1. Introduction
Indoor wireless positioning technology has increasingly attracted research interests [
1,
2] for its wide and popular applications in the construction industry, health industry [
3], people guidance and so on. Geometric location based on time-of-arrival (TOA) is the most popular method for accurate positioning systems [
4]. The basic problem in TOA estimation is to extract the TOA of the Line-of-Sight (LOS) path in wireless channels, which is usually interfered by Non-LOS (NLOS) paths in the multipath environment [
5]. Due to the serious NLOS multipath effects and the limited system bandwidth, the conventional TOA estimation methods, such as the inverse Fourier transform (IFT)-based method, cannot achieve higher estimation accuracy [
6].
To improve the TOA estimation accuracy, several super-resolution TOA estimation methods based on the channel frequency responses (CFRs), such as the multiple signal classification (MUSIC)-based method [
1], TLS-ESPRIT [
7]-based method, matrix pencil (MP)-based method [
8,
9] and so on, employ the eigenstructure or eigen-subspace of the CFRs to obtain TOA estimates. In contrast to the conventional methods, these super-resolution methods exploit not only the property of multipaths’ linear phase variation across the frequency dimension but also the sparsity of the main channel multipaths in the time-delay domain, so they can achieve higher accuracy than the conventional methods. Nevertheless, such super-resolution methods are susceptible to the noise since the noise causes serious estimation errors of eigen-subspace or eigenvalues.
Furthermore, the 2-dimension super-resolution TOA estimation methods, such as the 2-dimension MP method [
10], joint beamforming and MUSIC-based method [
11], and the 2-dimension (2D) MUSIC method [
12], employ both the channel frequency responses and the channel space responses to jointly estimate the TOA and AOA. Besides the property of multipaths’ linear phase differences across the frequency dimension and the sparsity of the main channel multipaths, the 2D super-resolution methods also exploits the property of multipaths’ quasi-linear phase variation across the space dimension, hence they can efficiently mitigate the noise effects and further improve the TOA estimation performance. However, such 2D super-resolution methods are limited by the requirement of an antenna array to obtain the channel space responses, and the assumption of quasi-linear phase variation property across the space dimension, which implies that the antenna array size should be small enough.
Without requiring an antenna array and suffering from the limitation of its relatively small size, a novel virtual antenna array and fractional Fourier transform (FRFT)-based 2D super-resolution TOA estimation method has been proposed in this paper. By using the built-in Kinect or inertial sensors in the mobile terminal (MT), the proposed method first obtains the CFRs at the equi-spaced positions on a line or quasi-line moving trajectory as the CFRs of a virtual antenna array. Meanwhile, considering that the size of virtual antenna array is not limited by the hardware and not precisely known, the channel multipaths’ phase variation across the space dimension is approximated by a chirp-like quadratic function, which is more reasonable than a traditional linear function. Based on the CFRs of a virtual antenna array, the proposed method employs the FRFT [
13] to separate and extract multipath components in CFRs by exploiting the property of the chirp’s energy concentration in the FRFT domain [
14], then it uses the existing time-delay estimation methods, such as the IFT method and the MP method [
9], to estimate the TOAs of the separated multipaths. Therefore, by employing the virtual antenna array idea, modeling the multipath phase variation as a quadratic function, the proposed FRFT-based algorithm can make more use of the multipaths’ characteristics in the space domain and achieve more robust TOA estimation performance without requiring an antenna array.
