Knowledge-Aided Structured Covariance Matrix Estimator Applied for Radar Sensor Signal Detection


Abstract
:1. Introduction
2. Problem Formulation
2.1. Data Model
2.2. Euclidean Mean
3. Proposed Estimators
- Persymmetric covariance matrix
- Symmetric covariance matrixFor a temporal steering and fixed radar sensor system, the symmetric property of the clutter power spectral density (PSD) is always present [21]. This structure information yields the estimateandwhere denotes the real part of .
- Toeplitz covariance matrixIf the data obtained by sampling a spatially stationary noise field with a uniform linear array, then the Toeplitz structure exists [50]. The Toeplitz structure covariance matrix can be calculated as [15]where is the correlation coefficient. is a Toeplitz matrix with . According to the ergodicity of a wide-sense stationary, the correlation coefficient of data can be calculated by averaging over time instead of its statistical expectation, aswhere is the nth element of ,
4. Performance Assessment
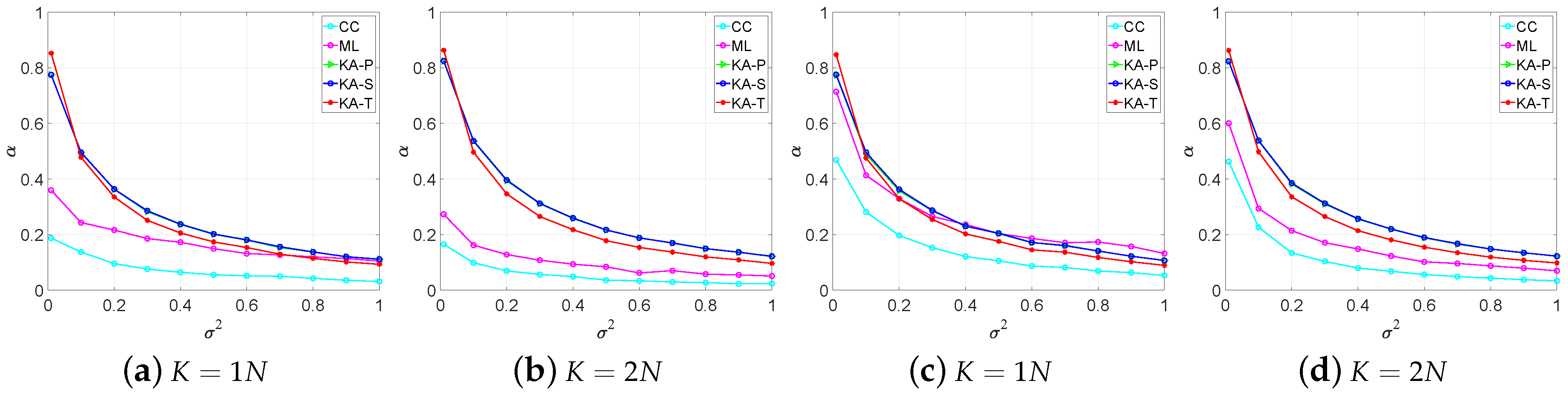
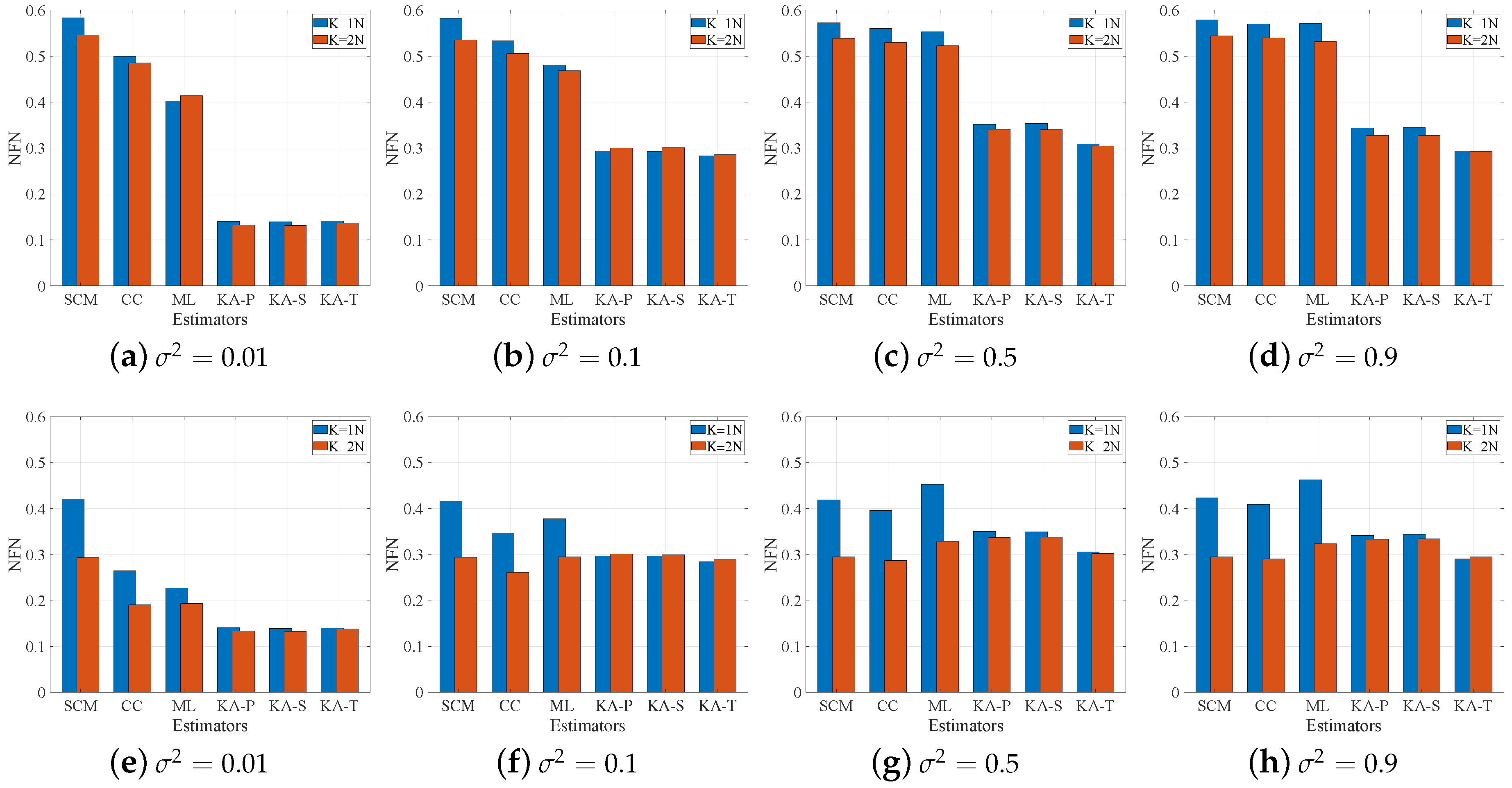
4.1. Estimation Performance
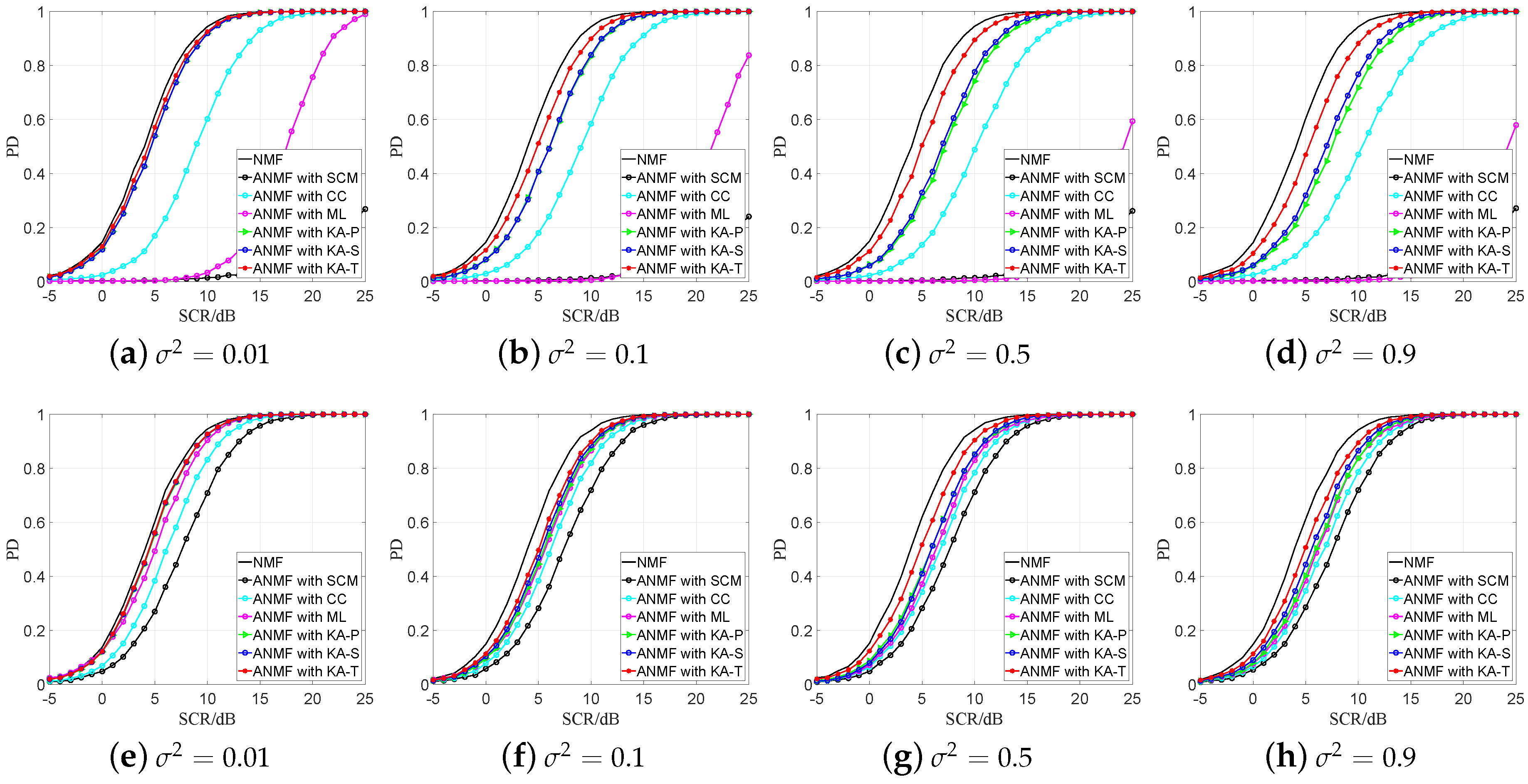
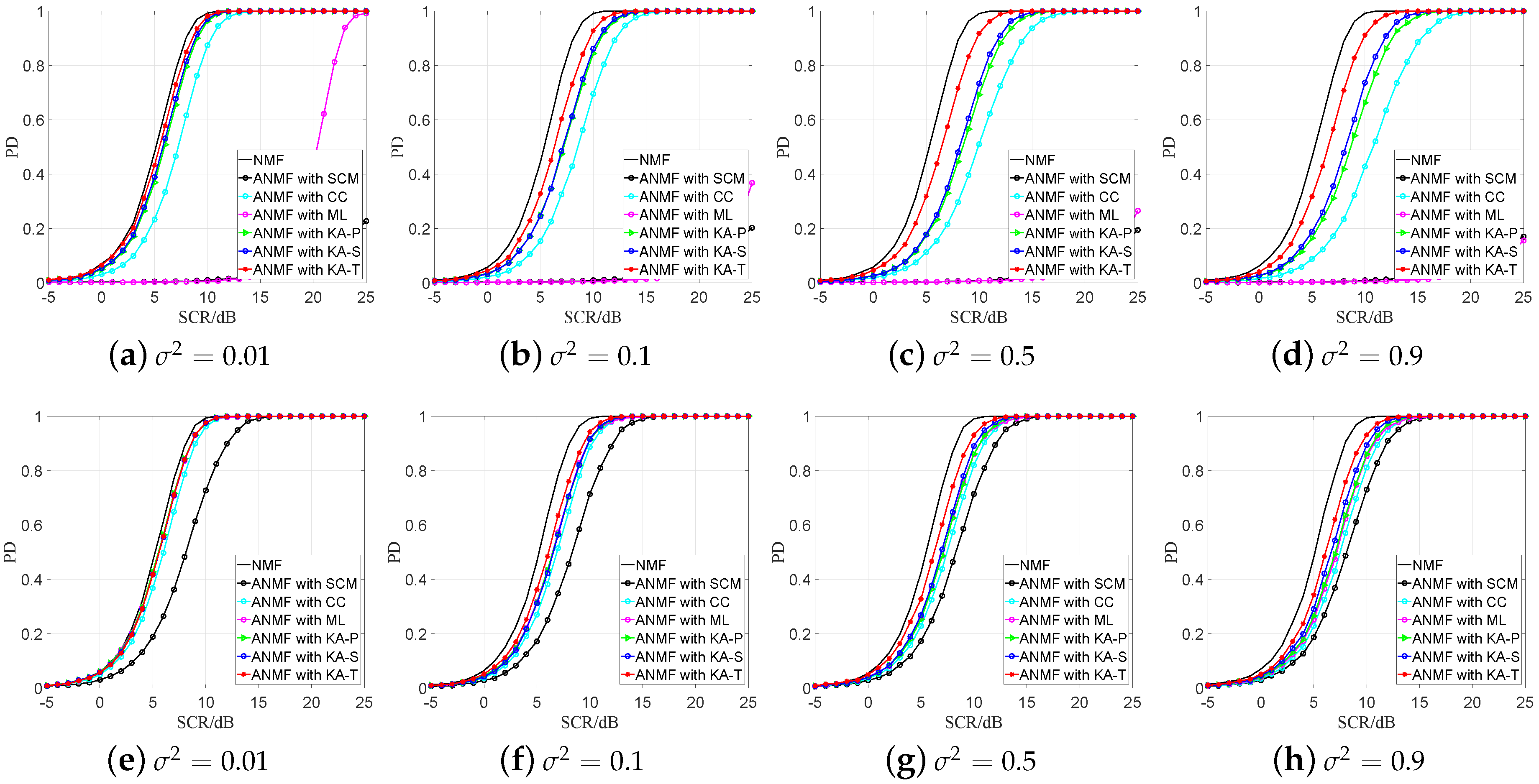
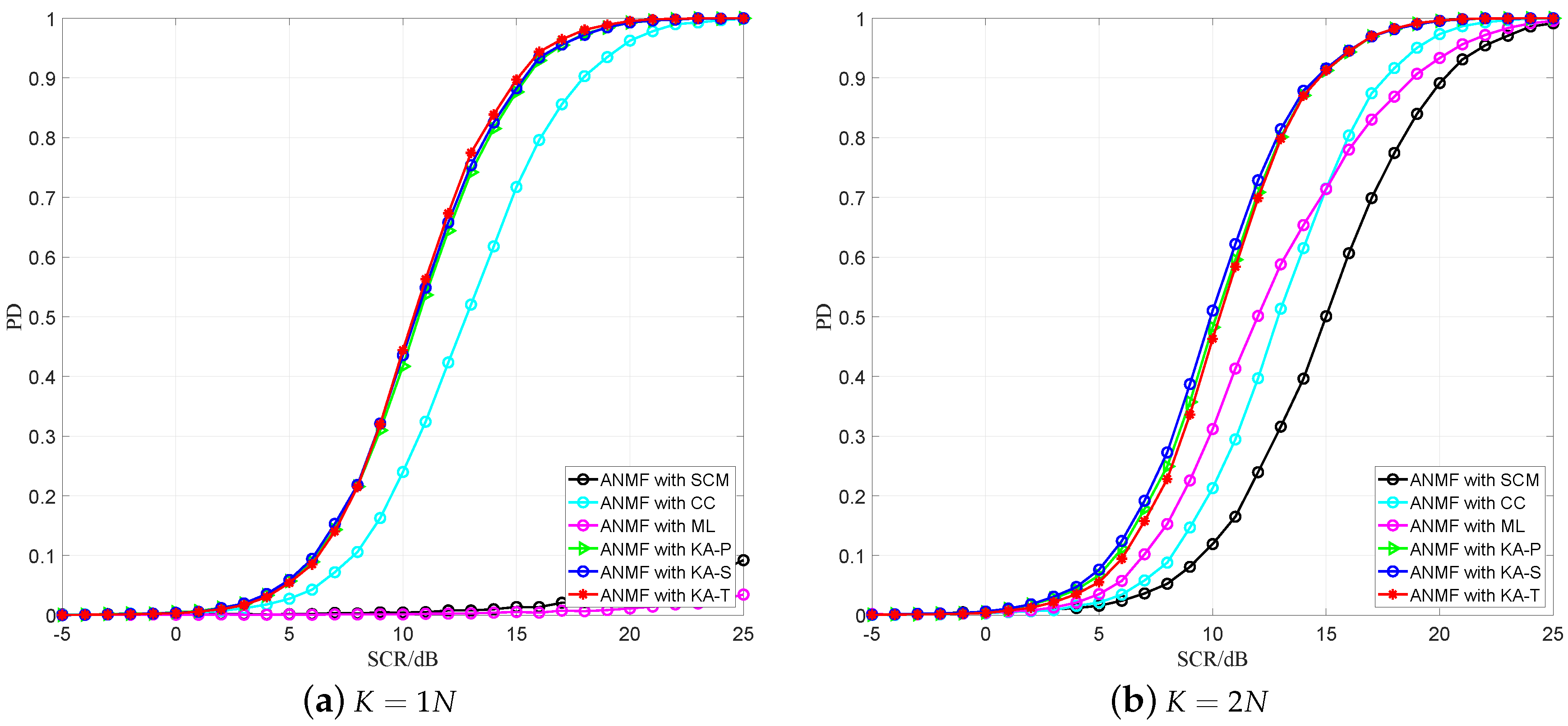
4.2. Detection Performance
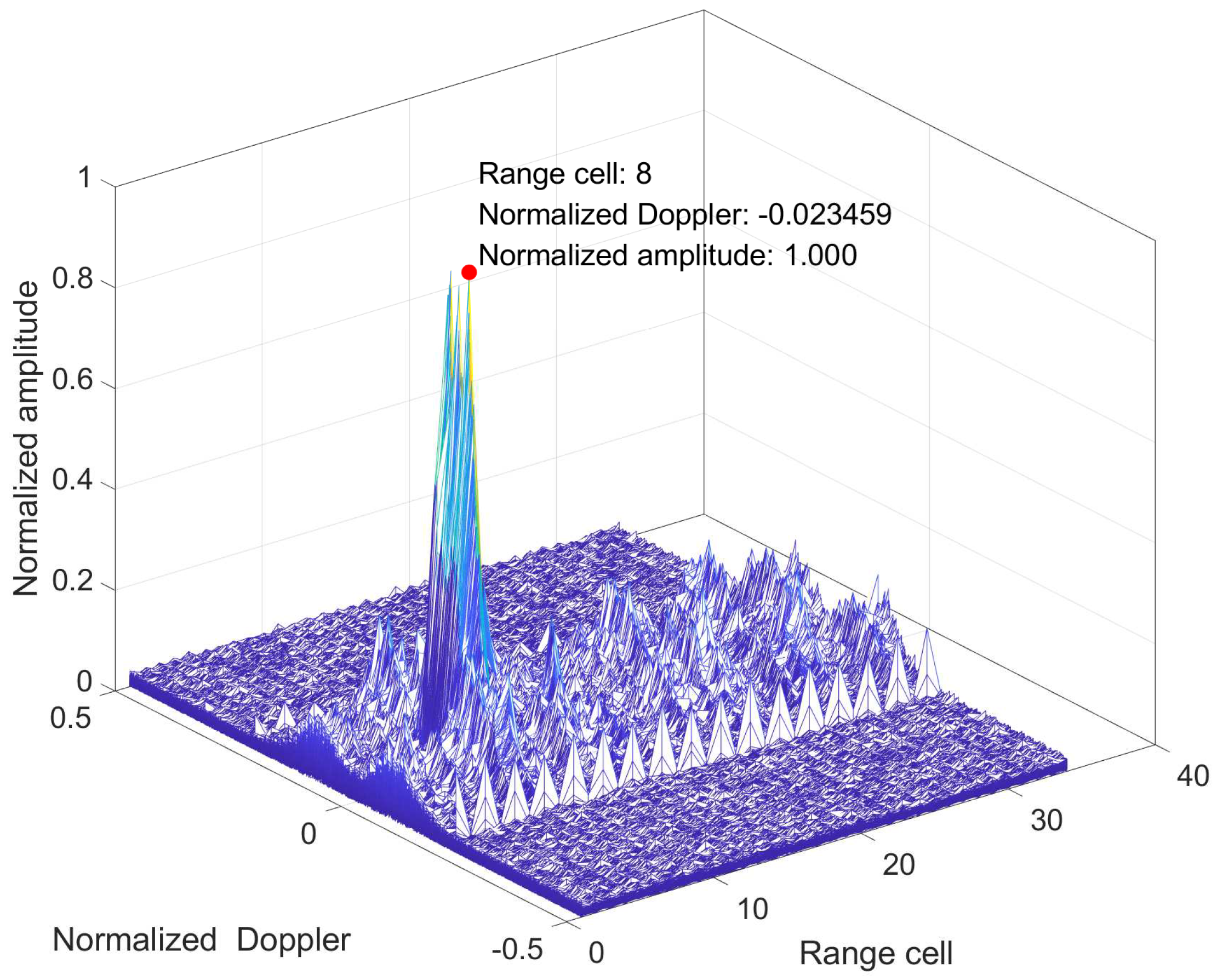
4.3. IPIX Radar Sensor System Data
