Development of an Error Model for a Factory-Calibrated Continuous Glucose Monitoring Sensor with 10-Day Lifetime





Abstract
:1. Introduction
2. Materials and Methods
2.1. Dataset
2.2. Preprocessing
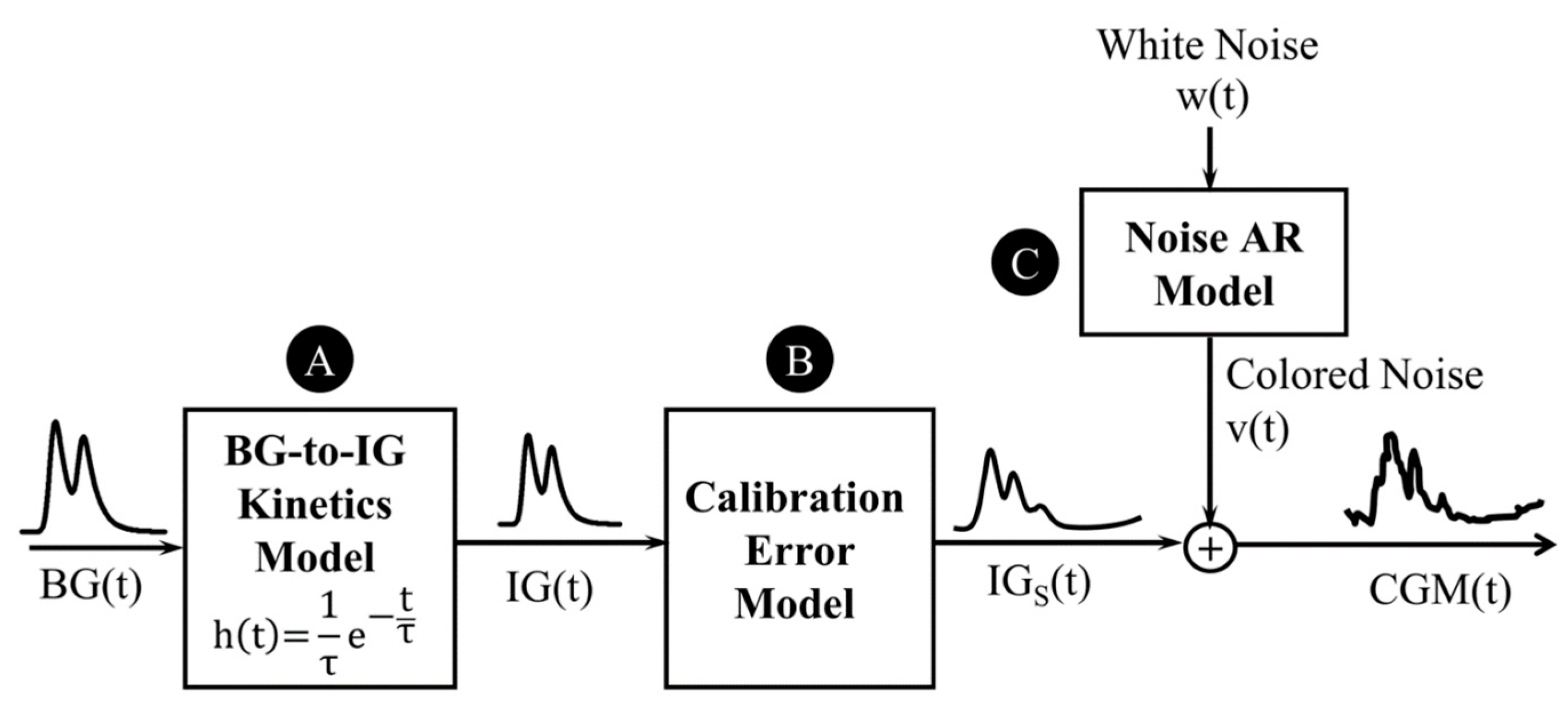
2.3. Proposed CGM Error Model
2.3.1. BG-to-IG Kinetics Model
2.3.2. Calibration Error Model
2.3.3. Random Measurement Noise
2.4. Estimation of Model Parameters
2.4.1. Two-Step Model Identification Procedure
2.4.2. Single-Step Model Identification Procedure
2.4.3. Implementation Details
3. Results
3.1. Model Selection by the Two-Step Identification Procedure
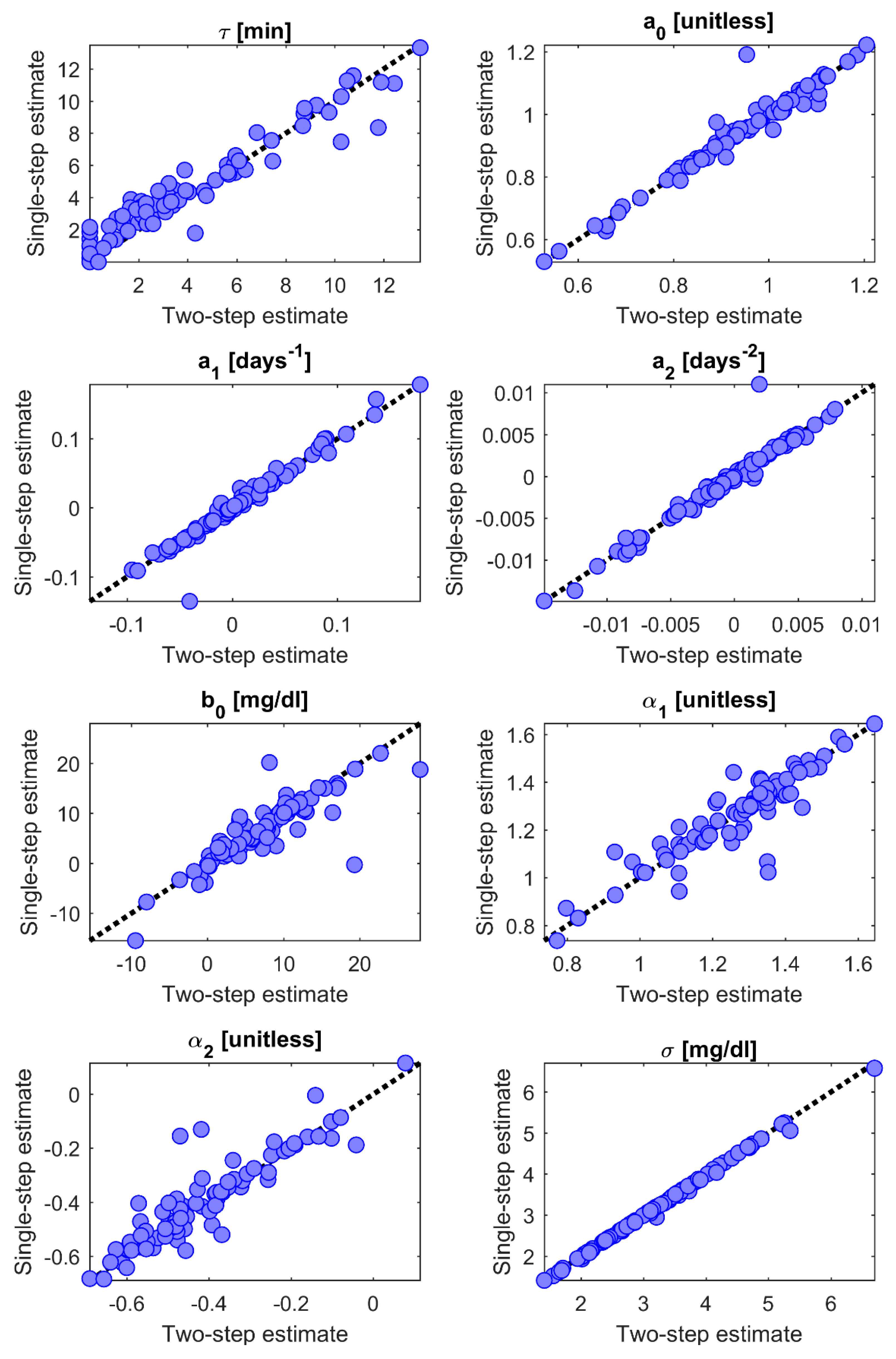
3.2. Two-Step vs. Single-Step Model Identification Procedure
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kirk, J.K.; Stegner, J. Self-monitoring of blood glucose: Practical aspects. J. Diabetes Sci. Technol. 2010, 4, 435–439. [Google Scholar] [CrossRef] [PubMed]
- Cappon, G.; Acciaroli, G.; Vettoretti, M.; Facchinetti, A.; Sparacino, G. Wearable continuous glucose monitoring sensors: A revolution in diabetes treatment. Electronics 2017, 6, 65. [Google Scholar] [CrossRef] [Green Version]
- Klonoff, D.C.; Ahn, D.; Drincic, A. Continuous glucose monitoring: A review of the technology and clinical use. Diabetes Res. Clin. Pract. 2017, 133, 178–192. [Google Scholar] [CrossRef] [PubMed]
- Cappon, G.; Vettoretti, M.; Sparacino, G.; Facchinetti, A. Continuous glucose monitoring sensors for diabetes management: A review of technologies and applications. Diabetes Metab. J. 2019, 43, 383–397. [Google Scholar] [CrossRef]
- Vettoretti, M.; Cappon, G.; Acciaroli, G.; Facchinetti, A.; Sparacino, G. Continuous glucose monitoring: Current use in diabetes management and possible future applications. J. Diabetes Sci. Technol. 2018, 12, 1064–1071. [Google Scholar] [CrossRef]
- Acciaroli, G.; Vettoretti, M.; Facchinetti, A.; Sparacino, G. Calibration of minimally invasive continuous glucose monitoring sensors: State-of-the-art and current perspectives. Biosensors (Basel) 2018, 8, 24. [Google Scholar] [CrossRef] [Green Version]
- Acciaroli, G.; Vettoretti, M.; Facchinetti, A.; Sparacino, G.; Cobelli, C. Reduction of blood glucose measurements to calibrate subcutaneous glucose sensors: A Bayesian multiday framework. IEEE Trans. Biomed. Eng. 2018, 65, 587–595. [Google Scholar] [CrossRef]