The main contributions of this paper are as follows: (1) We present a novel virtual antenna array system model for positioning by regarding the CFRs at the equi-spaced positions on a line or quasi-line moving trajectory, which can be obtained by using built-in Kinect or inertial sensors in the MT, as CFRs of a virtual antenna array. (2) The channel multipaths’ phase variation across the space dimension is modeled as a chirp-like quadratic function instead of a traditional linear function. Due to being high-order approximation, the chirp-like quadratic function suffers from much less multipath phase model mismatch error for the unlimited and unspecified size of virtual antenna arrays. (3) An FRFT-based 2D super-resolution TOA estimation method has been proposed. By exploiting the chirp’s energy concentration property in the FRFT domain, the FRFT is employed to separate chirp-like multipath components in the space domain, then the existing TOA estimation methods, such as the IFT method and the MP method [
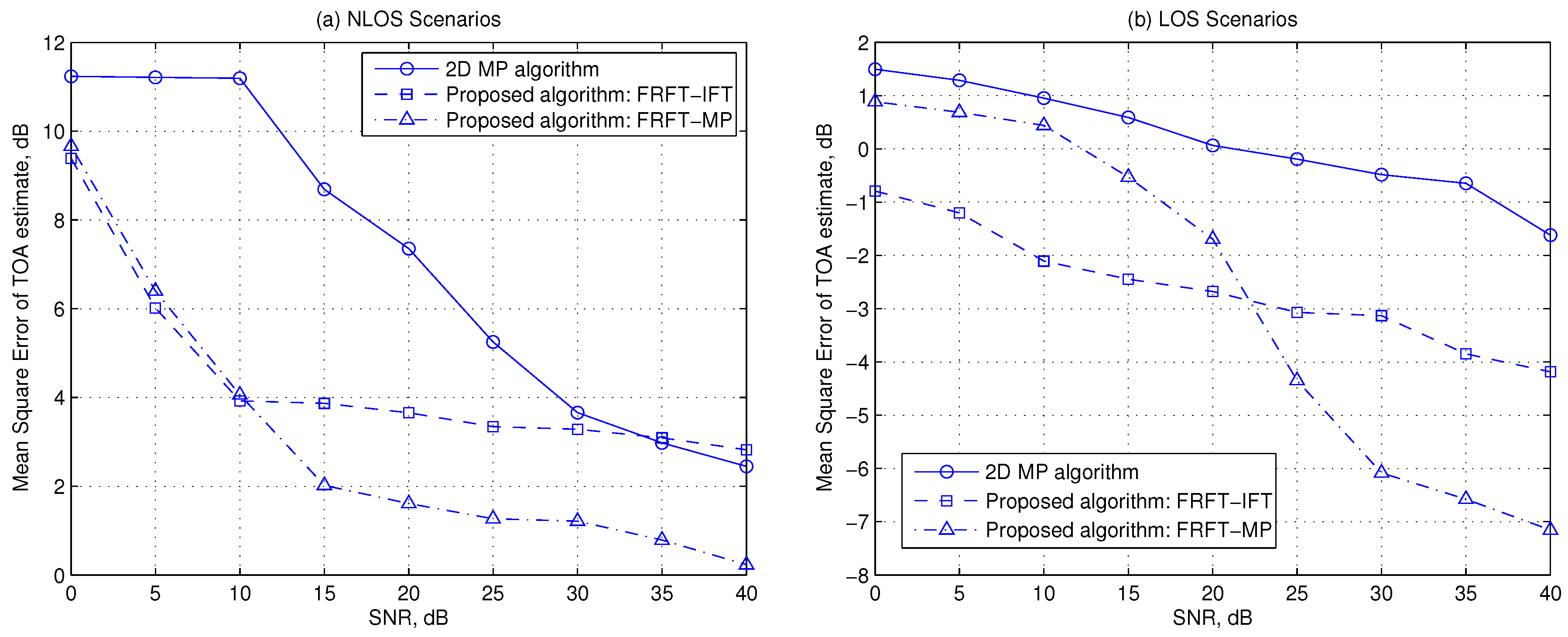
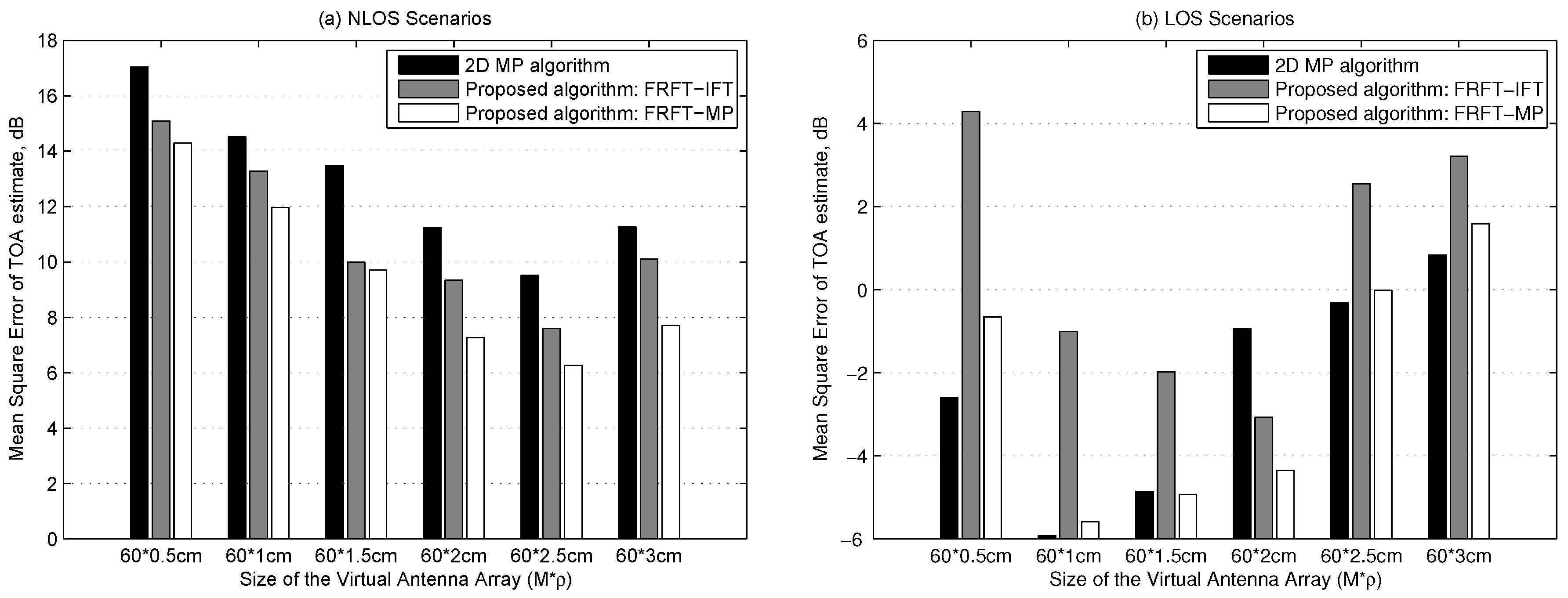
9], are used to obtain multipaths’ TOA estimate. Thus, the FRFT-IFT algorithm and the FRFT-MP algorithm have been developed. (4) Simulation results demonstrate that the proposed method can achieve more robust TOA estimation performance than the 2D MP super-resolution TOA estimation method due to making more of the multipaths’ characteristics in the space domain.
The rest of the paper is organized as follows. In
Section 2, the virtual antenna array system model is described. In
