LiDAR-Based 3D Scans of Soil Surfaces and Furrows in Two Soil Types

 , and
, and
Abstract
:1. Introduction
1.1. Background
1.1.1. Manual Soil Surface Measurements
1.1.2. LiDAR and Camera-Based Soil Surface Sensing
2. Materials and Methods
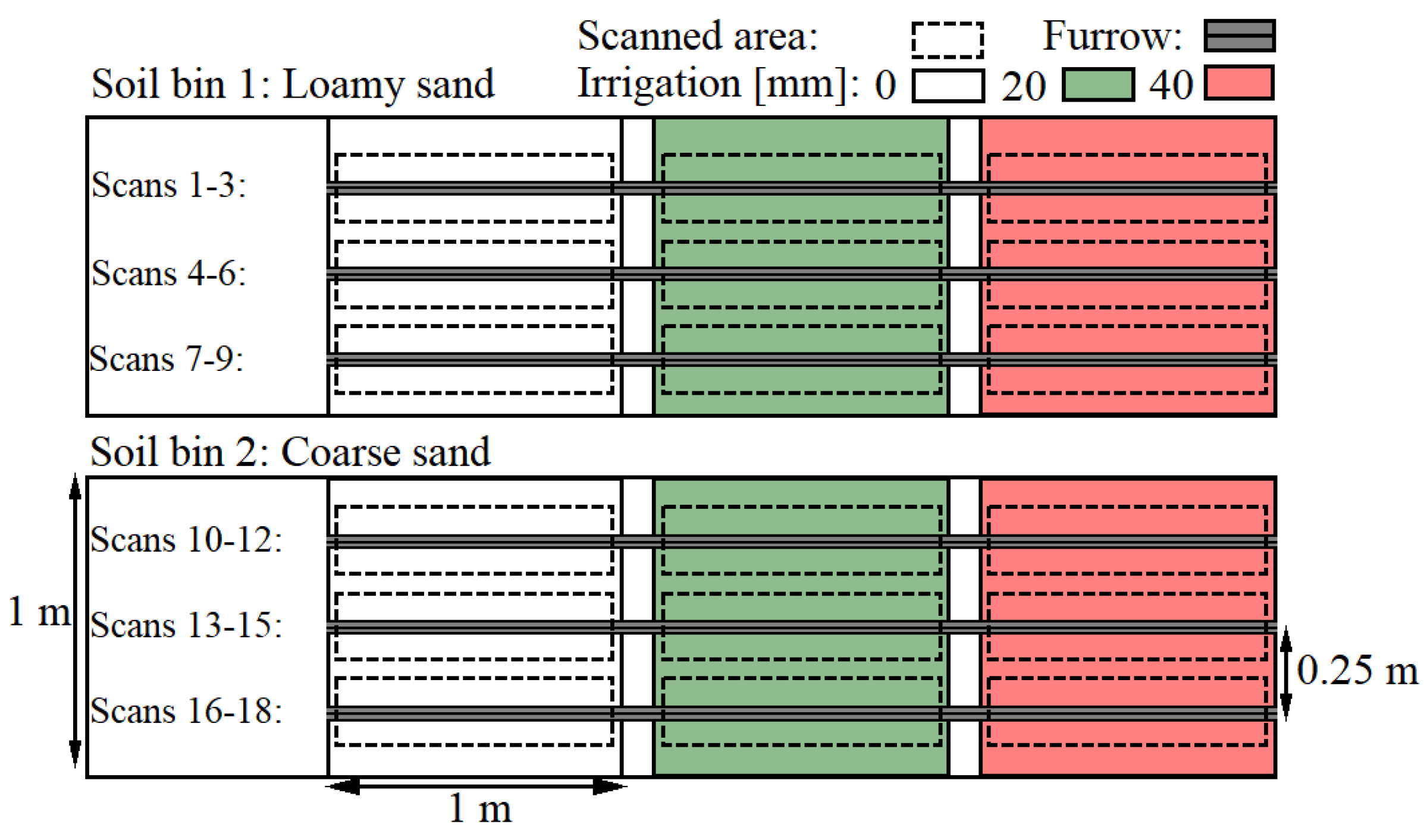
2.1. Experimental Settings
2.2. LiDAR-Based Soil Surface Measurement Unit
2.3. Furrow Cross-Sectional Geometry and Area Measurements
2.3.1. LiDAR Measurements
2.3.2. Pinboard Measurements
3. Results and Discussion
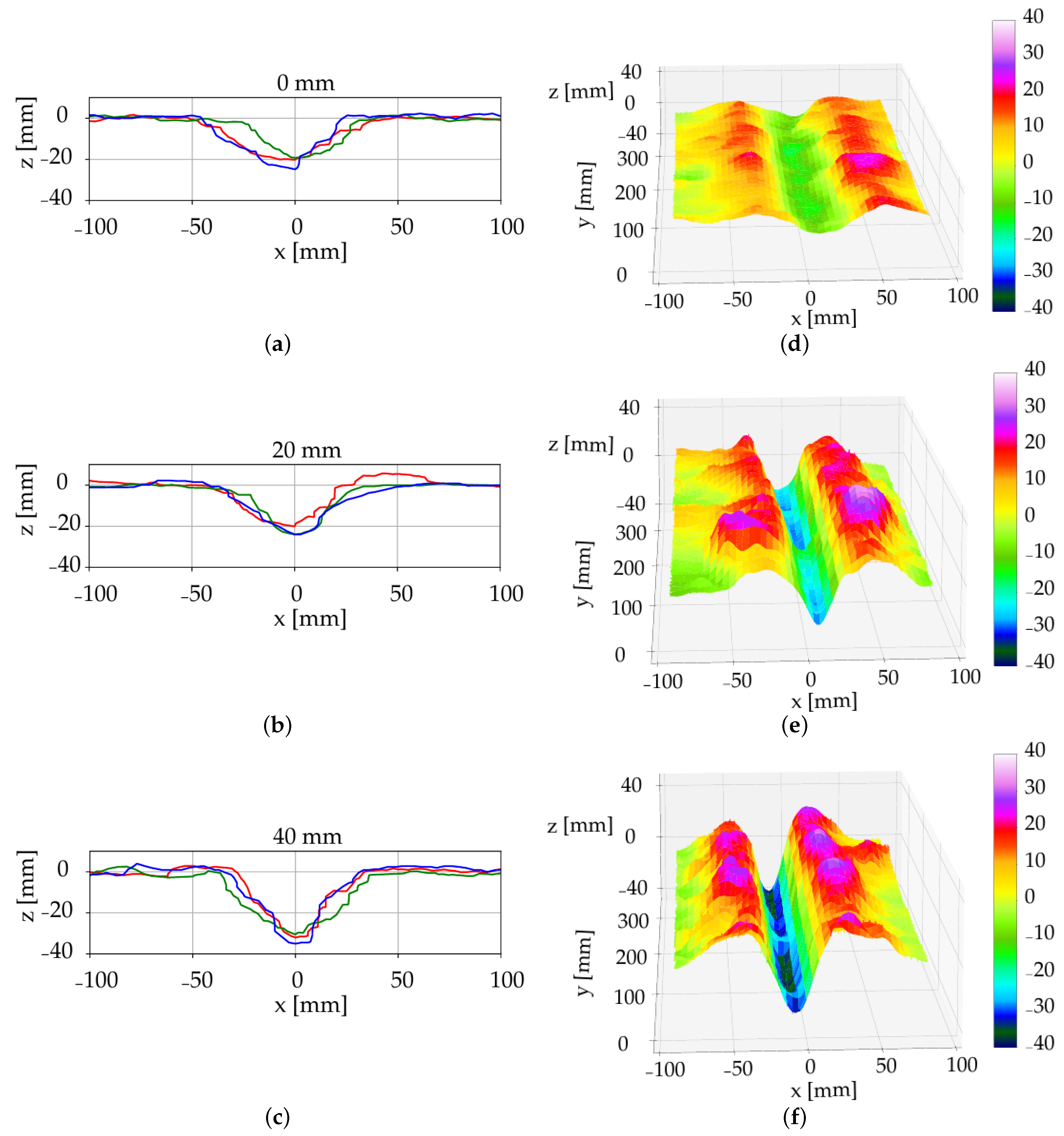
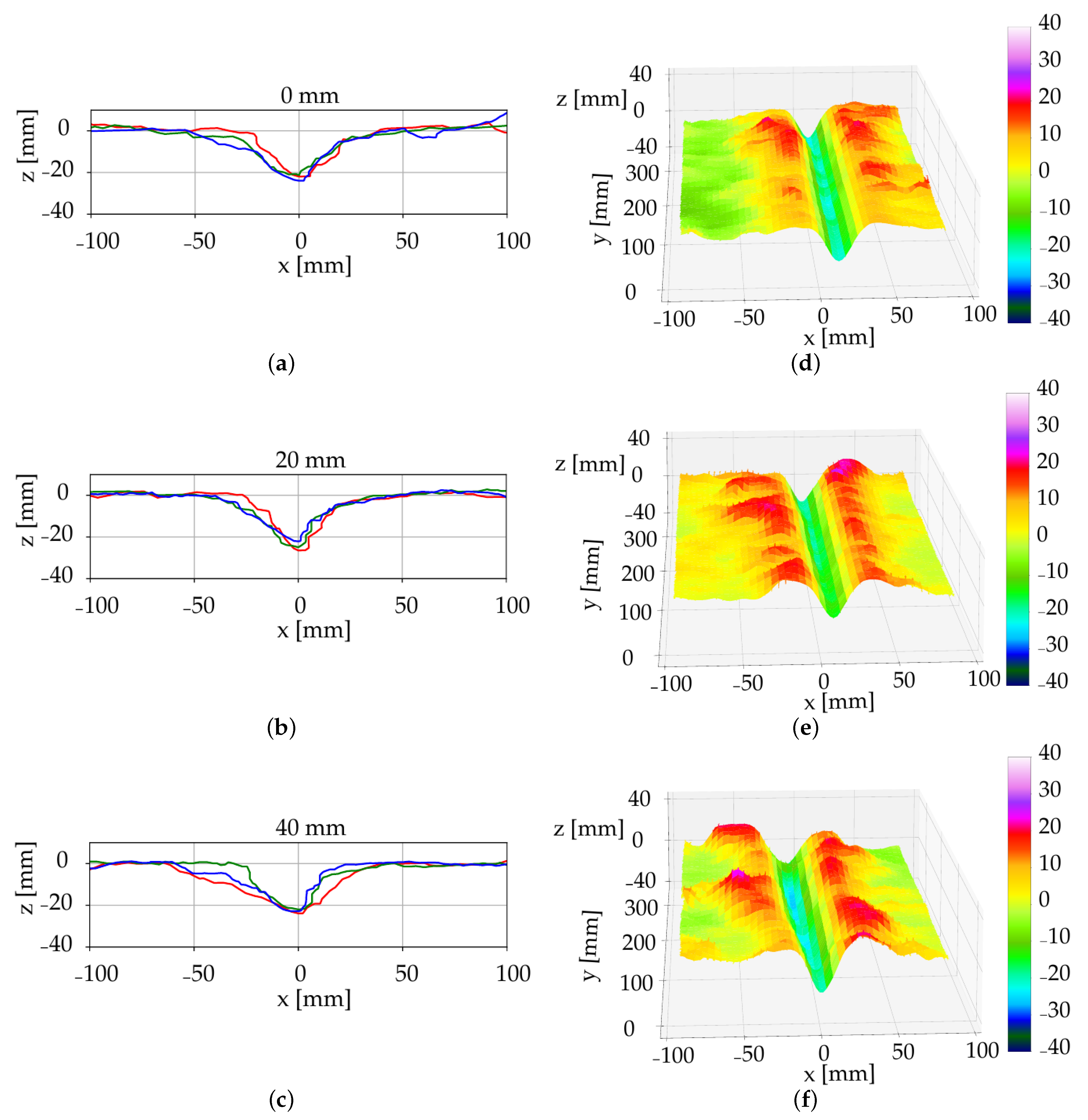
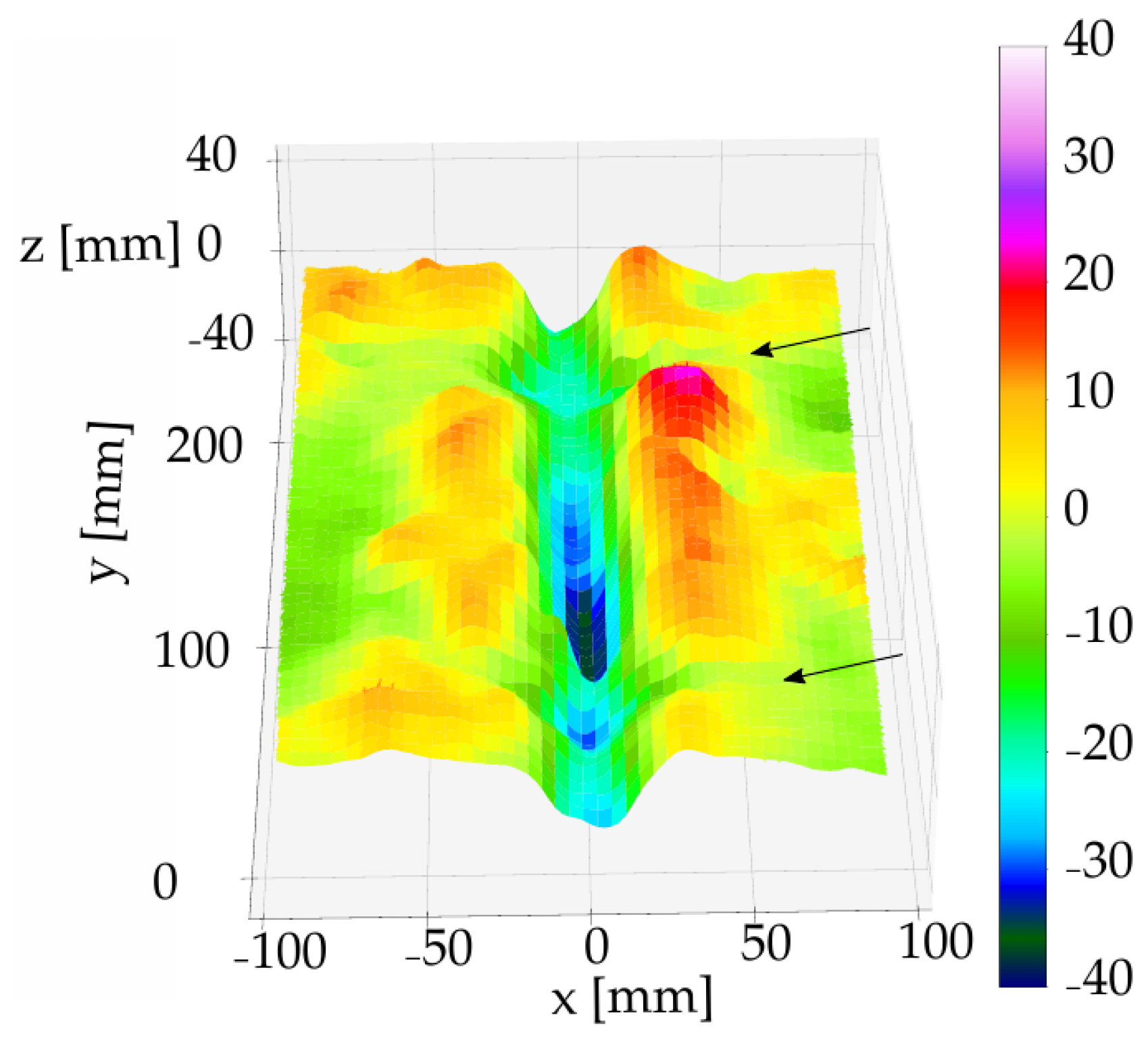
3.1. 2D and 3D Soil Surface Profiles
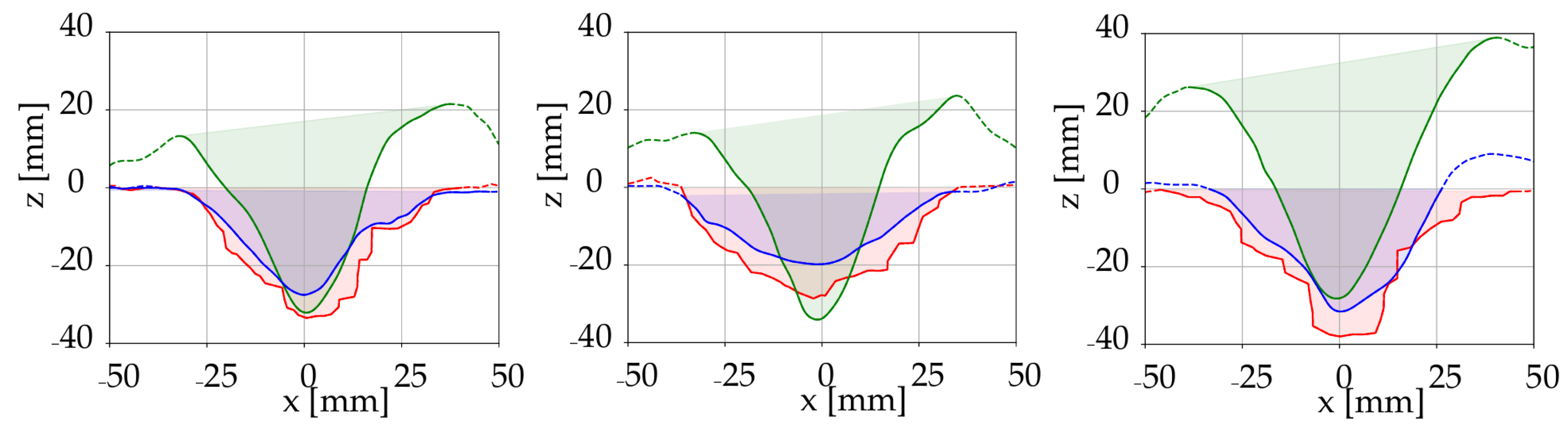
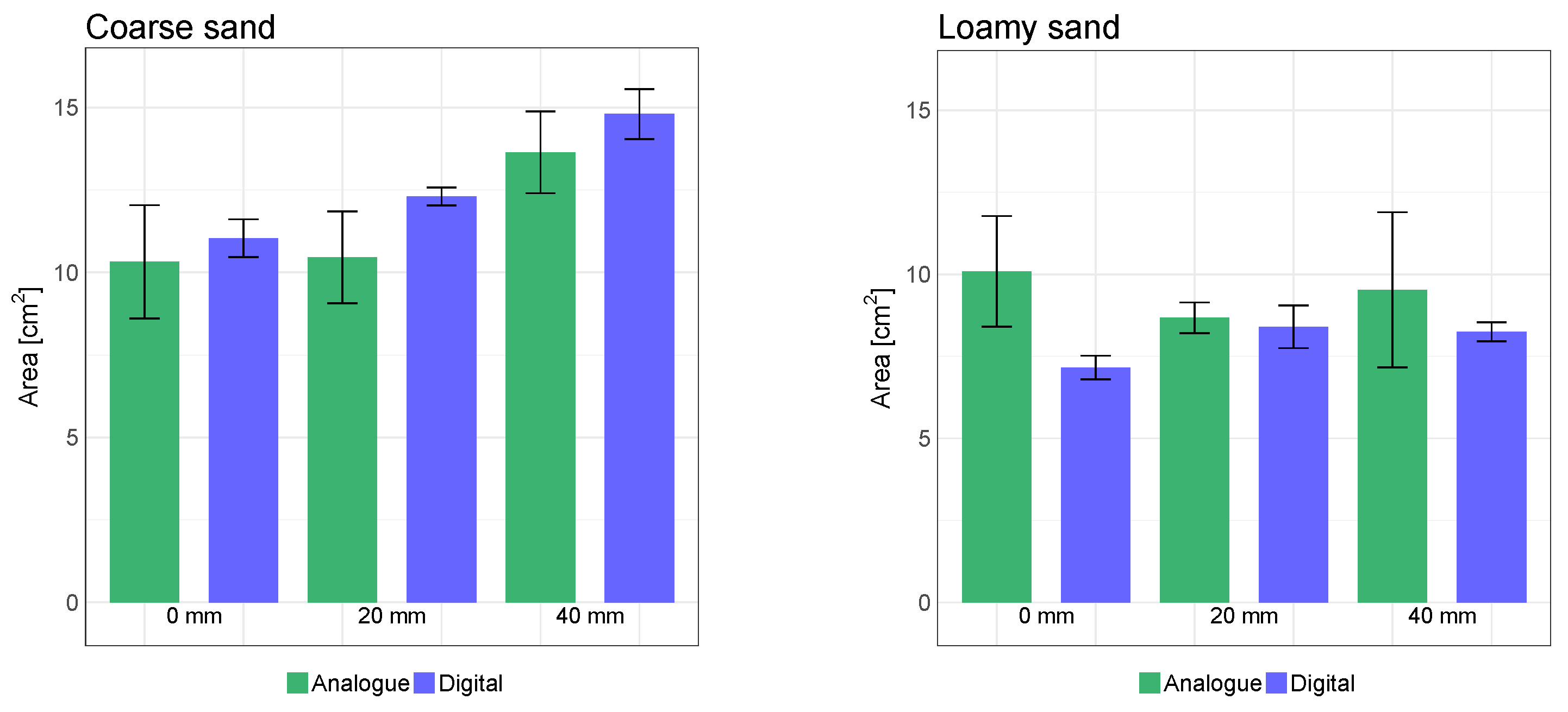
3.2. Furrow Area Measurements
3.3. Impact Analysis of Pinboard Measurement
4. Conclusions
- (i)
- The geometric variations in the direction of the furrow were observed by increasing the resolution from 2D pinboard measurements to 3D scans.
- (ii)
- The results indicated the importance of applying a non-contact method for accurate soil surface measurements in loose soils. The analogue furrow areas were below the LiDAR-based areas in coarse sand by up to 15% and for loamy sand, the analogue areas were above the LiDAR-based areas by up to 41%.
- (iii)
- An increase in the cross-sectional areas was measured using the LiDAR-based method, in coarse sand the area increased by 11% and 34% for the 20 and 40 mm irrigation compared to the dry coarse sand. In the loamy sand, the cross-sectional area of the furrow increased 17% and 15% by irrigation of 20 and 40 mm. However, more experiments are needed to fully evaluate these effects.