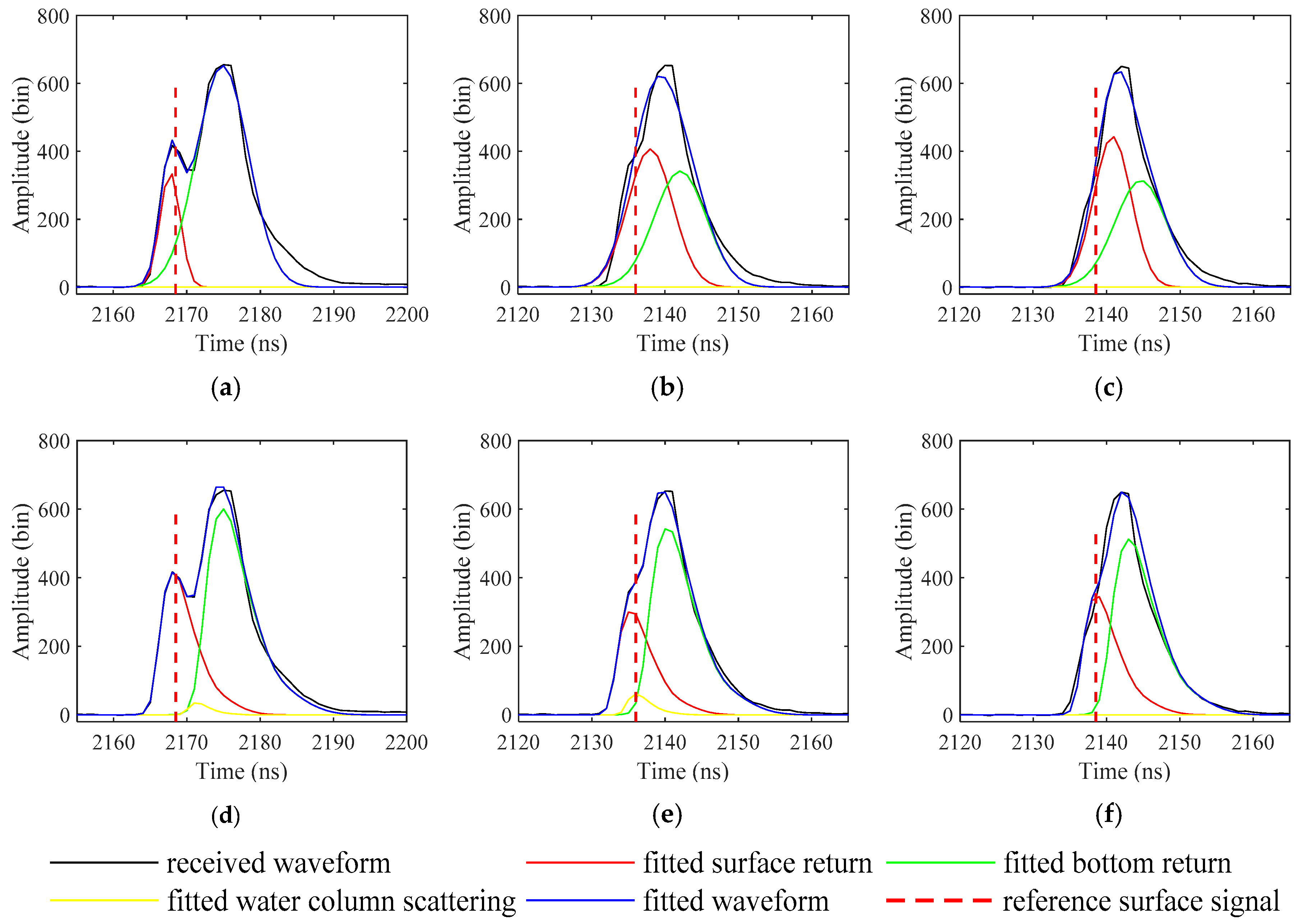
- Mixed peaks in surface return: The waveforms are the convolution of the emitted pulse and the target cross section, and are digitized by the receiver. The limited full width at half maximum (FWHM) of the emitted pulse and sampling rate in the LiDAR digitizer induce the peak stretching, leading to a mixed peak of surface return and water column scattering. Especially when the water is extremely shallow, the bottom return will also be included in the mixed peak. Taking the mixed peak as the surface return may introduce errors ranging from 10 cm to 25 cm [9].
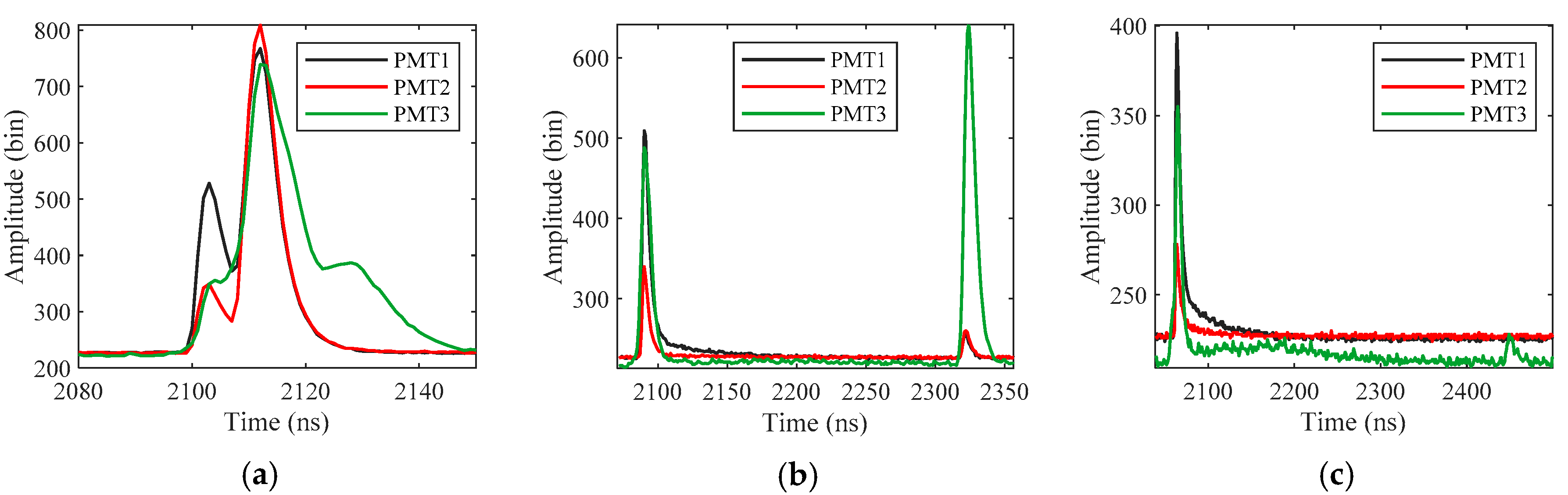
