Vehicle-to-Vehicle (V2V) Message Content Plausibility Check for Platoons through Low-Power Beaconing †

Abstract
:1. Introduction
- By narrowing the spatial attack window to a small distance to the potential victims on the road, the proposed scheme can force the attackers into the detection range of the line-of-sight (LoS) hardware sensors. Thus, the scheme creates an opportunity for the cooperation between the LoS sensors and the communication for the message contents validation.
- By applying the proposed scheme to platooning, potentially the most vulnerable application of V2X to the false position attack, we show that it can mitigate not only the collision risk but also the discomfort from the unnecessary responses to the false position attack.
2. Related Work
2.1. Vehicle Dynamics-Based Validation
2.2. Sensor-Based Cross-Checking
2.3. Communication-Based Validation
3. Neighbor Verification through Low-Power Beacons
3.1. Sketch of Solution Approach
3.2. Attacker Model
- Before transmission, the attacker can tweak the data obtained from sensors or from the in-vehicle networks such as the controller area network (CAN) bus.
- The attacker has a valid security credential [11]. So, the attacker can correctly encode invalid position data.
- The attacker can increase the Tx power or use directional transmission to affect farther vehicles.
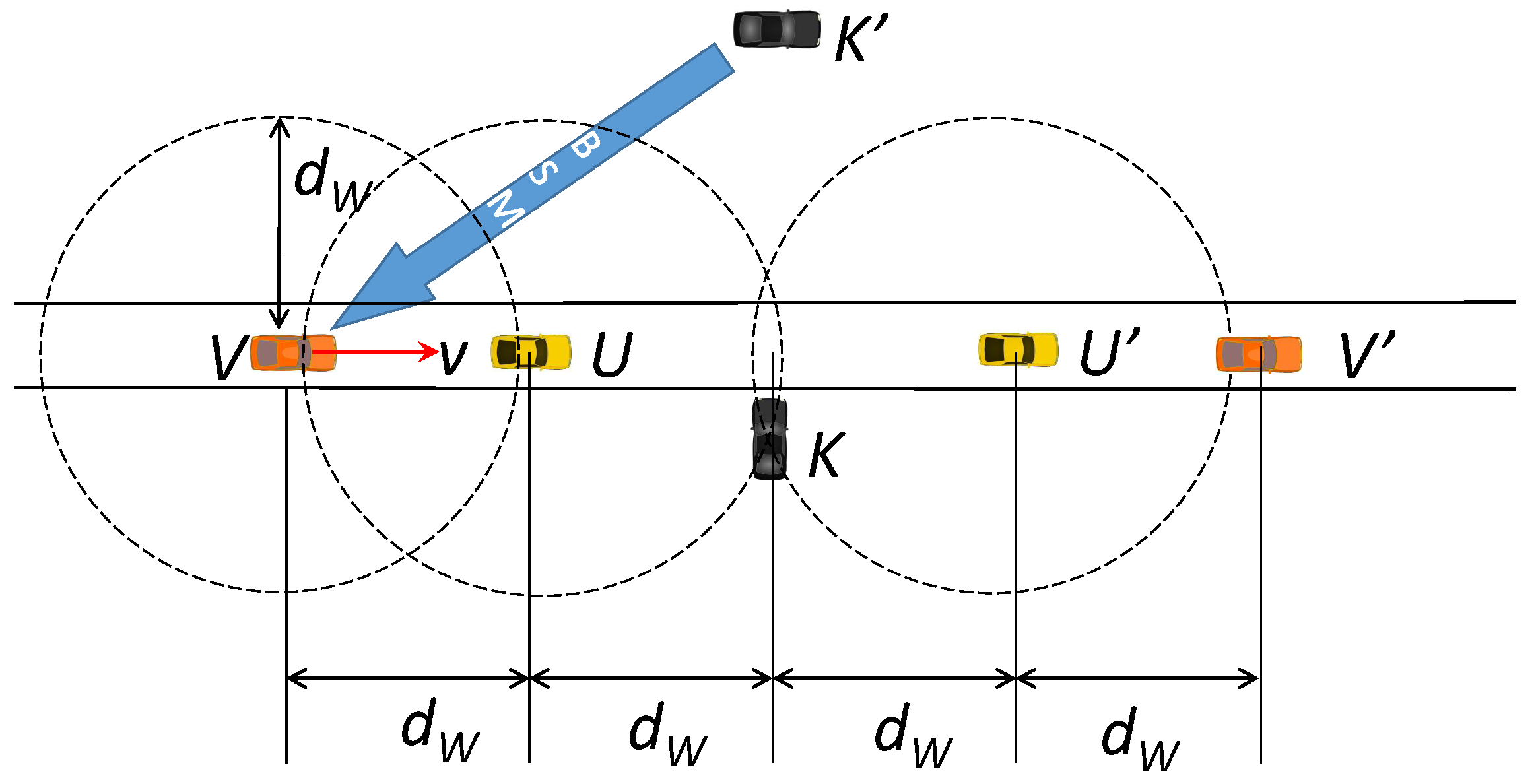
3.3. Neighbor Check through Low-Power Beaconing
- : whisper identifier (WID) of V
- : list of WIDs heard by V, where is one-hop neighbors that passed the neighborhood check using whispers
