Real-Time Docking Ring Detection Based on the Geometrical Shape for an On-Orbit Spacecraft


Abstract
:1. Introduction
- (1)
- Our method is a general way to detect the docking ring from on-orbit spacecraft images. Based on the geometric properties and reflection characteristics of the target, the method adapts to various types of spacecraft in the complex and changeable space environment.
- (2)
- We develop novel arc selection strategies according to the geometric properties of the ellipse, and achieve better performance than the state-of-art approaches.
2. The Proposed Method
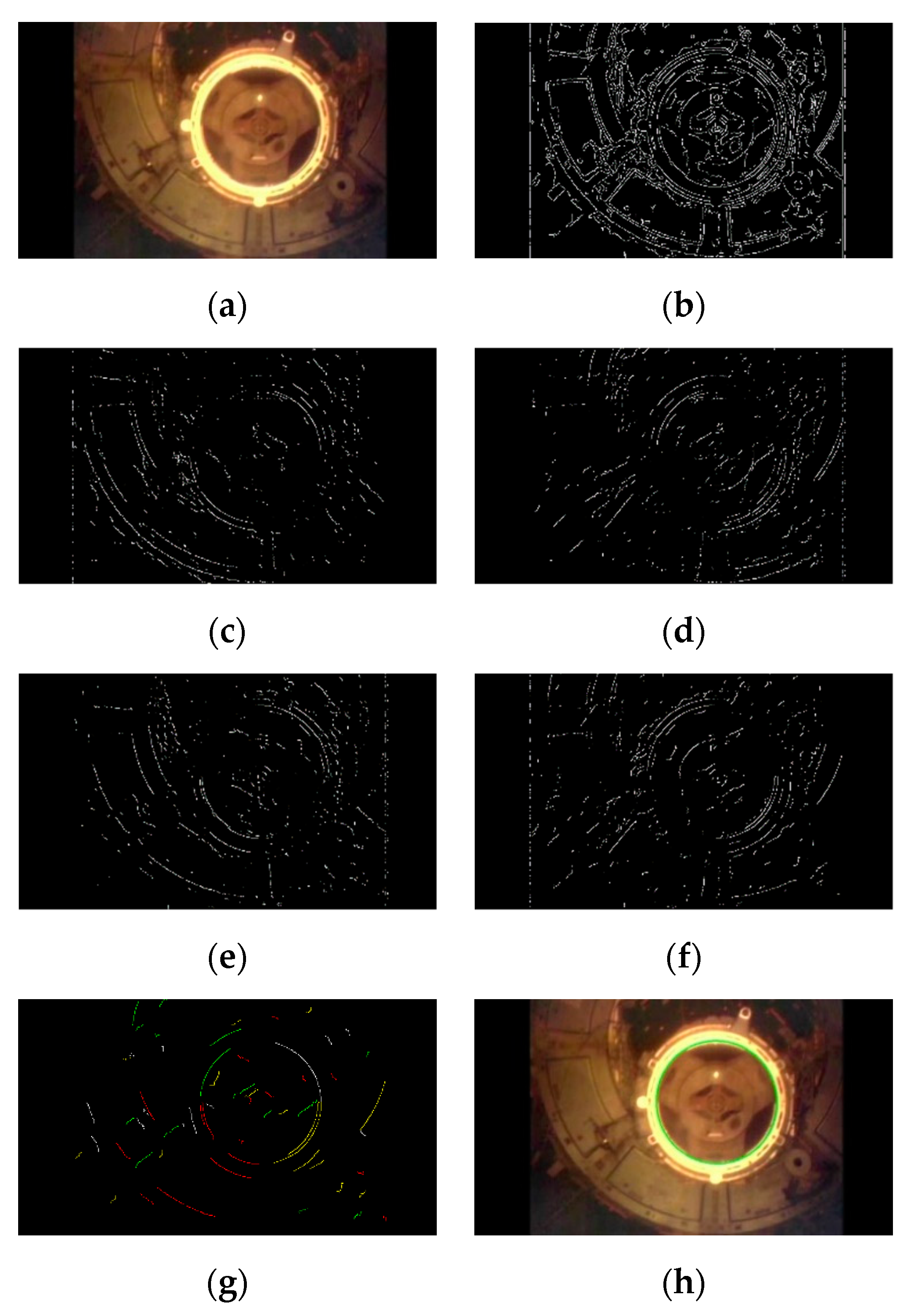
2.1. Arc Extraction
2.2. Ellipse Parameters Estimation
2.2.1. Arc Selection Strategy
- (1)
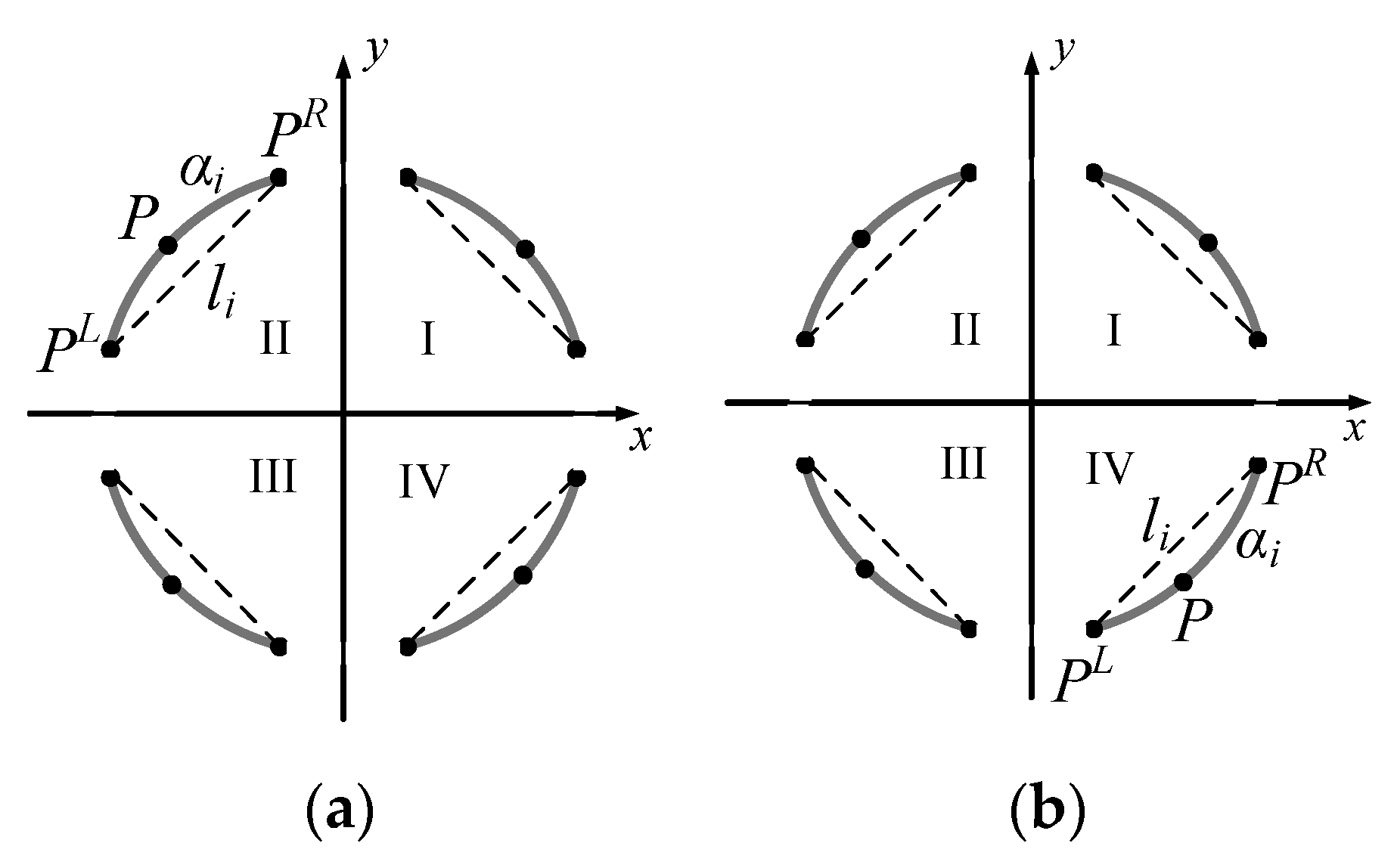
- Quadrant constraint. We selected three arcs of the four quadrants to estimate an ellipse in this paper. The possible quadrants of the three arcs were indicated as follows: (I, II, III), (II, III, IV), (III, IV, I), and (I, II, IV). It shows that the three arcs were situated in three adjacent quadrants. Therefore, the combination of two arcs only combined the arcs in adjacent quadrants, as described by (4).