- Weak bottom return in deep or turbid water: The pulse energy decreases exponentially with depth in the water column, and the decrease rate is positively associated with water turbidity, resulting in a rather weak bottom return in deep or turbid water [10].
2. Materials and Methods
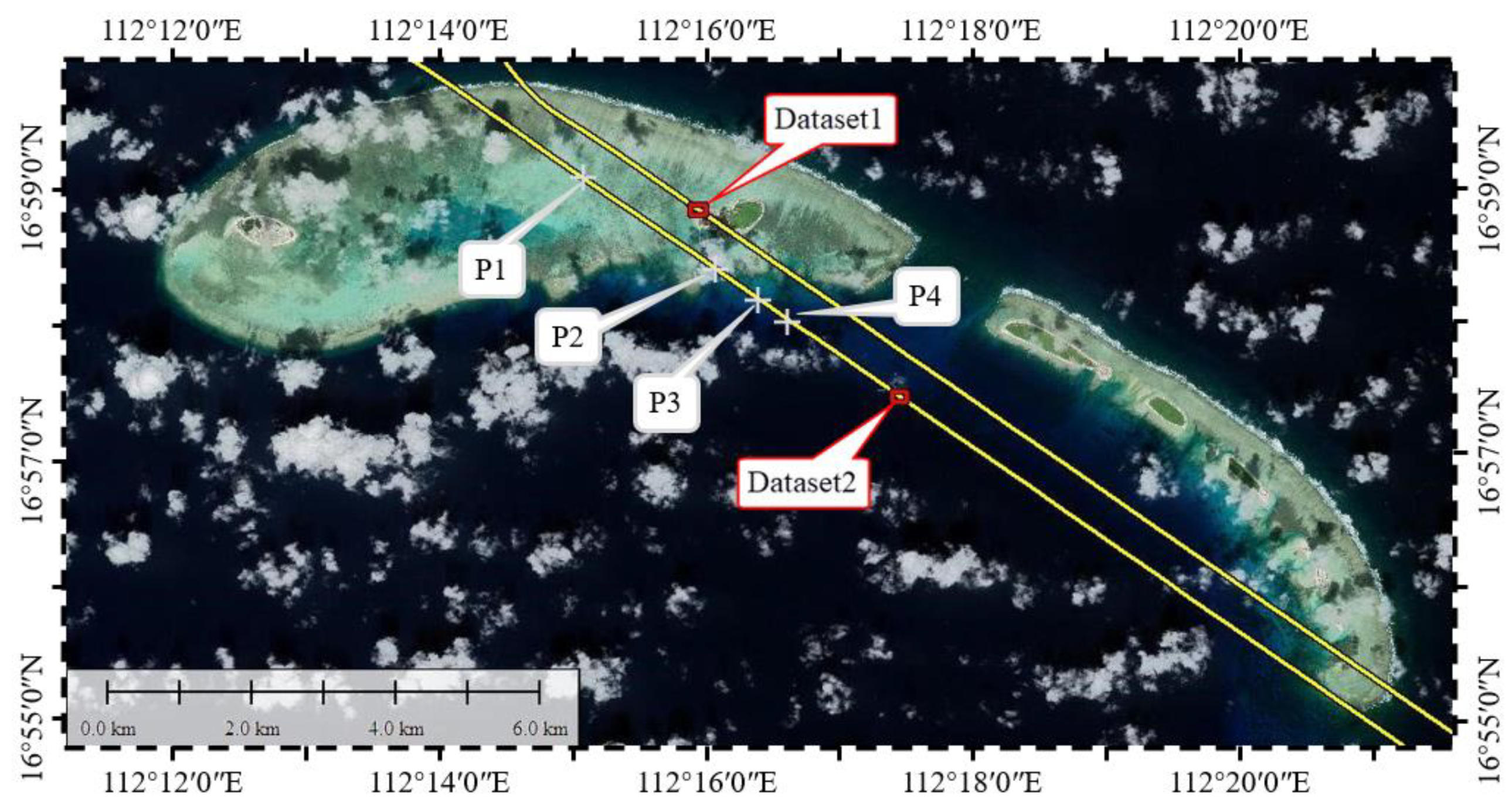
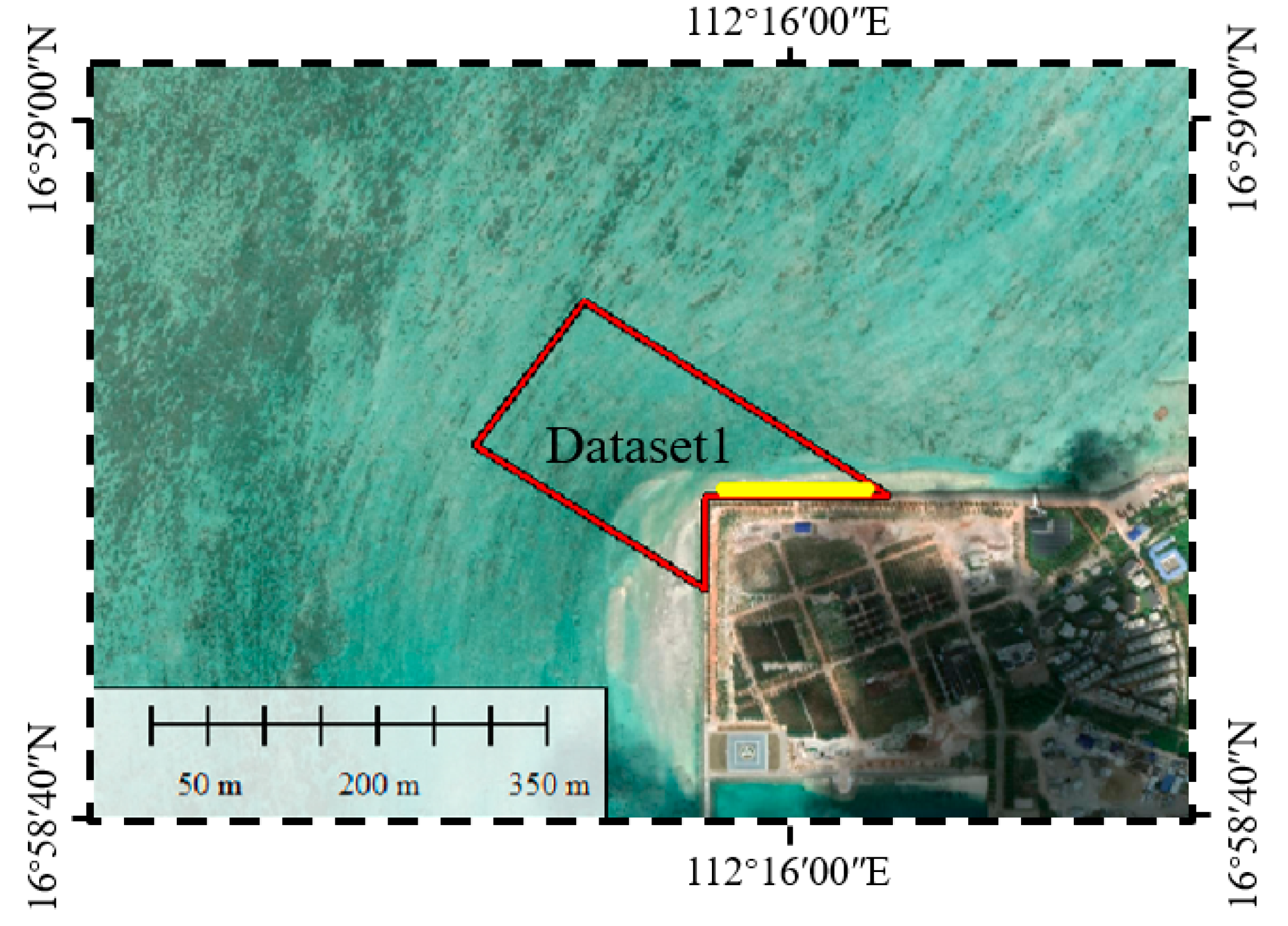
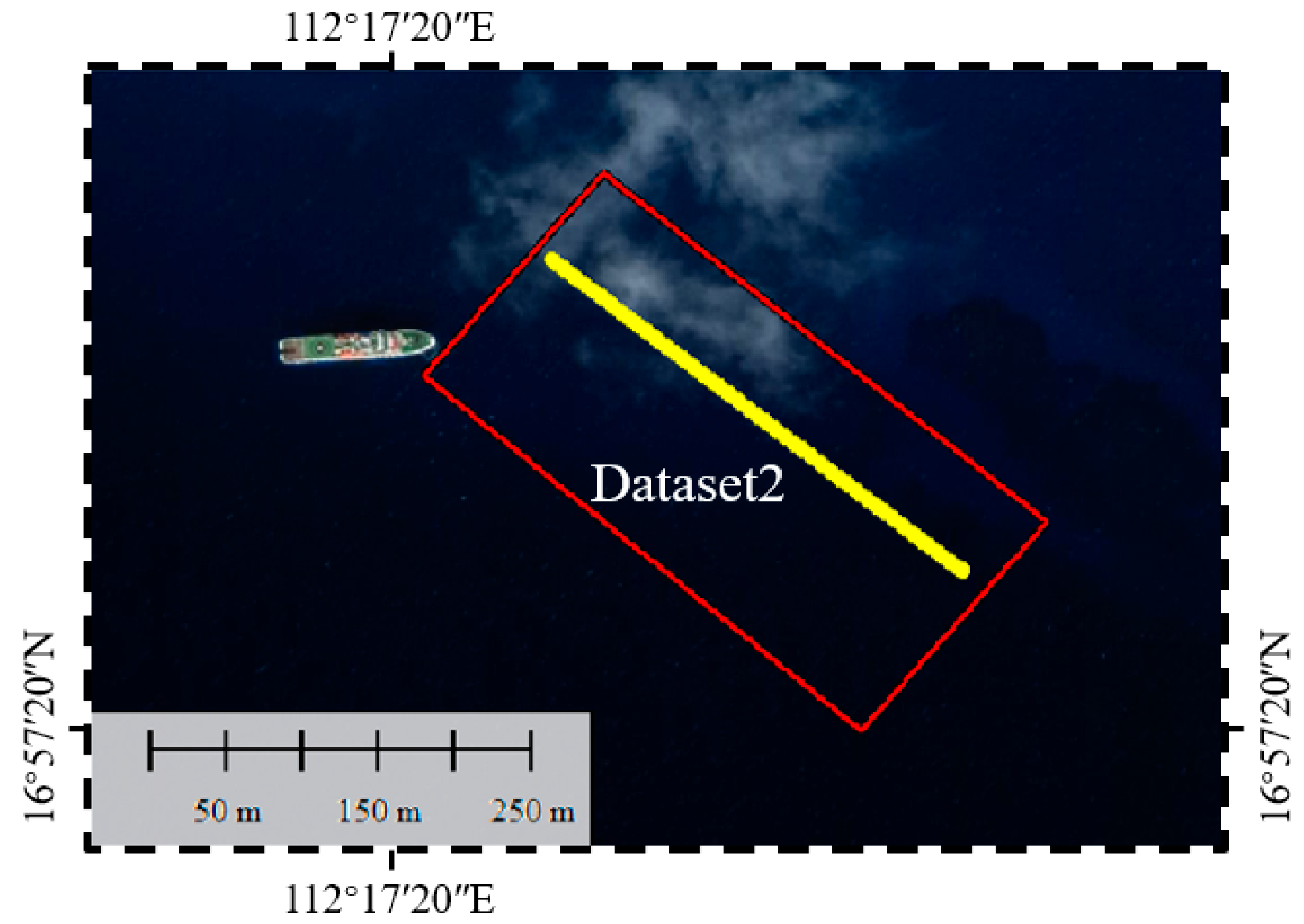
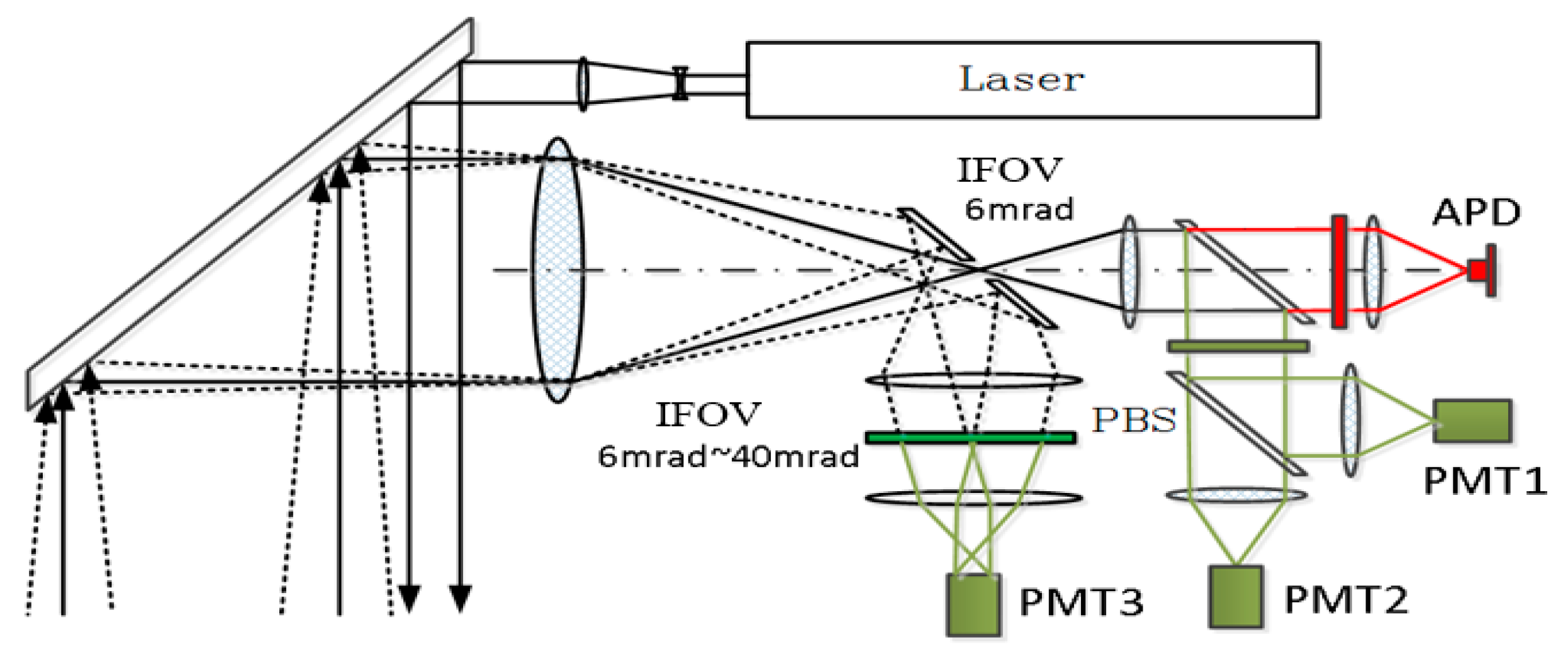
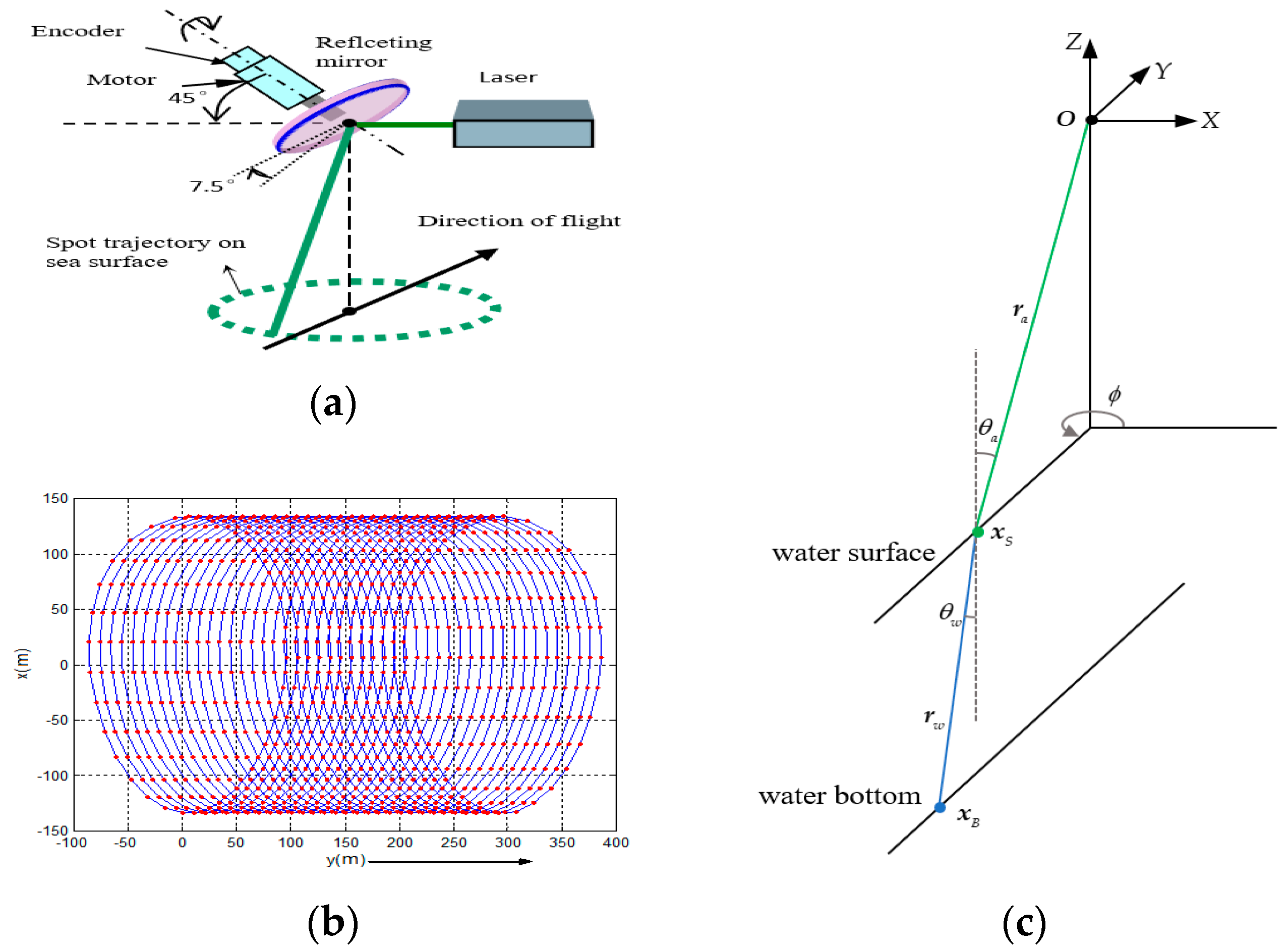
2.1. The Mapper5000 System and Study Area
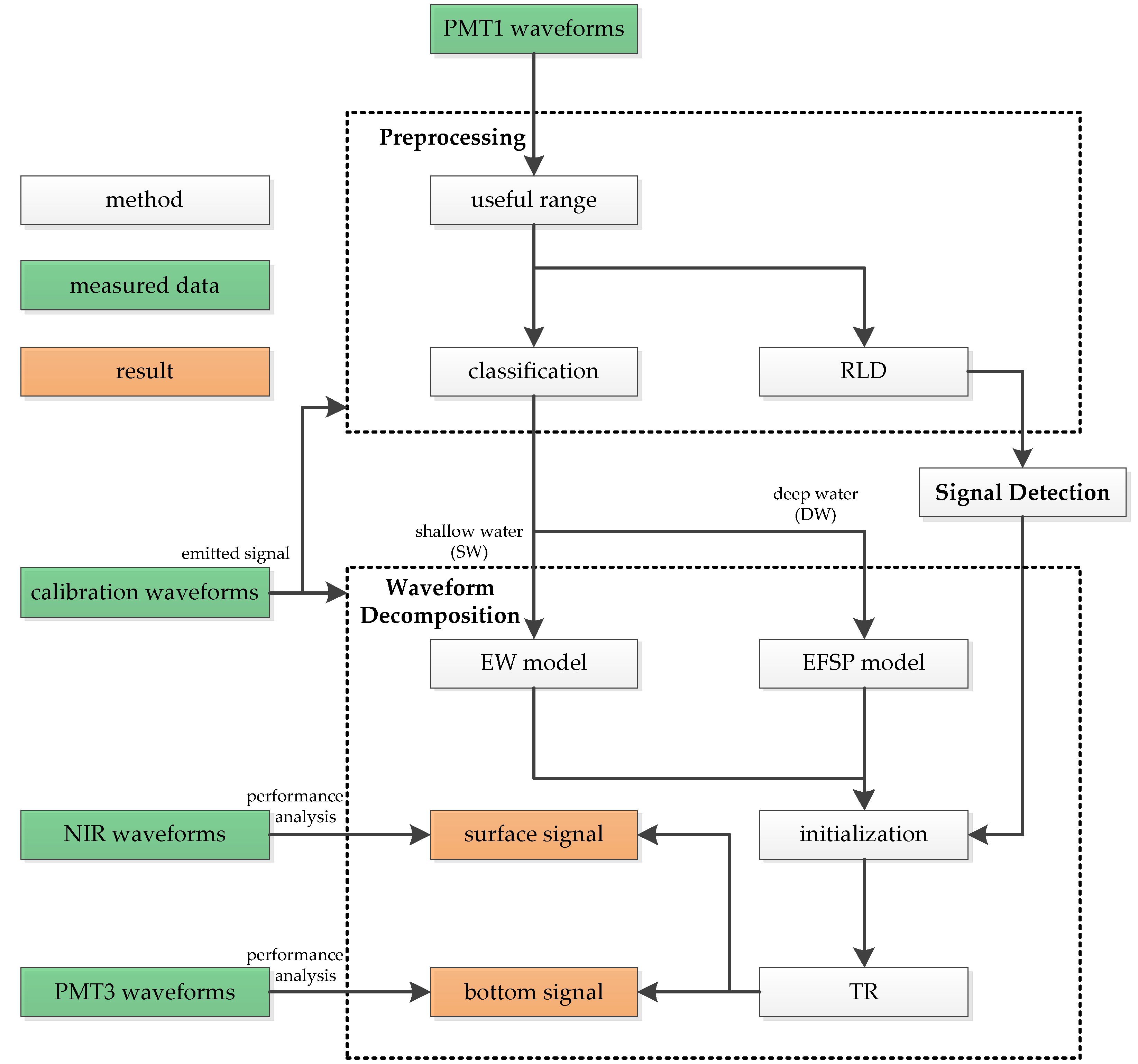
2.2. Workflow
2.3. Preprocessing
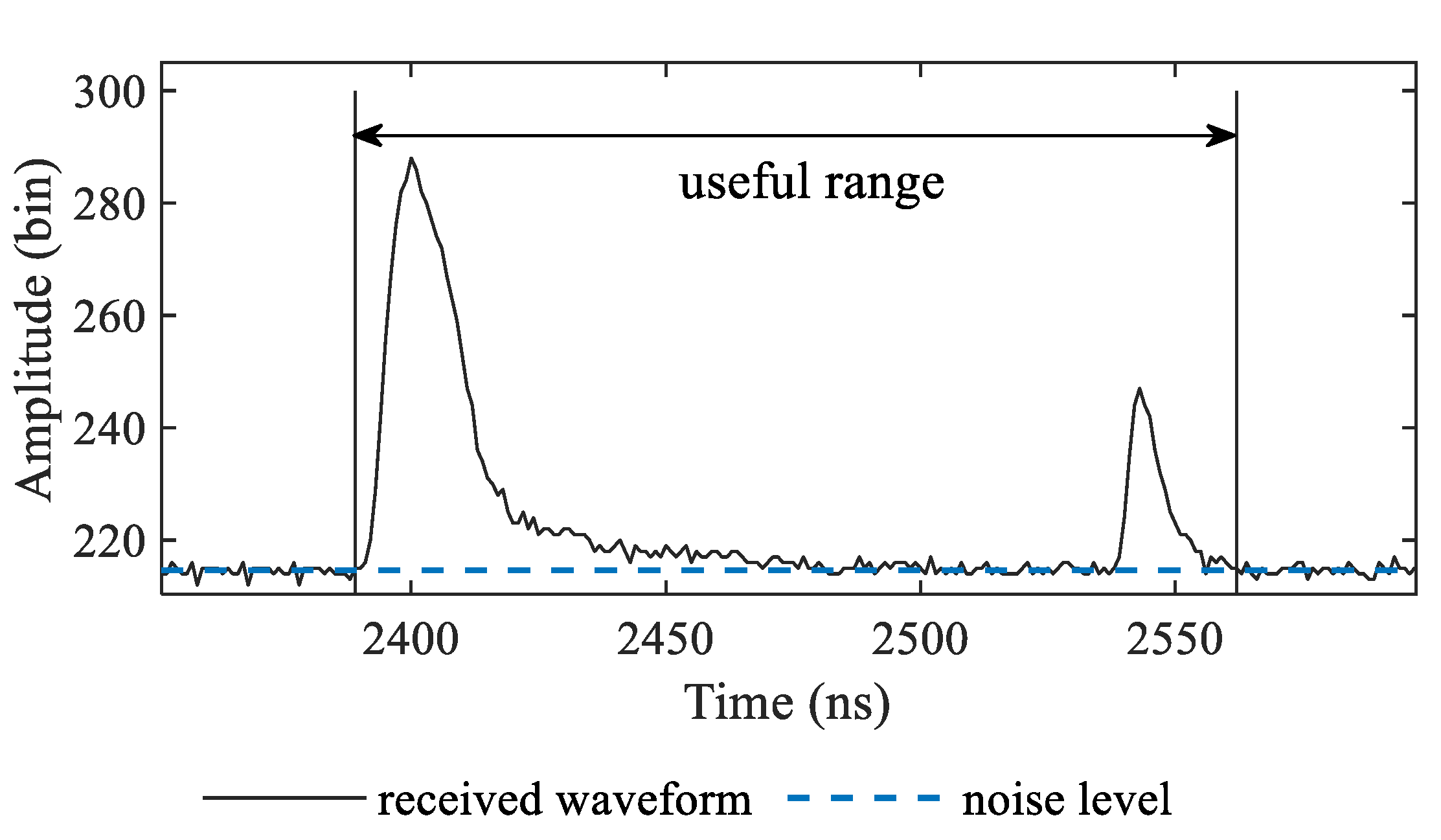
2.3.1. Useful Range
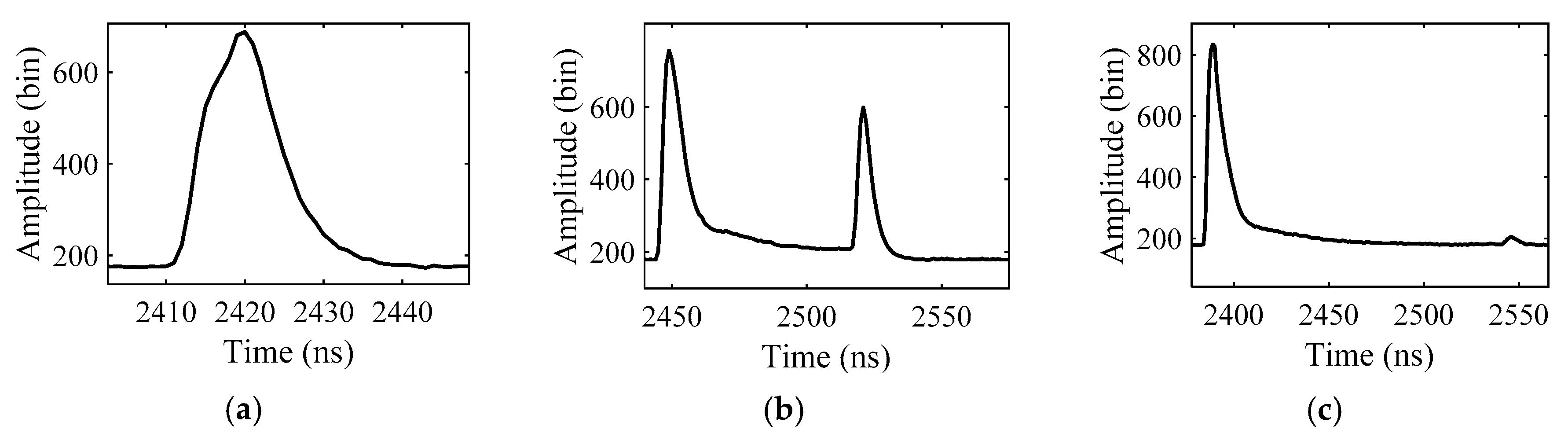
2.3.2. Waveform Classification
2.3.3. Richardson–Lucy Deconvolution
2.4. Signal Detection
