A Deployable LPWAN Platform for Low-Cost and Energy-Constrained IoT Applications



Abstract
:1. Introduction
1.1. Fast Prototyping and Deployment LoRaWAN Boards
1.2. Improving Arduino-Based Platforms
2. LoRaWAN Communication Link Theory
2.1. Uplink-Centric MAC Design
2.2. Accessing the Network
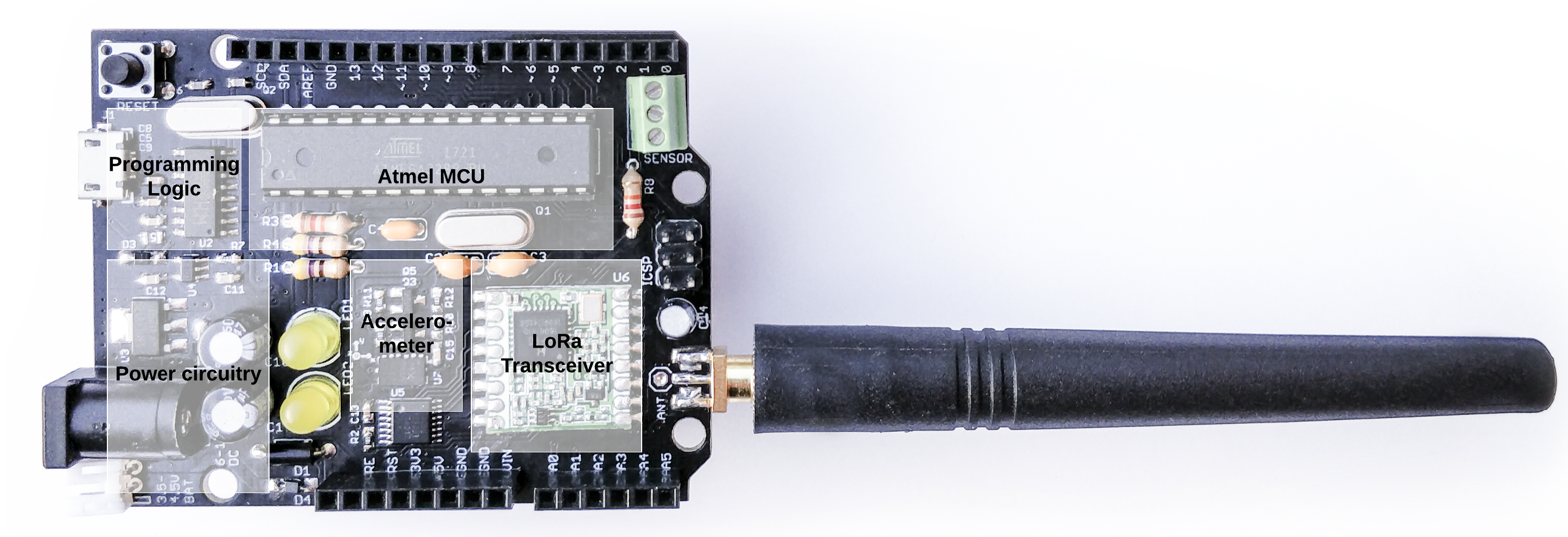
3. Wireless Sensor Node Design
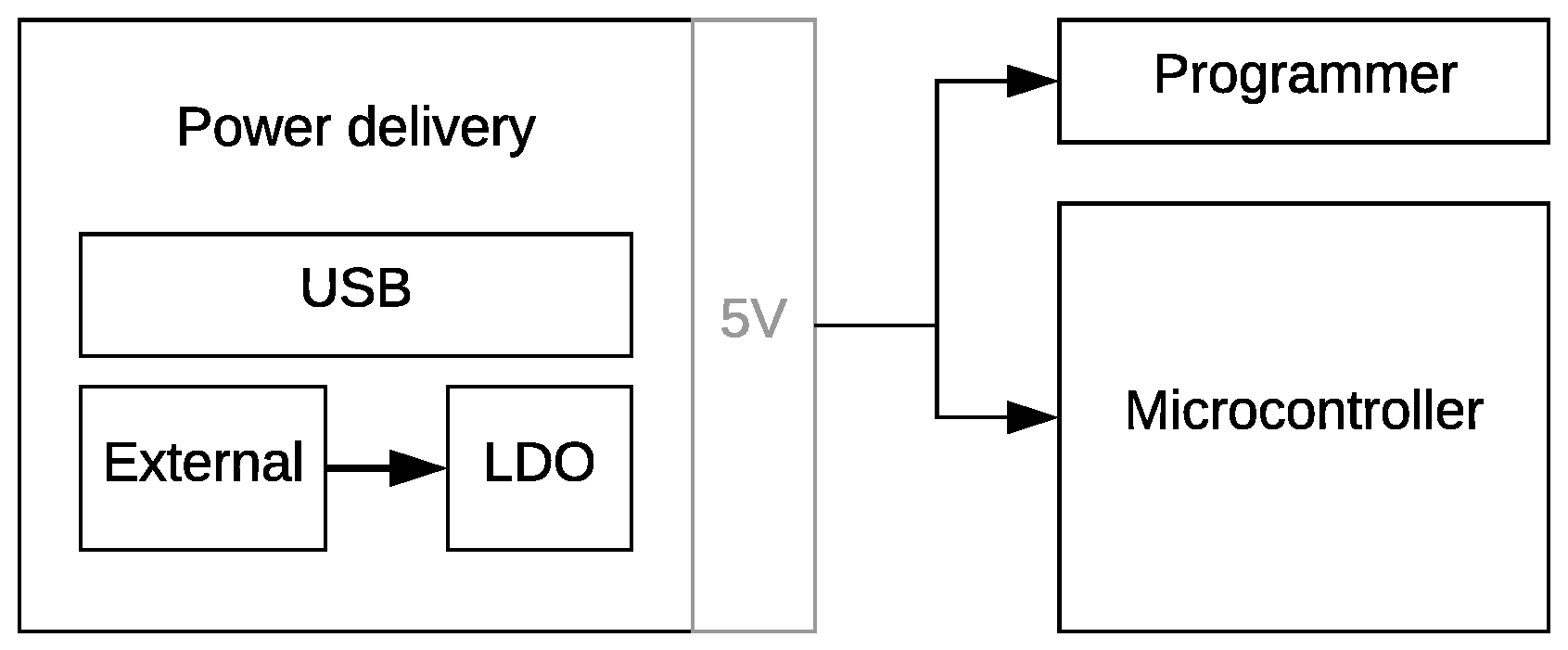
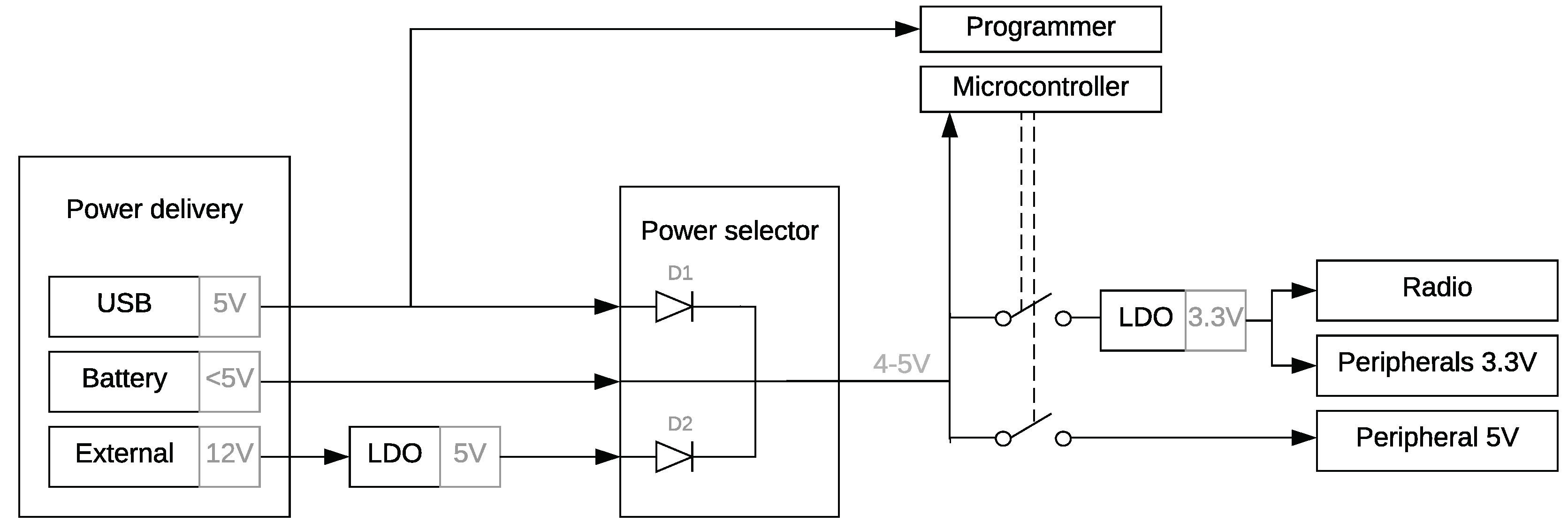
3.1. Node Architecture
3.1.1. Power Selector
3.1.2. Arduino-Vompatible MCU
3.1.3. LoRa Transceiver
3.1.4. Peripherals
3.2. Energy Provision
4. Assessment of the Energy Efficiency and Expected Lifetime
