Self-Organized Proactive Routing Protocol for Non-Uniformly Deployed Underwater Networks



Abstract
:1. Introduction
2. Related Work
2.1. Protocols Based on RSS
2.2. Location-Based Protocols
2.3. Opportunistic Protocols
- In location-based routing protocols:
- The sensor nodes determine their position with respect to the GW, which in turn determines its position via GNSS. Due to the varying speed of acoustic waves and the mobility of the nodes, the probability of error in position determination is quite high;
- The position determination by the depth sensors increases the power consumption and cost of the sensor nodes;
- Time synchronization is required;
- Additional devices like a depth sensor and array of antennas (for the angle of arrival method [1]) are required;
- Centralized routing path formation control;
- The required computational processing delay and power are high;
- The routing protocols are reactive.
3. Overview of the SPRINT Protocol
4. Route Formation Process
4.1. Forwarding the RR Packet
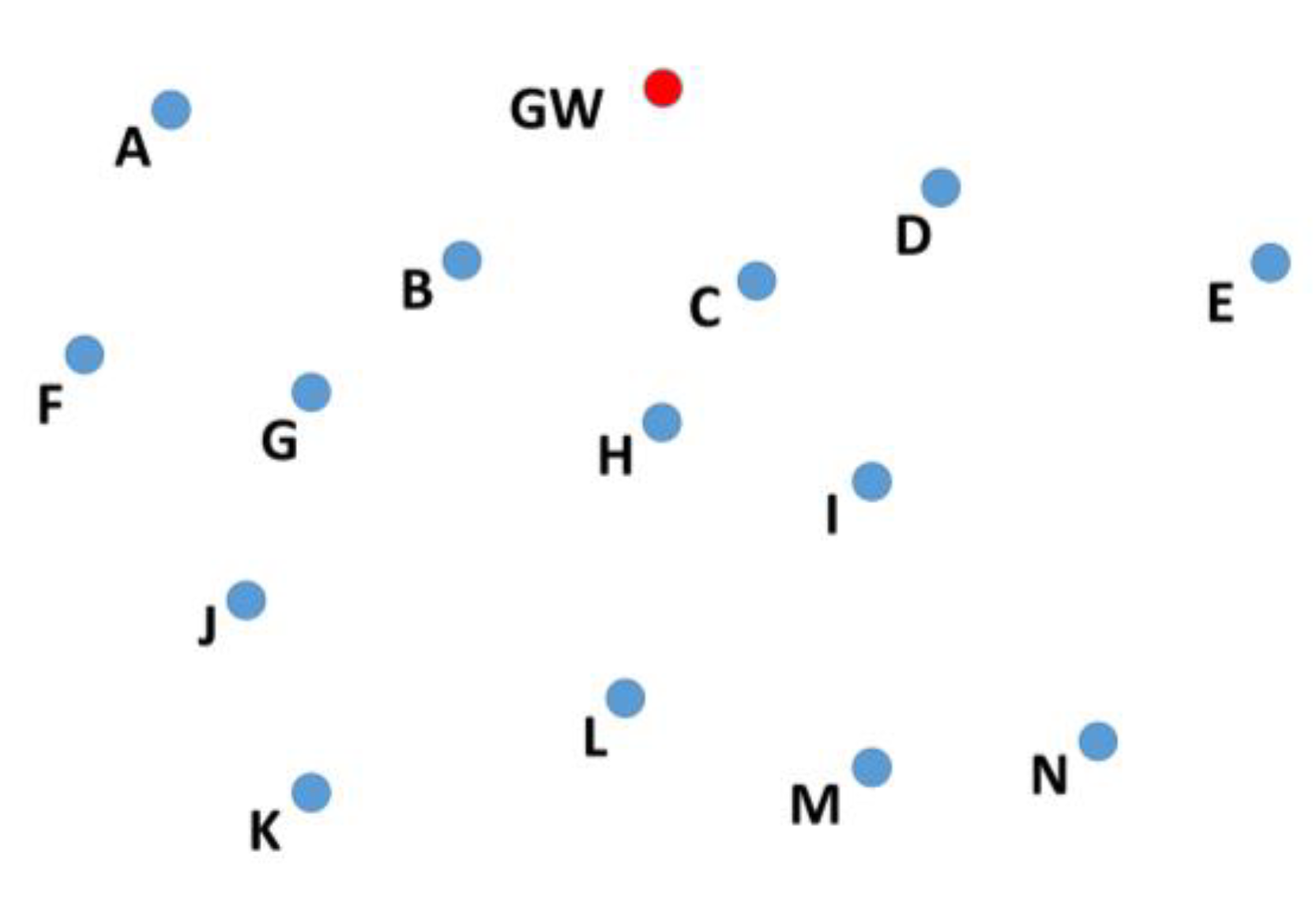
- GW broadcasts an RR packet three times with its node ID to ensure that all the neighbor nodes have received it;
- The nodes that receive the RR packet form the path with the GW without considering RSS, because they are at one hop distance from the GW;
- The nodes that receive the RR packet broadcast an RR packet at randomly selected time slots to avoid collision;
- A node might receive the RR packet from only one node or multiple nodes:
- 4.1.
- If it receives the RR packet from just one node, then it forms its path to the GW through that node;
- 4.2.