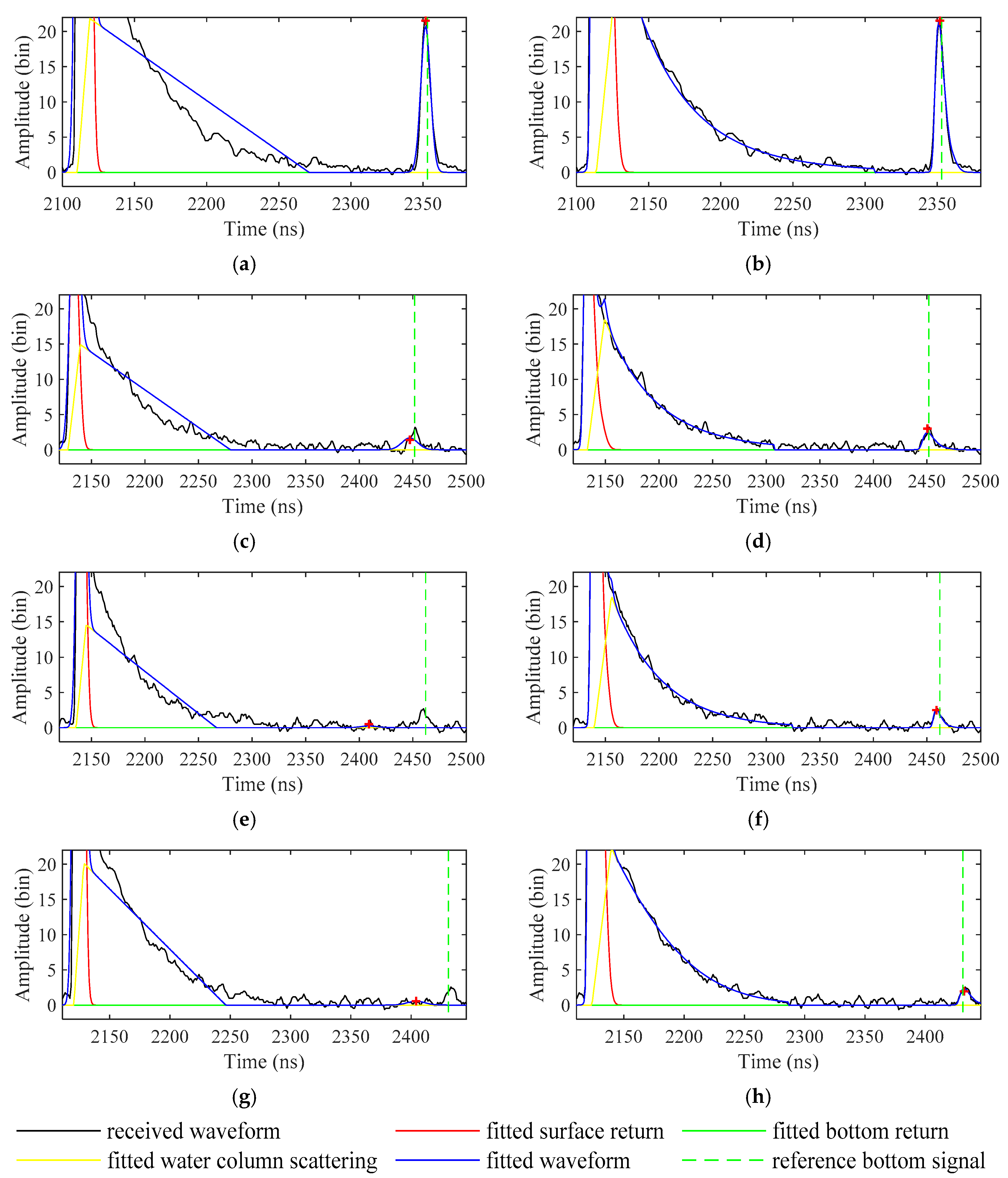
2.5. Waveform Decomposition
2.5.1. Modeling
2.5.2. Initialization
2.5.3. Fitting
3. Results and Discussion
3.1. Experiment Ⅰ: Waveform Classification
3.1.1. Statistical Analysis of Waveforms with Different Depths
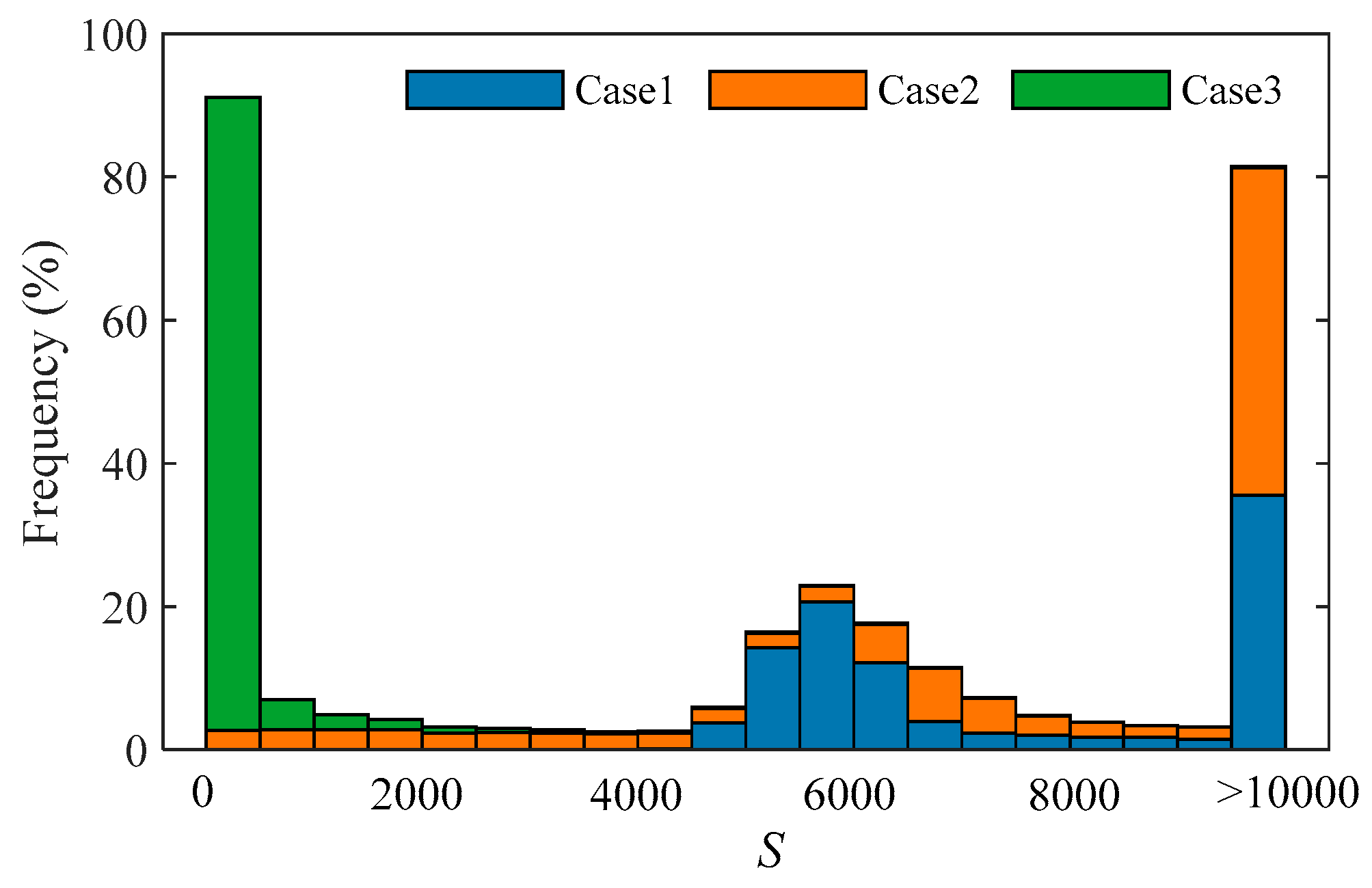
3.1.2. Distribution of S.
- Case 1: Water column scattering is completely covered by the surface and bottom signals.
- Case 2: The length of water column scattering that is not covered is less than the length of wC.
- Case 3: The length of water column scattering that is not covered is greater than the length of wC.
3.2. Experiment Ⅱ: Performance Analysis for the Processing Algorithms in Shallow Water
3.2.1. Reference Data
