Novel and Automatic Rice Thickness Extraction Based on Photogrammetry Using Rice Edge Features

Abstract
:1. Introduction
2. Materials and Methods
2.1. Experimental Samples
2.2. Experimental Equipment
2.3. Camera Calibration
2.4. Basic Hypothesis of Edge Height
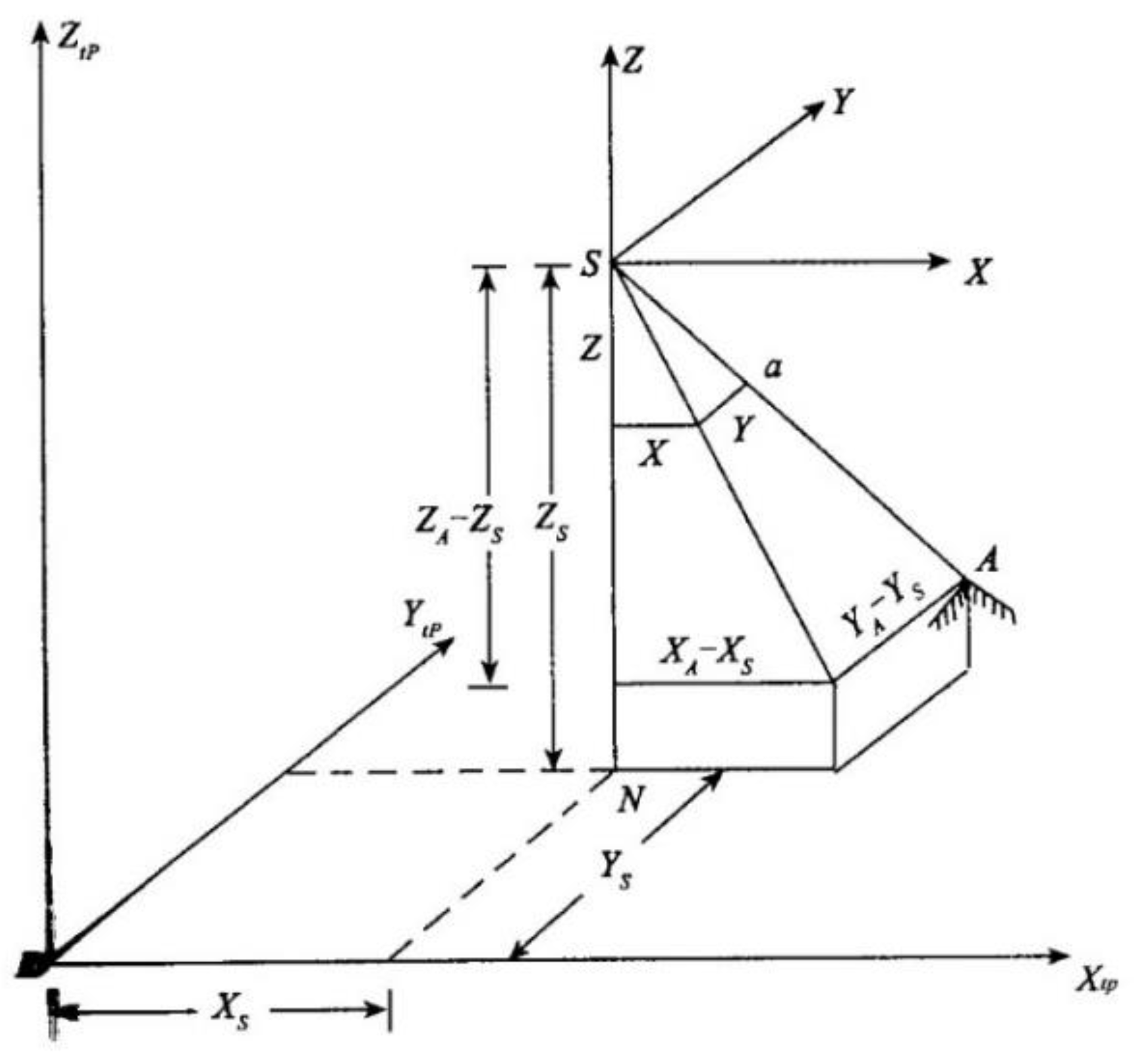
2.5. Calculation Principle of Edge Height
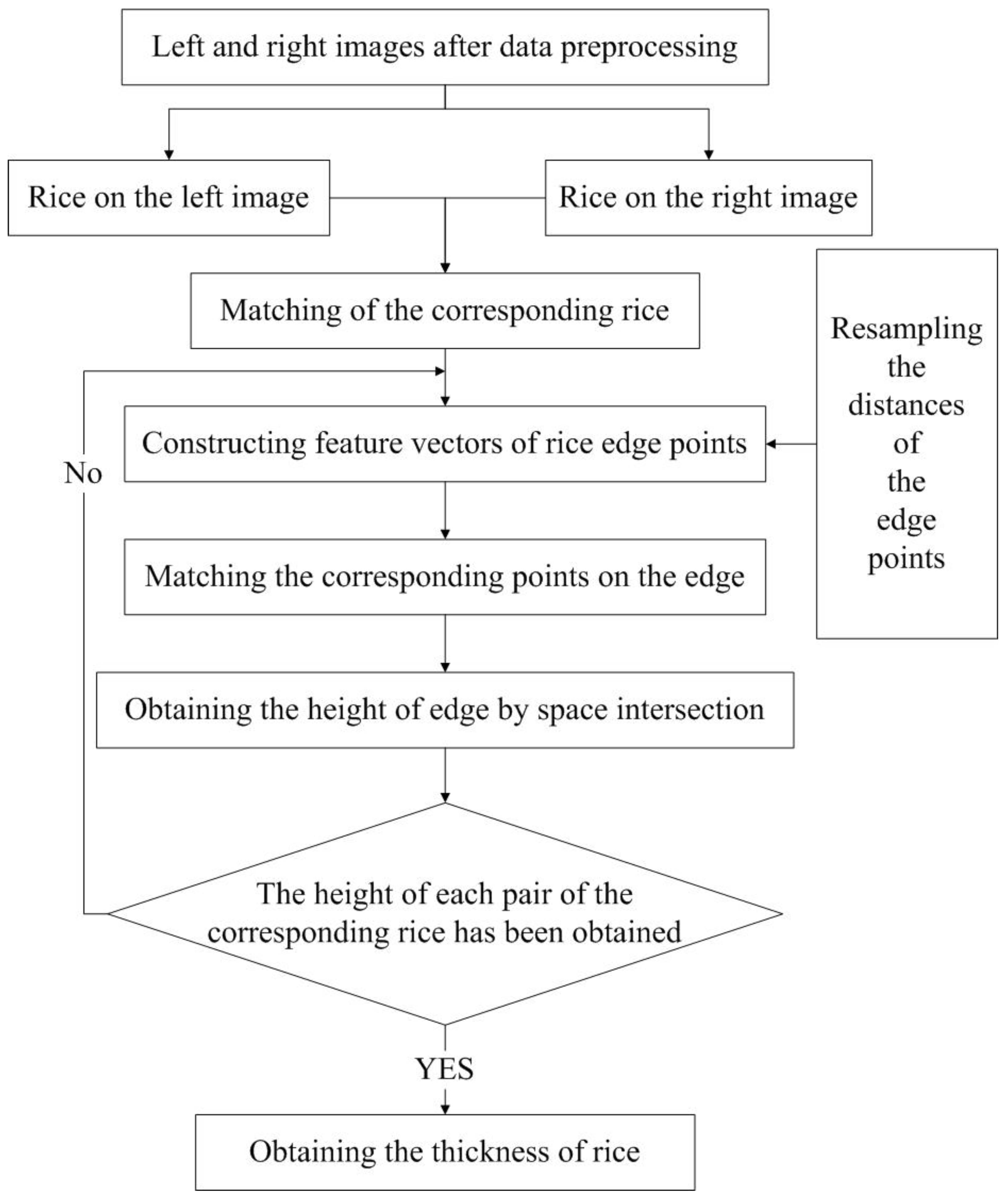
2.6. Matching the Corresponding Points on the Edge of Rice
2.6.1. Matching the Corresponding Rice
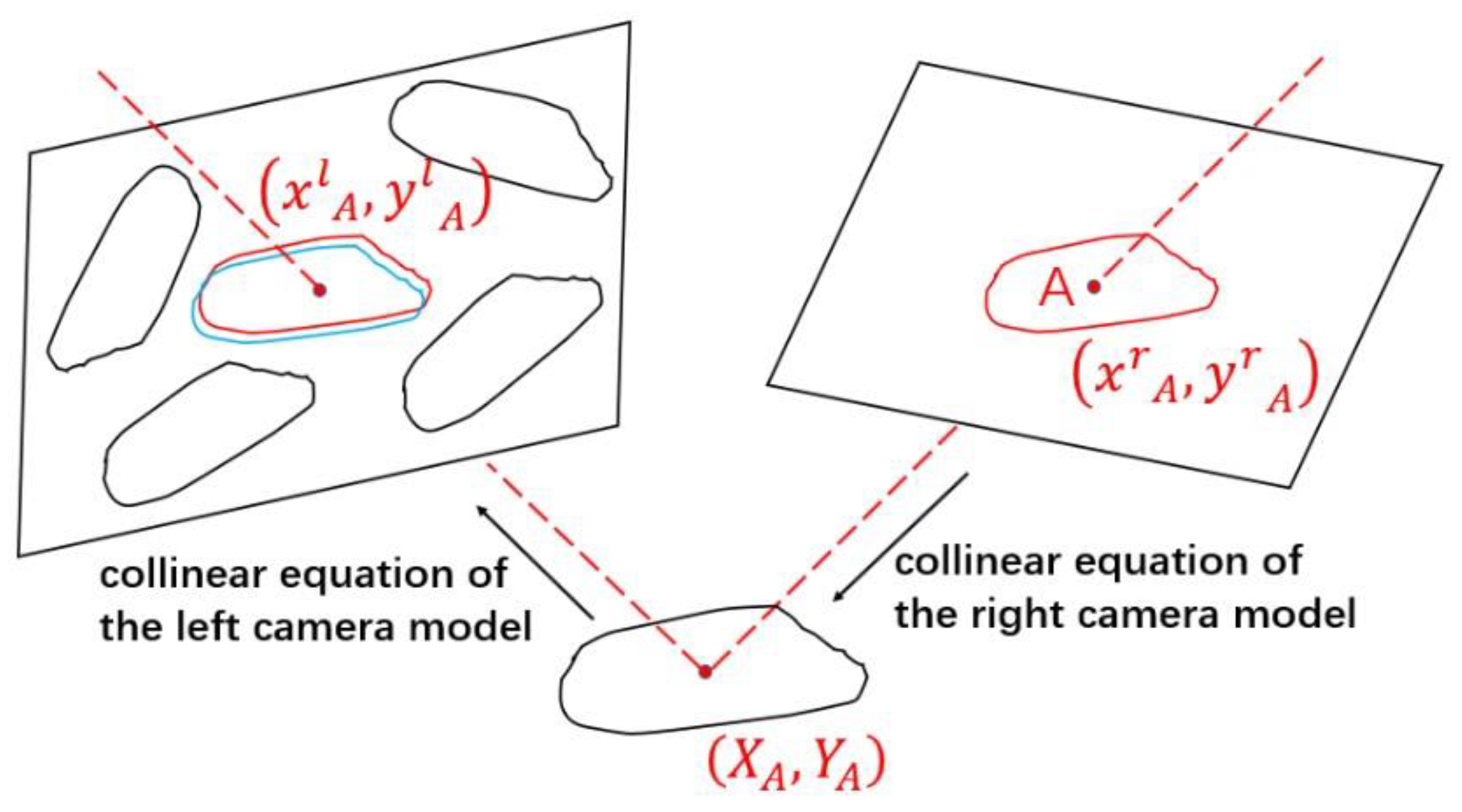
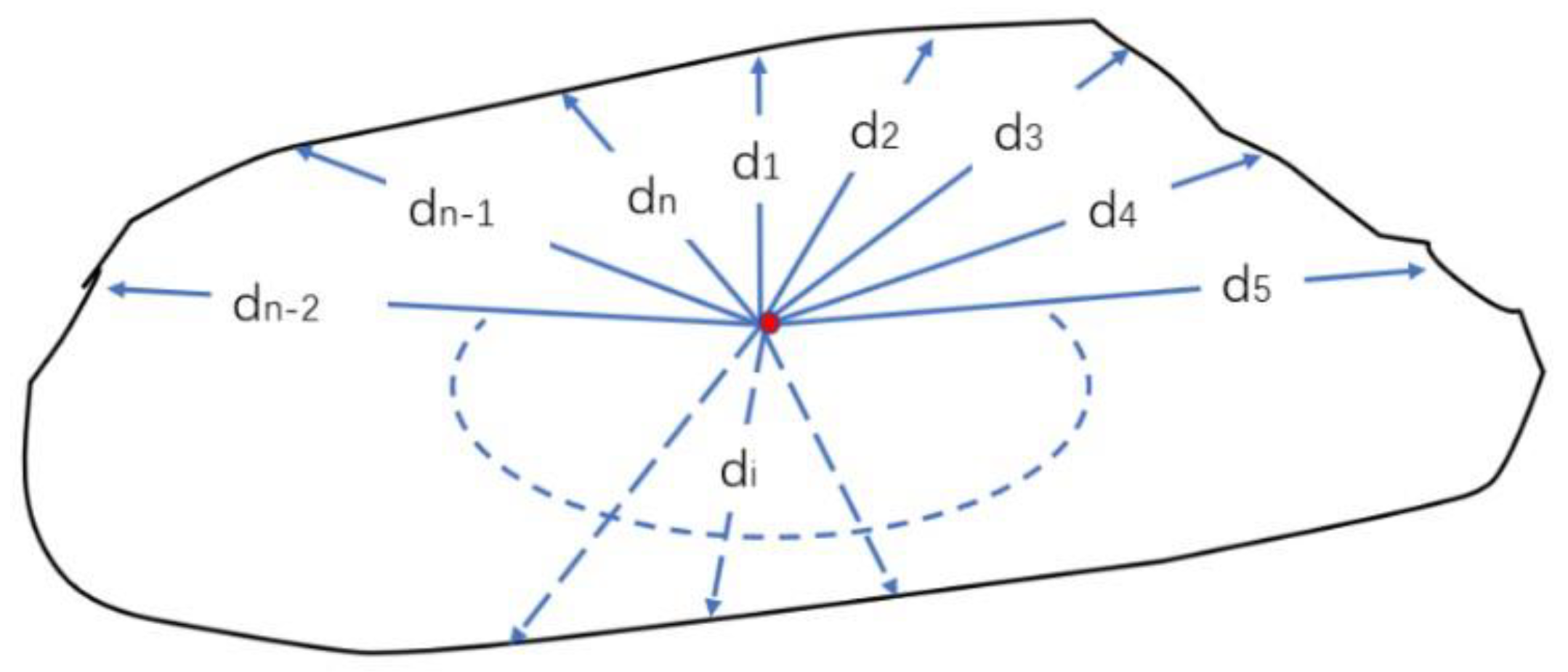
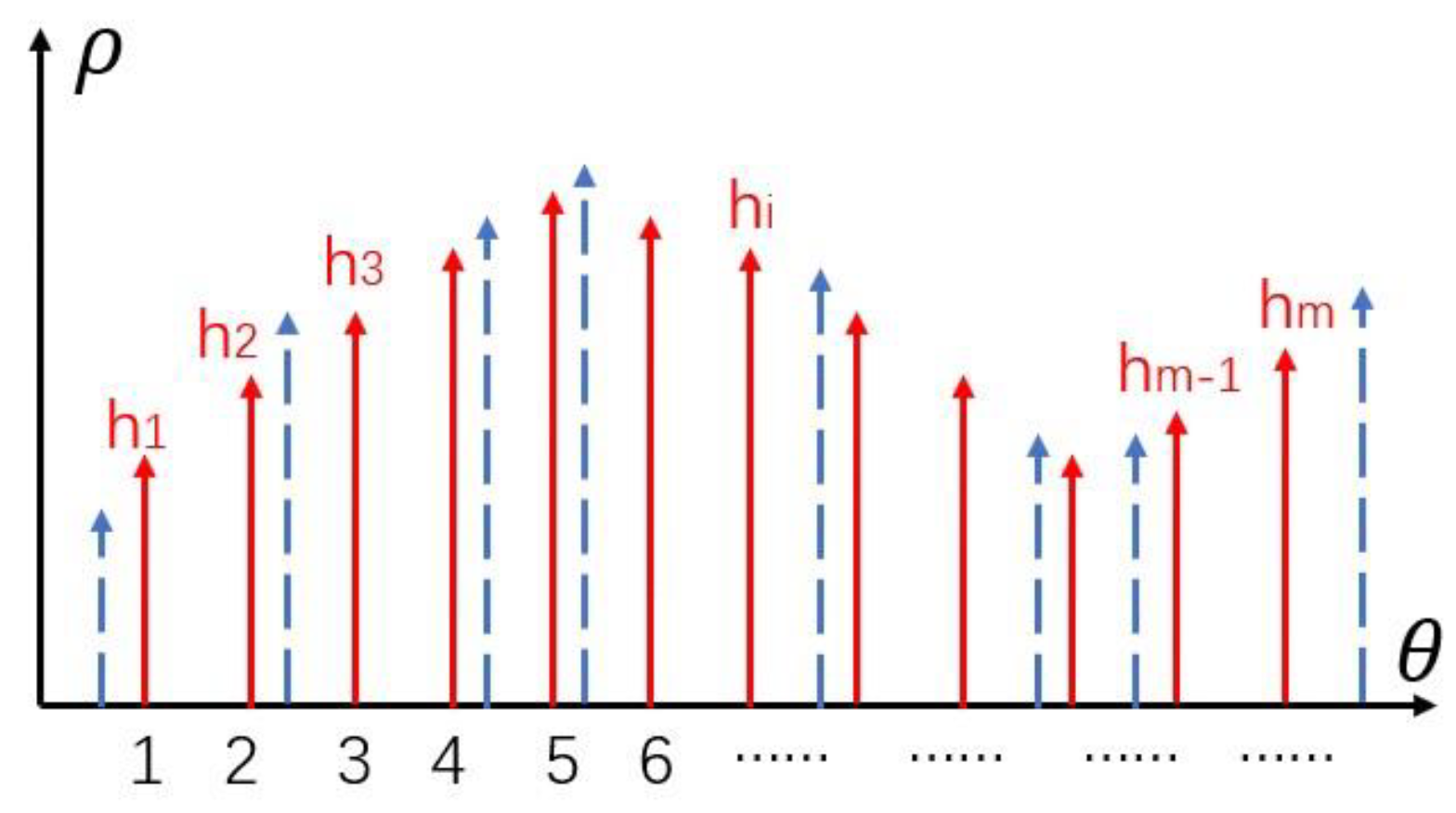
2.6.2. Constructing Feature Vectors of Edge Points and Matching the Corresponding Points
2.7. Obtaining the Height of the Edge by Space Intersection
3. Results and Discussion
3.1. Data Preprocessing
3.1.1. Image Undistortion
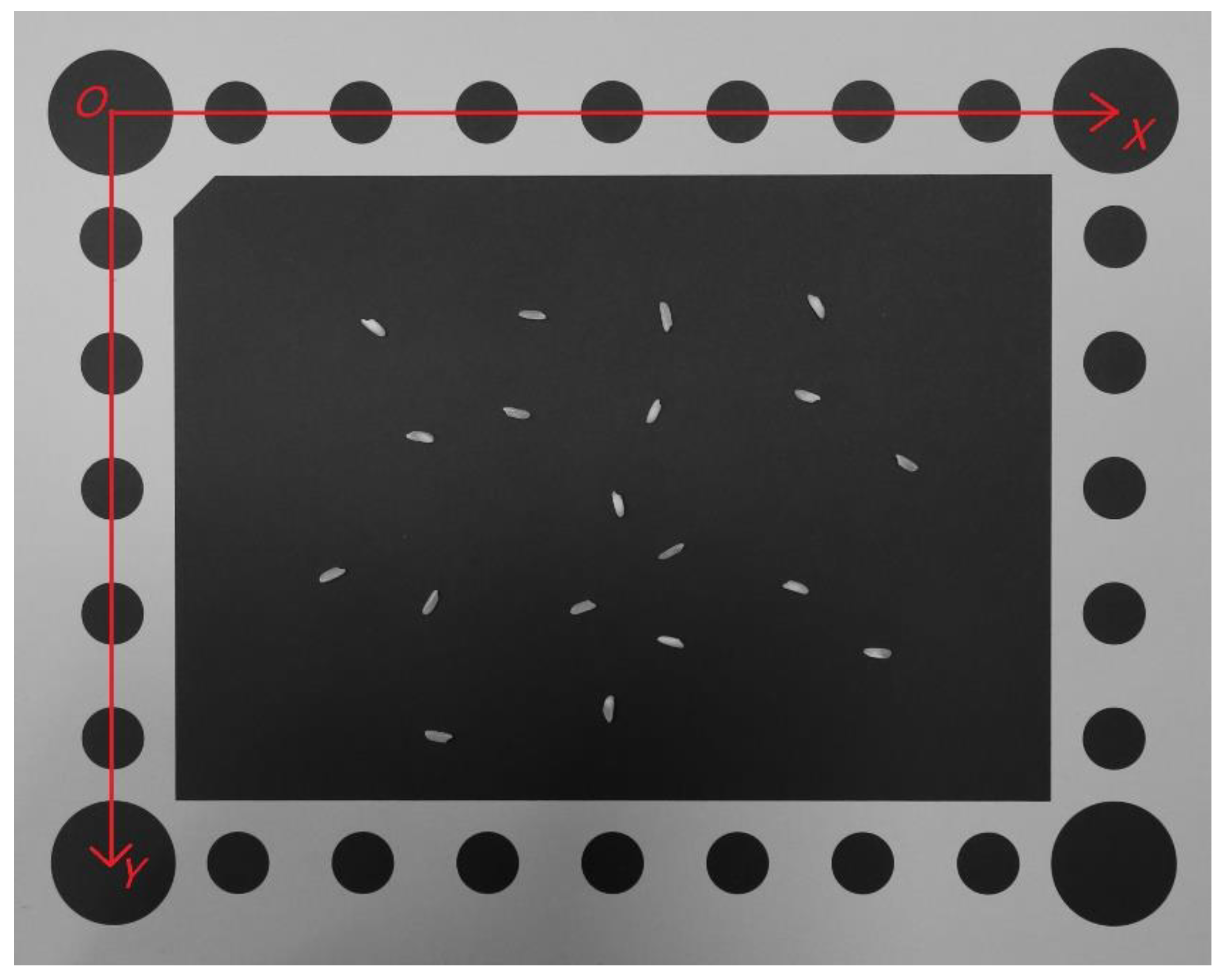
3.1.2. Rice Extraction from the Image
- (1)
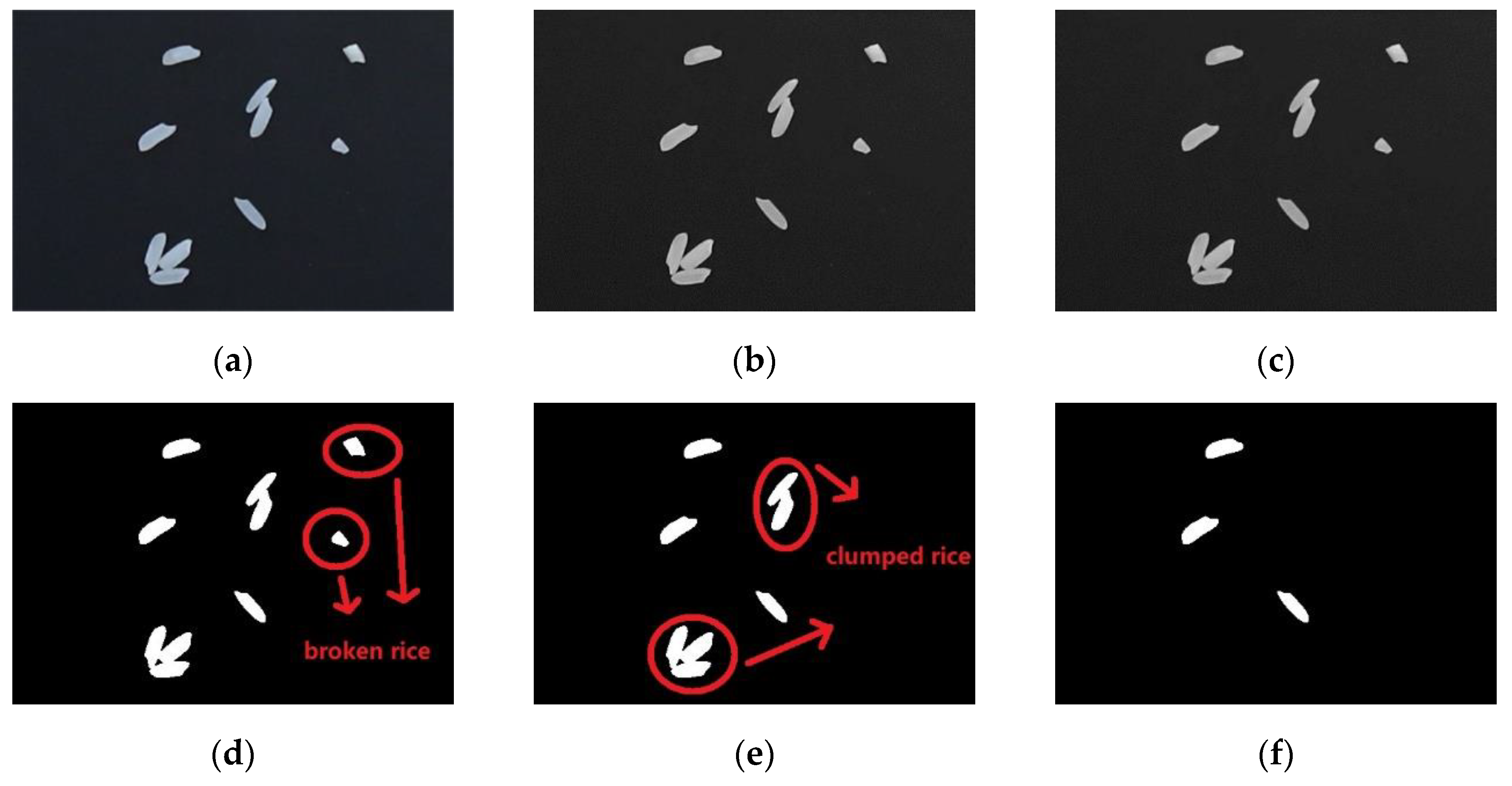
- Image graying. Original colorful images (Figure 11a) were stored through red-blue-green (RBG) channels, however the gray level information was not needed. The image was grayed firstly, which converts RGB values to grayscale values by forming a weighted sum of the R, G, and B components: 0.2989 × R + 0.5870 × G + 0.1140 × B (Figure 11b).
- (2)
- Filtering and denoising. In the process of image acquisition, due to the interference of camera itself or external illumination, dust on the background platform and so on, there is noise in the image. The median filtering method was used to de-noise (Figure 11c).
- (3)
- (4)