Section 3, the properties of multipath components in the CFRs of a virtual antenna array will be analyzed first by FRFT, and a novel FRFT-based TOA estimation algorithm will be then developed based on these properties. Simulation results are presented in
Section 4 to evaluate the performance of the proposed method. Finally, conclusions are drawn in
Section 5.
2. Virtual Antenna Array System Model
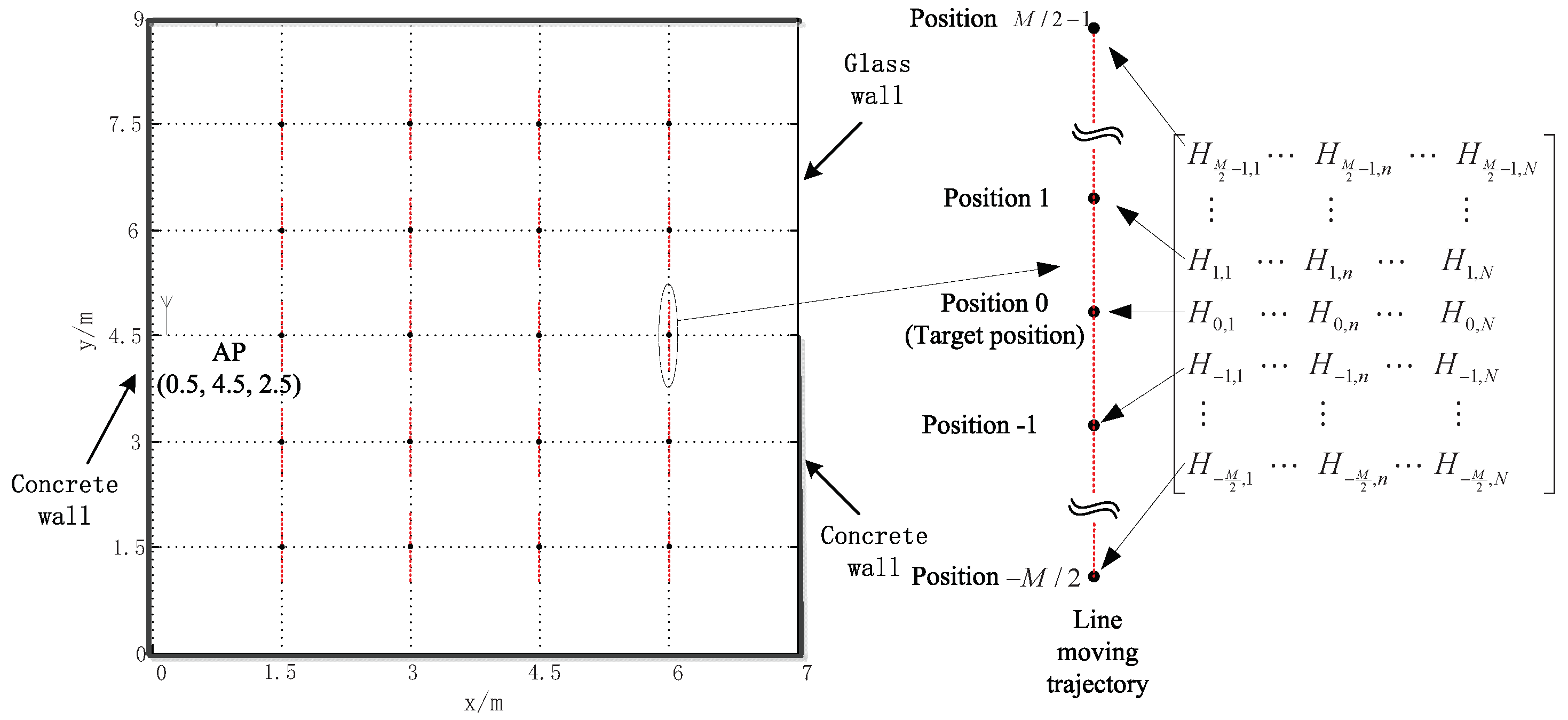
For ease of exposition, we consider a basic OFDM WLAN system with single AP (Access Point) and single MT. The following system model can be extended directly to the WLAN system with multiple APs and multiple MTs. Suppose that the MT moves in a straight-line or quasi-straight-line during a short period, which is usually the case with pedestrians‘ walking way in indoor environments. If the MT’s acceleration, which can be measured by built-in Kinect or inertial sensors in the MT [
15], is smaller than a chosen threshold, the MT can be assumed to make uniform linear motion with its speed imprecisely estimated due to the accumulated error. By simply taking positions at
M equi-interval moments during such short period of relatively small acceleration or even employing the pedestrian dead reckoning method [
16,
17], we can obtain
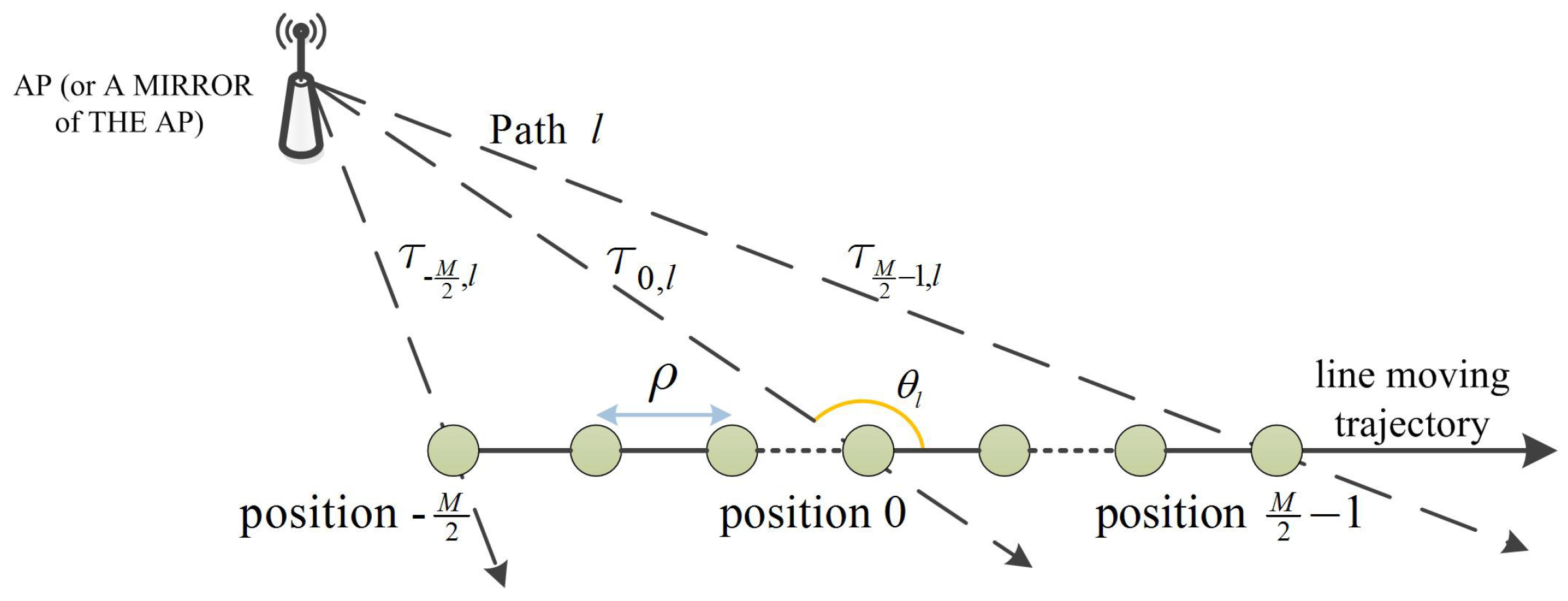
M equi-spaced positions on a straight-line or quasi-straight-line moving trajectory of the MT and regard the CFRs at such positions as the CFRs of a virtual antenna array. Suppose the central position of the trajectory as the position of interest and call the CFRs at the