3.2.2. Surface Signal Detection
3.2.3. Adaptability Analysis of the EW Model
3.3. Experiment Ⅲ: Performance Analysis for the Processing Algorithms in Deep Water
3.3.1. Reference Data
3.3.2. Bottom Signal Detection
3.3.3. Adaptability Analysis of the EFSP Model
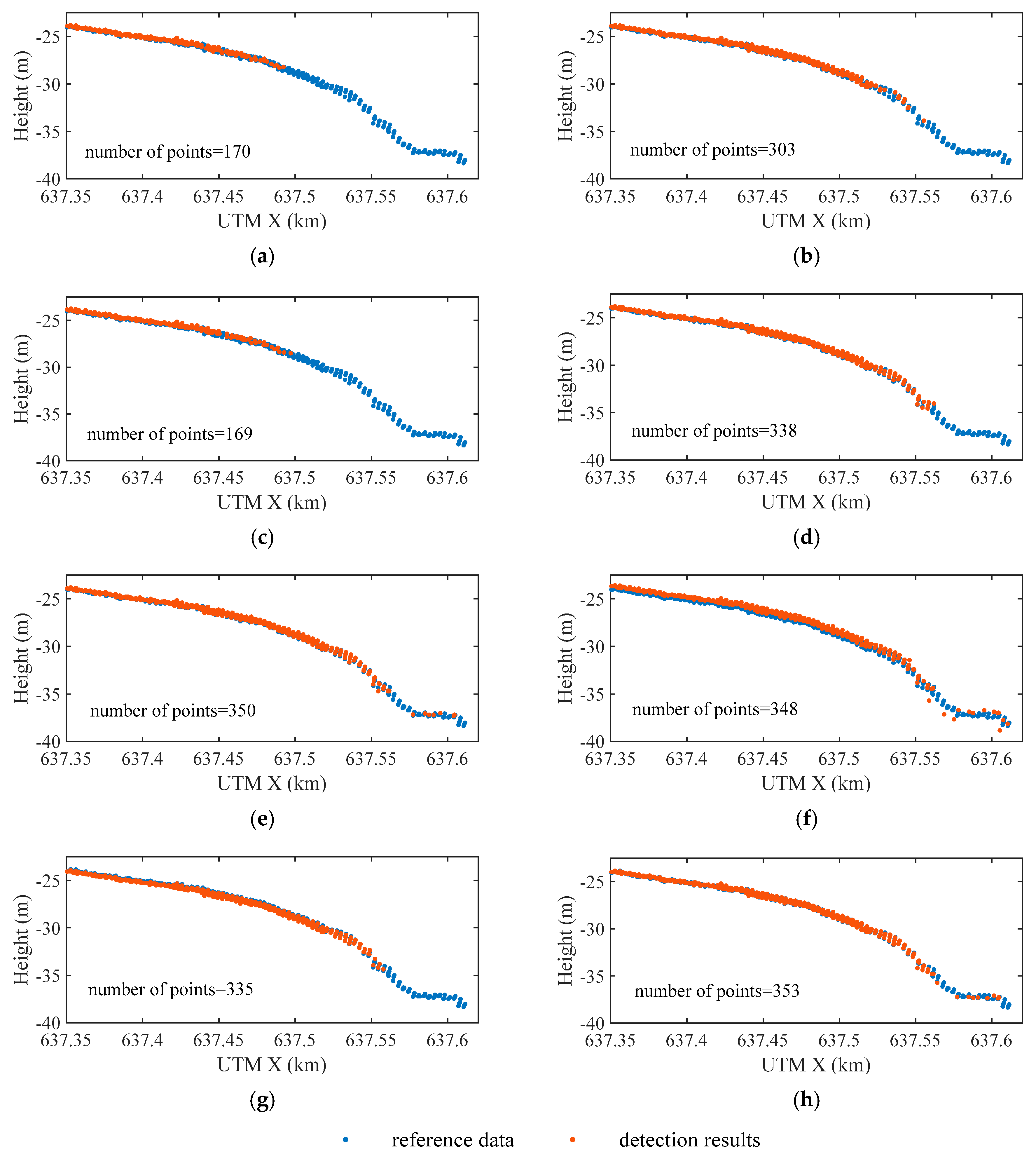
3.4. Experiment Ⅳ: Accuracy Assessment for the Processing Algorithms
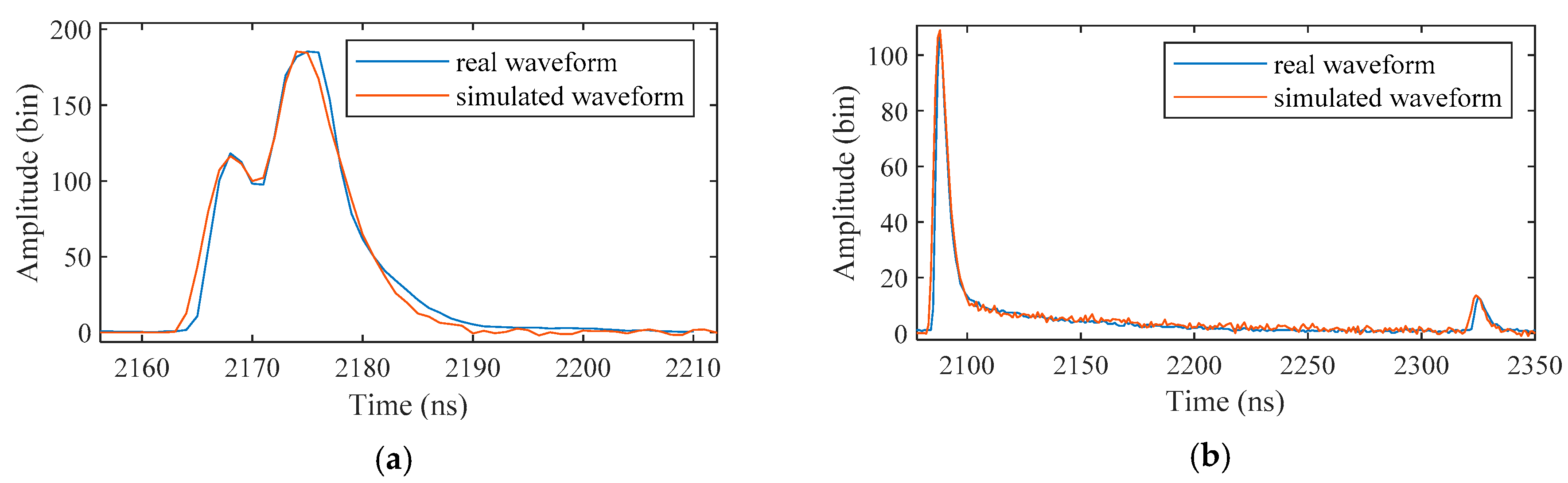
3.4.1. Simulated Data
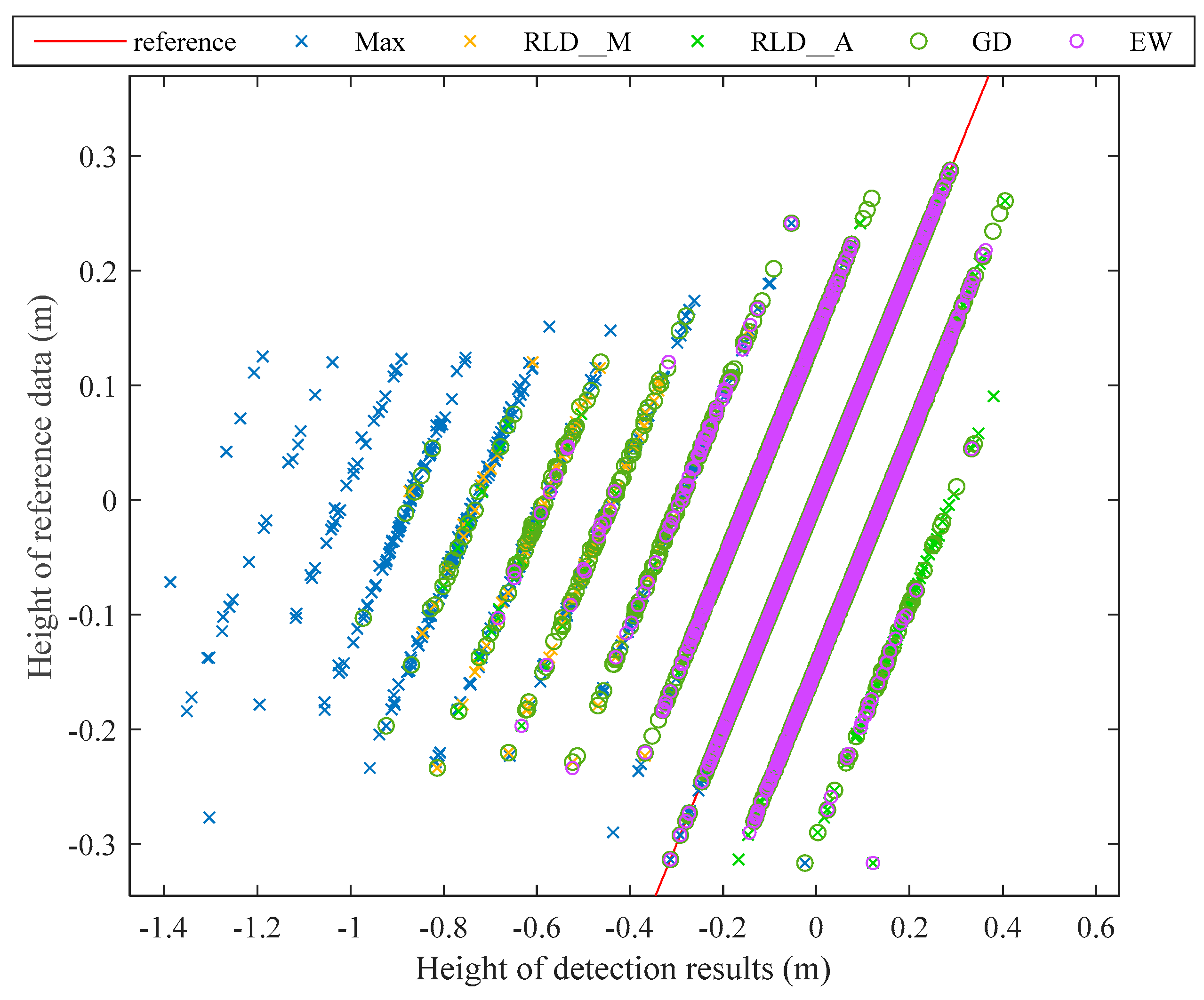
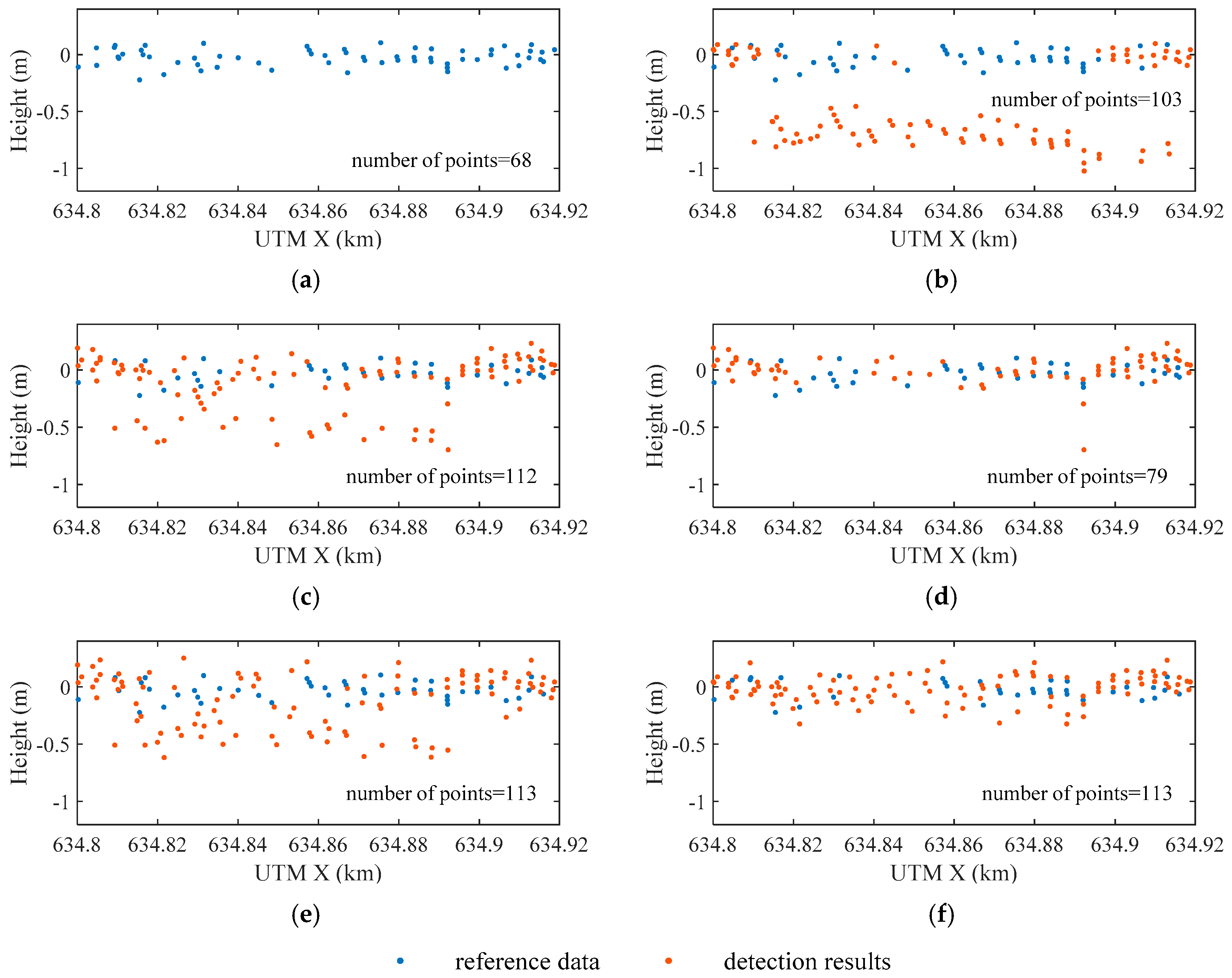
3.4.2. Signal Detection in Shallow Water
3.4.3. Signal Detection in Deep Water
4. Conclusions
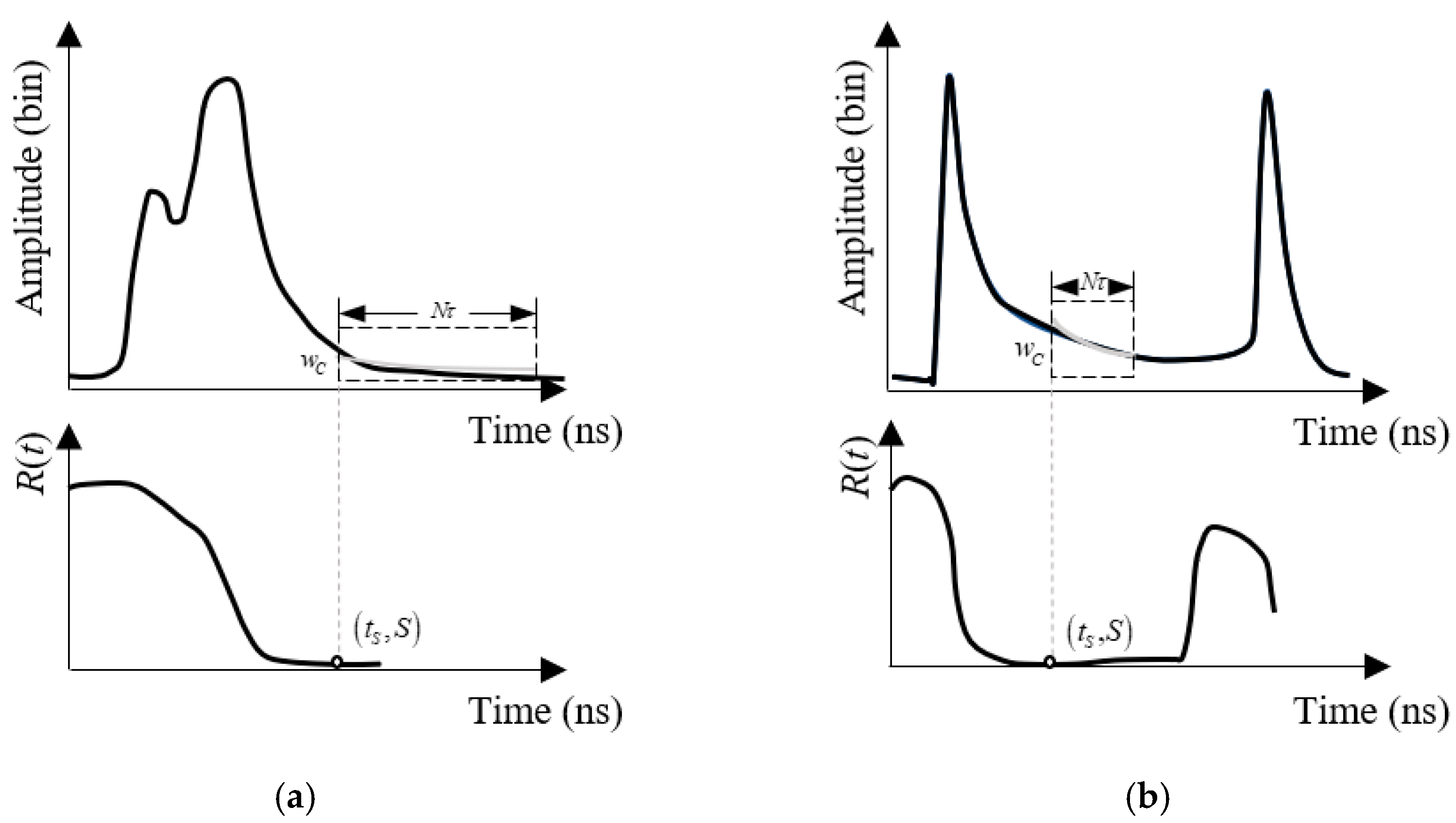
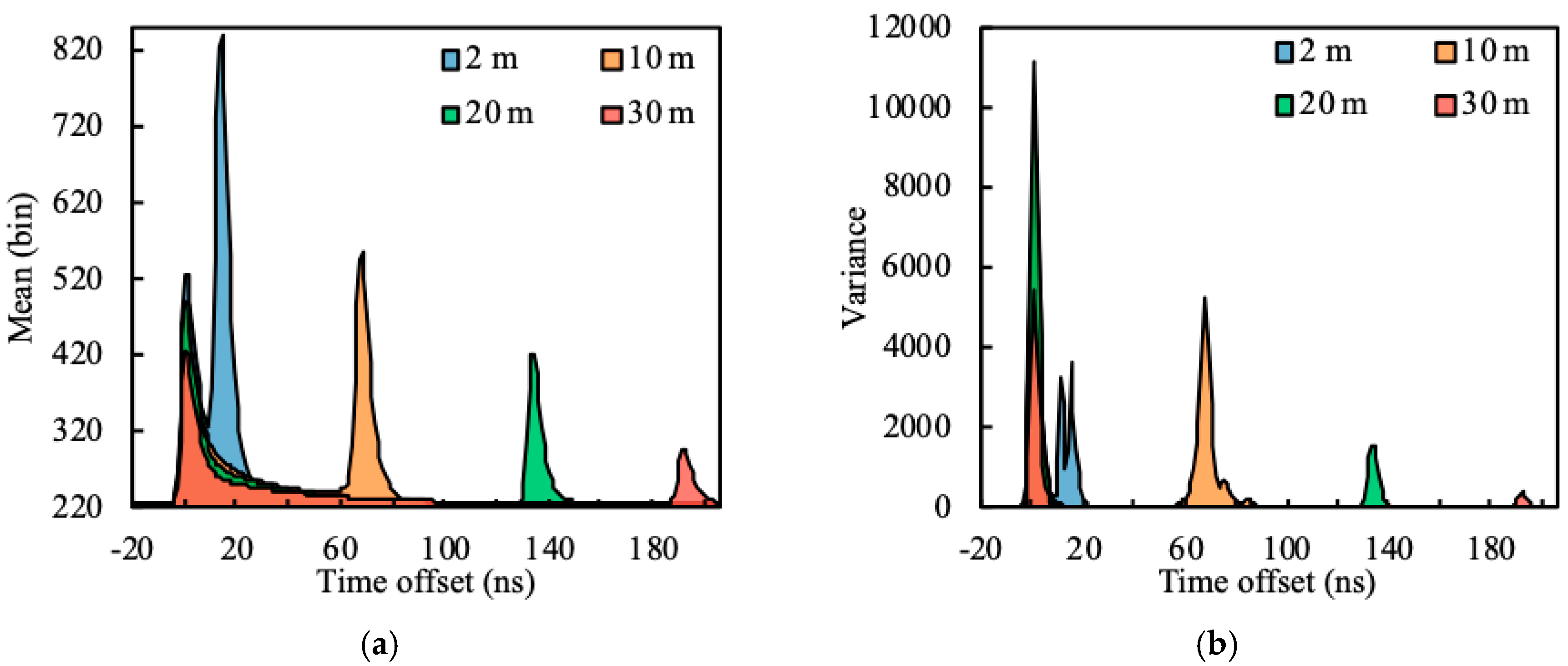