- (2)
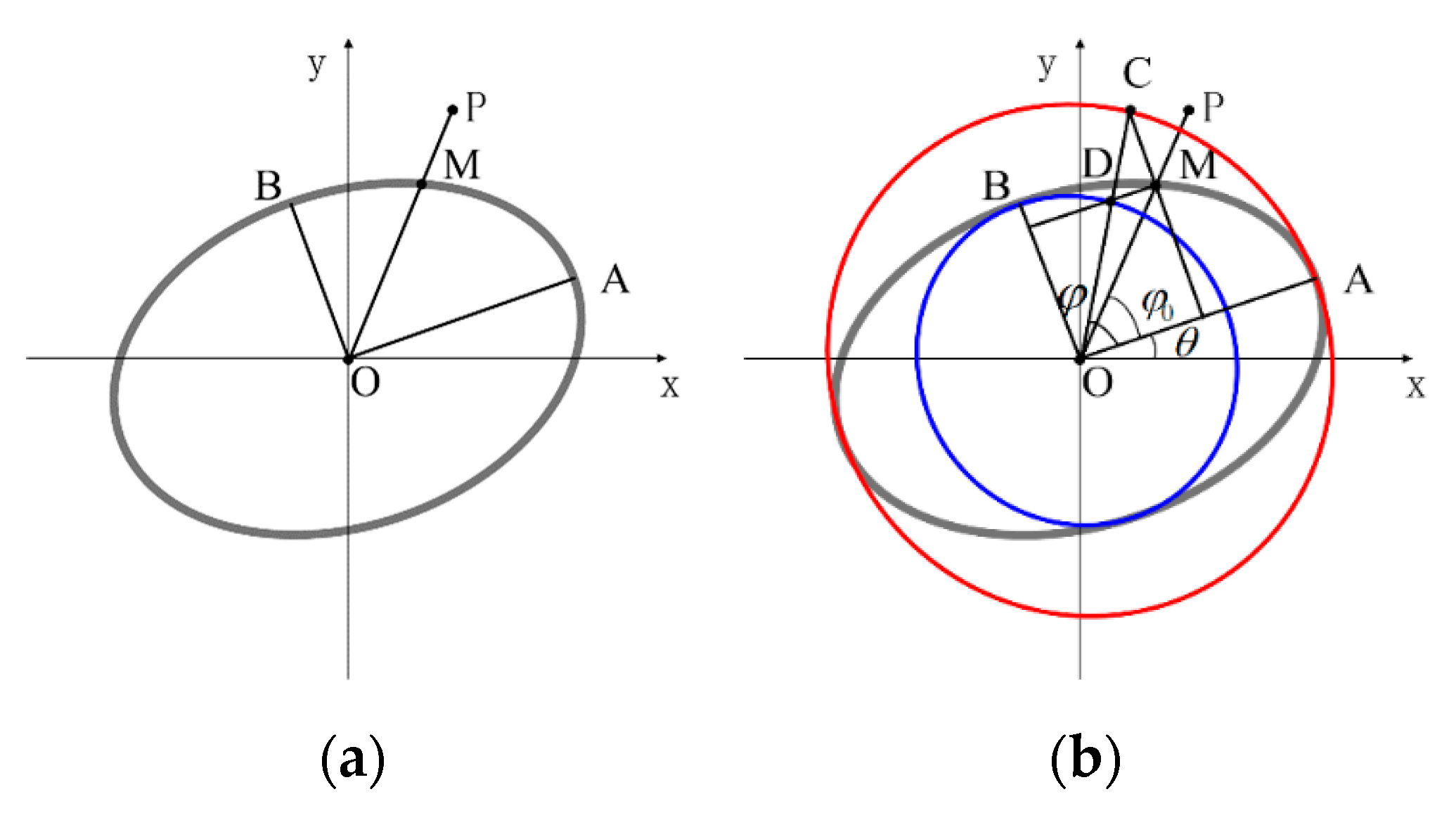
- Position constraint. Based on the quadrant constraint, if arc and arc belong to a same ellipse, the endpoints of the arcs are constrained by their relative position in the image, as shown in Figure 3a. Position constraint is described by (5).
- (3)
- Tangent constraint. Assume we drew a tangent line, the ellipse was completely on one side of the tangent line. We considered the endpoint of the arc as tangent point to draw the tangent, and the tangent direction was perpendicular to the gradient direction of the endpoint, as shown in Figure 3b. Then, two arcs for combination must satisfy the constraints in (6).
- (1)
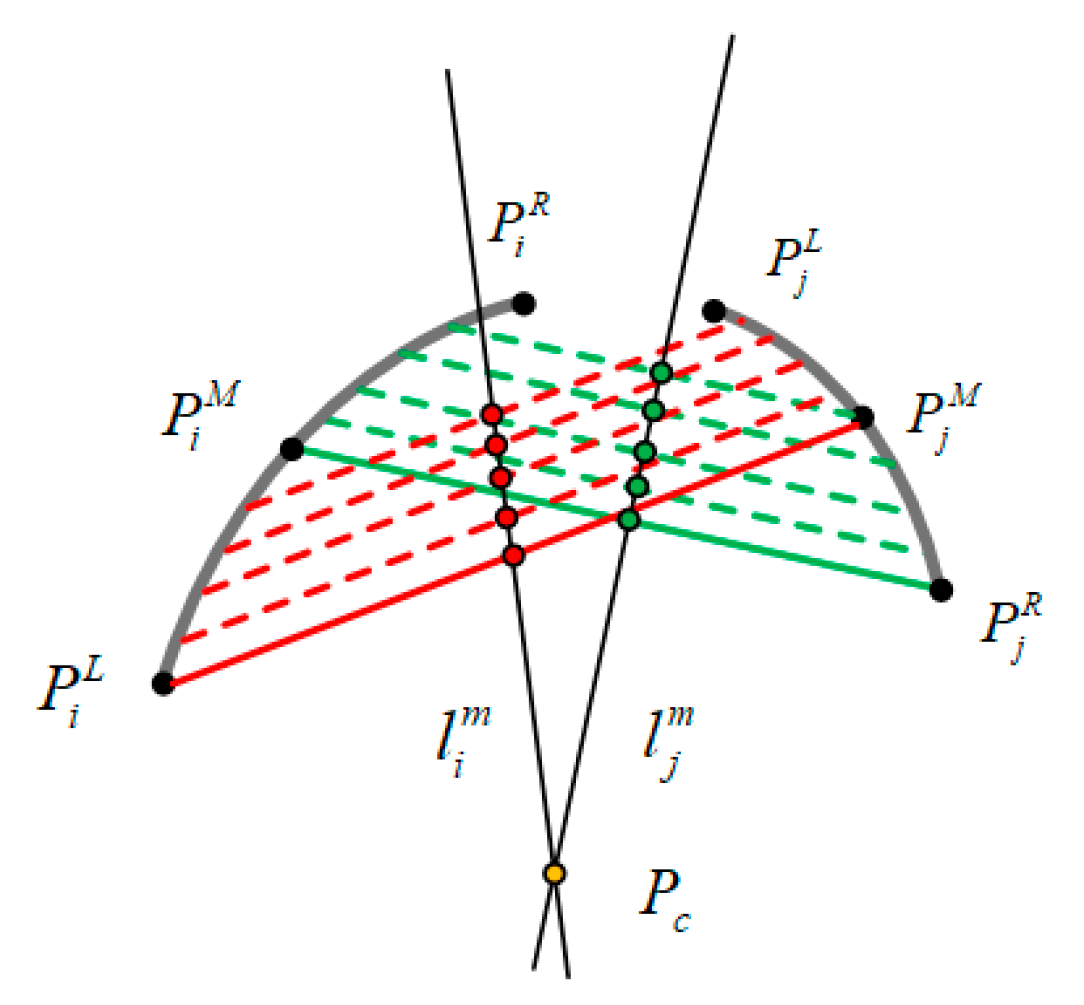
- Any two of three arcs in the adjacent quadrant met the arc selection constraints for two arcs. There were two groups of arc pair in the adjacent quadrant, each group of arcs needed to meet the arc selection for two arcs.
- (2)
- Constraints on the center of the ellipse. Three arcs originated from the same ellipse had the same ellipse center. To avoid the effect of the image noise, the centers of the ellipses calculated by two groups of arcs were required to be located within a preset distance.
2.2.2. Parameter Estimation for Candidate Ellipse
2.3. Validity Verification
3. Experiment
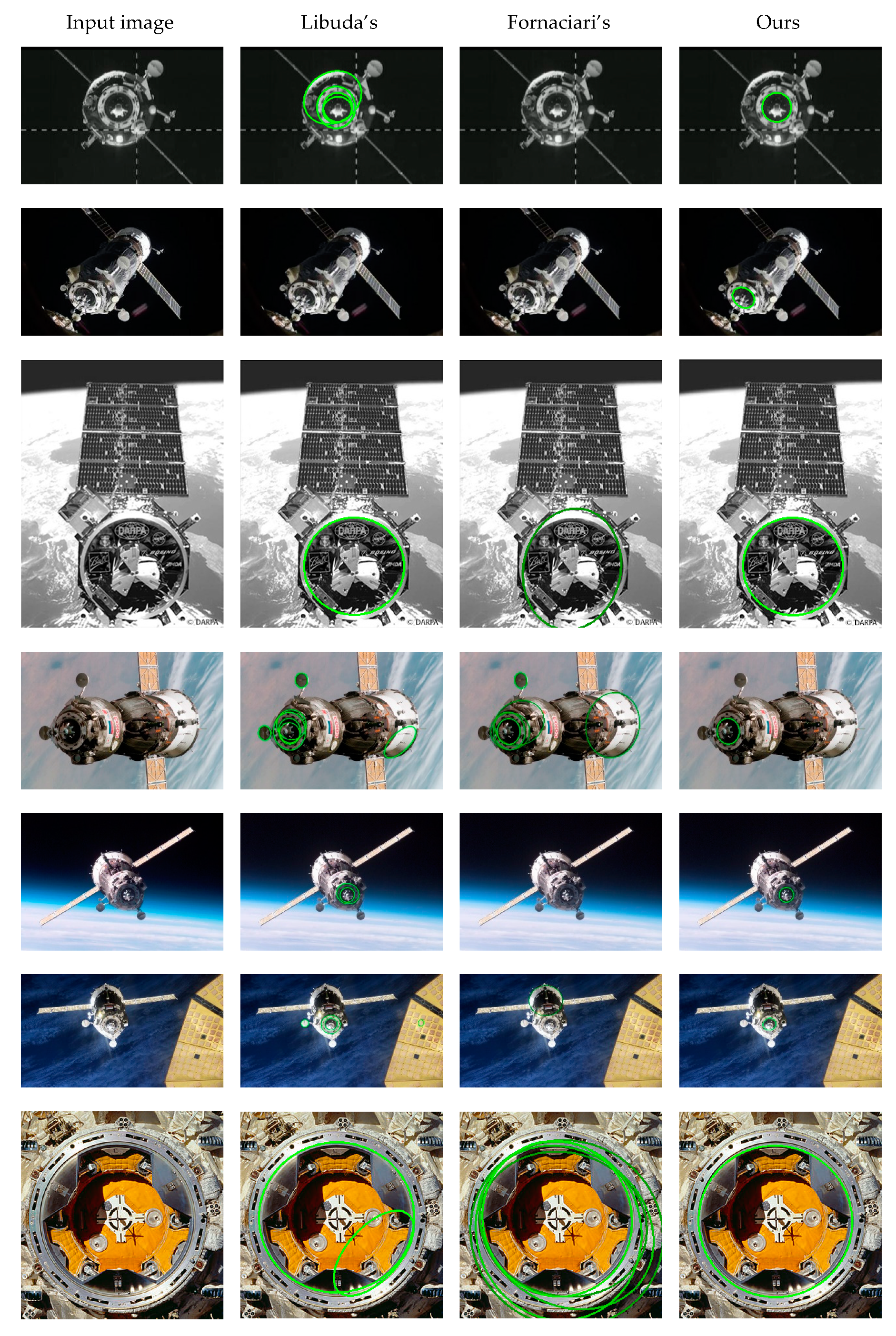
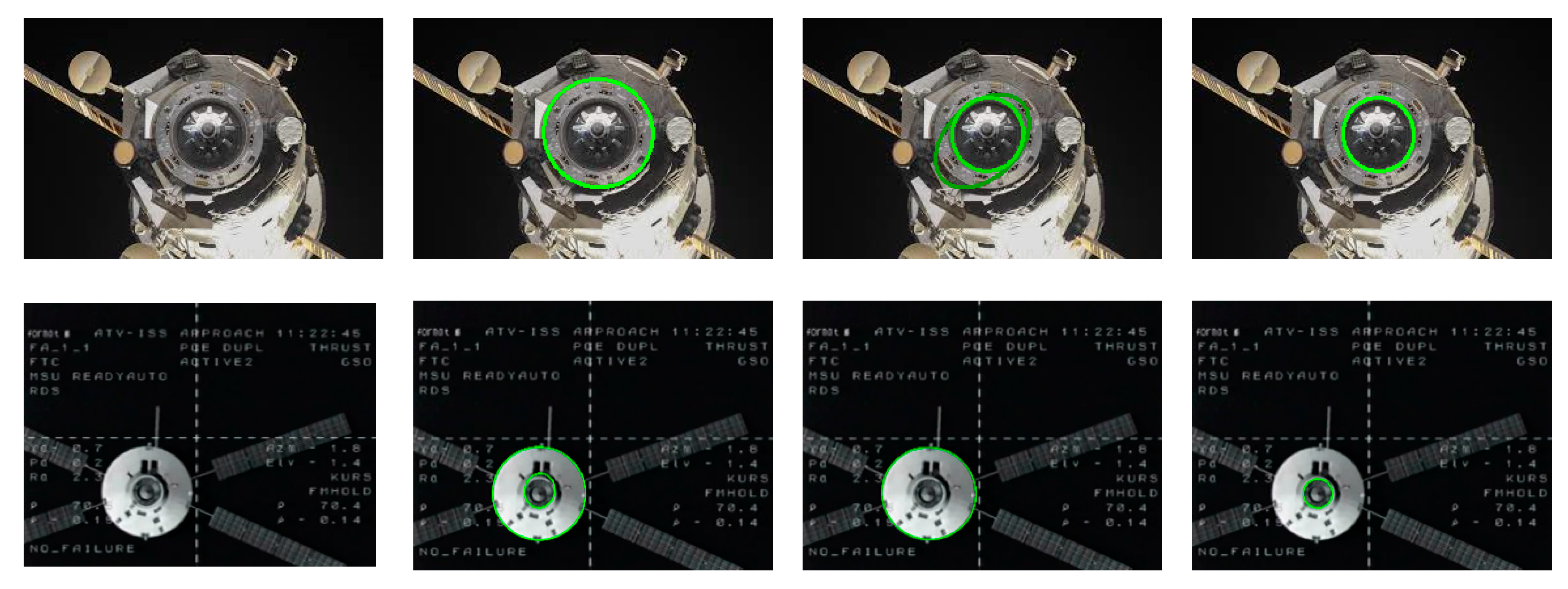
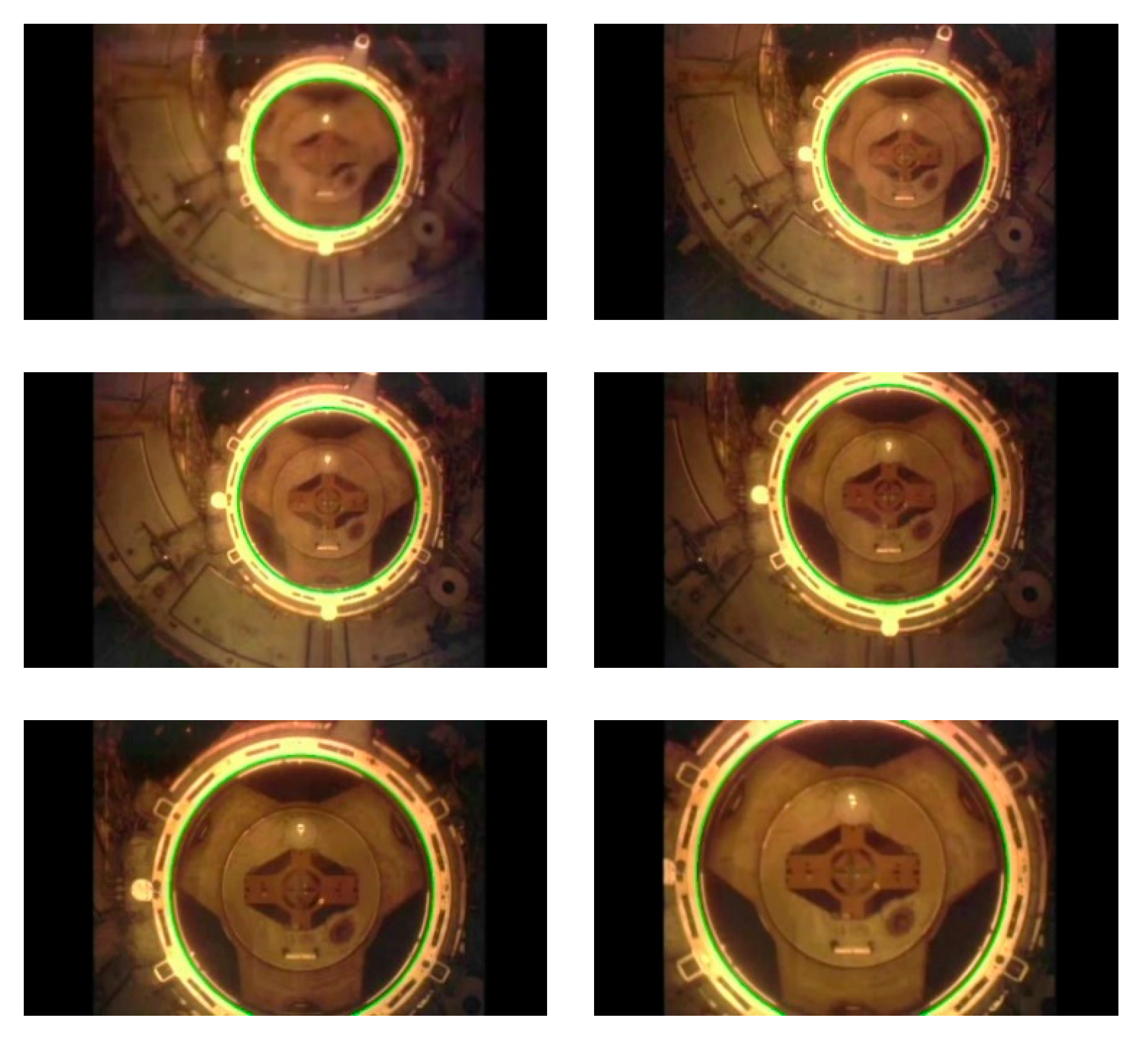
3.1. Test on Real Images