- Hoss, U.; Budiman, E.S.; Liu, H.; Christiansen, M.P. Feasibility of factory calibration for subcutaneous glucose sensors in subjects with diabetes. J. Diabetes Sci. Technol. 2014, 8, 89–94. [Google Scholar] [CrossRef] [Green Version]
- Hoss, U.; Budiman, E.S. Factory-calibrated continuous glucose sensors: The science behind the technology. Diabetes Technol. Ther. 2017, 19, S44–S50. [Google Scholar] [CrossRef] [Green Version]
- Forlenza, G.P.; Kushner, T.; Messer, L.H.; Wadwa, R.P.; Sankaranarayanan, S. Factory-calibrated continuous glucose monitoring: How and why it works, and the dangers of reuse beyond approved duration of wear. Diabetes Technol. Ther. 2019, 21, 222–229. [Google Scholar] [CrossRef]
- Staal, O.M.; Hansen, H.M.U.; Christiansen, S.C.; Fougner, A.L.; Carlsen, S.M.; Stavdahl, Ø. Differences between flash continuous glucose monitor and fingerprick measurements. Biosensors (Basel) 2018, 17, 93. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bailey, T.; Bode, B.W.; Christiansen, M.P.; Klaff, L.J.; Alva, S. The performance and usability of a factory-calibrated flash glucose monitoring system. Diabetes Technol. Ther. 2015, 17, 787–794. [Google Scholar] [CrossRef] [PubMed]
- Wadwa, R.P.; Laffel, L.M.; Shah, V.N.; Garg, S.K. Accuracy of a factory-calibrated, real-time continuous glucose monitoring system during 10 days of use in youth and adults with diabetes. Diabetes Technol. Ther. 2018, 20, 395–402. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Welsh, J.B.; Zhang, X.; Puhr, S.A.; Johnson, T.K.; Walker, T.C.; Balo, A.K.; Price, D. Performance of a factory-calibrated, real-time continuous glucose monitoring system in pediatric participants with type 1 diabetes. J. Diabetes Sci. Technol. 2019, 13, 254–258. [Google Scholar] [CrossRef] [PubMed]
- Ward, K.W. A review of the foreign-body response to subcutaneously-implanted devices: The role of macrophages and cytokines in biofouling and fibrosis. J. Diabetes Sci. Technol. 2008, 2, 768–777. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Helton, K.L.; Ratner, B.D.; Wisniewski, N.A. Biomechanics of the sensor-tissue interface-effects of motion, pressure, and design on sensor performance and foreign body response-part II: Examples and application. J. Diabetes Sci. Technol. 2011, 5, 637–656. [Google Scholar] [CrossRef]