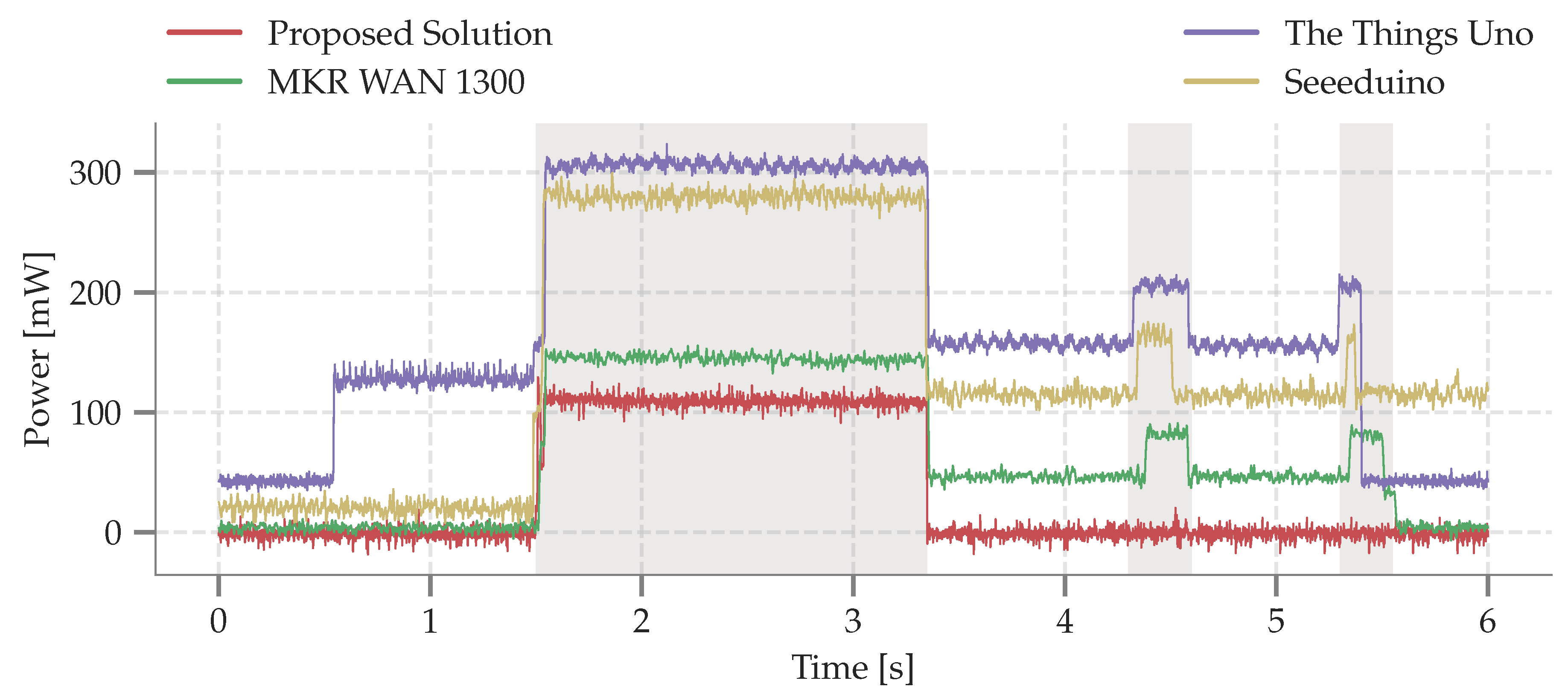
4.1. Power Profile of Different Power States
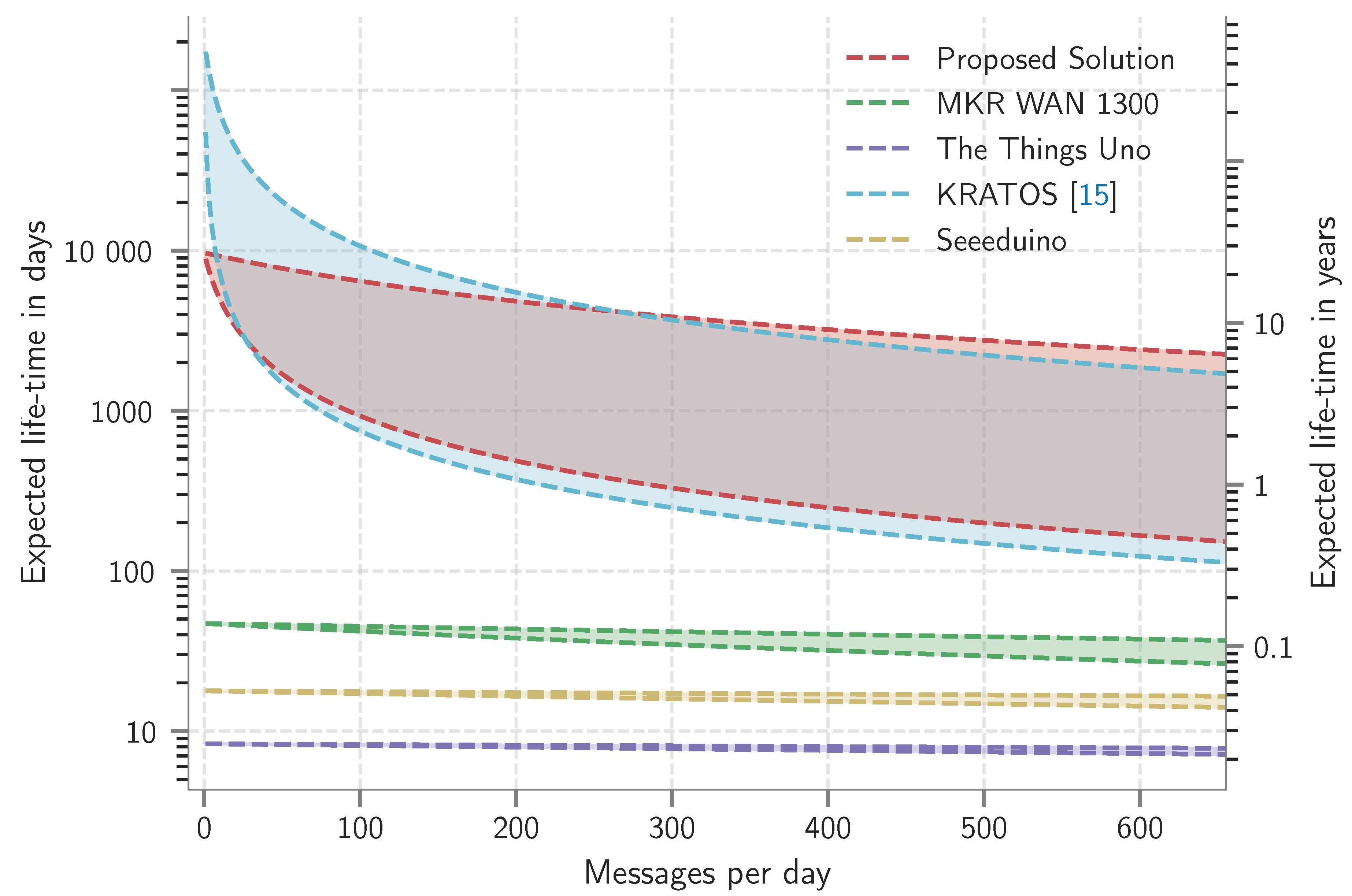
4.2. Expected Lifetime
5. Example Application
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ABP | Activation By Personalization |
| ADR | Adaptive Data Rate |
| CSS | Chirp Spread Spectrum |
| FSK | Frequency Shift Keying |
| IDE | Integrated Development Environment |
| IoT | Internet of Things |
| LDO | Low-Dropout regulator |
| LoRa | Long-Range |
| LoRaWAN | Long-Range Wide Area Network |
| LoS | Line-of-Sight |
| LPWAN | Low Power Wide Area Network |
| MAC | Medium Access Control |
| MCU | Microcontroller Unit |