- If it receives the RR from multiple nodes, then it compares the RSS values, hop counts to the GW, and number of neighbors of the candidate nodes. It will select the forwarding node according to the weights given to RSS, the least hop count, and least number of neighbors to form the path;
- Once the forwarding node is selected, the acknowledgement of the RR packet (RR_ACK) is sent. An RR sending node receives acknowledgment from all nodes which are within its transmission range;
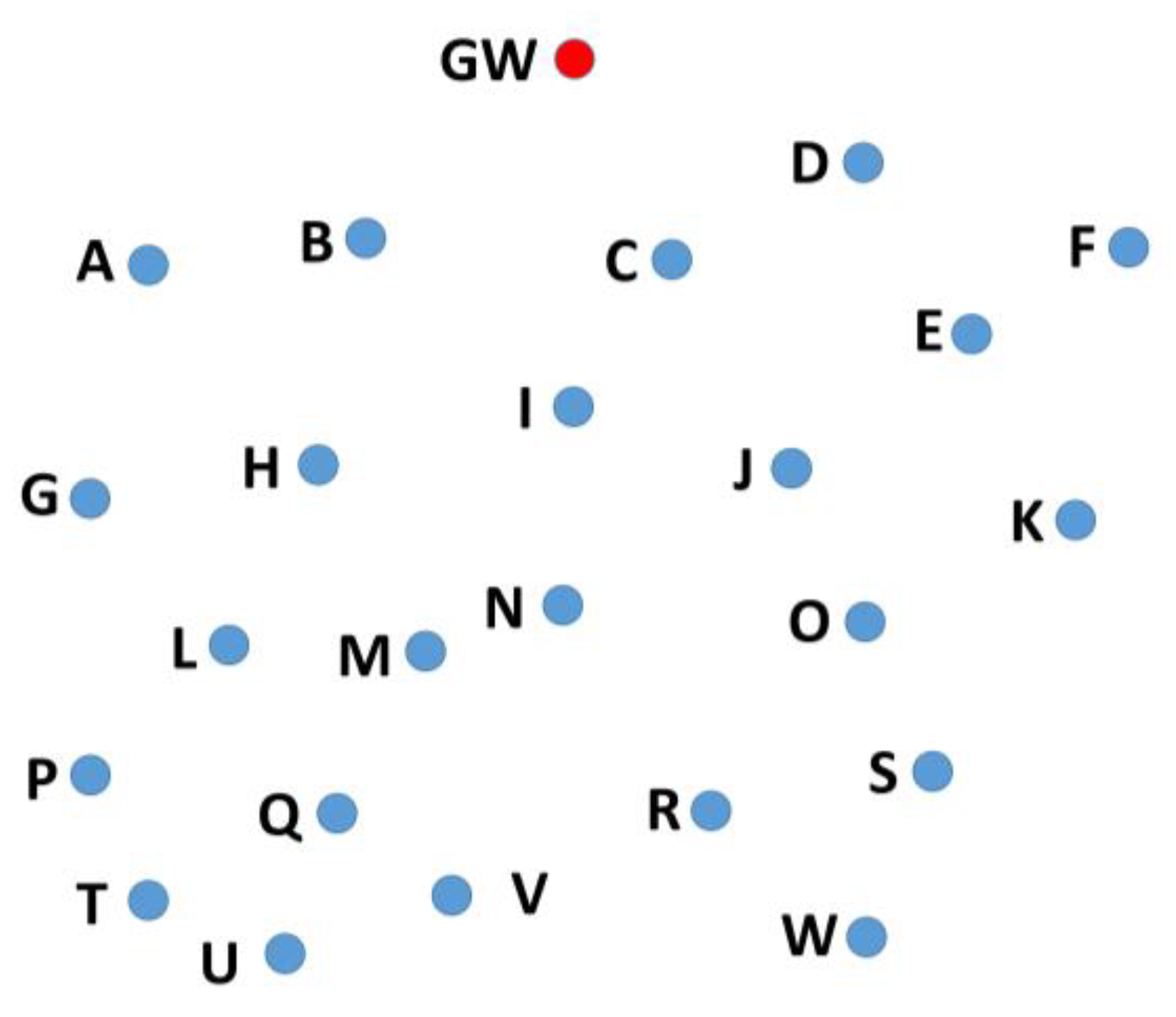
- Steps 1–5 (broadcast of RR packet) are repeated by all the nodes that received the RR packet earlier, until all the nodes in the network have received the RR packet.
4.2. Selection Criteria
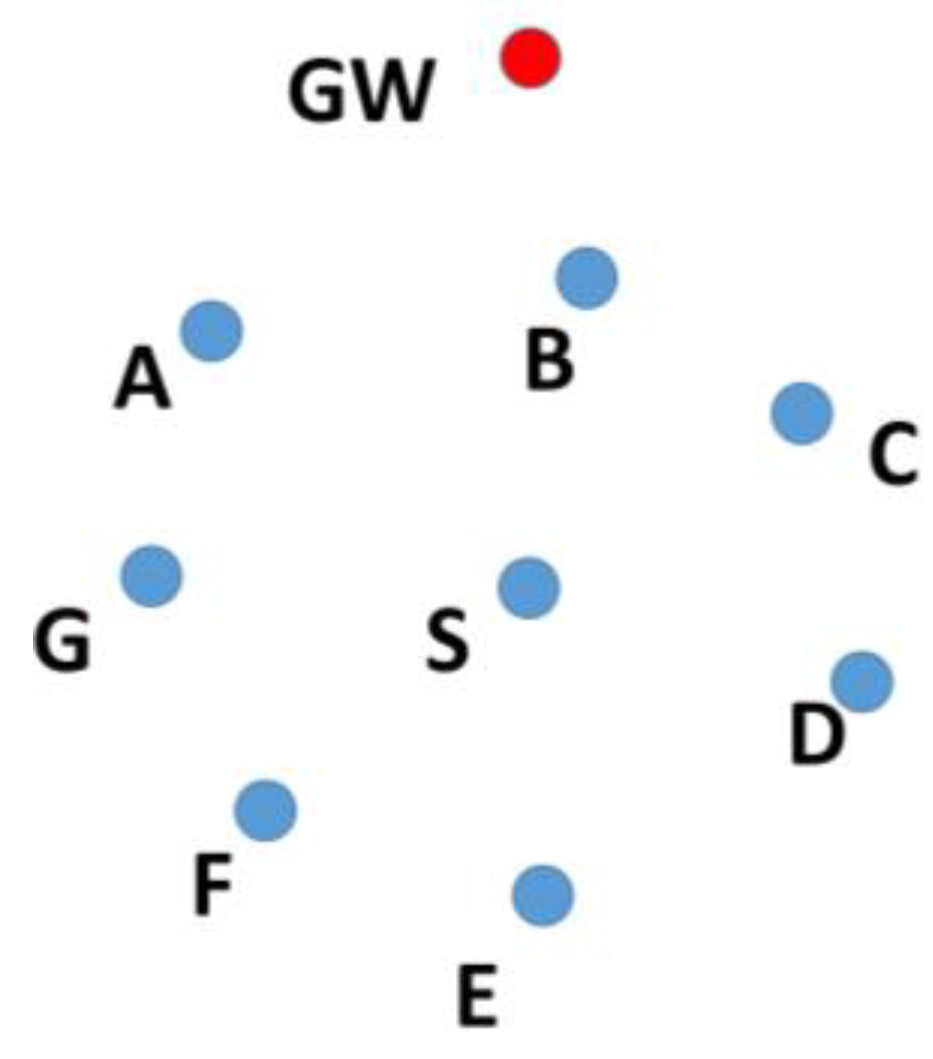
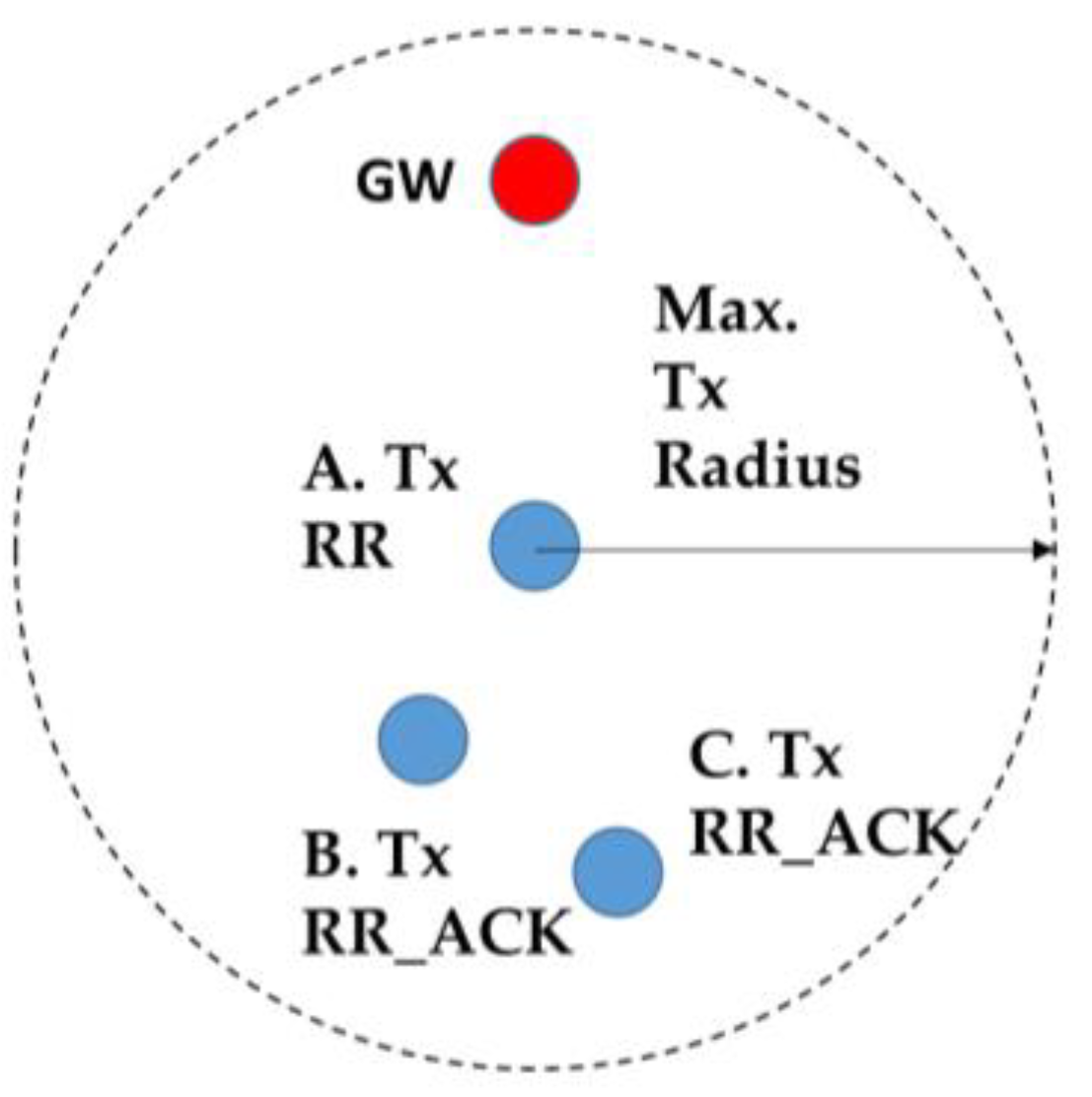
- Suppose node A (Figure 8) broadcasts the RR packets which are received by nodes B and C, because they are in the transmission range of node A;
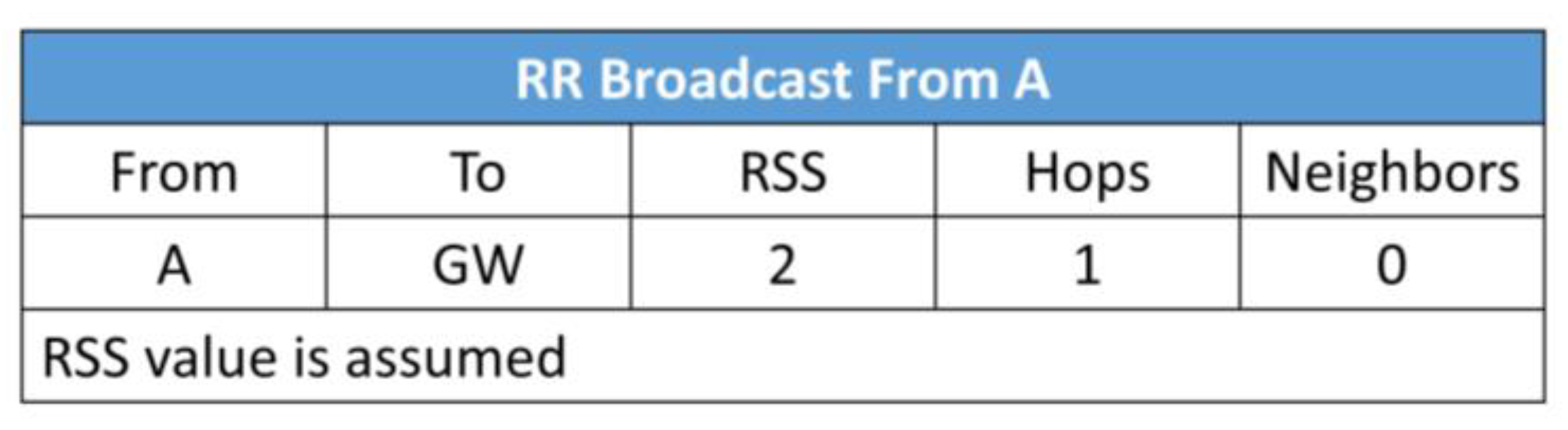