- Maahs, D.M.; DeSalvo, D.; Pyle, L.; Ly, T.; Messer, L.; Clinton, P.; Westfall, E.; Wadwa, R.P.; Buckingham, B. Effect of acetaminophen on CGM glucose in an outpatient setting. Diabetes Care 2015, 38, e158–e159. [Google Scholar] [CrossRef] [Green Version]
- Schiavon, M.; Acciaroli, G.; Vettoretti, M.; Giaretta, A.; Visentin, R. A model of acetaminophen pharmacokinetics and its effect on continuous glucose monitoring sensor measurements. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018; Volume 2018, pp. 159–162. [Google Scholar]
- Calhoun, P.; Johnson, T.K.; Hughes, J.; Price, D.; Balo, A.K. Resistance to acetaminophen interference in a novel continuous glucose monitoring system. J. Diabetes Sci. Technol. 2018, 12, 393–396. [Google Scholar] [CrossRef]
- Cobelli, C.; Schiavon, M.; Dalla Man, C.; Basu, A.; Basu, R. Interstitial fluid glucose is not just a shifted-in-time but a distorted mirror of blood glucose: Insight from an in silico study. Diabetes Technol. Ther. 2016, 18, 505–511. [Google Scholar] [CrossRef] [Green Version]
- Viceconti, M.; Cobelli, C.; Haddad, T.; Himes, A.; Kovatchev, B.; Palmer, M. In silico assessment of biomedical products: The conundrum of rare but not so rare events in two case studies. Proc. Inst. Mech. Eng. Part H 2017, 231, 455–466. [Google Scholar] [CrossRef] [Green Version]
- Vettoretti, M.; Facchinetti, A.; Sparacino, G.; Cobelli, C. Type-1 diabetes patient decision simulator for in silico testing safety and effectiveness of insulin treatments. IEEE Trans. Biomed. Eng. 2018, 65, 1281–1290. [Google Scholar] [CrossRef] [PubMed]
- Breton, M.D.; Patek, S.D.; Lv, D.; Schertz, E.; Robic, J.; Pinnata, J.; Kollar, L.; Barnett, C.; Wakeman, C.; Oliveri, M.; et al. Continuous glucose monitoring and insulin informed advisory system with automated titration and dosing of insulin reduces glucose variability in type 1 diabetes mellitus. Diabetes Technol. Ther. 2018, 20, 531–540. [Google Scholar] [CrossRef] [PubMed]