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Ward, J. Space–Time Adaptive Processing for Airborne Radar; Technical Report; MIT Press: Cambridge, MA, USA, 1994. [Google Scholar]
- Kelly, E.J. An Adaptive Detection Algorithm. IEEE Trans. Aerosp. Electron. Syst. 1986, AES-22, 115–127. [Google Scholar] [CrossRef]
- Liu, W.; Xie, W.; Liu, J.; Wang, Y. Adaptive Double Subspace Signal Detection in Gaussian Background Part I: Homogeneous Environments. IEEE Trans. Signal Process. 2014, 62, 2345–2357. [Google Scholar] [CrossRef]
- Liu, W.; Xie, W.; Liu, J.; Wang, Y. Adaptive Double Subspace Signal Detection in Gaussian Background Part II: Partially Homogeneous Environments. IEEE Trans. Signal Process. 2014, 62, 2358–2369. [Google Scholar] [CrossRef]
- Shang, Z.; Du, Q.; Tang, Z.; Zhang, T.; Liu, W. Multichannel adaptive signal detection in structural nonhomogeneous environment characterized by the generalized eigenrelation. Signal Process. 2018, 148, 214–222. [Google Scholar] [CrossRef]
- Liu, J.; Zhou, S.; Liu, W.; Zheng, J.; Liu, H.; Li, J. Tunable Adaptive Detection in Colocated MIMO Radar. IEEE Trans. Signal Process. 2018, 66, 1080–1092. [Google Scholar] [CrossRef]
- Goodman, N.R. Statistical analysis based on a certain multivariate complex Gaussian distribution (an introduction). Ann. Math. Stat. 1963, 34, 152–177. [Google Scholar] [CrossRef]