M positions on the trajectory as the CFRs of a virtual antenna array at this target position. Denote the distance between adjacent positions as
, i.e., the virtual antenna array element spacing, which is assumed constant but not precisely estimated due to the imprecisely estimated speed and the negligible incremental accumulated error in a short period. The channel impulse response (CIR) between the AP and the MT at the
m-th position of the moving trajectory is given by [
9]
where
L is the number of distinct propagation paths,
and
are the complex gain and the TOA of the
l-th path, respectively,
is the array response of the mth antenna to the
l-th path.
Assume the direction of arrival (DOA) relative to the moving trajectory of the
lth path at the central position, i.e., the 0-th position on the trajectory as
, which is shown in
Figure 1, we have
where
c is the speed of light, the approximation holds if the virtual antenna array size
is deliberately chosen to satisfy
. This approximation is obtained by using second order Taylor series expansion, thus it is more reasonable than the conventional linear function, i.e., the first order Taylor series expansion of
, considering the size of the virtual antenna array is unspecified and not limited by the hardware.
From (1) and (2), the estimated CFR for the
nth subcarrier and the
m-th position on the moving trajectory at the receiver side can be expressed as
as in [
10], where
is the carrier angular frequency,
,
N and
denote the OFDM subcarrier spacing, the subcarrier number and the additive white Gaussian noise (AWGN), respectively. For simplicity, the CFR can be also written as
where
3. Fractional Fourier Transform Based TOA Estimation
It can be observed from (4) that the phases of multipath components in CFRs across the frequency dimension vary linearly, while the phase variations of multipath components in CFRs across the space dimension approximate quadratic functions, in other words, the CFRs over the space dimension can be equivalently viewed as L superimposed chirp-like multipath components. Consequently, the FRFT in the space domain and the frequency domain processing method, such as the IFT or MP method, can be jointly employed to extract multipath components’ parameters.
In this section, the multipath components of the CFRs will be analyzed first by employing FRFT across the space dimension, and a novel FRFT-based multipath TOA estimation algorithm will be then developed.
3.1. Properties of Multipath Components in FRFT Domain
To separate and extract the chirp-like components, a typical discrete fractional Fourier transform (DFRFT) [
18] will be implemented on the CFRs at each subcarrier across the space dimension as
where
and
p is the FRFT order,
,
denotes the DFRFT operation of order
,
is the transformed AWGN by DFRFT.
By substituting (4) into the first part of (6), the noise-free transformed CFRs by DFRFT can be expressed as
Define the DFRFT signal in (7) contributed only by the
l-th multipath component as
where
Then it can be derived that possesses the following properties.