- : digest of V’s certificate [1]
| Algorithm 1 Whisper check at U. |
|
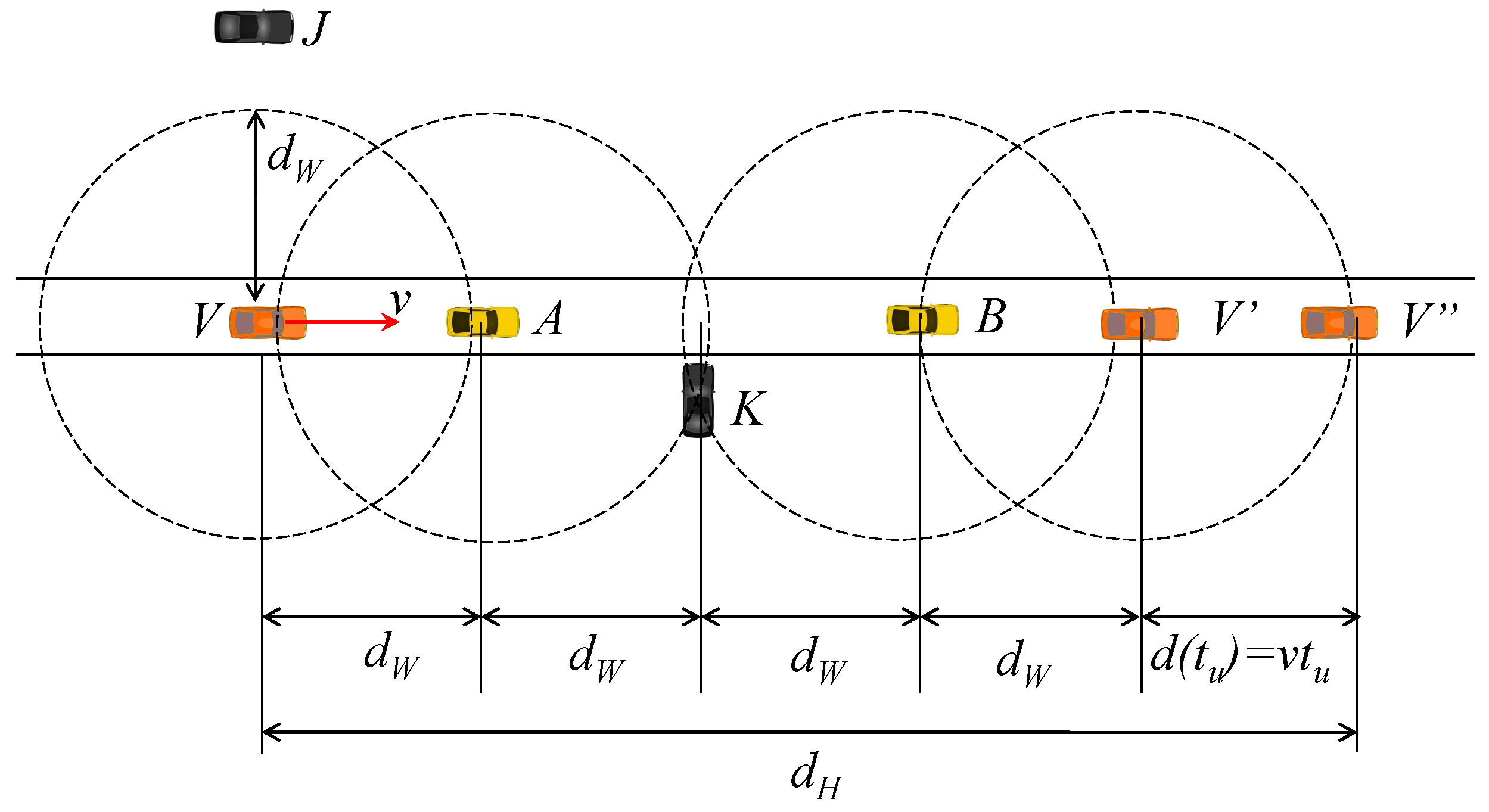
3.4. Range Extension
3.5. Whispering Rate and Tx Power
3.6. Further Check Based on Credit
4. Attack Filtering Performance
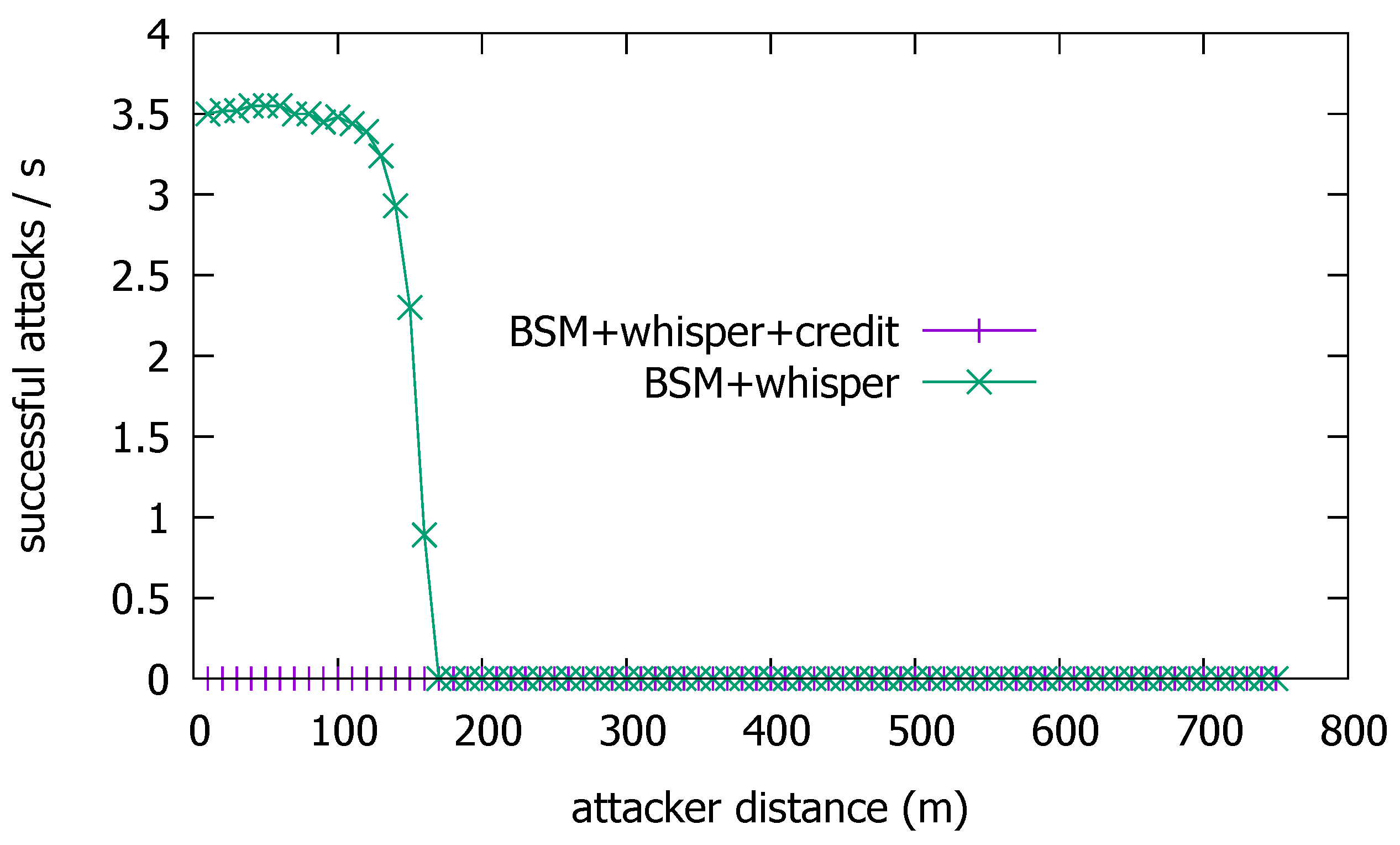
4.1. Attack Mitigation Performance
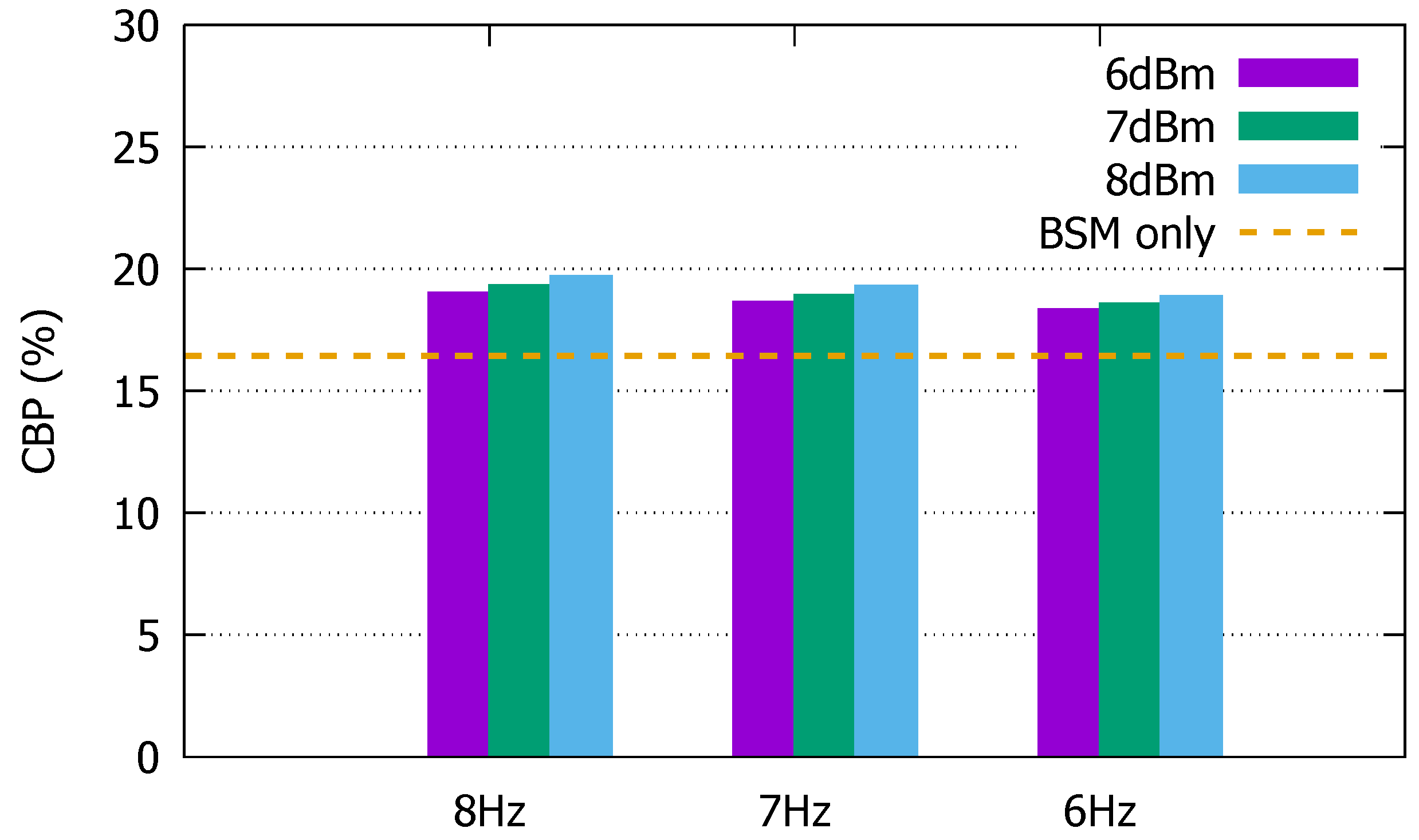
4.2. Channel Utilization Increase
4.3. Effectiveness of Credit-Based Enhancement
5. Application to Platoon Protection
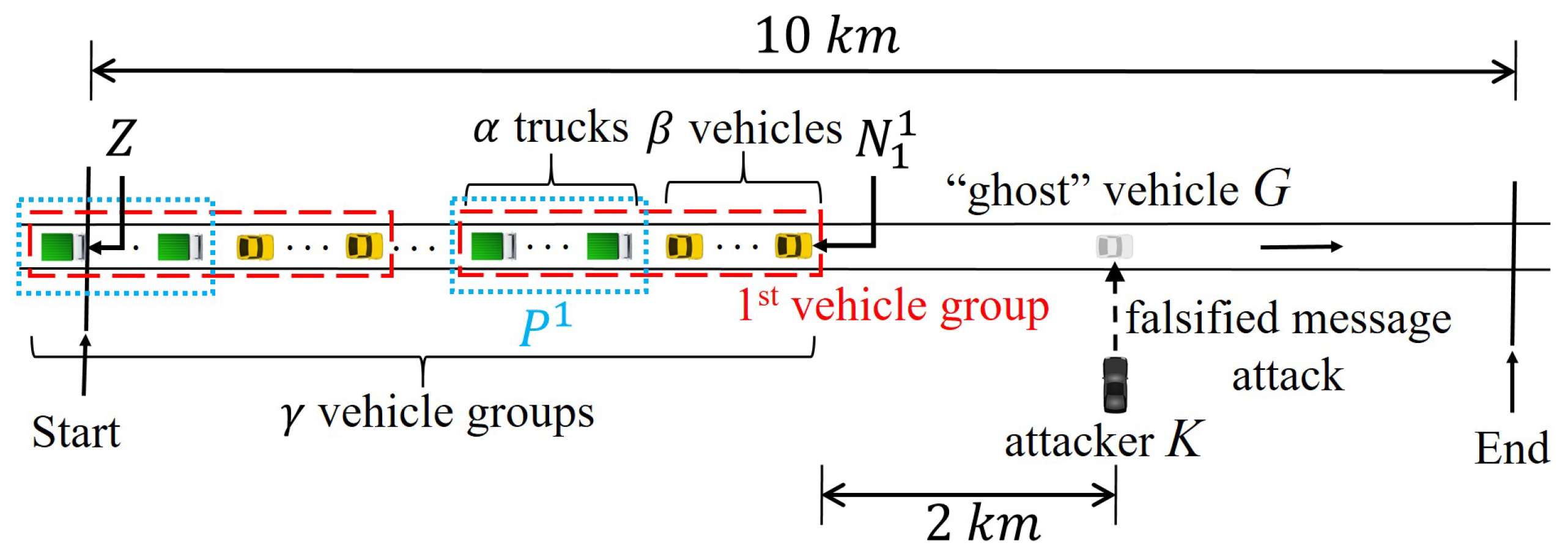
5.1. Problem Formulation
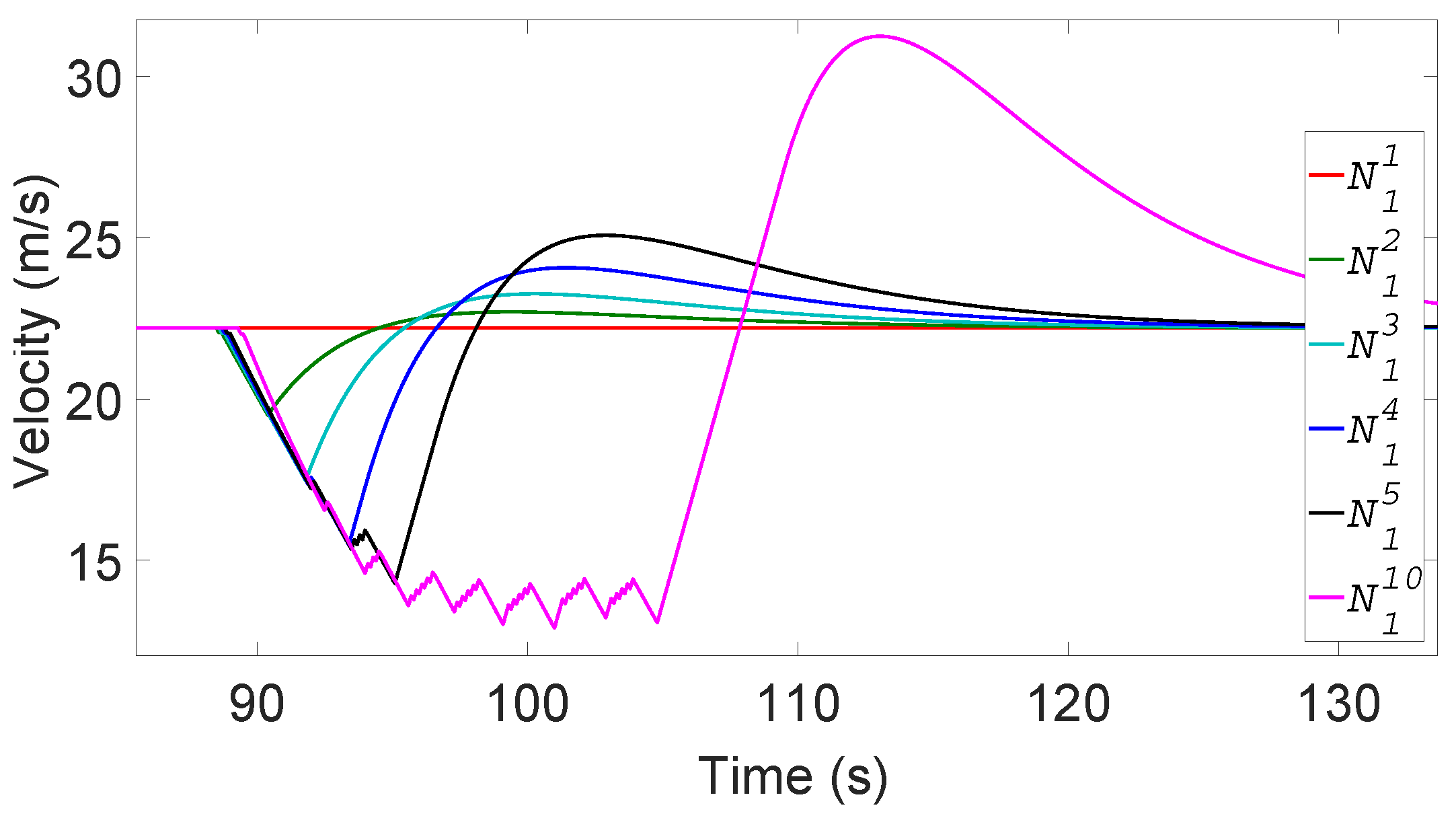
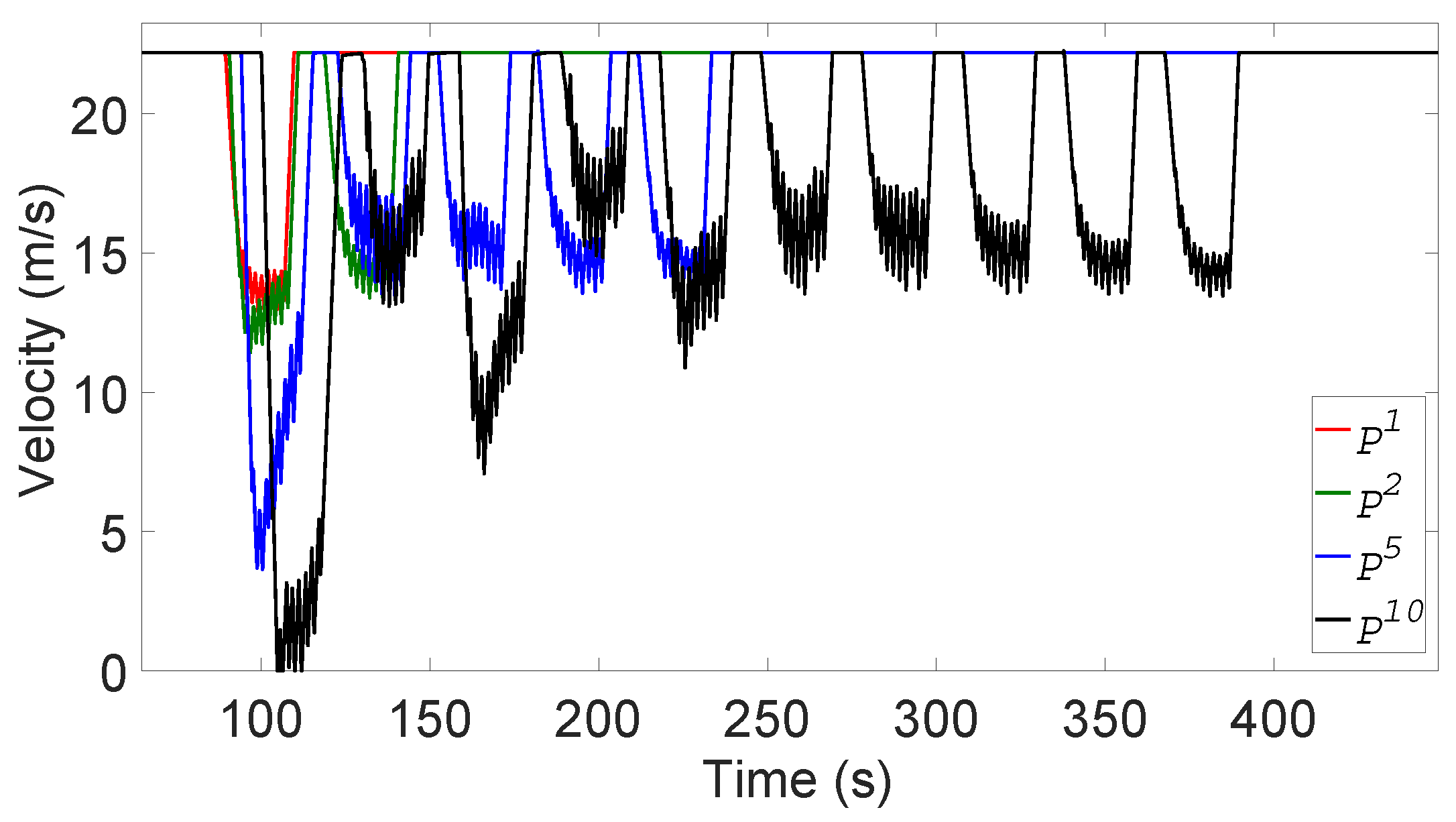
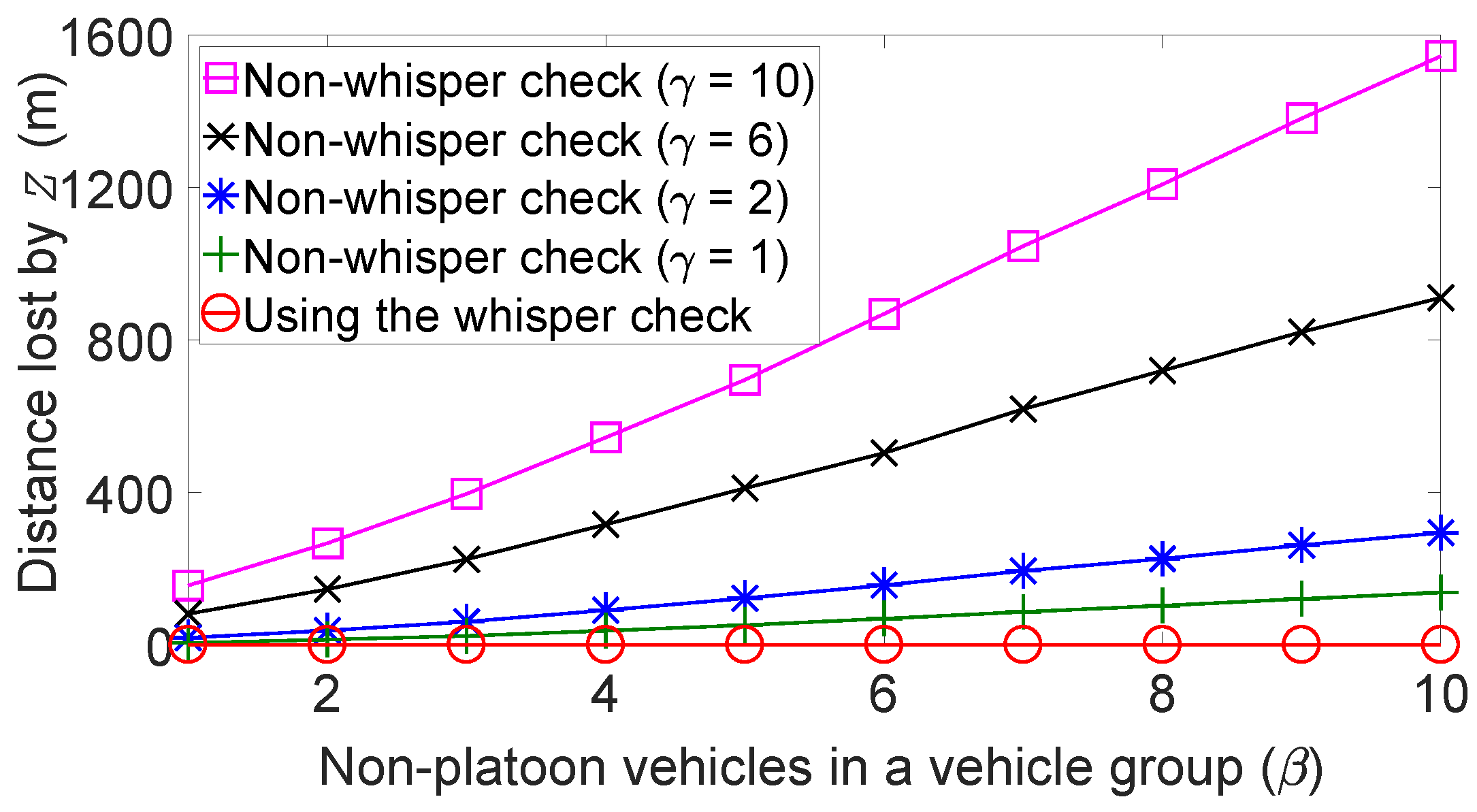
5.2. Effect of Whisper Check with Platoons
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- IEEE 1609 WG. IEEE Standard for Wireless Access in Vehicular Environments (WAVE) —Security Services for Applications and Management Messages; IEEE Std 1609.2-2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar]
- 3G Partnership Project. Study on LTE-Based V2X Services, TR 36.885 v14.0.0; 3GPP: Sophia Antipolis, France, 2016. [Google Scholar]
- SAE International. Dedicated Short Range Communications (DSRC) Message Set Dictionary; SAE: Warrendale, PA, USA, 2016. [Google Scholar]
- IEEE 1609 WG. IEEE Standard for Wireless Access in Vehicular Environments (WAVE)—Multi-Channel Operation; IEEE Std 1609.4-2010; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar]