- The information contained in the RR packet is shown in Figure 9. The RSS between node A and the gateway (GW) is 2 (assumed). Node A is one hop away from GW and A has no knowledge about its neighbors so far. Node A learns about its neighbors when it broadcasts the RR packet and receives the acknowledgement(s);
- When nodes B and C send the acknowledgement (RR_ACK), node A learns that it has become part of the routing path of nodes B and C;
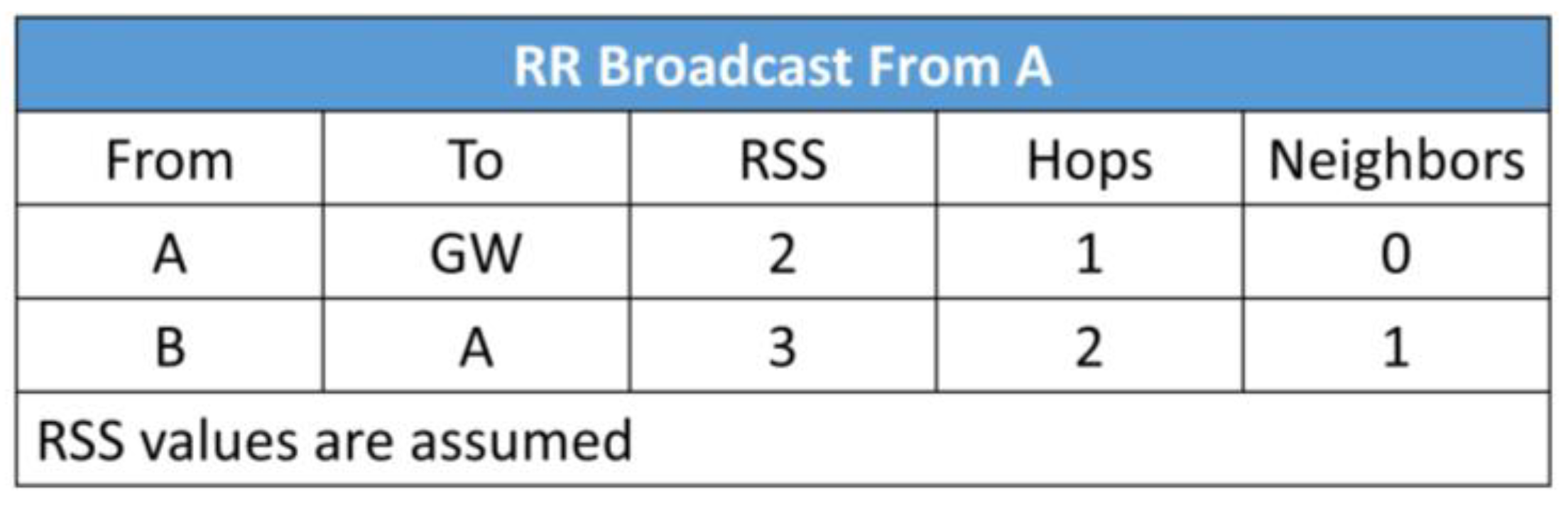
- Now, either B or C broadcasts the RR packet first (depends on the selected time slot);
- Let us assume that node B will send the RR packet first. When B broadcasts RR packet it contains the information of signal strength between A and itself, number of hops it is away from the gateway through node A, and the number of neighbors (see Figure 10);
- At this point, C compares the RSS, the least number of hops, and the least number of neighbors to form the routing path with A or B;
- Node C can choose its path to the gateway by two routes: C → A or C → B → A:
- 7.1.