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Tellaeche, A.; BurgosArtizzu, X.P.; Pajares, G.; Ribeiro, A.; Fernández-Quintanilla, C. A new vision-based approach to differential spraying in precision agriculture. Comput. Electron. Agric. 2008, 60, 144–155. [Google Scholar] [CrossRef]
- Viscarra Rossel, R.A.; Lobsey, C.R.; Sharman, C.; Flick, P.; McLachlan, G. Novel proximal sensing for monitoring soil organic C stocks and condition. Environ. Sci. Technol. 2017, 51, 5630–5641. [Google Scholar] [CrossRef] [PubMed]
- Jensen, T.; Karstoft, H.; Green, O.; Munkholm, L.J. Assessing the effect of the seedbed cultivator leveling tines on soil surface properties using laser range scanners. Soil Tillage Res. 2017, 167, 54–60. [Google Scholar] [CrossRef]
- Moreno, R.G.; Álvarez, M.C.; Alonso, A.T.; Barrington, S.; Requejo, A.S. Tillage and soil type effects on soil surface roughness at semiarid climatic conditions. Soil Tillage Res. 2008, 98, 35–44. [Google Scholar] [CrossRef]
- Bauer, T.; Strauss, P.; Grims, M.; Kamptner, E.; Mansberger, R.; Spiegel, H. Long-term agricultural management effects on surface roughness and consolidation of soils. Soil Tillage Res. 2015, 151, 28–38. [Google Scholar] [CrossRef]
- Thomsen, L.M.; Baartman, J.E.M.; Barneveld, R.J.; Starkloff, T.; Stolte, J. Soil surface roughness: comparing old and new measuring methods and application in a soil erosion model. Soil 2015, 1, 399–410. [Google Scholar] [CrossRef]
- Jester, W.; Klik, A. Soil surface roughness measurement - Methods, applicability, and surface representation. Catena 2005, 64, 174–192. [Google Scholar] [CrossRef]