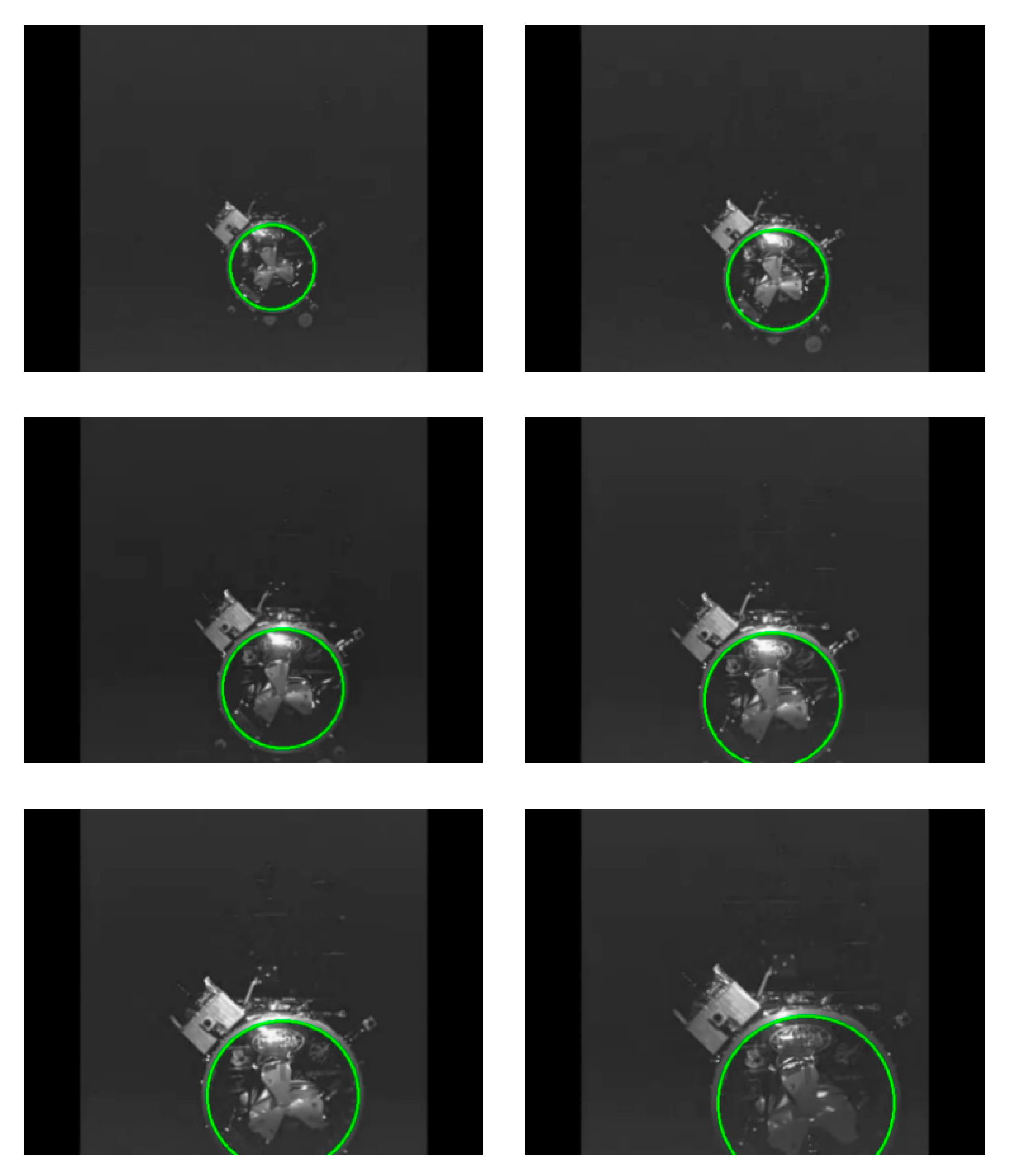
3.2. Video Sequence Test
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Flores-Abad, A.; Ma, O.; Pham, K.; Ulrich, S. A review of space robotics technologies for on-orbit servicing. Prog. Aerosp. Sci. 2014, 68, 1–26. [Google Scholar] [CrossRef]
- Huang, P.; Lu, Y.; Wang, M.; Meng, Z.; Zhang, Y.; Zhang, F. Postcapture Attitude Takeover Control of a Partially Failed Spacecraft with Parametric Uncertainties. IEEE Trans. Autom. Sci. Eng. 2019, 16, 919–930. [Google Scholar] [CrossRef]
- Li, X.; Tai, Y.; Zhang, L.; Li, H.; Li, L. Characterization of dynamic random process using optical vortex metrology. Appl. Phys. B 2014, 116, 901–909. [Google Scholar] [CrossRef]
- Li, X. Digital speckle correlation method based on phase vortices. Opt. Eng. 2012, 51, 077004. [Google Scholar] [CrossRef]
- Sun, Q.; Niu, Z.; Wang, W.; Li, H.; Luo, L.; Lin, X. An Adaptive Real-Time Detection Algorithm for Dim and Small Photoelectric GSO Debris. Sensors 2019, 19, 4026. [Google Scholar] [CrossRef]
- Finkbeiner, J.R.; Dunlap, P.H.; Steinetz, B.M.; Daniels, C.C. Review of seal designs on the Apollo spacecraft. J. Spacecr. Rocket. 2008, 45, 900–910. [Google Scholar] [CrossRef]
- Velasquez, A.F.; Luckett, J.; Napolitano, M.; Marani, G.; Evans, T.; Fravolini, M. Experimental evaluation of a machine vision based pose estimation system for autonomous capture of satellites with interface rings. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013; p. 4758. [Google Scholar]