- Parno, B.; Perrig, A. Challenges in Securing Vehicular Networks. In Proceedings of the ACM HotNets, College Park, MD, USA, 14–15 November 2005. [Google Scholar]
- Leinmüller, T.; Schmidt, R.; Held, A. Cooperative Position Verification—Defending Against Roadside Attackers 2.0. In Proceedings of the 17th ITS World Congress, Busan, Korea, 25–29 October 2010. [Google Scholar]
- Gehring, O.; Fritz, H. Practical results of a longitudinal control concept for truck platooning with vehicle to vehicle communication. In Proceedings of the IEEE Conference on Intelligent Transportation System (ITSC), Boston, MA, USA, 9–12 November 1997. [Google Scholar]
- Bergenhem, C.; Hedin, E.; Skarin, D. Vehicle-to-vehicle communication for a platooning system. Procedia-Soc. Behav. Sci. 2012, 48, 1222–1233. [Google Scholar] [CrossRef] [Green Version]
- 3G Partnership Project. 5G; Service Requirements for Enhanced V2X Scenarios 3GPP TS 22.186 Version 16.2.0 Release 16; 3GPP: Sophia Antipolis, France, 2019. [Google Scholar]
- Blum, J.; Eskandarian, Z. The Threat of Intelligent Collisions. IEEE IT Prof. 2004, 6, 24–29. [Google Scholar] [CrossRef]
- Stübing, H.; Firl, J.; Huss, S.A. A two-stage verification process for car-to-X mobility data based on path prediction and probabilistic maneuver recognition. In Proceedings of the IEEE Vehicular Networking Conference, Amsterdam, The Netherlands, 14–16 November 2011. [Google Scholar]
- Raya, M.; Papadimitratos, P.; Aad, I.; Jungels, D.; Hubaux, J.-P. Eviction of misbehaving and faulty nodes in vehicular networks. IEEE J. Sel. Areas Commun. 2007, 25, 1557–1568. [Google Scholar] [CrossRef] [Green Version]