- Gini, F.; Rangaswamy, M. Knowledge Based Radar Detection, Tracking and Classification (Adaptive and Learning Systems for Signal Processing, Communications and Control Series); Wiley: Hoboken, NJ, USA, 2008. [Google Scholar]
- Conte, E.; Lops, M.; Ricci, G. Adaptive matched filter detection in spherically invariant noise. IEEE Signal Process. Lett. 1996, 3, 248–250. [Google Scholar] [CrossRef]
- Pascal, F.; Chitour, Y.; Ovarlez, J.P.; Forster, P.; Larzabal, P. Covariance Structure Maximum-Likelihood Estimates in Compound Gaussian Noise: Existence and Algorithm Analysis. IEEE Trans. Signal Process. 2008, 56, 34–48. [Google Scholar] [CrossRef]
- Gini, F.; Greco, M. Covariance matrix estimation for CFAR Detection in correlated heavy tailed clutter. Signal Process. 2002, 82, 1847–1859. [Google Scholar] [CrossRef]
- Dai, B.; Wang, T.; Wu, J.; Bao, Z. Adaptively iterative weighting covariance matrix estimation for airborne radar clutter suppression. Signal Process. 2015, 106, 282–293. [Google Scholar] [CrossRef]
- Aubry, A.; Maio, A.D.; Pallotta, L.; Farina, A. Covariance matrix estimation via geometric barycenters and its application to radar training data selection. IET Radar Sonar Navig. 2013, 7, 600–614. [Google Scholar] [CrossRef]
- Cui, G.; Li, N.; Pallotta, L.; Foglia, G.; Kong, L. Geometric barycenters for covariance estimation in compound-Gaussian clutter. IET Radar Sonar Navig. 2017, 11, 404–409. [Google Scholar] [CrossRef]