| OTAA | Over the Air Activated |
| PA | Power Amplifier |
| SF | Spreading Factor |
| SPI | Serial Peripheral Interface |
References
- Ikhsan, M.G.; Saputro, M.Y.A.; Arji, D.A.; Harwahyu, R.; Sari, R.F. Mobile LoRa Gateway for Smart Livestock Monitoring System. In Proceedings of the 2018 IEEE International Conference on Internet of Things and Intelligence System (IOTAIS), Bali, Indonesia, 1–3 November 2018; pp. 46–51. [Google Scholar]
- Li, Q.; Liu, Z.; Xiao, J. A Data Collection Collar for Vital Signs of Cows on the Grassland Based on LoRa. In Proceedings of the 2018 IEEE 15th International Conference on e-Business Engineering (ICEBE), Xi’an, China, 12–14 October 2018; pp. 213–217. [Google Scholar] [CrossRef]
- Tardy, I.; Aakvaag, N.; Myhre, B.; Bahr, R. Comparison of Wireless Techniques Applied to Environmental Sensor Monitoring; SINTEF Rapport; SINTEF: Trondheim, Norway, 2017. [Google Scholar]
- Haxhibeqiri, J.; De Poorter, E.; Moerman, I.; Hoebeke, J. A Survey of LoRaWAN for IoT: From Technology to Application. Sensors 2018, 18, 3995. [Google Scholar] [CrossRef] [PubMed]
- Ratasuk, R.; Vejlgaard, B.; Mangalvedhe, N.; Ghosh, A. NB-IoT system for M2M communication. In Proceedings of the 2016 IEEE Wireless Communications and Networking Conference (WCNC), Doha, Qatar, 3–6 April 2016; pp. 1–5. [Google Scholar]
- Ratasuk, R.; Mangalvedhe, N.; Ghosh, A.; Vejlgaard, B. Narrowband LTE-M system for M2M communication. In Proceedings of the 2014 IEEE 80th Vehicular Technology Conference (VTC Fall), Vancouver, BC, Canada, 14–17 September 2014; pp. 1–5. [Google Scholar]
- Han, Y.; Ekici, E.; Kremo, H.; Altintas, O. A survey of MAC issues for TV white space access. Ad Hoc Netw. 2015, 27, 195–218. [Google Scholar] [CrossRef]
- Sornin, N.; Yegin, A. LoRaWAN™ 1.1 Specification. 2017. Available online: https://lora-alliance.org/sites/default/files/2018-04/LoRaWANtm_specification_-v1.1.pdf (accessed on 29 January 2019).