- Teutsch, C.; Berndt, D.; Trostmann, E.; Weber, M. Real-time detection of elliptic shapes for automated object recognition and object tracking. In Machine Vision Applications in Industrial Inspection XIV; International Society for Optics and Photonics: Bellingham, WA, USA, 2006; Volume 6070, p. 60700J. [Google Scholar]
- Ye, C.; Hong, S.; Tamjidi, A. 6-DOF Pose Estimation of a Robotic Navigation Aid by Tracking Visual and Geometric Features. IEEE Trans. Autom. Sci. Eng. 2015, 12, 1169–1180. [Google Scholar] [CrossRef]
- Kim, J.-U.; Kang, H.-B. A New 3D Object Pose Detection Method Using LIDAR Shape Set. Sensors 2018, 18, 882. [Google Scholar] [CrossRef]
- Kwon, Y.C.; Jang, J.W.; Hwang, Y.; Choi, O. Multi-Cue-Based Circle Detection and Its Application to Robust Extrinsic Calibration of RGB-D Cameras. Sensors 2019, 19, 1539. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, Z.; Dai, F.; Bu, Y.; Wang, H. Monocular Vision-Based Underwater Object Detection. Sensors 2017, 17, 1784. [Google Scholar] [CrossRef]
- Zhang, J.; Qiu, Y.; Duan, X.; Xu, K.; Yang, C. An Improved Robust Method for Pose Estimation of Cylindrical Parts with Interference Features. Sensors 2019, 19, 2234. [Google Scholar] [CrossRef] [PubMed]
- Lu, K.; Li, J.; Zhou, L.; Hu, X.; An, X.; He, H. Generalized Haar Filter-Based Object Detection for Car Sharing Services. IEEE Trans. Autom. Sci. Eng. 2018, 15, 1448–1458. [Google Scholar] [CrossRef]