Property 1. Due to the chirp’s energy concentration property in the DFRFT domain [14], has a distinguishable peak in the plane, the peak, and its coordinate correspond to Property 2. It can be proved that achieves its maximum value at , i.e.,and decreases rapidly with or increasing (See Appendix A for the derivation). Property 3. It can also be proved that if the Euclidean distance between any two of is sufficiently large, has L distinguishable peaks corresponding to the L multipath components in the plane and the peaks’ coordinates correspond to (See Appendix B for the derivation). 3.2. DFRFT Based Multipath TOA Estimation
Based on the above properties of multipath components in (8), the parameters of multipath components can be estimated through searching for the peaks of CFRs in the FRFT domain. However, the estimation error caused by interferences and/or AWGN cannot be neglected in cases of insufficiently large virtual antenna size or at low SNRs.
Due to the Property 3 above, an averaging method over
N subcarriers can be used to reduce the estimation error caused by noise. Furthermore, a successive interference cancellation (SIC) method can be employed to mitigate the interference effects as in [
19]. Thus, the parameters of multipath components will be obtained by combining the SIC method and the averaging method.
Without loss of generality, we assume that the amplitudes of L paths in the channel satisfy . Considering the SIC and averaging-based multipath parameters estimation is composed of similar iterative steps, only the steps in the -th iteration are exemplified as follows. Assume the initial filtered CFRs .
3.2.1. Searching for the Peak
Given the filtered CFRs
in the
-th step, the peak of
in the
plane at the
-th iteration can be expressed as
The estimated peak corresponds to the strongest multipath component in the filtered CFRs
, i.e., the
-th strongest multipath component in the CFRs
. According to the Property 3 above, it approximates the peak of the DFRFT of the
-th multipath component at the
-th subcarrier in the
plane.
Since the DFRFT transformed signal for each subcarrier means averaging the noise over M positions on the trajectory and the summation averages the noise energy over N subcarriers, contains the averaged noise energy across both the frequency and space dimensions, thus the noise effects on the estimation can be reduced greatly considering that the subcarrier number and the number of the virtual antenna array elements are usually large.
From (5) and (9), the peak of the DFRFT of the
-th multipath component at the
n-th subcarrier in the
plane can be derived as
3.2.2. Estimating the TOA of the Strongest Multipath
From the relationship between the peaks of the DFRFT of the CFRs and the parameters of
L multipath-chirp components in (7), the peak of the DFRFT at the
n-th subcarrier is compensated as
where the approximation holds since the first
strongest multipath component are almost removed in the previous
iterations, the first term in the right hand represents the compensated DFRFT of the strongest multipath component,
and
are the compensated and filtered AWGN and interferences caused by the remaining multipath components, respectively.
By substituting (5) into (14), the compensated DFRFT at the peak
in (14) can be further expressed as
with
From (15), can be viewed as a new channel frequency response at the n-th subcarrier. Due to the energy concentration property of DFRFT and the uniformly distributed noise in the DFRFT domain, the strongest multipath component dominates the compensated DFRFT of the n-th subcarrier at the peak . Hence, this new channel has a dominated multipath of interest, which has the same TOA as the multipath.
Therefore, the existing TOA estimation methods, such as the IFT method or the MP-based method [
9], can then be directly used on
to obtain the estimate of the strongest multipath’s TOA in this iteration, which is denoted as
. Moreover, the estimate of the strongest multipath’s TOA is irrelevant to the virtual antenna array element spacing
from (16). It is worth mentioning, although the MP-based TOA estimation is susceptible to the noise, it can remove most interference in such new equivalent channel, especially at high SNRs.
3.2.3. Cancelling the Strongest Component
Furthermore, the filtered CFRs
at the
n-th subcarrier in the
-th step will be transformed by DFRFT of order
as
For each
u in a neighborhood of
,
is formed as a new equivalent CFR vector over
N subcarriers. Similarly, it can be derived from (7) that the
-th multipath component is dominant in such formed CFR vector. Again, the IFT or MP-based multipath parameters estimation method [
9] can be employed on such a CFR vector to obtain the TOA and the complex gain of its strongest multipath component, which are denoted as
and
. Consequently, the DFRFT at
u can be filtered by cancelling this strongest multipath component from such a CFR vector as
if the TOA estimate difference
is smaller than a chosen threshold.
Then the filtered DFRFT
is transformed back to the frequency domain by DFRFT of order
. Hence, the filtered CFRs in the
-th iteration can be expressed as
The above procedures will repeat until the amplitude of the detected multipath component is smaller than a certain threshold. Finally, the TOA of the direct multipath can be estimated as the minimum one among .


{kind=link}
{kind=link}
{kind=link}
{kind=link}