- Milkevych, V.; Munkholm, L.J.; Chen, Y.; Nyord, T. Modelling approach for soil displacement in tillage using discrete element method. Soil Tillage Res. 2018, 183, 60–71. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, Y. Soil disturbance and cutting forces of four different sweeps for mechanical weeding. Soil Tillage Res. 2017, 168, 167–175. [Google Scholar] [CrossRef]
- Kuipers, H. A relief meter for soil cultivation studies. Neth. J. Agric. Sci. 1957, 5, 255–262. [Google Scholar]
- Saleh, A. Soil roughness measurement: chain method. J. Soil Water Conserv. 1993, 48, 527–529. [Google Scholar]
- Wolock, D.M.; Price, C.V. Effects of digital elevation model map scale and data resolution on a topography-based watershed model. Water Resour. Res. 1994, 30, 3041–3052. [Google Scholar] [CrossRef]
- Oz, I.; Arav, R.; Filin, S.; Assouline, S.; Furman, A. High-Resolution Measurement of Topographic Changes in Agricultural Soils. Vadose Zone J. 2017, 16. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Eltner, A.; Maas, H.G.; Faust, D. Soil micro-topography change detection at hillslopes in fragile Mediterranean landscapes. Geoderma 2018, 313, 217–232. [Google Scholar] [CrossRef]
- Snapir, B.; Hobbs, S.; Waine, T.W. Roughness measurements over an agricultural soil surface with Structure from Motion. ISPRS J. Photogramm. Remote Sens. 2014, 96, 210–223. [Google Scholar] [CrossRef]
- Smith, K.A.; Jackson, D.R.; Misselbrook, T.H.; Pain, B.F.; Johnson, R.A. Reduction of ammonia emission by slurry application techniques. J. Agric. Eng. Res. 2000, 77, 277–287. [Google Scholar] [CrossRef]