- Kim, E.; Haseyama, M.; Kitajima, H. Fast and robust ellipse extraction from complicated images. In Proceedings of the IEEE Information Technology and Applications, Bathurst, Australia, 25–28 November 2002. [Google Scholar]
- Libuda, L.; Grothues, I.; Kraiss, K.F. Ellipse detection in digital image data using geometric features. In Advances in Computer Graphics and Computer Vision; Springer: Berlin/Heidelberg, Germany, 2007; pp. 229–239. [Google Scholar]
- Mai, F.; Hung, Y.S.; Zhong, H.; Sze, W.F. A hierarchical approach for fast and robust ellipse extraction. Pattern Recognit. 2008, 41, 2512–2524. [Google Scholar] [CrossRef]
- Chia, A.Y.S.; Rahardja, S.; Rajan, D.; Leung, M.K. A split and merge based ellipse detector with self-correcting capability. IEEE Trans. Image Process. 2011, 20, 1991–2006. [Google Scholar] [CrossRef]
- Prasad, D.K.; Leung, M.K.H.; Cho, S.Y. Edge curvature and convexity based ellipse detection method. Pattern Recognit. 2012, 45, 3204–3221. [Google Scholar] [CrossRef]
- Nguyen, T.M.; Ahuja, S.; Wu, Q.M.J. A real-time ellipse detection based on edge grouping. In Proceedings of the 2009 IEEE International Conference on Systems, Man and Cybernetics, San Antonio, TX, USA, 11–14 October 2009; pp. 3280–3286. [Google Scholar]
- Liu, Z.Y.; Qiao, H. Multiple ellipses detection in noisy environments: A hierarchical approach. Pattern Recognit. 2009, 42, 2421–2433. [Google Scholar] [CrossRef]