- Water column scattering can be used as a sign to distinguish the received waveforms in terms of depth. The defined parameter S can be used to measure the similarity between the received waveforms and the water column scattering. Since water column scattering is covered in the shallow water waveform, the S of the shallow water waveform is obviously greater than that of the deep water waveform. Thus, waveforms can be classified precisely according to S.
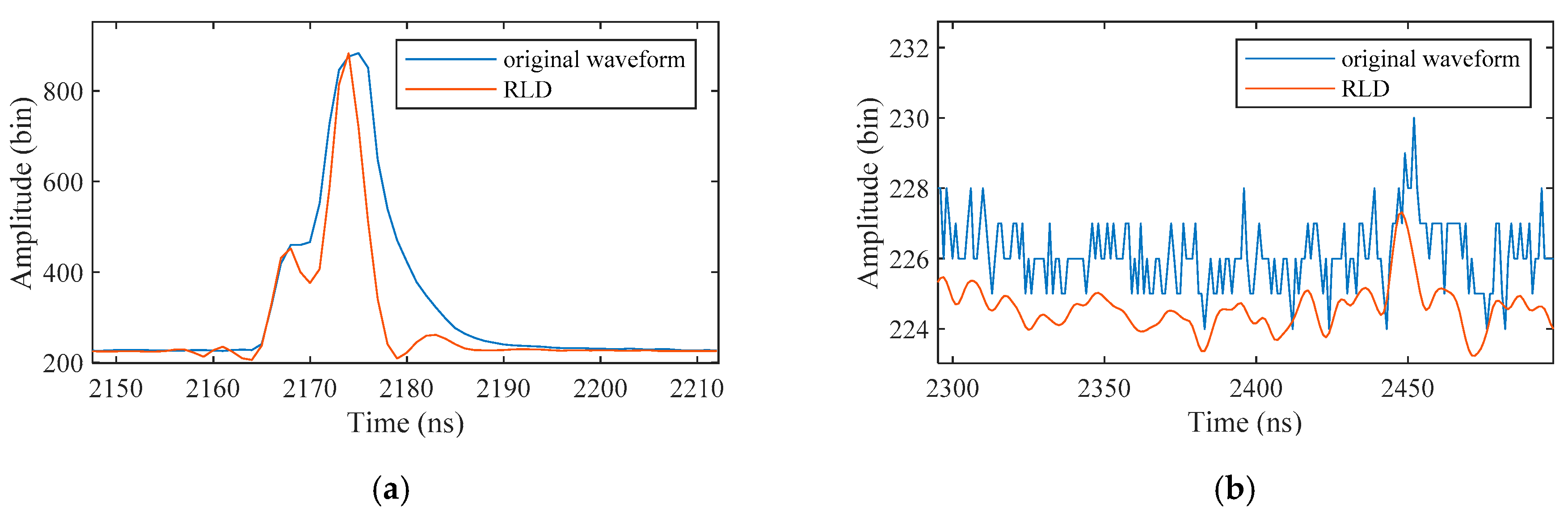
- For the waveform preprocessing, improving the signal resolution is more efficient than denoising. With an appropriate signal detection threshold, RLD always performs better than ASDF with a higher signal detection rate. Although filtering