- Van der Heijden, R.W.; Dietzel, S.; Leinmüller, T.; Kargl, F. Survey on Misbehavior Detection in Cooperative Intelligent Transportation Systems. IEEE Commun. Surv. Tutor. 2019, 21, 779–811. [Google Scholar] [CrossRef] [Green Version]
- Yavvari, C.; Duric, Z.; Wijesekera, D. Vehicular dynamics based plausibility checking. In Proceedings of the IEEE ITSC, Yokohama, Japan, 16–19 October 2017. [Google Scholar]
- Ghaleb, F.A.; Zainal, A.; Rassam, M.A.; Mohammed, F. An effective misbehavior detection model using artificial neural network for vehicular ad hoc network applications. In Proceedings of the IEEE Conference on Application, Information and Network Security (AINS), Sarawak, Malaysia, 13–14 November 2017. [Google Scholar]
- Bißmeyer, N.; Mauthofer, S.; Bayarou, K.M.; Kargl, F. Assessment of node trustworthiness in vanets using data plausibility checks with particle filters. In Proceedings of the Vehicular Networking Conference (VNC), Seoul, Korea, 14–16 November 2012. [Google Scholar]
- Schmidt, R.K.; Leinmüller, T.; Schoch, E.; Held, A.; Schäfer, G. Vehicle Behavior Analysis to Enhance Security in VANETs. In Proceedings of the V2VCOM, Eindhoven, The Netherlands, 3 June 2008. [Google Scholar]
- Kim, T.H.J.; Studer, A.; Dubey, R.; Zhang, X.; Perrig, A.; Bai, F.; Bellur, B.; Iyer, A. VANet alert endorsement using multi-source filters. In Proceedings of the ACM VANET, Chicago, IL, USA, 24 September 2010. [Google Scholar]