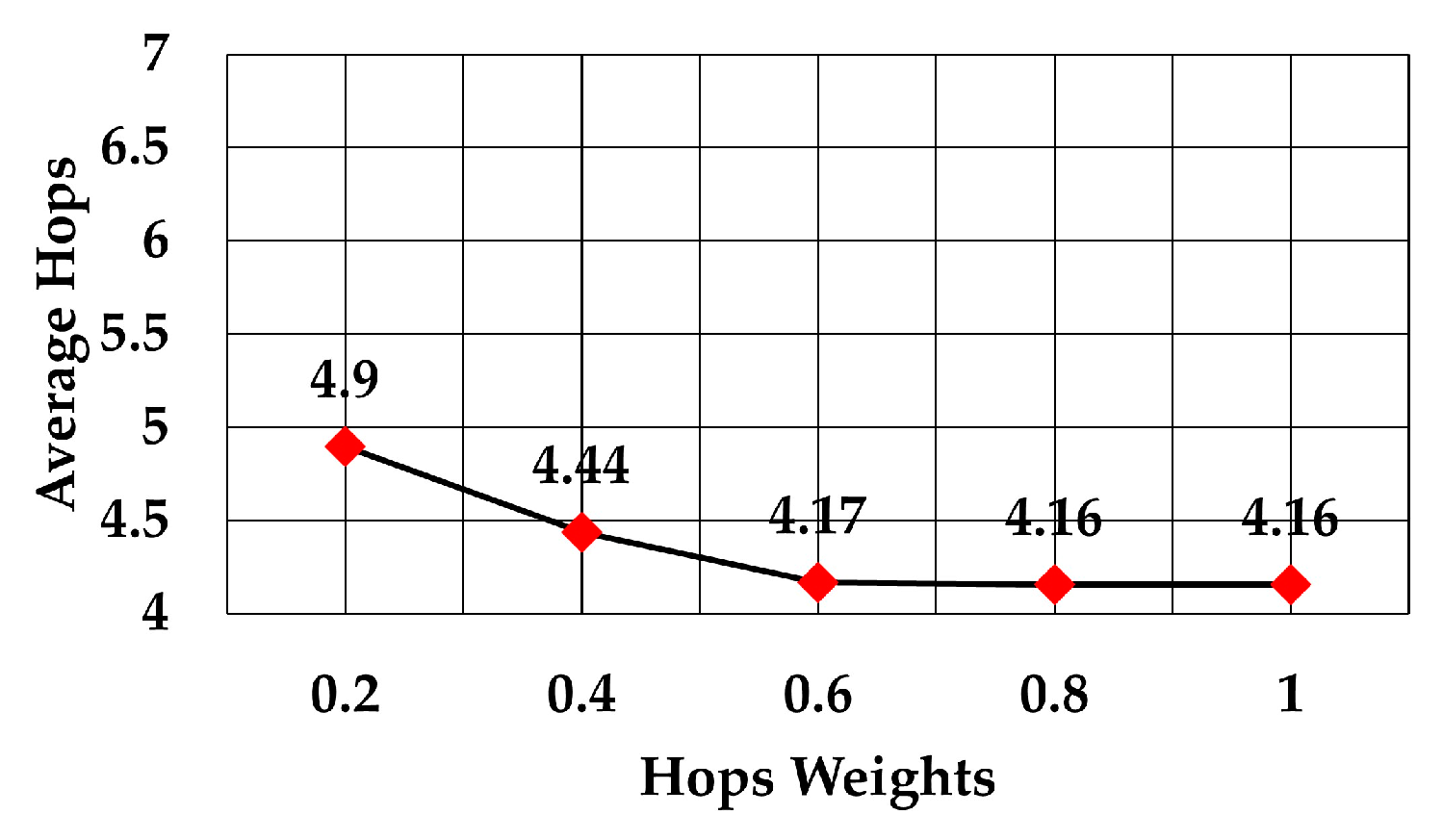
- If the weight coefficient defined for the least number of hops has a higher value than the other two weight coefficients (for RSS and number of hops), then node C will select node A as the forwarding node for minimum delay in the packet delivery;
- 7.2.