- Hua, X.; Cheng, Y.; Wang, H.; Qin, Y.; Li, Y. Geometric means and medians with applications to target detection. IET Signal Process. 2017, 11, 711–720. [Google Scholar] [CrossRef]
- Brennan, L.E.; Reed, I.S. Theory of Adaptive Radar. IEEE Trans. Aerosp. Electron. Syst. 1973, AES-9, 237–252. [Google Scholar] [CrossRef]
- Guerci, J.R.; Baranoski, E.J. Knowledge-aided adaptive radar at DARPA: An overview. IEEE Signal Process. Mag. 2006, 23, 41–50. [Google Scholar] [CrossRef]
- Haykin, S. Cognitive radar: A way of the future. IEEE Signal Process. Mag. 2006, 23, 30–40. [Google Scholar] [CrossRef]
- Conte, E.; Maio, A.D.; Farina, A.; Foglia, G. Design and analysis of a knowledge-aided radar detector for doppler processing. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 1058–1079. [Google Scholar] [CrossRef]
- Foglia, G.; Hao, C.; Giunta, G.; Orlando, D. Knowledge-aided adaptive detection in partially homogeneous clutter: Joint exploitation of persymmetry and symmetric spectrum. Digit. Signal Process. 2017, 67, 131–138. [Google Scholar] [CrossRef]
- Foglia, G.; Hao, C.; Farina, A.; Giunta, G.; Orlando, D.; Hou, C. Adaptive Detection in Partially Homogeneous Clutter with Symmetric Spectrum. IEEE Trans. Aerosp. Electron. Syst. 2017, 54, 2110–2119. [Google Scholar] [CrossRef]
- Pailloux, G.; Forster, P.; Ovarlez, J.P.; Pascal, F. Persymmetric Adaptive Radar Detectors. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2376–2390. [Google Scholar] [CrossRef]