algorithms can remove the noise in signals and improve the accuracy of signal detection, the weak bottom signal may be filtered out as noise in the meantime.
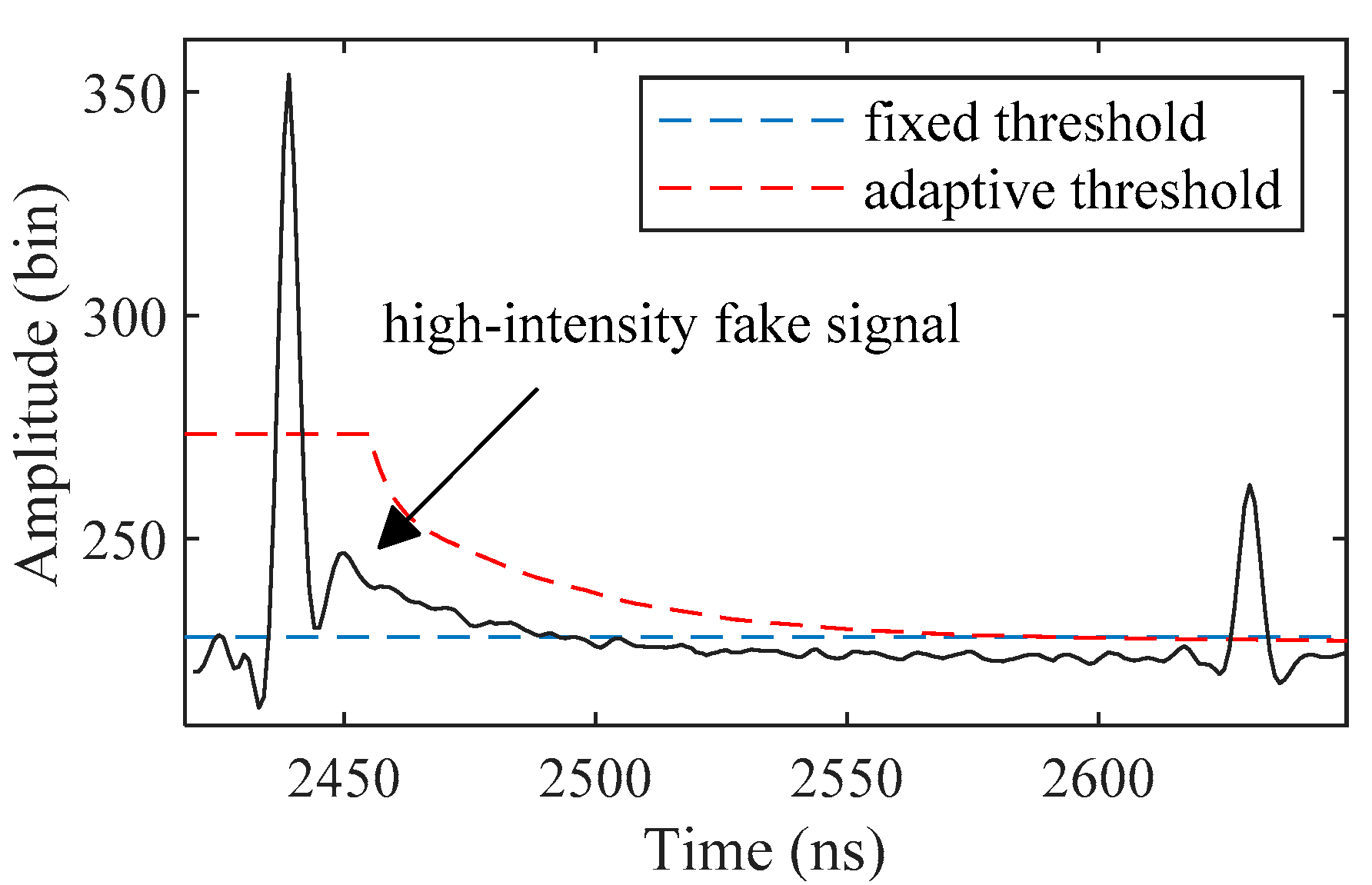
- The adaptive threshold can improve the reliability of the signal detection. The intensity of the bottom signal varies greatly with water depth, while the noise in water column scattering may be stronger than the bottom signal, leading to the detection of fake signals. Furthermore, although RLD is a deconvolution algorithm with good noise resistance, noise is inevitably introduced in the process. The adaptive threshold can better cope with the fake signals because it takes into account the effects of the water column.