- Chen, S.; Xia, R.; Zhao, J.; Chen, Y.; Hu, M. A hybrid method for ellipse detection in industrial images. Pattern Recognit. 2017, 68, 82–98. [Google Scholar] [CrossRef]
- Fornaciari, M.; Prati, A.; Cucchiara, R. A fast and effective ellipse detector for embedded vision applications. Pattern Recognit. 2014, 47, 3693–3708. [Google Scholar] [CrossRef]
- Dong, H.; Sun, G.; Pang, W.C.; Asadi, E.; Prasad, D.K.; Chen, I.M. Fast ellipse detection via gradient information for robotic manipulation of cylindrical objects. IEEE Robot. Autom. Lett. 2018, 3, 2754–2761. [Google Scholar] [CrossRef]
- Fitzgibbon, A.; Pilu, M.; Fisher, R.B. Direct least square fitting of ellipses. IEEE Trans. Pattern Anal. Mach. Intell. 1999, 21, 476–480. [Google Scholar] [CrossRef]
- Chaudhuri, D. A simple least squares method for fitting of ellipses and circles depends on border points of a two-tone image and their 3-D extensions. Pattern Recognit. Lett. 2010, 31, 818–829. [Google Scholar] [CrossRef]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 8, 679–698. [Google Scholar] [CrossRef] [PubMed]
- Whelan, D.A.; Adler, E.A.; Wilson, S.B., III; Roesler, G.M., Jr. DARPA Orbital Express program: Effecting a revolution in space-based systems. In Proceedings of the SPIE—The International Society for Optical Engineering, San Diego, CA, USA, 7 November 2000; p. 4136. [Google Scholar]