- Stoica, P.; Li, J.; Zhu, X.; Guerci, J.R. On Using a priori Knowledge in space–Time Adaptive Processing. IEEE Trans. Signal Process. 2008, 56, 2598–2602. [Google Scholar] [CrossRef]
- Zhu, X.; Li, J.; Stoica, P. Knowledge-Aided space–Time Adaptive Processing. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1325–1336. [Google Scholar] [CrossRef]
- Maio, A.D.; Foglia, G.; Farina, A.; Piezzo, M. Estimation of the covariance matrix based on multiple a-priori models. In Proceedings of the IEEE Radar Conference, Arlington, VA, USA, 10–14 May 2010; pp. 1025–1029. [Google Scholar]
- Wu, Y.; Tang, J.; Peng, Y. On the Essence of Knowledge-Aided Clutter Covariance Estimate and Its Convergence. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 569–585. [Google Scholar] [CrossRef]
- Hao, C.; Orlando, D.; Foglia, G.; Giunta, G. Knowledge-Based Adaptive Detection: Joint Exploitation of Clutter and System Symmetry Properties. IEEE Signal Process. Lett. 2016, 23, 1489–1493. [Google Scholar] [CrossRef]
- Cai, L.; Wang, H. A persymmetric multiband GLR algorithm. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 806–816. [Google Scholar] [CrossRef]
- Chen, Y.; Wiesel, A.; Eldar, Y.C.; Hero, A.O. Shrinkage Algorithms for MMSE Covariance Estimation. IEEE Trans. Signal Process. 2010, 58, 5016–5029. [Google Scholar] [CrossRef]