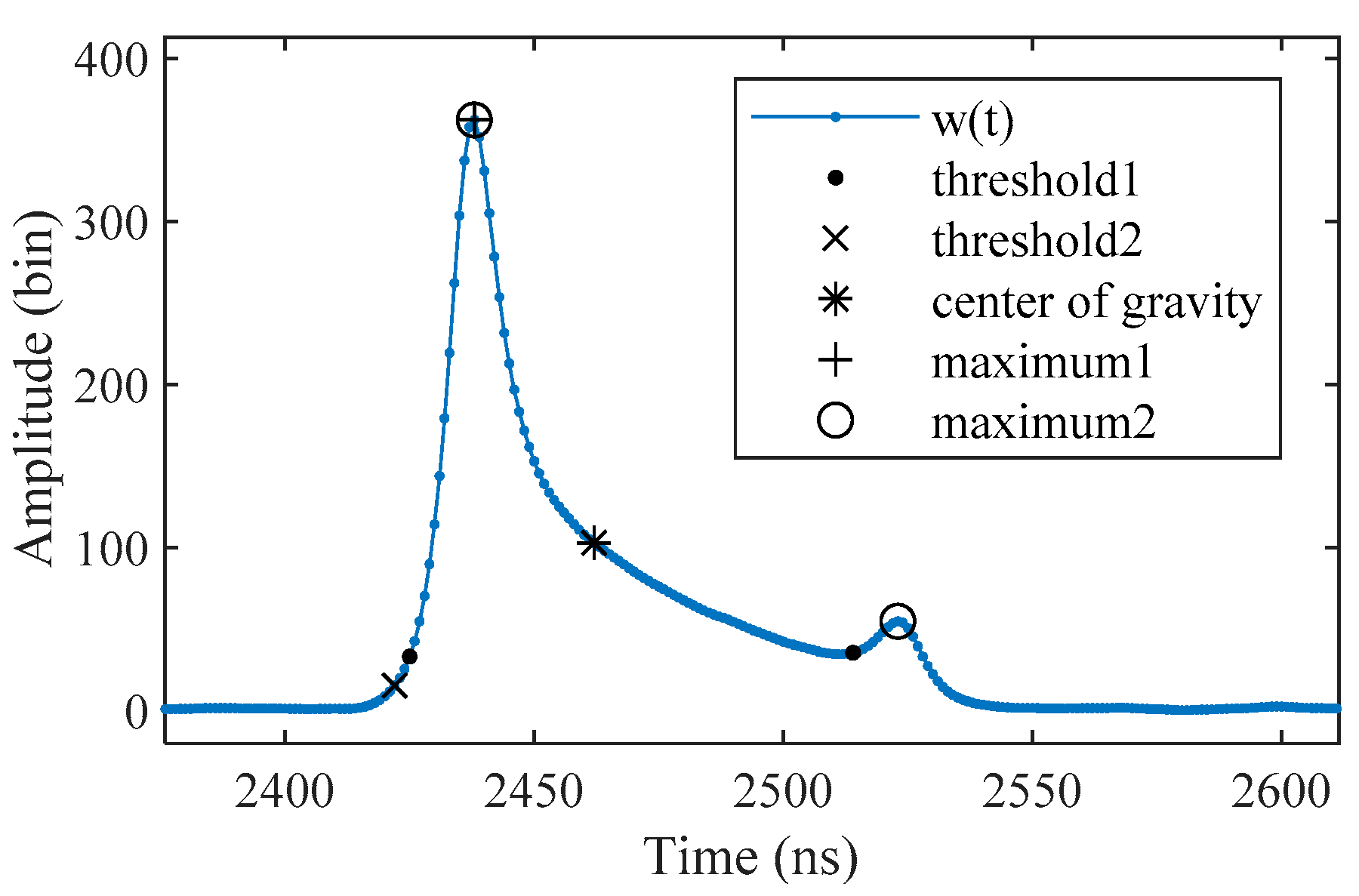
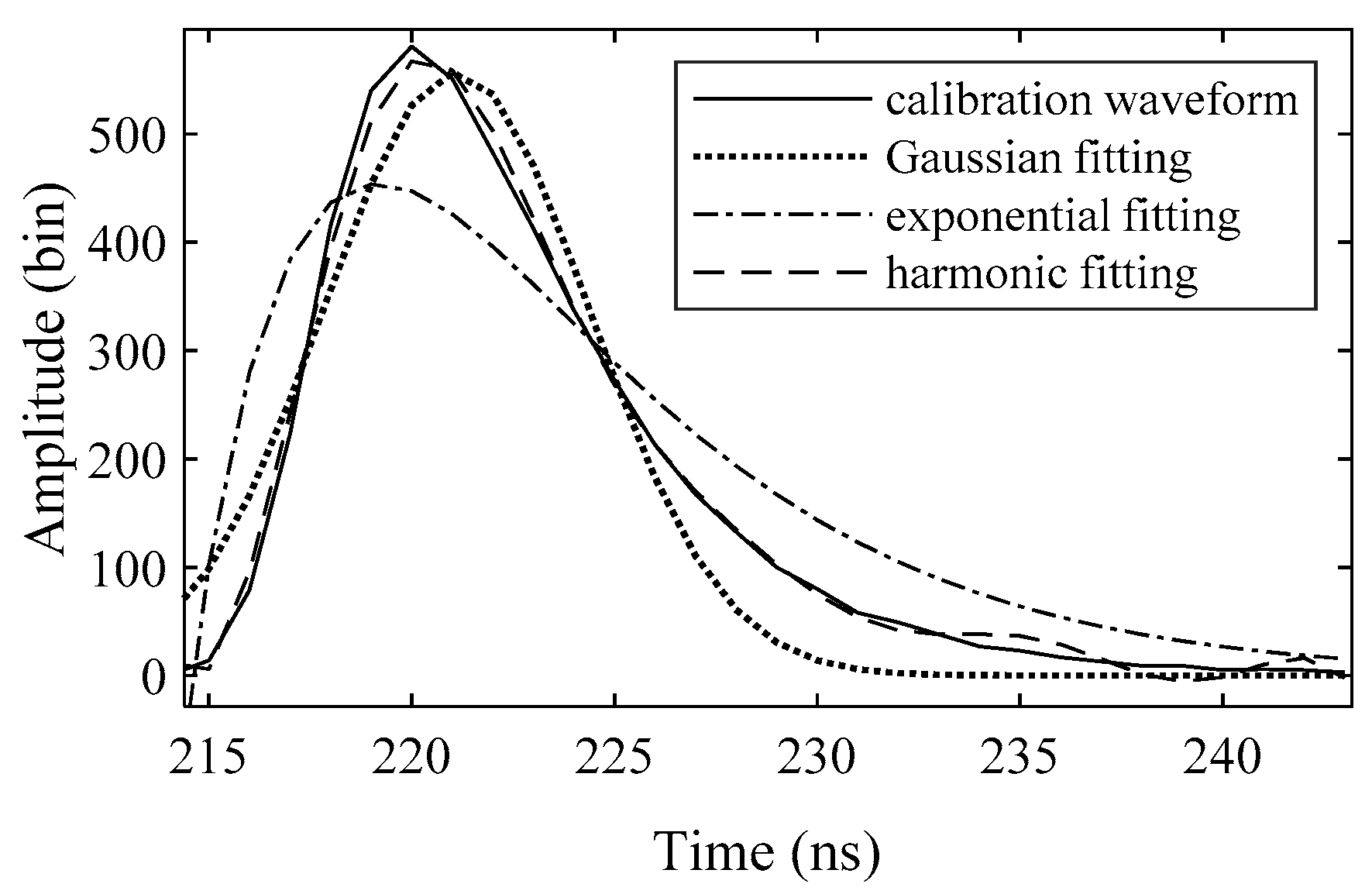
- With an appropriate model and reliable initial values, waveform decomposition can significantly improve the signal detection rate and accuracy. The proposed models, EW and EFSP, can fit the waveforms well in most cases. Compared with the Gaussian function, the transformation of the calibration waveform can better fit the water surface and bottom signals. The exponential function with a second-order polynomial is consistent with the shape of water column scattering in the waveform. The TR algorithm can solve the model parameters in a reasonable region and provide an accurate solution. The results of waveform decomposition are based on the whole waveform and are accurate to the sub-sampling interval. Even when the initial values are wrong, the detection results can be corrected by waveform decomposition in some cases. In addition, the processing time of waveform decomposition is long, meaning that whether the wave decomposition step should be added depends on the accuracy requirements in practical applications. The waveform decomposition model proposed in this paper is for the Mapper5000 system and may need relevant adjustments when applied to waveforms acquired by other ALB systems.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

Appendix B

References
- Hickman, G.D.; Hogg, J.E. Application of an airborne pulsed laser for near shore bathymetric measurements. Remote Sens. Environ. 1969, 1, 47–58. [Google Scholar] [CrossRef]
- Guenther, G.C. Airborne lidar bathymetry. In Digital Elevation Model Technologies and Applications: The Dem Users Manual, 2nd ed.; Maune, D.F., Ed.; ASPRS Publications: Bethesda, MD, USA, 2007; pp. 253–320. [Google Scholar]
- Guenther, G.C.; Cunningham, A.G.; Laroque, P.E.; Reid, D.J. Meeting the accuracy challenge in airborne Lidar bathymetry. In Proceedings of the 20th EARSeL Symposium: Workshop on Lidar Remote Sensing of Land and Sea, Dresden, Germany, 16–17 June 2000. [Google Scholar]
- Feurer, D.; Bailly, J.-S.; Puech, C.; Le Coarer, Y.; Viau, A.A. Very-high-resolution mapping of river-immersed topography by remote sensing. Prog. Phys. Geogr. 2008, 32, 403–419. [Google Scholar] [CrossRef]
- Collin, A.; Long, B.; Archambault, P. Salt-marsh characterization, zonation assessment and mapping through a dual-wavelength LiDAR. Remote Sens. Environ. 2010, 114, 520–530. [Google Scholar] [CrossRef]
- Finkl, C.W.; Makowski, C. Autoclassification versus cognitive interpretation of digital bathymetric data in terms of geomorphological features for seafloor characterization. J. Coast. Res. 2015, 31, 1–16. [Google Scholar] [CrossRef]
- Pan, Z.; Glennie, C.; Hartzell, P.; Fernandez-Diaz, J.; Legleiter, C.; Overstreet, B. Performance assessment of high resolution airborne full waveform lidar for shallow river bathymetry. Remote Sens. 2015, 7, 5133–5159. [Google Scholar] [CrossRef]
- Lesaignoux, A.; Bailly, J.; Feurer, D. Small water depth detection from green lidar simulated full waveforms: Application to gravel-bed river bathymetry. In Proceedings of the Physics in Signal and Image Processing (PSIP) Fifth Internation Conference, Mulhouse, France, 31 January–2 February 2007. [Google Scholar]
- Mandlburger, G.; Pfennigbauer, M.; Pfeifer, N. Analyzing near water surface penetration in laser bathymetry—A case study at the River Pielach. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Antalya, Turkey, 11–13 November 2013. [Google Scholar]
- Wang, C.-K.; Philpot, W.D. Using airborne bathymetric LiDAR to detect bottom type variation in shallow waters. Remote Sens. Environ. 2007, 106, 123–135. [Google Scholar] [CrossRef]
- Pe’eri, S.; Philpot, W. Increasing the existence of very shallow-water LIDAR measurements using the red-channel waveforms. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1217–1223. [Google Scholar] [CrossRef]
- Allouis, T.; Bailly, J.S.; Pastol, Y.; Le Roux, C. Comparison of LiDAR waveform processing methods for very shallow water bathymetry using Raman, near-infrared and green signals. Earth Surf. Process. Landf. 2010, 35, 640–650. [Google Scholar] [CrossRef]
- Zhao, J.; Zhao, X.; Zhang, H.; Zhou, F. Shallow water measurements using a single green laser corrected by building a near water surface penetration model. Remote Sens. 2017, 9, 426. [Google Scholar] [CrossRef]
- Mallet, C.; Bretar, F. Full-waveform topographic lidar: State-of-the-art. ISPRS J. Photogramm. Remote Sens. 2009, 64, 1–16. [Google Scholar] [CrossRef]
- Wang, C.; Li, Q.; Liu, Y.; Wu, G.; Liu, P.; Ding, X. A comparison of waveform processing algorithms for single-wavelength LiDAR bathymetry. ISPRS J. Photogramm. Remote Sens. 2015, 101, 22–35. [Google Scholar] [CrossRef]
- Collin, A.; Archambault, P.; Long, B. Mapping the shallow water seabed habitat with the SHOALS. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2947–2955. [Google Scholar] [CrossRef]
- Abdallah, H.; Bailly, J.S.; Baghdadi, N.; Saint-Geours, N.; Fabre, F. Potential of space-borne LiDAR sensors for global bathymetry in coastal and inland waters. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 202–216. [Google Scholar] [CrossRef]
- Abady, L.; Bailly, J.S.; Baghdadi, N.; Pastol, Y.; Abdallah, H. Assessment of quadrilateral fitting of the water column contribution in lidar waveforms on bathymetry estimates. IEEE Geosci. Remote Sens. 2014, 11, 813–817. [Google Scholar] [CrossRef]
- Ding, K.; Li, Q.; Zhu, J.; Wang, C.; Guan, M.; Chen, Z.; Yang, C.; Cui, Y.; Liao, J. An improved quadrilateral fitting algorithm for the water column contribution in airborne bathymetric lidar waveforms. Sensors 2018, 18, 552. [Google Scholar] [CrossRef]
- Schwarz, R.; Mandlburger, G.; Pfennigbauer, M.; Pfeifer, N. Design and evaluation of a full-wave surface and bottom-detection algorithm for LiDAR bathymetry of very shallow waters. ISPRS J. Photogramm. Remote Sens. 2019, 150, 1–10. [Google Scholar] [CrossRef]
- Saylam, K.; Brown, R.A.; Hupp, J.R. Assessment of depth and turbidity with airborne Lidar bathymetry and multiband satellite imagery in shallow water bodies of the Alaskan North Slope. Int. J. Appl. Earth Obs. Geoinf. 2017, 58, 191–200. [Google Scholar] [CrossRef]
- Wu, J.; Van Aardt, J.; Asner, G.P. A comparison of signal deconvolution algorithms based on small-footprint lidar waveform simulation. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2402–2414. [Google Scholar] [CrossRef]
- Wagner, W.; Roncat, A.; Melzer, T.; Ullrich, A. Waveform analysis techniques in airborne laser scanning. In Proceedings of the ISPRS Workshop on Laser Scanning 2007 and SilviLaser 2007, Espoo, Finland, 12–14 September 2007. [Google Scholar]
- Richter, K.; Maas, H.-G.; Westfeld, P.; Weiß, R. An Approach to Determining Turbidity and Correcting for Signal Attenuation in Airborne Lidar Bathymetry. PFG J. Photogramm. Remote Sens. Geoinf. Sci. 2017, 85, 31–40. [Google Scholar] [CrossRef]