- Wulf, S.; Maeting, M.; Clemens, J. Application technique and slurry co-fermentation effects on ammonia, nitrous oxide, and methane emissions after spreading. J. Environ. Qual. 2002, 31, 1795–1801. [Google Scholar] [CrossRef]
- Webb, J.; Sørensen, P.; Velthof, G.; Amon, B.; Pinto, M.; Rodhe, L.; Salomon, E.; Hutchings, N.; Burczyk, P.; Reid, J. An assessment of the variation of manure nitrogen efficiency throughout Europe and an appraisal of means to increase manure-N efficiency. In Advances in Agronomy; Elsevier: Amsterdam, The Netherlands, 2013; Volume 119, pp. 371–442. [Google Scholar]
- Ram, D.N.; Zwerman, P. A convenient soil compaction integrator. Agron. J. 1960, 52. [Google Scholar] [CrossRef]
- Burwell, R.E.; Allmaras, R.R.; Amemiya, M. A field measurement of total porosity and surface microrelief of soils. Soil Sci. Soc. Am. Proc. 1963, 27, 697–700. [Google Scholar] [CrossRef]
- Moreno, R.G.; Álvarez, M.C.D.; Requejo, A.S.; Tarquis, A.M. Multifractal Analysis of Soil Surface Roughness. Vadose Zone J. 2008, 7, 512. [Google Scholar] [CrossRef]
- Kornecki, T.S.; Fouss, J.L.; Prior, S.A. A portable device to measure soil erosion/deposition in quarter-drains. Soil Use Manag. 2008, 24, 401–408. [Google Scholar] [CrossRef]
- Foldager, F.F.; Larsen, P.G.; Green, O. Development of a Driverless Lawn Mower Using Co-Simulation; Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2018; Volume 10729 LNCS, pp. 330–344. [Google Scholar]
- Garrido, M.; Paraforos, D.S.; Reiser, D.; Arellano, M.V.; Griepentrog, H.W.; Valero, C. 3D maize plant reconstruction based on georeferenced overlapping lidar point clouds. Remote Sens. 2015, 7, 17077–17096. [Google Scholar] [CrossRef]