- Camerlingo, N.; Vettoretti, M.; Del Favero, S.; Cappon, G.; Sparacino, G.; Facchinetti, A. A real-time continuous glucose monitoring based algorithm to trigger hypotreatments to prevent/mitigate hypoglycemic events. Diabetes Technol. Ther. 2019, 21, 644–655. [Google Scholar] [CrossRef] [PubMed]
- Pesl, P.; Herrero, P.; Reddy, M.; Xenou, M.; Oliver, N.; Johnston, D.; Toumazou, C.; Georgiou, P. An advanced bolus calculator for type 1 diabetes: System architecture and usability results. IEEE J. Biomed. Health Inform. 2016, 20, 11–17. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cappon, G.; Vettoretti, M.; Marturano, F.; Facchinetti, A.; Sparacino, G. A Neural-network-based approach to personalize insulin bolus calculation using continuous glucose monitoring. J. Diabetes Sci. Technol. 2018, 12, 265–272. [Google Scholar] [CrossRef]
- Cappon, G.; Marturano, F.; Vettoretti, M.; Facchinetti, A.; Sparacino, G. In silico assessment of literature insulin bolus calculation methods accounting for glucose rate of change. J. Diabetes Sci. Technol. 2019, 13, 103–110. [Google Scholar] [CrossRef]
- Vettoretti, M.; Facchinetti, A. Combining continuous glucose monitoring and insulin pumps to automatically tune the basal insulin infusion in diabetes therapy: A review. Biomed. Eng. Online 2019, 18, 37. [Google Scholar] [CrossRef] [Green Version]
- Davis, T.; Salahi, A.; Welsh, J.B.; Bailey, T.S. Automated insulin pump suspension for hypoglycaemia mitigation: Development, implementation and implications. Diabetes Obes. Metab. 2015, 17, 1126–1132. [Google Scholar] [CrossRef]
- Steineck, I.; Ranjan, A.; Nørgaard, K.; Schmidt, S. Sensor-augmented insulin pumps and hypoglycemia prevention in type 1 diabetes. J. Diabetes Sci. Technol. 2017, 11, 50–58. [Google Scholar] [CrossRef]
- Thabit, H.; Hovorka, R. Coming of age: The artificial pancreas for type 1 diabetes. Diabetologia 2016, 59, 1795–1805. [Google Scholar] [CrossRef] [Green Version]
- Dadlani, V.; Pinsker, J.E.; Dassau, E.; Kudva, Y.C. Advances in closed-loop insulin delivery systems in patients with type 1 diabetes. Curr. Diabetes Rep. 2018, 18, 88. [Google Scholar] [CrossRef] [PubMed]