- Yan, G.; Olariu, S.; Weigle, M.C. Providing VANET security through active position detection. Comput. Commun. 2008, 31, 2883–2897. [Google Scholar] [CrossRef] [Green Version]
- Sun, M.; Li, M.; Gerdes, R. A data trust framework for VANETs enabling false data detection and secure vehicle tracking. In Proceedings of the IEEE Conference on Communications and Network Security (CNS), Las Vegas, NV, USA, 9–11 October 2017. [Google Scholar]
- LeBlanc, H.J.; Hassan, F.; Gomez, E.; Alsbou, N. Inter-vehicle communication assisted localization with resilience to false data injection attacks. In Proceedings of the ACM CarSYS, New York, NY, USA, 3–7 October 2016. [Google Scholar]
- Kuk, S.; Kim, H.; Park, Y. Detecting False Position Attack in Vehicular Communications Using Angular Check. In Proceedings of the ACM Carsys, Snowbird, UT, USA, 16–20 October 2017. [Google Scholar]
- Leinmüller, T.; Schoch, E.; Kargl, F.; Maihöfer, C. Improved security in geographic ad hoc routing through autonomous position verification. In Proceedings of the ACM VANET, Los Angeles, CA, USA, 29 September 2006. [Google Scholar]
- SAE International. Dedicated Short Range Communications (DSRC) Common Performance Requirements; SAE: Warrendale, PA, USA, 2017. [Google Scholar]
- Ruj, S.; Cavenaghi, M.A.; Huang, Z.; Nayak, A.; Stojmenovic, I. On Data-Centric Misbehavior Detection in VANETs. In Proceedings of the IEEE Vehicular Technology Conference (VTC Fall), San Francisco, CA, USA, 5–8 September 2011. [Google Scholar]