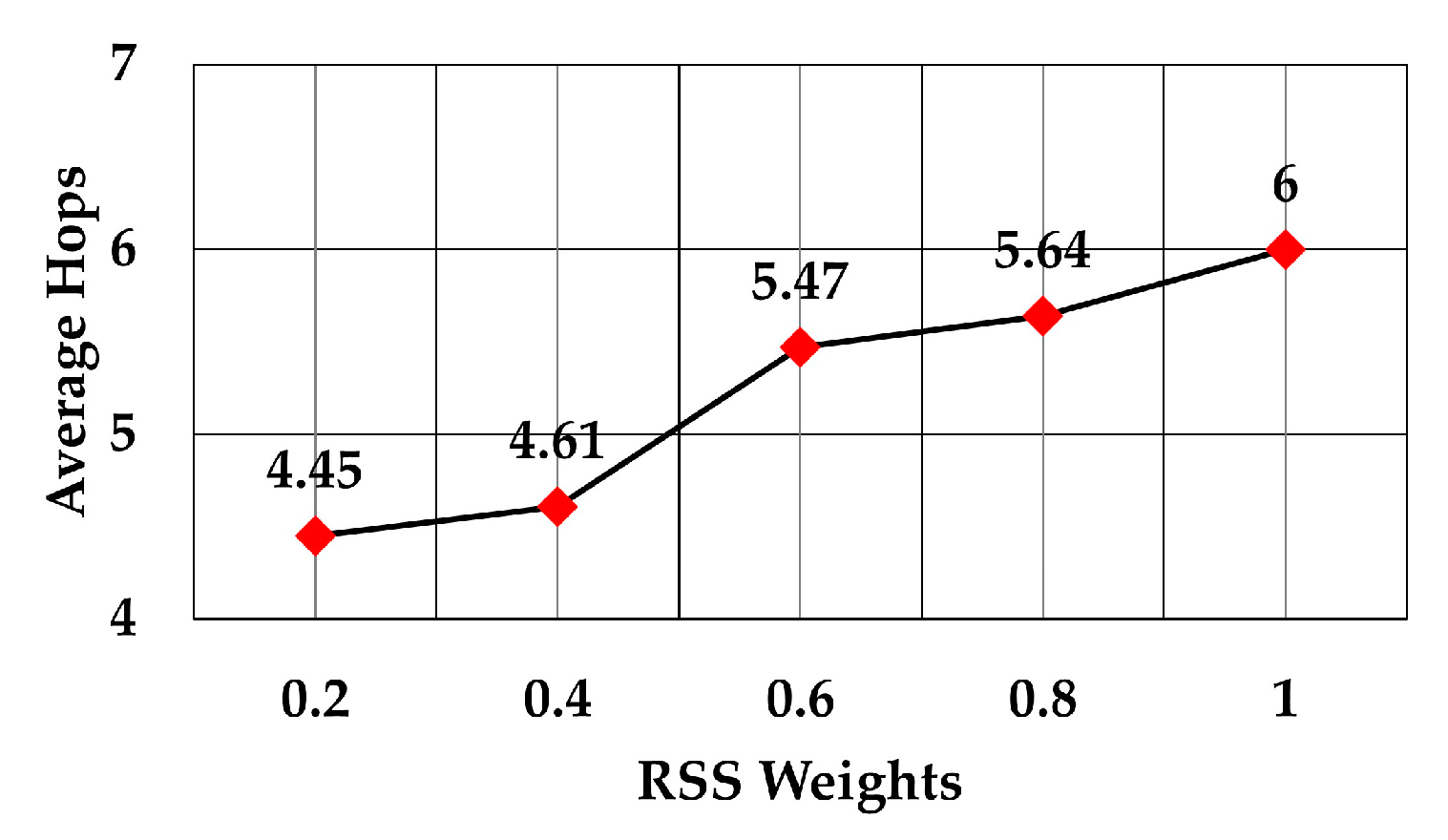
- If the weight coefficient for RSS has a higher value, then C will select B as the forwarding node to save energy.
5. Mathematical Analysis
6. Packet Header Format
7. Computer Simulation Results
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hosseini, M.; Chizari, H.; Soon, C.K.; Budiarto, R. RSS-based distance measurement in Underwater Acoustic Sensor Networks: An application of the Lambert W function. In Proceedings of the 2010 4th International Conference on Signal Processing and Communication Systems, Gold Coast, Australia, 13–15 December 2010; pp. 1–4. [Google Scholar]
- KM, D.R.; Yum, S.-H.; Ko, E.; Shin, S.-Y.; Namgung, J.-I.; Park, S.-H. Multi-Media and Multi-Band Based Adaptation Layer Techniques for Underwater Sensor Networks. Appl. Sci. 2019, 9, 3187. [Google Scholar]
- Yan, H.; Shi, Z.J.; Cui, J.-H. DBR: Depth-Based Routing for Underwater Sensor Networks. In NETWORKING 2008 Ad Hoc and Sensor Networks, Wireless Networks, Next Generation Internet; Das, A., Pung, H.K., Lee, F.B.S., Wong, L.W.C., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; Volume 4982, pp. 72–86. ISBN 978-3-540-79548-3. [Google Scholar]
- Du, X.; Huang, K.; Lan, S.; Feng, Z.; Liu, F. LB-AGR: Level-based adaptive geo-routing for underwater sensor network. J. China Univ. Posts Telecommun. 2014, 21, 54–59. [Google Scholar] [CrossRef]
- Xie, P.; Cui, J.-H.; Lao, L. VBF: Vector-Based Forwarding Protocol for Underwater Sensor Networks. In International Conference on Research in Networking; Boavida, F., Plagemann, T., Stiller, B., Westphal, C., Monteiro, E., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; Volume 3976, pp. 1216–1221. ISBN 978-3-540-34192-5. [Google Scholar]
- Climent, S.; Sanchez, A.; Capella, J.V.; Meratnia, N.; Serrano, J.J. Underwater Acoustic Wireless Sensor Networks: Advances and Future Trends in Physical, MAC and Routing Layers. Sensors 2014, 14, 795–833. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Yu, M.; Wang, X.; Liu, Y.; Wei, X.; Cui, J. RECRP: An Underwater Reliable Energy-Efficient Cross-Layer Routing Protocol. Sensors 2018, 18, 4148. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xie, G.; Gibson, J. A Networking Protocol for Underwater Acoustic Networks; Technical Report TR-CS-00-02; Department of Computer Science, Naval Postgraduate School: Monterey, CA, USA, 2000. [Google Scholar]