- Harral, B.B.; Cove, C.A. Development of an optical displacement transducer for the measurement of soil surface profiles. J. Agric. Eng. Res. 1982, 27, 421–429. [Google Scholar] [CrossRef]
- Frede, H.G.; Gäth, S. Soil surface roughness as the result of aggregate size distribution 1. report: Measuring and evaluation method. Z. Pflanzenernähr. Bodenkd. 1995, 158, 31–35. [Google Scholar] [CrossRef]
- Darboux, F.; Huang, C.H. An Instantaneous-Profile Laser Scanner to Measure Soil Surface Microtopography. Soil Sci. Soc. Am. J. 2003, 67, 92. [Google Scholar] [CrossRef]
- Verhoest, N.E.; Lievens, H.; Wagner, W.; Álvarez-Mozos, J.; Moran, M.S.; Mattia, F. On the soil roughness parameterization problem in soil moisture retrieval of bare surfaces from synthetic aperture radar. Sensors 2008, 8, 4213–4248. [Google Scholar] [CrossRef]
- Turner, R.; Panciera, R.; Tanase, M.A.; Lowell, K.; Hacker, J.M.; Walker, J.P. Estimation of soil surface roughness of agricultural soils using airborne LiDAR. Remote Sens. Environ. 2014, 140, 107–117. [Google Scholar] [CrossRef]
- Rice, C.; Wilson, B.N.; Appleman, M. Soil topography measurements using image processing techniques. Comput. Electron. Agric. 1988, 3, 97–107. [Google Scholar] [CrossRef]
- Eltz, F.L.F.; Norton, L.D. Surface roughness changes as affected by rainfall erosivity, tillage, and canopy cover. Soil Sci. Soc. Am. J. 1997, 61, 1746–1755. [Google Scholar] [CrossRef]
- Nouwakpo, S.K.; Huang, C.H. A Simplified Close-Range Photogrammetric Technique for Soil Erosion Assessment. Soil Sci. Soc. Am. J. 2012, 76, 70. [Google Scholar] [CrossRef]