- Image postprocessing. In fact, there may be broken rice kernels in the rice samples, or two or even more rice may clump together and stick together [43]. By judging the area of each object, the threshold was set to remove the objects with too small or too large area directly, so as to ensure that the object studied were not disturbed by accidental error samples (Figure 11e,f).
3.2. Visualization of the Matching of Corresponding Points
3.3. Accuracy of Thickness Extraction
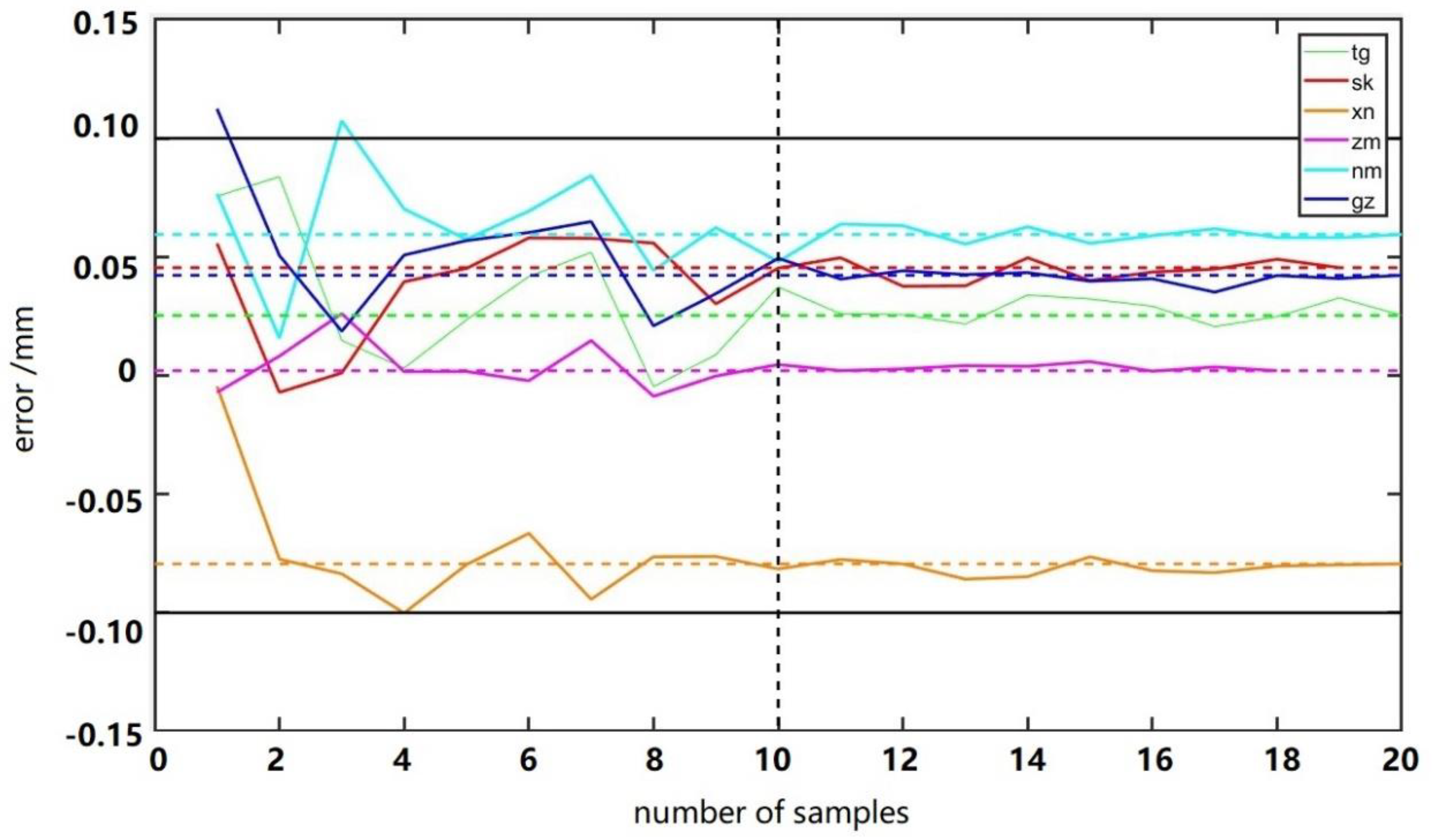
3.4. Selection of the Amount of Samples
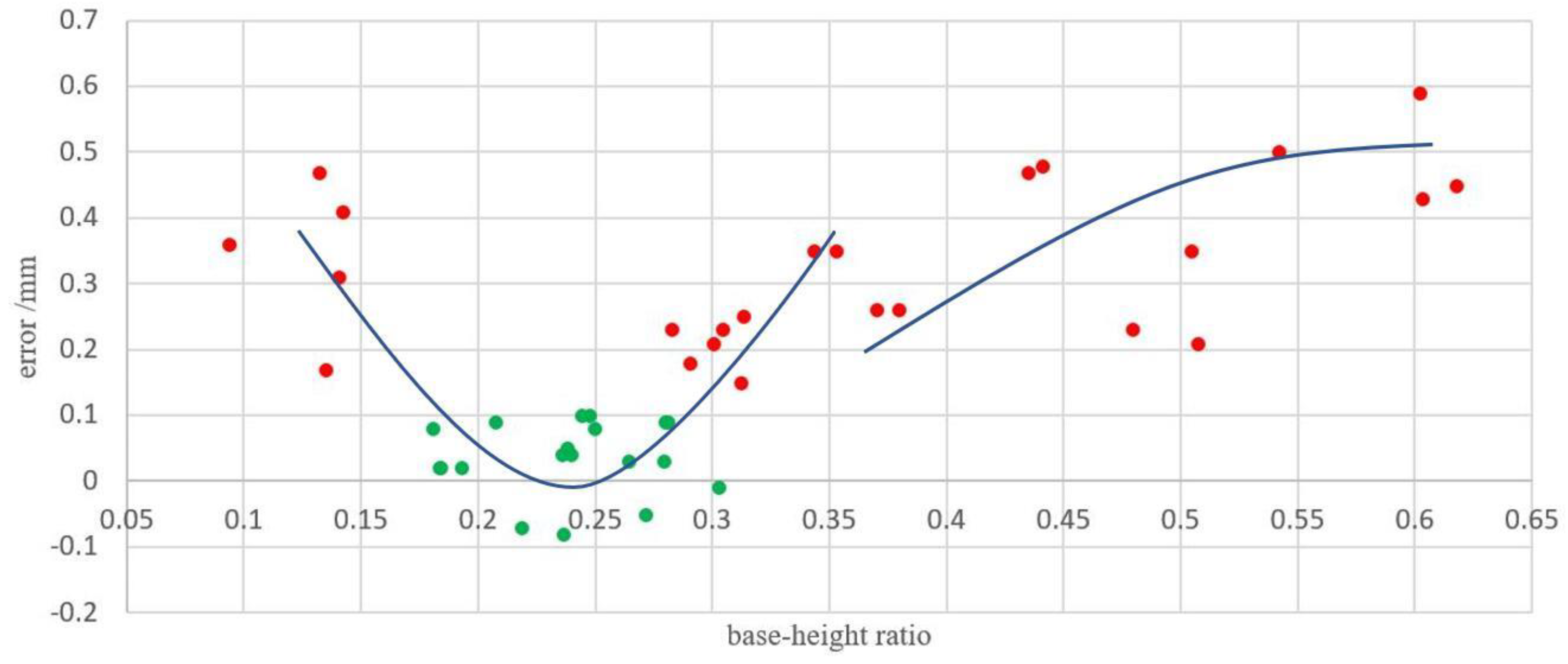
3.5. Effect of the Base–Height Ratio
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Clauss, K.; Ottinger, M.; Leinenkugel, P.; Kuenzer, C. Estimating rice production in the Mekong Delta, Vietnam, utilizing time series of Sentinel-1 SAR data. Int. J. Appl. Earth Obs. 2018, 73, 574–585. [Google Scholar] [CrossRef]
- Confalonieri, R.; Rosenmund, A.S.; Baruth, B. An improved model to simulate rice yield. Agron. Sustain. Dev. 2009, 29, 463–474. [Google Scholar] [CrossRef]
- Jinorose, M.; Prachayawarakorn, S.; Soponronnarit, S. A novel image-analysis based approach to evaluate some physicochemical and cooking properties of rice kernels. J. Food Eng. 2014, 124, 184–190. [Google Scholar] [CrossRef]
- Wei, H.; Chen, Z.; Xing, Z.; Zhou, L.; Liu, Q.; Zhang, Z.; Jiang, Y.; Hu, Y.; Zhu, J.; Cui, P.; et al. Effects of slow or controlled release fertilizer types and fertilization modes on yield and quality of rice. J. Integr. Agric. 2018, 17, 2222–2234. [Google Scholar] [CrossRef]
- Fofana, M.; Futakuchi, K.; Manful, J.T.; Yaou, I.B.; Dossou, J.; Bleoussi, R.T.M. Rice grain quality: A comparison of imported varieties, local varieties with new varieties adopted in Benin. Food Control. 2011, 22, 1821–1825. [Google Scholar] [CrossRef]