- Xie, P.; Zhou, Z.; Nicolaou, N.; See, A.; Cui, J.-H.; Shi, Z. Efficient Vector-Based Forwarding for Underwater Sensor Networks. J. Wirel. Commun. Netw. 2010, 2010, 195910. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wahid, A.; Lee, S.; Jeong, H.-J.; Kim, D. EEDBR: Energy-Efficient Depth-Based Routing Protocol for Underwater Wireless Sensor Networks. In Proceedings of the Advanced Computer Science and Information Technology; Kim, T., Adeli, H., Robles, R.J., Balitanas, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 223–234. [Google Scholar]
- Noh, Y.; Lee, U.; Lee, S.; Wang, P.; Vieira, L.F.M.; Cui, J.; Gerla, M.; Kim, K. HydroCast: Pressure Routing for Underwater Sensor Networks. IEEE Trans. Veh. Technol. 2016, 65, 333–347. [Google Scholar] [CrossRef]
- Lee, S.; Bhattacharjee, B.; Banerjee, S. Efficient Geographic Routing in Multihop Wireless Networks. In Proceedings of the 6th ACM International Symposium on Mobile Ad Hoc Networking and Computing; ACM: New York, NY, USA, 2005; pp. 230–241. [Google Scholar]
- Noh, Y.; Lee, U.; Wang, P.; Choi, B.S.C.; Gerla, M. VAPR: Void-Aware Pressure Routing for Underwater Sensor Networks. IEEE Trans. Mob. Comput. 2013, 12, 895–908. [Google Scholar] [CrossRef]
- Yang, C.-H.; Ssu, K.-F. An energy-efficient routing protocol in underwater sensor networks. In Proceedings of the 2008 3rd International Conference on Sensing Technology, Tainan, Taiwan, 30 November–3 December 2008; pp. 114–118. [Google Scholar]
- Hung, M.C.-C.; Lin, K.C.-J.; Chou, C.-F.; Hsu, C.-C. EFFORT: Energy-efficient opportunistic routing technology in wireless sensor networks. Wirel. Commun. Mob. Comput. 2013, 13, 760–773. [Google Scholar] [CrossRef]