- Launeau, P.; Giraud, M.; Robin, M.; Baltzer, A. Full-Waveform LiDAR Fast Analysis of a Moderately Turbid Bay in Western France. Remote Sens. 2019, 11, 117. [Google Scholar] [CrossRef]
- Parrish, C.E.; Jeong, I.; Nowak, R.D.; Brent Smith, R. Empirical comparison of full-waveform lidar algorithms: Range extraction and discrimination performance. Photogramm. Eng. Remote Sens. 2011, 77, 825–838. [Google Scholar] [CrossRef]
- Jutzi, B.; Stilla, U. Range determination with waveform recording laser systems using a Wiener Filter. ISPRS J. Photogramm. Remote Sens. 2006, 61, 95–107. [Google Scholar] [CrossRef]
- Richardson, W.H. Bayesian-based iterative method of image restoration. J. Opt. Soc. Am. 1972, 62, 55–59. [Google Scholar] [CrossRef]
- Lucy, L.B. An iterative technique for the rectification of observed distribution. Astron. J. 1974, 79, 745–775. [Google Scholar] [CrossRef]
- Wu, J.; Van Aardt, J.; McGlinchy, J.; Asner, G.P. A robust signal preprocessing chain for small-footprint waveform lidar. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3242–3255. [Google Scholar] [CrossRef]
- Naik, R.K.; Sahu, P.K. Comprehensive study on deconvolution and denoising of LiDAR back-scattered signal. In Proceedings of the 2013 International Conference on Microwave and Photonics (ICMAP), Dhanbad, India, 13–15 December 2013. [Google Scholar]
- White, R.L. Image restoration using the damped Richardson-Lucy method. In The Restoration of HST Images and Spectra-II; Hanisch, R.J., White, R.L., Eds.; STScI: Baltimore, MD, USA, 1994. [Google Scholar]
- Wagner, W.; Ullrich, A.; Melzer, T.; Briese, C.; Kraus, K. From single-pulse to full-waveform airborne laser scanners: Potential and practical challenges. In Proceedings of the International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, Istanbul, Turkey, 12–23 July 2004; pp. 201–206. [Google Scholar]
- Schwarz, R.; Pfeifer, N.; Pfennigbauer, M.; Ullrich, A. Exponential decomposition with implicit deconvolution of lidar backscatter from the water column. PFG J. Photogramm. Remote Sens. Geoinf. Sci. 2017, 85, 159–167. [Google Scholar] [CrossRef]
- Persson, Å.; Söderman, U.; Töpel, J.; Ahlberg, S. Visualization and analysis of full-waveform airborne laser scanner data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2005, 36, 103–108. [Google Scholar]
- Hofton, M.A.; Minster, J.B.; Blair, J.B. Decomposition of laser altimeter waveforms. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1989–1996. [Google Scholar] [CrossRef]
- Li, P.C.; Xu, Q.; Xing, S.; Liu, Z.; Geng, X.; Hou, X.; Zhang, J. Full-waveform LiDAR data decomposition method based on global convergent LM. Infrared Laser Eng. 2015, 44, 2262–2267. [Google Scholar]
- Hernandez-Marin, S.; Wallace, A.M.; Gibson, G.J. Bayesian analysis of lidar signals with multiple returns. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 2170–2180. [Google Scholar] [CrossRef]
- Yuan, Y. Recent advances in trust region algorithms. Math. Program. 2015, 151, 249–281. [Google Scholar] [CrossRef]
- Wang, X.; Yuan, Y. An augmented Lagrangian trust region method for equality constrained optimization. Optim. Method Softw. 2015, 30, 559–582. [Google Scholar] [CrossRef]
- Coleman, T.F.; Li, Y. An interior trust region approach for nonlinear minimization subject to bounds. SIAM J. Control. 1996, 6, 418–445. [Google Scholar] [CrossRef] [Green Version]
- Abdallah, H.; Baghdadi, N.; Bailly, J.S.; Pastol, Y.; Fabre, F. Wa-LiD: A new LiDAR simulator for waters. IEEE Geosci. Remote Sens. Lett. 2012, 9, 744–748. [Google Scholar] [CrossRef] [Green Version]
- Hu, S.; He, Y.; Chen, W.; Zhu, X.; Zang, H.; Lyu, D.; Tian, M.; Yu, J.; Tao, B.; Huang, T.; et al. Design of airborne dual-frequency laser radar system. Infrared Laser Eng. 2018, 47, 0930001. [Google Scholar]
- He, Y.; Hu, S.; Chen, W.; Zhu, X.; Wang, Y.; Yang, Z.; Zhu, X.; Lyu, D.; Yu, J.; Huang, T.; et al. Research Progress of Domestic Airborne Dual-Frequency LiDAR Detection Technology. Laser Optoelectron. Prog. 2018, 55, 082801. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pulse Repetition Frequency | Sampling Speed | Beam Divergence | Altitude | Speed | Swath Width |
|---|---|---|---|---|---|
| 5 kHz | 1 GHz | NIR: 2.5 mrad green: 1 mrad | 300 m | 190 km/h | 160 m |
| Algorithm | Dr (%) | RMSE (m) | min(d) (m) | Std. |
|---|---|---|---|---|
| Max | 95.39 | 0.1645 | 0.4414 | 0.2276 |
| RLD_M | 97.53 | 0.1218 | 0.3292 | 0.1309 |
| RLD_A | 97.19 | 0.1085 | 0.3292 | 0.1107 |
| GD | 97.29 | 0.1174 | 0.2208 | 0.1456 |
| EW | 99.11 | 0.0901 | 0.2208 | 0.1159 |
| Reference | 58.54 | — | — | 0.0839 |
| Algorithm | Dr (%) | RMSE (m) | max(d) (m) |
|---|---|---|---|
| Max | 31.22 | 0.1694 | 29.57 |
| ASDF_M | 53.80 | 0.0944 | 35.25 |
| RLD_M | 33.13 | 0.1498 | 30.36 |
| ASDF_A | 71.16 | 0.1124 | 37.50 |
| RLD_A | 73.88 | 0.1347 | 38.60 |
| dddNCFWF | 71.01 | 0.3798 | 41.14 |
| dddNCFWF_T | 71.98 | 0.2247 | 40.95 |
| QUAD | 66.39 | 0.1504 | 37.36 |
| EFSP | 74.64 | 0.1076 | 40.49 |
| Algorithm | Dr_S (%) | Dr_B (%) | RMSE_S (m) | RMSE_B (m) | min(d) (m) |
|---|---|---|---|---|---|
| Max | 69.88 | 66.96 | 0.1433 | 0.6365 | 0.5920 |
| RLD_M | 76.81 | 74.95 | 0.1437 | 0.3686 | 0.4178 |
| RLD_A | 71.77 | 74.87 | 0.1311 | 0.1266 | 0.4180 |
| GD | 78.70 | 59.07 | 0.1697 | 0.8832 | 0.1540 |
| EW | 94.75 | 97.92 | 0.1059 | 0.0845 | 0.0558 |
| Algorithm | Dr_S (%) | Dr_B (%) | RMSE_S (m) | RMSE_B (m) | max(d) (m) |
|---|---|---|---|---|---|
| Max | 100 | 0.00 | 0.0469 | — | — |
| ASDF_M | 100 | 0.22 | 0.0508 | 0.0835 | 43.36 |
| RLD_M | 100 | 20.35 | 0.0857 | 0.1896 | 49.92 |
| ASDF_A | 100 | 42.29 | 0.0508 | 0.1012 | 49.70 |
| RLD_A | 100 | 56.34 | 0.0857 | 0.1702 | 49.92 |
| dddNCFWF | 100 | 52.29 | 0.3994 | 0.4217 | 49.92 |
| dddNCFWF_T | 100 | 59.61 | 0.0434 | 0.0850 | 49.92 |
| QUAD | 100 | 46.97 | 0.1416 | 0.2573 | 49.92 |
| EFSP | 100 | 56.69 | 0.0616 | 0.0681 | 49.92 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, S.; Wang, D.; Xu, Q.; Lin, Y.; Li, P.; Jiao, L.; Zhang, X.; Liu, C. A Depth-Adaptive Waveform Decomposition Method for Airborne LiDAR Bathymetry. Sensors 2019, 19, 5065. https://doi.org/10.3390/s19235065
Xing S, Wang D, Xu Q, Lin Y, Li P, Jiao L, Zhang X, Liu C. A Depth-Adaptive Waveform Decomposition Method for Airborne LiDAR Bathymetry. Sensors. 2019; 19(23):5065. https://doi.org/10.3390/s19235065
Chicago/Turabian StyleXing, Shuai, Dandi Wang, Qing Xu, Yuzhun Lin, Pengcheng Li, Lin Jiao, Xinlei Zhang, and Chenbo Liu. 2019. "A Depth-Adaptive Waveform Decomposition Method for Airborne LiDAR Bathymetry" Sensors 19, no. 23: 5065. https://doi.org/10.3390/s19235065
APA StyleXing, S., Wang, D., Xu, Q., Lin, Y., Li, P., Jiao, L., Zhang, X., & Liu, C. (2019). A Depth-Adaptive Waveform Decomposition Method for Airborne LiDAR Bathymetry. Sensors, 19(23), 5065. https://doi.org/10.3390/s19235065