- Qiu, X.; Gong, R.; Tan, Y.; Yu, S. Mapping and characterization of the major quantitative trait locus qSS7 associated with increased length and decreased width of rice seeds. Theor. Appl. Genet. 2012, 125, 1717–1726. [Google Scholar] [CrossRef]
- Odek, Z.R.; Siebenmorgen, T.J.; Mauromoustakos, A. Relative Impact of Kernel Thickness and Moisture Content on Rice Fissuring during Drying. Appl. Eng. Agric. 2018, 34, 239–246. [Google Scholar] [CrossRef]
- Gull, S.; Haider, Z.; Gu, H.; Raza Khan, R.A.; Miao, J.; Wenchen, T.; Uddin, S.; Ahmad, I.; Liang, G. InDel Marker Based Estimation of Multi-Gene Allele Contribution and Genetic Variations for Grain Size and Weight in Rice (Oryza sativa L.). Int. J. Mol. Sci. 2019, 20, 4824. [Google Scholar] [CrossRef] [Green Version]
- Furbank, R.T.; Tester, M. Phenomics – technologies to relieve the phenotyping bottleneck. Trends Plant Sci. 2011, 16, 635–644. [Google Scholar] [CrossRef]
- Yang, W.; Duan, L.; Chen, G.; Xiong, L.; Liu, Q. Plant phenomics and high-throughput phenotyping: accelerating rice functional genomics using multidisciplinary technologies. Curr. Opin. Plant Biol. 2013, 16, 180–187. [Google Scholar] [CrossRef]
- Zhao, D.; Li, P.; Wang, L.; Sun, L.; Xia, D.; Luo, L.; Gao, G.; Zhang, Q.; He, Y. Genetic dissection of large grain shape in rice cultivar ‘Nanyangzhan’ and validation of a grain thickness QTL (qGT3.1) and a grain length QTL (qGL3.4). Mol. Breeding 2017, 37. [Google Scholar] [CrossRef]
- Grigg, B.C.; Siebenmorgen, T.J. Milling yields and physicochemical properties of long-grain rice thickness fractions. Appl. Eng. Agric. 2016, 32, 915–923. [Google Scholar]