- Jin, Z.; Ding, M.; Li, S. An Energy-Efficient and Obstacle-Avoiding Routing Protocol for Underwater Acoustic Sensor Networks. Sensors 2018, 18, 4168. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ahmed, F.; Wadud, Z.; Javaid, N.; Alrajeh, N.; Alabed, M.S.; Qasim, U. Mobile Sinks Assisted Geographic and Opportunistic Routing Based Interference Avoidance for Underwater Wireless Sensor Network. Sensors 2018, 18, 1062. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bai, W.; Wang, H.; He, K.; Zhao, R. Path Diversity Improved Opportunistic Routing for Underwater Sensor Networks. Sensors 2018, 18, 1293. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Stojanovic, M. On the Relationship Between Capacity and Distance in an Underwater Acoustic Communication Channel. In Proceedings of the 1st ACM International Workshop on Underwater Networks; ACM: New York, NY, USA, 2006; pp. 41–47. [Google Scholar]
- Stojanovic, M.; Preisig, J. Underwater acoustic communication channels: Propagation models and statistical characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Brekhovskikh, L.M.; Lysanov, Y.P. Fundamentals of Ocean Acoustics, 3rd ed.; (AIP Series in Modern Acoustics and Signal Processing); Springer: New York, NY, USA, 2003; ISBN 978-0-387-95467-7. [Google Scholar]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Packet Name | Description | Code |
|---|---|---|
| RR | Route Request | 0011001 |
| RR_ACK | Route Request Acknowledgement | 1100110 |
| RR_RSP | RR Response | 1001010 |
| Symbol | Description |
|---|---|
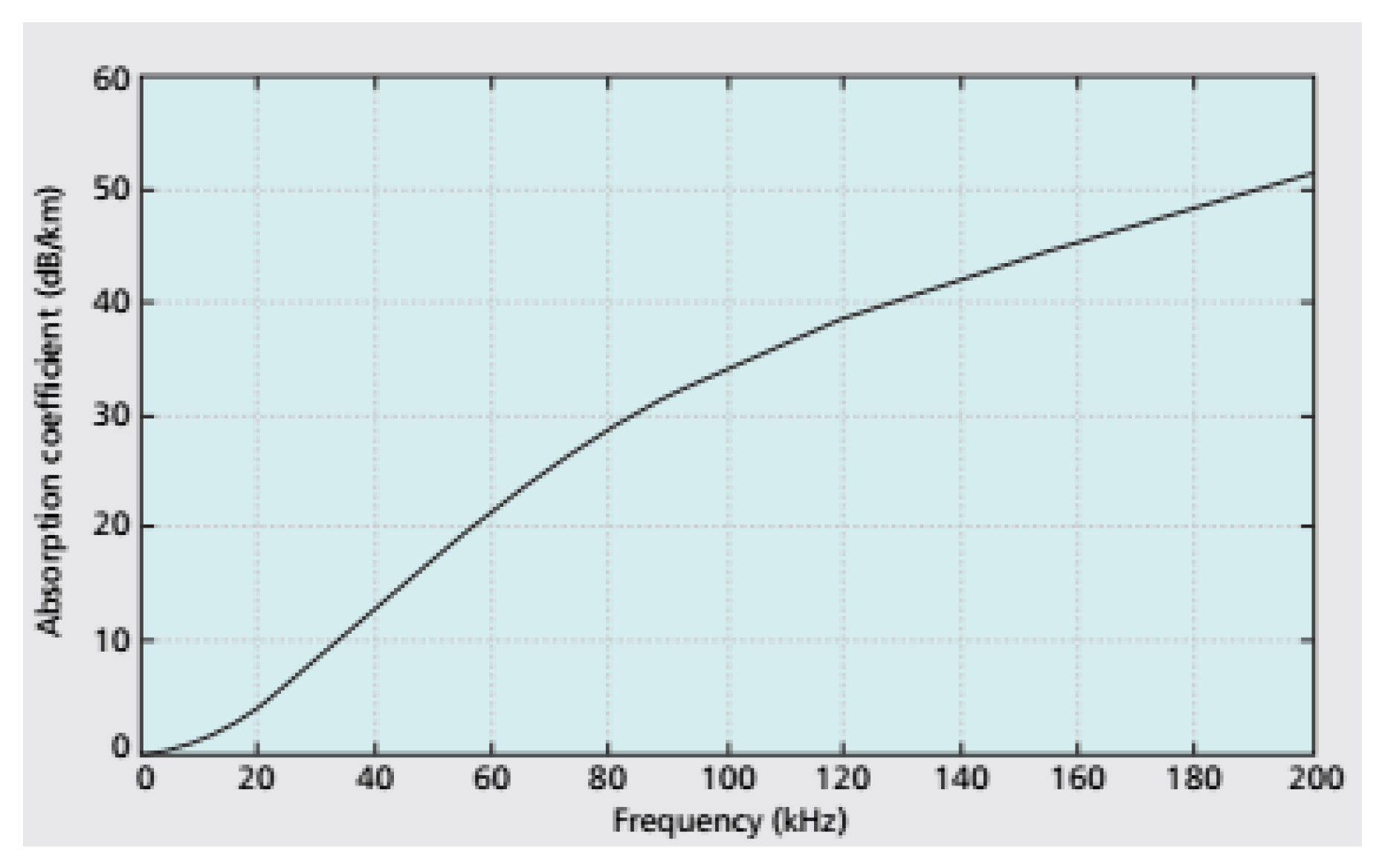
| Absorption coefficient (dB/km) | |
| f | Frequency (kHz) |
| ghwt | Number of neighbors weight |
| HP | Normalized number of hops multiplied by the weight |
| hpwt | Number of hops weight |
| NB | Normalized number of neighbors |
| NG | Normalized number of neighbors multiplied by the weight |
| NH | Normalized number of hops |
| NS | Normalized number of RSS |
| R | Distance between the nodes |
| RS | Normalized RSS multiplied by the weight |
| selnode | Selected node |
| Ss | RSS (dB) |
| sswt | RSS weight |
| TL | Transmission loss (dB) |
| Y | Node selection equation |
| Parameter | Value | Unit |
|---|---|---|
| Sound speed | 1500 | m/s |
| Data rate | 5000 | bits/s |