- Reda, H.T.; Daely, P.T.; Kharel, J.; Shin, S.Y. On the Application of IoT: Meteorological Information Display System Based on LoRa Wireless Communication. IETE Tech. Rev. 2018, 35, 256–265. [Google Scholar] [CrossRef]
- Pham, C.; Rahim, A.; Cousin, P. Low-cost, Long-range open IoT for smarter rural African villages. In Proceedings of the 2016 IEEE International Smart Cities Conference (ISC2), Trento, Italy, 12–15 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Buyukakkaslar, M.T.; Erturk, M.A.; Aydin, M.A.; Vollero, L. LoRaWAN as an e-Health Communication Technology. In Proceedings of the 2017 IEEE 41st Annual Computer Software and Applications Conference (COMPSAC), Torino, Italy, 4–8 July 2017; Volume 2, pp. 310–313. [Google Scholar] [CrossRef]
- Davcev, D.; Mitreski, K.; Trajkovic, S.; Nikolovski, V.; Koteli, N. IoT agriculture system based on LoRaWAN. In Proceedings of the 2018 14th IEEE International Workshop on Factory Communication Systems (WFCS), Imperia, Italy, 13–15 June 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Pham, C. Building Low-Cost Gateways and Devices for Open LoRa IoT Test-Beds. Testbeds and Research Infrastructures for the Development of Networks and Communities; Guo, S., Wei, G., Xiang, Y., Lin, X., Lorenz, P., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 70–80. [Google Scholar]
- Pulpito, M.; Fornarelli, P.; Pomo, C.; Boccadoro, P.; Grieco, L. On fast prototyping LoRaWAN: A cheap and open platform for daily experiments. IET Wirel. Sens. Syst. 2018, 8, 237–245. [Google Scholar] [CrossRef]
- Piyare, R.; Murphy, A.L.; Magno, M.; Benini, L. KRATOS: An Open Source Hardware-Software Platform for Rapid Research in LPWANs. arXiv, 2018; arXiv:1809.04143. [Google Scholar]
- Thoen, B.; Leenders, G. Dramco UNO. Available online: https://github.com/DRAMCO/Dramco-UNO (accessed on 29 January 2019).
- LoRa Alliance Technical Committee Regional Parameters Workgroup. LoRaWAN™ 1.1 Regional Parameters. 2018. Available online: https://lora-alliance.org/sites/default/files/2018-04/LoRaWANtm_regional_parameters_v1.1rb_-_final.pdf (accessed on 29 January 2019).
- Microchip. ATmega48A/PA/88A/PA/168A/PA/328/P, megaAVR Data Sheet. Available online: http://ww1.microchip.com/downloads/en/DeviceDoc/ATmega48A-PA-88A-PA-168A-PA-328-P-DS-DS40002061A.pdf (accessed on 29 January 2019).
- Kooijman, M. LoraWAN-in-C Library, Adapted to Run under the Arduino Environment. Available online: https://github.com/matthijskooijman/arduino-lmic (accessed on 29 January 2019).
- Gromeš, J. Arduino Library for LoRa Modules Based on SX127x/RFM9x Chips. Available online: https://github.com/jgromes/LoRaLib (accessed on 29 January 2019).
- Callebaut, G.; Leenders, G.; Buyle, C.; Crul, S. LoRa Coverage Measurements for Point-to-Point Communication. Available online: https://github.com/DRAMCO/LoRaCoverageMeasurements (accessed on 29 January 2019).
- Kiehne, H. Battery Technology Handbook, 2nd ed.; Electrical and Computer Engineering 118; Dekker: New York, NY, USA, 2003. [Google Scholar]
- Buchmann, I. BU-106: Advantages of Primary Batteries. Available online: https://batteryuniversity.com/learn/article/primary_batteries (accessed on 29 January 2019).
- Panasonic. Alkaline Handbook. Available online: https://batteries.eu.panasonic.com/batteryfinder/v3.0/_pdfs/Alkaline-Handbook.pdf (accessed on 29 January 2019).