- Adu-Kwarteng, E.; Ellis, W.O.; Oduro, I.; Manful, J.T. Rice grain quality: a comparison of local varieties with new varieties under study in Ghana. Food Control. 2003, 14, 507–514. [Google Scholar] [CrossRef]
- Chen, B.; Shi, S.; Gong, W.; Zhang, Q.; Yang, J.; Du, L.; Sun, J.; Zhang, Z.; Song, S. Multispectral LiDAR point cloud classification: A two-step approach. Remote Sens.-Basel. 2017, 9, 373. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Qian, Y.; Cao, P.; Yin, W.; Dai, F.; Hu, F.; Yan, Z. Calculation method of surface shape feature of rice seed based on point cloud. Comput. Electron. Agr. 2017, 142, 416–423. [Google Scholar] [CrossRef]
- Huang, X.; Zheng, S.; Gui, L.; Zhao, L.; Ma, H. Automatic extraction of high-throughput phenotypic information of grain based on point cloud. Trans. Chin. Soc. Agric. Mach. 2018, 49, 257–264. [Google Scholar]
- Courtois, F.; Faessel, M.; Bonazzi, C. Assessing breakage and cracks of parboiled rice kernels by image analysis techniques. Food Control. 2010, 21, 567–572. [Google Scholar] [CrossRef]
- Sinfort, N.; Bellon, V.; Sevila, F. Image analysis for in-flow measurement of particle size. Food Control. 1992, 3, 84–90. [Google Scholar] [CrossRef]
- Yadav, B.K.; Jindal, V.K. Modeling changes in milled rice (Oryza sativa L.) kernel dimensions during soaking by image analysis. J. Food Eng. 2007, 80, 359–369. [Google Scholar] [CrossRef]
- Patrício, D.I.; Rieder, R. Computer vision and artificial intelligence in precision agriculture for grain crops: A systematic review. Comput. Electron. Agr. 2018, 153, 69–81. [Google Scholar] [CrossRef] [Green Version]
- Fang, C.; Hu, X.; Sun, C.; Duan, B.; Xie, L.; Zhou, P. Simultaneous determination of multi rice quality parameters using image analysis method. Food Anal. Method 2015, 8, 70–78. [Google Scholar] [CrossRef]