- Jin, D.; Song, J. A traffic flow theory aided physical measurementbased sybil nodes detection mechanism in vehicular ad-hoc networks. In Proceedings of the IEEE/ACIS 13th International Conference on Computer and Information Science (ICIS), Taiyuan, China, 4–6 June 2014. [Google Scholar]
- Bouassida, M.S.; Guette, G.; Shawky, M.; Ducourthial, B. Sybil nodes detection based on received signal strength variations within vanet. Int. J. Netw. Secur. 2009, 9, 22–33. [Google Scholar]
- National Highway Traffic Safety Administration (NHTSA). US DoT Advances Connected Vehicle Technology to Prevent Hundreds of Thousands of Crashes; NHTSA: Washington, DC, USA, 2016.
- Kim, T.; Kim, H. Vehicle-to-Vehicle Message Content Plausibility Check through Low-Power Beaconing. In Proceedings of the IEEE 86th Vehicular Technology Conference: VTC2017-Fall, Toronto, ON, Canada, 24–27 September 2017. [Google Scholar]
- IEEE 1609 WG. IEEE Standard for Wireless Access in Vehicular Environments (WAVE)—Networking Services; IEEE Std 1609.3-2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar]
- 3G Partnership Project. Evolved Universal Terrestrial Radio Access (E-UTRA); Medium Access Control (MAC) Protocol Specification (v15.7.0, Release 15); Technical Report 36.321; 3GPP: Sophia Antipolis, France, 2019. [Google Scholar]
- Bai, F.; Stancil, D.D.; Krishnan, H. Toward understanding characteristics of dedicated short range communications (DSRC) from a perspective of vehicular network engineers. In Proceedings of the ACM MobiCom, Chicago, IL, USA, 20–24 September 2010. [Google Scholar]