- Bertachi, A.; Ramkissoon, C.M.; Bondia, J.; Vehí, J. Automated blood glucose control in type 1 diabetes: A review of progress and challenges. Endocrinol. Diabetes Nutr. 2018, 65, 172–181. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Breton, M.; Kovatchev, B. Analysis, modelling and simulation of the accuracy of continuous glucose sensors. J. Diabetes Sci. Technol. 2008, 2, 853–862. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lunn, D.J.; Wei, C.; Hovorka, R. Fitting dynamic models with forcing functions: Application to continuous glucose monitoring in insulin therapy. Stat. Med. 2011, 30, 2234–2250. [Google Scholar] [CrossRef] [Green Version]
- Facchinetti, A.; Del Favero, S.; Sparacino, G.; Castle, J.R.; Ward, W.K.; Cobelli, C. Modeling the glucose sensor error. IEEE Trans. Biomed. Eng. 2014, 61, 620–629. [Google Scholar] [CrossRef] [PubMed]
- Facchinetti, A.; Del Favero, S.; Sparacino, G.; Cobelli, C. Model of glucose sensor error components: Identification and assessment for new Dexcom G4 generation devices. Med. Biol. Eng. Comput. 2015, 53, 1259–1269. [Google Scholar] [CrossRef] [PubMed]
- Biagi, L.; Ramkissoon, C.M.; Facchinetti, A.; Leal, Y.; Vehi, J. Modeling the error of the Medtronic Paradigm Veo Enlite glucose sensor. Sensors (Basel) 2017, 12, 1361. [Google Scholar] [CrossRef] [Green Version]
- Vettoretti, M.; Del Favero, S.; Sparacino, G.; Facchinetti, A. Modeling the error of factory calibrated continuous glucose monitoring sensors: Application to Dexcom G6 sensor data. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; Volume 2019, pp. 750–753. [Google Scholar]
- Tikhonov, A.N. Solution of incorrectly formulated problems and the regularization method. Sov. Math. Dokl. 1963, 4, 1035–1038. [Google Scholar]
- De Nicolao, G.; Sparacino, G.; Cobelli, C. Nonparametric input estimation in physiological systems: Problems, methods, and case studies. Automatica 1997, 33, 851–870. [Google Scholar] [CrossRef]
- Rebin, K.; Steil, G.M.; van Antwerp, W.P.; Mastrototaro, J.J. Subcutaneous glucose predicts plasma glucose independent of insulin: Implications for continuous monitoring. Am. J. Physiol. Endocrinol. Metab. 1999, 277, E561–E571. [Google Scholar] [CrossRef]