- Ling, Y. Study on Grain Appearance Quality Inspection Using Machine Vision. Ph.D. Thesis, China Agricultural University, Beijing, China, 2004. [Google Scholar]
- Ali, S.F.; Jamil, H.; Jamil, R.; Torij, I.; Naz, S. Low cost solution for rice quality analysis using morphological parameters and its comparison with standard measurements. In Proceedings of the 2017 International Multi-topic Conference (INMIC), Lahore, Pakistan, 24–26 November 2017; pp. 1–6. [Google Scholar]
- Huang, C. Key Research on Rice Yield Traits Scorer for Multi-Varieties. Ph.D. Thesis, Huazhong University of Science and Technology, Hubei, China, 2014. [Google Scholar]
- Wan, P. Study on Rice Quality Inspection System. Ph.D. Thesis, Jilin University, Jilin, China, 2009. [Google Scholar]
- Ma, L. The Research for Rice Appearance Quality Judgment Based on Machine Vision. Master’s Thesis, Harbin University of Science and Technology, Harbin, China, 2016. [Google Scholar]
- Zhang, S. Rice grain shape analysis based on pattern recognition. J. Anhui Agric. Sci. 2009, 2, 751–752. [Google Scholar]
- Igathinathane, C.; Pordesimo, L.O.; Batchelor, W.D. Major orthogonal dimensions measurement of food grains by machine vision using ImageJ. Food Res. Int. 2009, 42, 76–84. [Google Scholar] [CrossRef]
- Berman, M.; Coward, D.A.; Whitbourn, L.B.; Osborne, B.G.; Evans, C.J.; Connor, P.M.; Beare, R.J.; Phillips, R.N.; Quodling, R. Measurement of wheat grain yhickness using profilometry. Cereal Chem. 2007, 84, 282–284. [Google Scholar] [CrossRef]
- Zhang, H.; Wei, Q.; Jiang, Z. 3D reconstruction of space objects from multi-views by a visible sensor. Sensors 2017, 17, 1689. [Google Scholar] [CrossRef]