- Fricke, L.B. Traffic Accident Reconstruction, 2nd ed.; Northwestern University Traffic Institute: Kenosha, WI, USA, 1990. [Google Scholar]
- Green, M. How long does it take to stop? Methodological analysis of driver perception-brake times. Transp. Hum. Factors 2000, 2, 195–216. [Google Scholar] [CrossRef]
- Lu, X.-Y.; Shladover, S.E. Automated Truck Platoon Control; California PATH Research Report UCB-ITS-PRR-2011-1; University of California: Berkeley, CA, USA, 2011. [Google Scholar]
- Tsugawa, S. Results and issues of an automated truck platoon within the energy ITS project. In Proceedings of the IEEE Intelligent Vehicles Symposium, Ypsilanti, MI, USA, 8–11 June 2014. [Google Scholar]
- Eckhardt, J. European Truck Platooning Challenge 2016-Creating Next Generation Mobility; Storybook: The Hague, The Netherlands, 2016. [Google Scholar]
- Liang, K.Y.; Mårtensson, J.; Johansson, K.H. Fuel-Saving Potentials of Platooning Evaluated through Sparse Heavy-Duty Vehicle Position Data. In Proceedings of the IEEE Intelligent Vehicles Symposium, Ypsilanti, MI, USA, 8–11 June 2014. [Google Scholar]
- Ren, W.; Green, D. Continuous Platooning: A New Evolutionary Operating Concept for Automated highway Systems. In Proceedings of the IEEE American Control Conference, Baltimore, MD, USA, 29 June–1 July 1994. [Google Scholar]
- Rajamani, R. Vehicle Dynamics and Control; Springer: New York, NY, USA, 2006. [Google Scholar]
- Fernandes, P.; Nunes, U. Platooning with IVC-enabled autonomous vehicles: Strategies to mitigate communication delays, improve safety and traffic flow. IEEE Trans. Intell. Transp. Syst. 2012, 13, 91–106. [Google Scholar] [CrossRef]