- Loo, S.; Keller, K. Single-cell Battery Discharge Characteristics Using the TPS61070 Boost Converter. Available online: http://www.ti.com/lit/an/slva194/slva194.pdf (accessed on 29 January 2019).
- Callebaut, G.; Ottoy, G.; Van der Perre, L. Cross-layer framework and optimization for efficient use of the energy budget of IoT Nodes. arXiv, 2018; arXiv:1806.08624. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Proposed Solution | MKR WAN 1300 | The Things Uno | Seeeduino LoRaWAN | KRATOS [15] | |
|---|---|---|---|---|---|
| Host MCU | ATmega328p | SAMD21 | ATmega32u4 | ATSAMD21 | TI MSP430 |
| Modem | Semtech SX1276 chip | Murata CMWX1 | Microchip RN2483 | RisingHF RHF76 | Semtech SX1276 chip |
| Software Environment | Arduino | Arduino | Arduino | Arduino | ContikiOS |
| Supply voltage | 5 V | V | 5 V | 5 V | 5 V |
| Price | <€30 | €33 | €55 | €47 | <€100 |
| Antenna Connector | SMA/u.fl/wire-antenna | u.fl | u.fl | u.fl. | SMA |
| Built-in Antenna | - | - | PCB antenna | Wire-antenna | - |
| Capacity [%] | 100 | 90 | 80 | 70 | 60 | 50 | 40 | 30 | 20 | 10 | 0 |
| 330load [V] | 1.49 | 1.35 | 1.27 | 1.20 | 1.16 | 1.12 | 1.10 | 1.08 | 1.04 | 0.98 | 0.62 |
| Proposed Solution | MKR WAN | The Things Uno | Seeeduino LoRaWAN | |
|---|---|---|---|---|
| Battery configuration | 3AA | 2AA | 3AA | 3AA |
| Drop-out Voltage [V] | 3.27 | 2.17 | 2.25 | 2.54 |
| Drop-out Voltage per cell [V] | 1.09 | 1.08 | 0.75 | 0.85 |
| Untapped capacity [%] | 35 | 30 | 5 | 6 |
| Expected Usable Energy [J] | 21,060 | 15,120 | 30,780 | 30,456 |
| Proposed Solution | MKR WAN | The Things Uno | Seeeduino LoRaWAN | |
|---|---|---|---|---|
| Power [mW] | ||||
| Sleep Power | 0.025 | 3.726 | 42.75 | 19.75 |
| Transmit Power SF7 | 91.35 | 141.5 | 225.9 | 288.9 |
| Transmit Power SF12 | 111.15 | 144.80 | 300.92 | 279.9 |
| Energy [mJ] | ||||
| Radio Pre-processing | 0.36 | 2.28 | 117.85 | 766.87 |
| RX window SF7 | 0 | 106.65 | 325.83 | 171.75 |
| RX window SF12 | 0 | 113.91 | 335.05 | 172.98 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thoen, B.; Callebaut, G.; Leenders, G.; Wielandt, S. A Deployable LPWAN Platform for Low-Cost and Energy-Constrained IoT Applications. Sensors 2019, 19, 585. https://doi.org/10.3390/s19030585
Thoen B, Callebaut G, Leenders G, Wielandt S. A Deployable LPWAN Platform for Low-Cost and Energy-Constrained IoT Applications. Sensors. 2019; 19(3):585. https://doi.org/10.3390/s19030585
Chicago/Turabian StyleThoen, Bart, Gilles Callebaut, Guus Leenders, and Stijn Wielandt. 2019. "A Deployable LPWAN Platform for Low-Cost and Energy-Constrained IoT Applications" Sensors 19, no. 3: 585. https://doi.org/10.3390/s19030585
APA StyleThoen, B., Callebaut, G., Leenders, G., & Wielandt, S. (2019). A Deployable LPWAN Platform for Low-Cost and Energy-Constrained IoT Applications. Sensors, 19(3), 585. https://doi.org/10.3390/s19030585