- Raper, R.L.; Grift, T.E.; Tekeste, M.Z. A Portable Tillage Profiler for Measuring Subsoiling Disruption. Trans. ASAE 2004, 47, 23–27. [Google Scholar] [CrossRef]
- Arvidsson, J.; Bölenius, E. Effects of soil water content during primary tillage—laser measurements of soil surface changes. Soil Tillage Res. 2006, 90, 222–229. [Google Scholar] [CrossRef]
- Jensen, T.; Green, O.; Munkholm, L.J.; Karstoft, H. Fourier and granulometry methods on 3D images of soil surfaces for evaluating soil aggregate size distribution. Appl. Eng. Agric. 2016, 32, 609–615. [Google Scholar] [CrossRef]
- Huang, C.H.; Bradford, J.M. Portable Laser Scanner for Measuring Soil Surface Roughness. Soil Sci. Soc. Am. J. 1990, 54, 1402. [Google Scholar] [CrossRef]
- Huang, C.; Bradford, J. Applications of a laser scanner to quantify soil microtopography. Soil Sci. Soc. Am. J. 1992, 56, 14–21. [Google Scholar] [CrossRef]
- Warner, W.S. Mapping a three-dimensional soil surface with hand-held 35 mm photography. Soil Tillage Res. 1995, 34, 187–197. [Google Scholar] [CrossRef]
- Rieke-Zapp, D.H.; Nearing, M.A. Digital close range photogrammetry for measurement of soil erosion. Photogramm. Rec. 2005, 20, 69–87. [Google Scholar] [CrossRef]
- Taconet, O.; Ciarletti, V. Estimating soil roughness indices on a ridge-and-furrow surface using stereo photogrammetry. Soil Tillage Res. 2007, 93, 64–76. [Google Scholar] [CrossRef]
- Gilliot, J.M.; Vaudour, E.; Michelin, J. Soil surface roughness measurement: A new fully automatic photogrammetric approach applied to agricultural bare fields. Comput. Electron. Agric. 2017, 134, 63–78. [Google Scholar] [CrossRef]