- Grover, C.; Knight, I.; Okoro, F.; Simmons, I.; Couper, G.; Massie, P.; Smith, B. Automated Emergency Brake Systems: Technical Requirements, Costs and Benefits (TRL Published Project Report PPR 227); Transportation Research Library: Crowthorne, UK, 2008. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Explanation |
|---|---|---|
| 9 dBm | Whisper Tx power | |
| 7 Hz | Whisper frequency | |
| ≤194 B | Whisper size | |
| 10 Hz | BSM frequency | |
| 23 dBm | BSM Tx power | |
| 205 B | BSM size | |
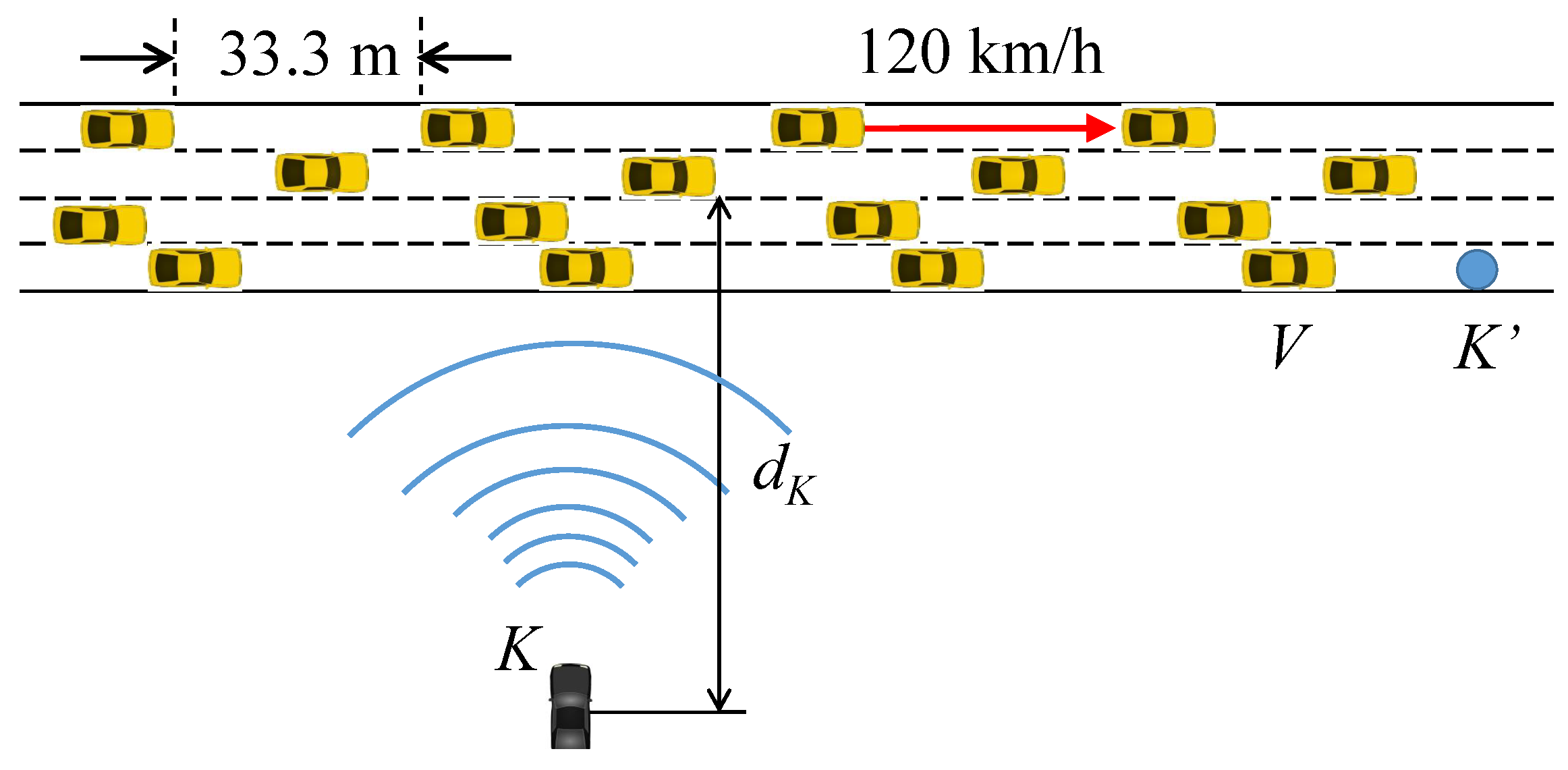
| v | 120 km/h | Vehicle speed |
| 33.3 m | Headway distance | |
| Path loss | Two-ray ground | |
| Fading | Rician () |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.; Kim, T. Vehicle-to-Vehicle (V2V) Message Content Plausibility Check for Platoons through Low-Power Beaconing. Sensors 2019, 19, 5493. https://doi.org/10.3390/s19245493
Kim H, Kim T. Vehicle-to-Vehicle (V2V) Message Content Plausibility Check for Platoons through Low-Power Beaconing. Sensors. 2019; 19(24):5493. https://doi.org/10.3390/s19245493
Chicago/Turabian StyleKim, Hyogon, and Taeho Kim. 2019. "Vehicle-to-Vehicle (V2V) Message Content Plausibility Check for Platoons through Low-Power Beaconing" Sensors 19, no. 24: 5493. https://doi.org/10.3390/s19245493
APA StyleKim, H., & Kim, T. (2019). Vehicle-to-Vehicle (V2V) Message Content Plausibility Check for Platoons through Low-Power Beaconing. Sensors, 19(24), 5493. https://doi.org/10.3390/s19245493