- Schiavon, M.; Dalla Man, C.; Dube, S.; Slama, M.; Kudva, Y.C.; Peyser, T.; Basu, A.; Basu, R.; Cobelli, C. Modeling plasma-to-interstitium glucose kinetics from multitracer plasma and microdialysis data. Diabetes Technol. Ther. 2015, 11, 825–831. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Facchinetti, A.; Del Favero, S.; Sparacino, G.; Cobelli, C. Modeling transient disconnections and compression artifacts of continuous glucose sensors. Diabetes Technol. Ther. 2016, 18, 264–272. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Two-Step Identification | Single-Step Identification | ||||
|---|---|---|---|---|---|---|
| Median [IQR] | CV < 10% | CV < 30% | Median [IQR] | CV < 10% | CV < 30% | |
| τ [min] | 3.10 [1.66–5.91] | 86% | 87% | 3.78 [2.39–5.96] | 85% | 94% |
| a0 [unitless] | 0.95 [0.87–1.03] | 100% | 100% | 0.95 [0.86–1.03] | 99% | 99% |
| a1 [days−1] | 0.002 [−0.034–0.027] | 92% | 99% | 0.004 [−0.035–0.031] | 41% | 77% |
| a2 [days−2] | 0.000 [−0.003–0.003] | 94% | 95% | 0.000 [−0.003–0.003] | 46% | 78% |
| b0 [mg/dL] | 7.30 [2.67–10.67] | 90% | 94% | 6.35 [2.37–10.51] | 54% | 81% |
| α1 [unitless] | 1.3 [1.17–1.37] | 100% | 100% | 1.30 [1.15–1.37] | 99% | 99% |
| α2 [unitless] | −0.46 [−0.53–−0.33] | 30% | 90% | −0.42 [−0.53–−0.30] | 95% | 97% |
| σ [mg/dL] | 3.20 [2.48–3.88] | - | - | 3.19 [2.47–3.85] | - | - |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vettoretti, M.; Battocchio, C.; Sparacino, G.; Facchinetti, A. Development of an Error Model for a Factory-Calibrated Continuous Glucose Monitoring Sensor with 10-Day Lifetime. Sensors 2019, 19, 5320. https://doi.org/10.3390/s19235320
Vettoretti M, Battocchio C, Sparacino G, Facchinetti A. Development of an Error Model for a Factory-Calibrated Continuous Glucose Monitoring Sensor with 10-Day Lifetime. Sensors. 2019; 19(23):5320. https://doi.org/10.3390/s19235320
Chicago/Turabian StyleVettoretti, Martina, Cristina Battocchio, Giovanni Sparacino, and Andrea Facchinetti. 2019. "Development of an Error Model for a Factory-Calibrated Continuous Glucose Monitoring Sensor with 10-Day Lifetime" Sensors 19, no. 23: 5320. https://doi.org/10.3390/s19235320
APA StyleVettoretti, M., Battocchio, C., Sparacino, G., & Facchinetti, A. (2019). Development of an Error Model for a Factory-Calibrated Continuous Glucose Monitoring Sensor with 10-Day Lifetime. Sensors, 19(23), 5320. https://doi.org/10.3390/s19235320