- Pascal, F.; Chitour, Y.; Quek, Y. Generalized Robust Shrinkage Estimator and Its Application to STAP Detection Problem. IEEE Trans. Signal Process. 2014, 62, 5640–5651. [Google Scholar] [CrossRef]
- Riedl, M.; Potter, L.C. Multimodel Shrinkage for Knowledge-Aided space–Time Adaptive Processing. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2601–2610. [Google Scholar] [CrossRef]
- Besson, O.; Tourneret, J.Y.; Bidon, S. Knowledge-Aided Bayesian Detection in Heterogeneous Environments. IEEE Signal Process. Lett. 2007, 14, 355–358. [Google Scholar] [CrossRef]
- Bidon, S.; Besson, O.; Tourneret, J.Y. A Bayesian Approach to Adaptive Detection in Nonhomogeneous Environments. IEEE Trans. Signal Process. 2008, 56, 205–217. [Google Scholar] [CrossRef]
- Bandiera, F.; Besson, O.; Ricci, G. Knowledge-aided covariance matrix estimation and adaptive detection in compound-Gaussian noise. IEEE Trans. Signal Process. 2010, 58, 5391–5396. [Google Scholar] [CrossRef]
- Gurram, P.R.; Goodman, N.A. Spectral-domain covariance estimation with a priori knowledge. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 1010–1020. [Google Scholar] [CrossRef]
- Techau, P.M.; Guerci, J.R.; Slocumb, T.H.; Griffiths, L.J. Performance bounds for hot and cold clutter mitigation. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 1253–1265. [Google Scholar] [CrossRef]