- Pezzuolo, A.; Milani, V.; Zhu, D.; Guo, H.; Guercini, S.; Marinello, F. On-Barn pig weight estimation based on body measurements by structure-from-motion (SfM). Sensors 2018, 18, 3603. [Google Scholar] [CrossRef] [Green Version]
- Andújar, D.; Calle, M.; Fernández-Quintanilla, C.; Ribeiro, Á.; Dorado, J. Three-dimensional modeling of weed plants using low-cost photogrammetry. Sensors 2018, 18, 1077. [Google Scholar] [CrossRef] [Green Version]
- Vadlamudi, L.N.; Vaddella, R.P.V.; Devara, V. Robust image hashing using SIFT feature points and DWT approximation coefficients. ICT Express 2018, 4, 154–159. [Google Scholar] [CrossRef]
- Hou, Y.; Zhang, H.; Zhao, J.; He, J.; Qi, H.; Liu, Z.; Guo, B. Camera lens distortion evaluation and correction technique based on a colour CCD moiré method. Opt. Lasers Eng. 2018, 110, 211–219. [Google Scholar] [CrossRef]
- Zhang, J.; Pan, L.; Wang, S. Photogrammetry, 2nd ed.; Wuhan University Press: Wuhan, China, 2009. [Google Scholar]
- Zhang, Z.Y. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. 2000, 22, 1330–1334. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Liu, H.; Cheng, X. A Miniature Binocular endoscope with local feature matching and stereo matching for 3D measurement and 3D reconstruction. Sensors 2018, 18, 2243. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, Y.; Teng, P.; Shimizu, Y.; Hosoi, F.; Omasa, K. Estimating 3D leaf and stem shape of nursery paprika plants by a novel multi-camera photography system. Sensors 2016, 16, 874. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Elnima, E.E. A solution for exterior and relative orientation in photogrammetry, a genetic evolution approach. J. King Saud Univ. Eng. Sci. 2015, 27, 108–113. [Google Scholar] [CrossRef] [Green Version]