| Frequency | 48 | kHz |
| Header size | 30 | Bits |
| Transmission power | 18 | Watts |
| Nodes | 100 | nodes |
| Area | 4 × 4 | km2 |
| Depth | 4 | km |
| Nodes density | 1.56 | nodes/km3 |
| Number of runs | 100 | each |
| Weights | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RSS | 0.2 | 0.4 | 0.6 | 0.8 | 1 | 0.4 | 0.3 | 0.2 | 0.1 | 0 | 0.4 | 0.3 | 0.2 | 0.1 | 0 |
| Hops | 0.4 | 0.3 | 0.2 | 0.1 | 0 | 0.2 | 0.4 | 0.6 | 0.8 | 1 | 0.4 | 0.3 | 0.2 | 0.1 | 0 |
| Neighbors | 0.4 | 0.3 | 0.2 | 0.1 | 0 | 0.4 | 0.3 | 0.2 | 0.1 | 0 | 0.2 | 0.4 | 0.6 | 0.8 | 1 |
| S. No. | Nodes | Nodes Density | Tx. Ranges (km) |
|---|---|---|---|
| 1 | 100 | 10 | 5, 6, 7, 8 |
| 2 | 200 | 5 | 4, 5, 6 |
| 3 | 300 | 3.33 | 3, 4, 5 |
| 4 | 400 | 2.5 | 2, 3, 4 |
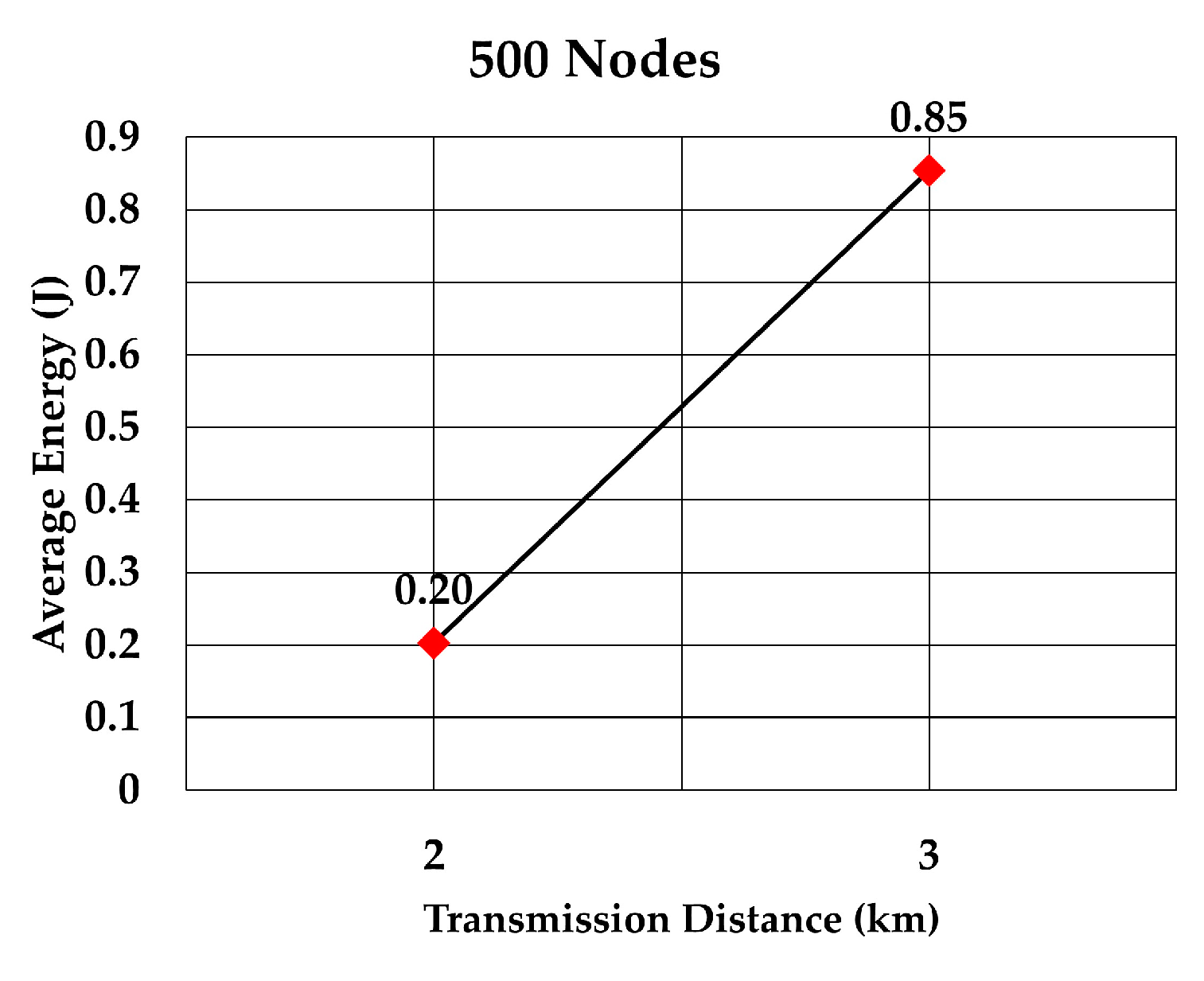
| 5 | 500 | 2 | 2, 3 |
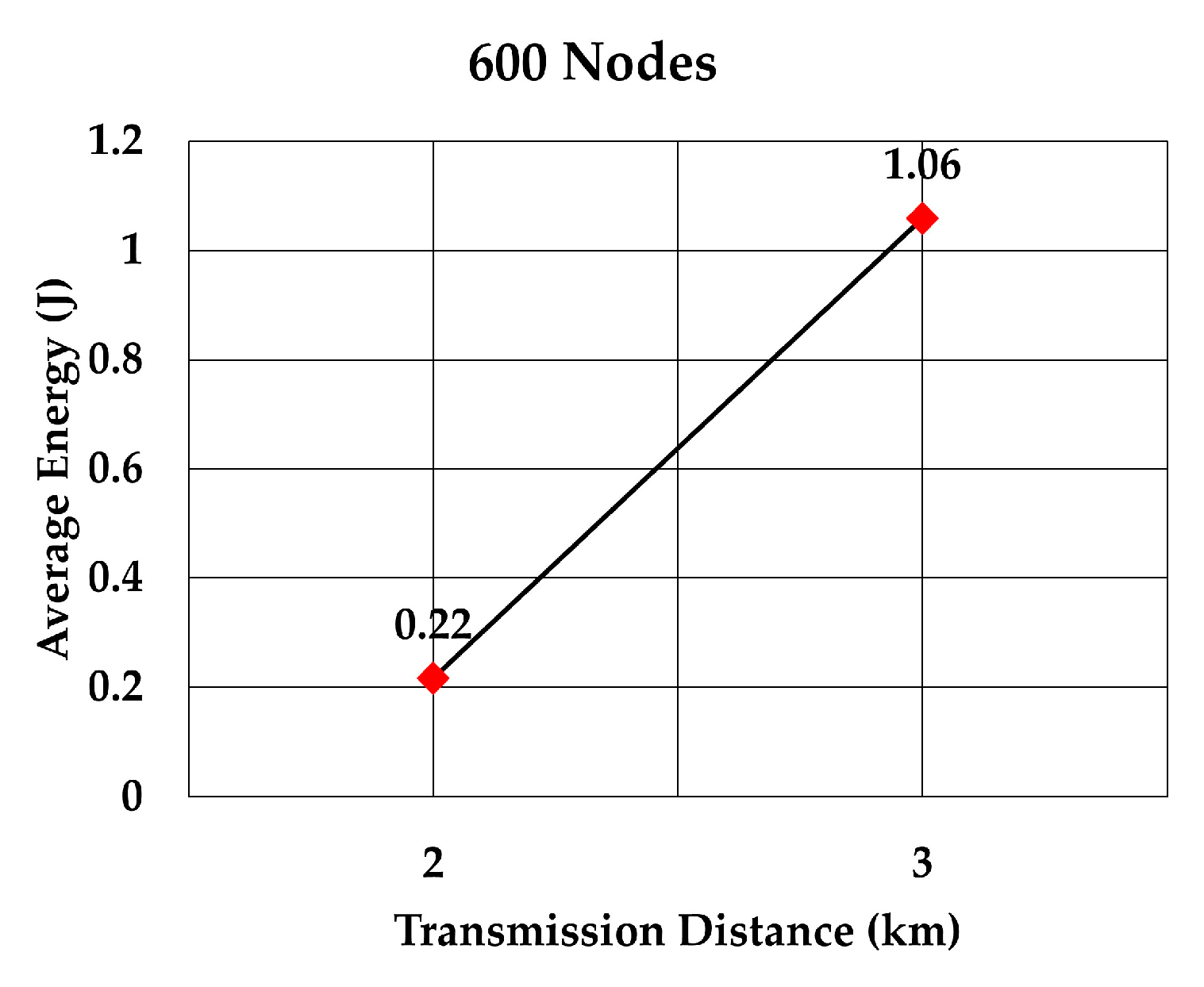
| 6 | 600 | 1.66 | 2, 3 |
| Nodes | Energy Consumption (J) | SPRINT Reduction (%) | |
|---|---|---|---|
| SPRINT | RECRP (Approx.) | ||
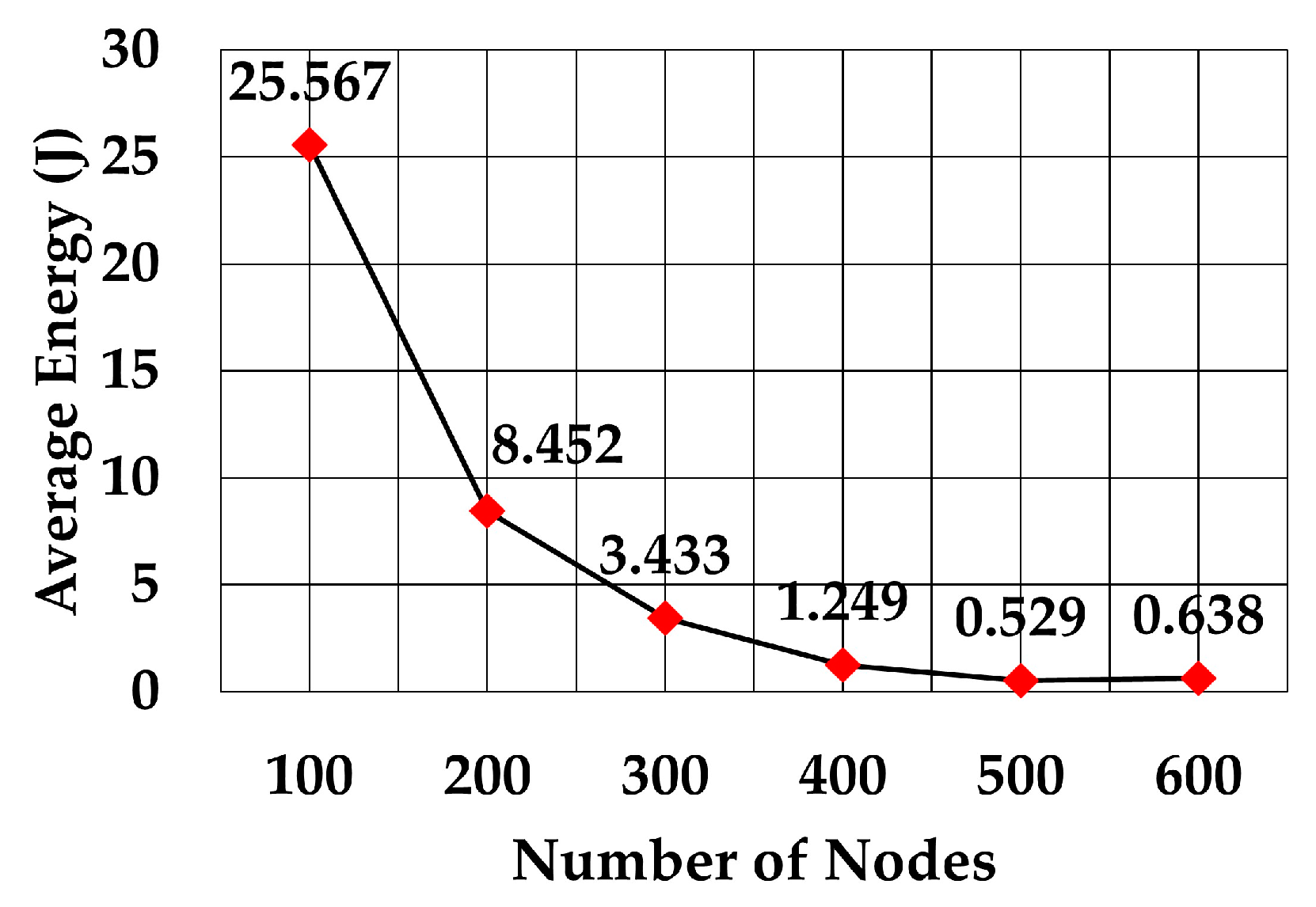
| 100 | 25.567 | 70 | 63% |
| 200 | 8.451 | 53 | 84% |
| 300 | 3.432 | 22 | 84% |
| 400 | 1.249 | 21.5 | 94% |
| 500 | 0.528 | 21 | 97% |
| 600 | 0.637 | 20 | 96% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hyder, W.; Luque-Nieto, M.-Á.; Poncela, J.; Otero, P. Self-Organized Proactive Routing Protocol for Non-Uniformly Deployed Underwater Networks. Sensors 2019, 19, 5487. https://doi.org/10.3390/s19245487
Hyder W, Luque-Nieto M-Á, Poncela J, Otero P. Self-Organized Proactive Routing Protocol for Non-Uniformly Deployed Underwater Networks. Sensors. 2019; 19(24):5487. https://doi.org/10.3390/s19245487
Chicago/Turabian StyleHyder, Waheeduddin, Miguel-Ángel Luque-Nieto, Javier Poncela, and Pablo Otero. 2019. "Self-Organized Proactive Routing Protocol for Non-Uniformly Deployed Underwater Networks" Sensors 19, no. 24: 5487. https://doi.org/10.3390/s19245487
APA StyleHyder, W., Luque-Nieto, M. -Á., Poncela, J., & Otero, P. (2019). Self-Organized Proactive Routing Protocol for Non-Uniformly Deployed Underwater Networks. Sensors, 19(24), 5487. https://doi.org/10.3390/s19245487