- Capraro, C.T.; Capraro, G.T.; Maio, A.D.; Farina, A.; Wicks, M. Demonstration of knowledge-aided space–time adaptive processing using measured airborne data. IEE Proc. Radar Sonar Navig. 2007, 153, 487–494. [Google Scholar] [CrossRef]
- De Maio, A.; Foglia, G.; Conte, E.; Farina, A. CFAR behavior of adaptive detectors: An experimental analysis. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 233–251. [Google Scholar] [CrossRef]
- Bidon, S.; Besson, O.; Tourneret, J.Y. Knowledge-Aided STAP in Heterogeneous Clutter using a Hierarchical Bayesian Algorithm. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1863–1879. [Google Scholar] [CrossRef]
- Fortunati, S.; Gini, F.; Greco, M.S. The Misspecified Cramer-Rao Bound and Its Application to Scatter Matrix Estimation in Complex Elliptically Symmetric Distributions. IEEE Trans. Signal Process. 2016, 64, 2387–2399. [Google Scholar] [CrossRef]
- Fortunati, S.; Gini, F.; Greco, M.S.; Richmond, C.D. Performance Bounds for Parameter Estimation under Misspecified Models: Fundamental Findings and Applications. IEEE Signal Process. Mag. 2017, 34, 142–157. [Google Scholar] [CrossRef]
- Fortunati, S.; Gini, F.; Greco, M.S. The Constrained Misspecified Cramér-Rao Bound. IEEE Signal Process. Lett. 2016, 23, 718–721. [Google Scholar] [CrossRef]
- Maio, A.D.; Farina, A.; Foglia, G. Knowledge-Aided Bayesian Radar Detectors and Their Application to Live Data. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 170–183. [Google Scholar] [CrossRef]