- Goodman, J. Louis.History of Space Shuttle Rendezvous and Proximity Operations. J. Spacecr. Rocket. 2006, 43, 944–959. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Steps of the Algorithm | Time (ms) |
|---|---|
| Edge detection | 4.52 |
| Arc detection and classification | 1.98 |
| Arc grouping | 0.09 |
| Parameter estimation | 0.12 |
| Validity verification | 0.24 |
| Total time | 6.96 |
| Steps of the Algorithm | Time (ms) |
|---|---|
| Edge detection | 10.02 |
| Arc detection and classification | 8.55 |
| Arc grouping | 2.72 |
| Parameter estimation | 8.57 |
| Validity verification | 11.93 |
| Total time | 41.79 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Pan, W.; Ma, X. Real-Time Docking Ring Detection Based on the Geometrical Shape for an On-Orbit Spacecraft. Sensors 2019, 19, 5243. https://doi.org/10.3390/s19235243
Zhang L, Pan W, Ma X. Real-Time Docking Ring Detection Based on the Geometrical Shape for an On-Orbit Spacecraft. Sensors. 2019; 19(23):5243. https://doi.org/10.3390/s19235243
Chicago/Turabian StyleZhang, Limin, Wang Pan, and Xianghua Ma. 2019. "Real-Time Docking Ring Detection Based on the Geometrical Shape for an On-Orbit Spacecraft" Sensors 19, no. 23: 5243. https://doi.org/10.3390/s19235243
APA StyleZhang, L., Pan, W., & Ma, X. (2019). Real-Time Docking Ring Detection Based on the Geometrical Shape for an On-Orbit Spacecraft. Sensors, 19(23), 5243. https://doi.org/10.3390/s19235243