- Nyord, T.; Kristensen, E.F.; Munkholm, L.J.; Jørgensen, M.H. Design of a slurry injector for use in a growing cereal crop. Soil Tillage Res. 2010, 107, 26–35. [Google Scholar] [CrossRef]
- Manevski, K.; Børgesen, C.D.; Andersen, M.N.; Kristensen, I.S. Reduced nitrogen leaching by intercropping maize with red fescue on sandy soils in North Europe: A combined field and modeling study. Plant Soil 2015, 388, 67–85. [Google Scholar] [CrossRef]
- Olesen, J.E.; Askegaard, M.; Rasmussen, I.A. Design of an organic farming crop-rotation experiment. Acta Agric. Scand. Sect. B Soil Plant Sci. 2000, 50, 13–21. [Google Scholar] [CrossRef]
- Pandey, A.; Li, F.; Askegaard, M.; Rasmussen, I.A.; Olesen, J.E. Nitrogen balances in organic and conventional arable crop rotations and their relations to nitrogen yield and nitrate leaching losses. Agric. Ecosyst. Environ. 2018, 265, 350–362. [Google Scholar] [CrossRef]
- De Jonge, L.W.; Sommer, S.G.; Jacobsen, O.H.; Djurhuus, J. Infiltration of slurry liquid and ammonia volatilization from pig and cattle slurry applied to harrowed and stubble soils. Soil Sci. 2004, 169, 729–736. [Google Scholar] [CrossRef]
- Chen, Y.; Munkholm, L.J.; Nyord, T. A discrete element model for soil–sweep interaction in three different soils. Soil Tillage Res. 2013, 126, 34–41. [Google Scholar] [CrossRef]
- Burt, R. Soil Survey Field and Laboratory Methods Manual; Soil Survey Investigations Report No. 51, Version 1.0; United States Department of Agriculture: Washington, DC, USA, 2009; p. 407.