- Pan, B. Recent progress in digital image correlation. Exp. Mech. 2011, 51, 1223–1235. [Google Scholar] [CrossRef]
- Gerard, D.H.; Paul, W.A.C.B. Sub-pixel motion estimation with 3-D recursive search block-matching. Signal Process. Image Commun. 1994, 6, 229–239. [Google Scholar]
- OTSU, N.A. Tlreshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Lin, P.; Chen, Y.M.; He, Y.; Hu, G.W. A novel matching algorithm for splitting touching rice kernels based on contour curvature analysis. Comput. Electron. Agr. 2014, 109, 124–133. [Google Scholar] [CrossRef]
- People’s Republic of China Food Industry Standard—Classification and Judgement of Rice in Grain Shape; LS/T 6116–2017; Standards Press of China: Beijing, China, 2017; Available online: https://www.spc.org.cn/online/LS%252FT%25206116-2017/? (accessed on 14 June 2017).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Name (Abbr.) | Category | Source | Appearance Characteristics |
|---|---|---|---|---|
| 1 | Thai rice (tg) | Indica rice | market | slender rice shape; high transparency |
| 2 | Shengke rice (sk) | Indica rice | Hainanexperiment field | long shape |
| 3 | Xianning rice (xn) | Japonica rice | Xianning experiment field | medium rice shape |
| 4 | Zaomi rice (zm) | Japonica rice | Xianning experiment field | short and full |
| 5 | Glutinous rice (nm) | Sticky rice | market | medium rice shape; low transparency |
| 6 | Luoyou9348 (gz) | Indica rice grain | Ezhou experiment field | slender grain shape with two pointed ends |
| Rice/Grain | No. | Rice Thickness | Time Consuming (s) | Time Consumed by Each Sample (s) | ||
|---|---|---|---|---|---|---|
| Calculated Value/mm | Measured Value/mm | Error/mm | ||||