- Jensen, T.; Munkholm, L.; Green, O.; Karstoft, H. A mobile surface scanner for soil studies. In Proceedings of the Second International Conference on Robotics, Associated High-Technologies and Equipment for Agriculture and Forestry—RHEA 2014, Madrid, Spain, 21–23 May 2014; pp. 187–194. [Google Scholar]
- Znova, L.; Melander, B.; Lisowski, A.; Klonowski, J.; Chlebowski, J.; Edwards, G.T.; Kirkegaard Nielsen, S.; Green, O. A new hoe share design for weed control: measurements of soil movement and draught forces during operation. Acta Agric. Scand. Sect. B Soil Plant Sci. 2018, 68, 139–148. [Google Scholar] [CrossRef]
- Solhjou, A.; Fielke, J.M.; Desbiolles, J.M. Soil translocation by narrow openers with various rake angles. Biosyst. Eng. 2012, 112, 65–73. [Google Scholar] [CrossRef]
- Shmulevich, I. State of the art modeling of soil-tillage interaction using discrete element method. Soil Tillage Res. 2010, 111, 41–53. [Google Scholar] [CrossRef]
- Hafner, S.D.; Pacholski, A.; Bittman, S.; Burchill, W.; Bussink, W.; Chantigny, M.; Carozzi, M.; Génermont, S.; Häni, C.; Hansen, M.N.; et al. The ALFAM2 database on ammonia emission from field-applied manure: Description and illustrative analysis. Agric. Forest Meteorol. 2018, 258, 66–79. [Google Scholar] [CrossRef]
- Webb, J.; Pain, B.; Bittman, S.; Morgan, J. The impacts of manure application methods on emissions of ammonia, nitrous oxide and on crop response—A review. Agric. Ecosyst. Environ. 2010, 137, 39–46. [Google Scholar] [CrossRef]
- Rochette, P.; Guilmette, D.; Chantigny, M.H.; Angers, D.A.; MacDonald, J.D.; Bertrand, N.; Parent, L.É.; Côté, D.; Gasser, M.O. Ammonia volatilization following application of pig slurry increases with slurry interception by grass foliage. Can. J. Soil Sci. 2008, 88, 585–593. [Google Scholar] [CrossRef]
- Häni, C.; Sintermann, J.; Kupper, T.; Jocher, M.; Neftel, A. Ammonia emission after slurry application to grassland in Switzerland. Atmos. Environ. 2016, 125, 92–99. [Google Scholar] [CrossRef]
- Khorashahi, J.; Byler, R.K.; Dillaha, T.A. An opto-electronic soil profile meter. Comput. Electron. Agric. 1987, 2, 145–155. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Irrigation Level, mm | Loamy Sand | Coarse Sand | ||
|---|---|---|---|---|
| 0 | 0.13 (0.02) | a | 0.06 (0.00) | a |
| 20 | 0.16 (0.00) | a | 0.08 (0.01) | ab |
| 40 | 0.15 (0.03) | a | 0.10 (0.02) | b |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Foldager, F.F.; Pedersen, J.M.; Haubro Skov, E.; Evgrafova, A.; Green, O. LiDAR-Based 3D Scans of Soil Surfaces and Furrows in Two Soil Types. Sensors 2019, 19, 661. https://doi.org/10.3390/s19030661
Foldager FF, Pedersen JM, Haubro Skov E, Evgrafova A, Green O. LiDAR-Based 3D Scans of Soil Surfaces and Furrows in Two Soil Types. Sensors. 2019; 19(3):661. https://doi.org/10.3390/s19030661
Chicago/Turabian StyleFoldager, Frederik F., Johanna Maria Pedersen, Esben Haubro Skov, Alevtina Evgrafova, and Ole Green. 2019. "LiDAR-Based 3D Scans of Soil Surfaces and Furrows in Two Soil Types" Sensors 19, no. 3: 661. https://doi.org/10.3390/s19030661
APA StyleFoldager, F. F., Pedersen, J. M., Haubro Skov, E., Evgrafova, A., & Green, O. (2019). LiDAR-Based 3D Scans of Soil Surfaces and Furrows in Two Soil Types. Sensors, 19(3), 661. https://doi.org/10.3390/s19030661