| tg | 1 | 1.73 | 1.63 | 0.10 | 20.96 | 1.05 |
| 2 | 1.65 | 0.02 | 20.77 | 1.04 | ||
| 3 | 1.65 | 0.02 | 21.19 | 1.06 | ||
| sk | 1 | 1.76 | 1.83 | −0.07 | 21.07 | 1.05 |
| 2 | 1.86 | 0.03 | 21.01 | 1.05 | ||
| 3 | 1.93 | 0.10 | 21.29 | 1.06 | ||
| xn | 1 | 1.85 | 1.77 | 0.08 | 20.86 | 1.04 |
| 2 | 1.81 | 0.04 | 20.91 | 1.05 | ||
| 3 | 1.86 | 0.09 | 20.90 | 1.05 | ||
| zm | 1 | 1.91 | 1.86 | 0.05 | 21.21 | 1.06 |
| 2 | 1.85 | −0.01 | 21.41 | 1.07 | ||
| 3 | 1.87 | 0.01 | 20.96 | 1.05 | ||
| nm | 1 | 1.87 | 1.82 | 0.05 | 20.86 | 1.04 |
| 2 | 1.78 | −0.04 | 21.01 | 1.05 | ||
| 3 | 1.88 | 0.06 | 20.89 | 1.04 | ||
| gz | 1 | 2.23 | 2.15 | 0.08 | 21.20 | 1.06 |
| 2 | 2.23 | 2.15 | 0.08 | 20.95 | 1.05 | |
| 3 | 2.13 | 2.09 | 0.04 | 20.91 | 1.05 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, Y.; Fang, S.; Wu, X.; Gong, Y.; Zhu, R.; Liu, J.; Peng, Y. Novel and Automatic Rice Thickness Extraction Based on Photogrammetry Using Rice Edge Features. Sensors 2019, 19, 5561. https://doi.org/10.3390/s19245561
Kong Y, Fang S, Wu X, Gong Y, Zhu R, Liu J, Peng Y. Novel and Automatic Rice Thickness Extraction Based on Photogrammetry Using Rice Edge Features. Sensors. 2019; 19(24):5561. https://doi.org/10.3390/s19245561
Chicago/Turabian StyleKong, Yuchen, Shenghui Fang, Xianting Wu, Yan Gong, Renshan Zhu, Jian Liu, and Yi Peng. 2019. "Novel and Automatic Rice Thickness Extraction Based on Photogrammetry Using Rice Edge Features" Sensors 19, no. 24: 5561. https://doi.org/10.3390/s19245561
APA StyleKong, Y., Fang, S., Wu, X., Gong, Y., Zhu, R., Liu, J., & Peng, Y. (2019). Novel and Automatic Rice Thickness Extraction Based on Photogrammetry Using Rice Edge Features. Sensors, 19(24), 5561. https://doi.org/10.3390/s19245561