- Wang, P.; Li, H.; Besson, O.; Fang, J. Knowledge-aided hyperparameter-free Bayesian detection in stochastic homogeneous environments. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Shanghai, China, 20–25 March 2016; pp. 2901–2905. [Google Scholar]
- Gao, Y.; Li, H.; Himed, B. Knowledge-Aided Range-Spread Target Detection for Distributed MIMO Radar in Non-Homogeneous Environments. IEEE Trans. Signal Process. 2017, 65, 617–627. [Google Scholar] [CrossRef]
- Sangston, K.J.; Gini, F.; Greco, M.V.; Farina, A. Structures for radar detection in compound Gaussian clutter. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 445–458. [Google Scholar] [CrossRef]
- Sangston, K.J.; Gini, F.; Greco, M.S. Coherent Radar Target Detection in Heavy-Tailed Compound-Gaussian Clutter. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 64–77. [Google Scholar] [CrossRef]
- Pennec, X. Intrinsic Statistics on Riemannian Manifolds: Basic Tools for Geometric Measurements. J. Math. Imaging Vis. 2006, 25, 127–154. [Google Scholar] [CrossRef]
- Nitzberg, R. Application of Maximum Likelihood Estimation of Persymmetric Covariance Matrices to Adaptive Processing. IEEE Trans. Aerosp. Electron. Syst. 1980, AES-16, 124–127. [Google Scholar] [CrossRef]
- Fuhrmann, D.R. Application of Toeplitz covariance estimation to adaptive beamforming and detection. IEEE Trans. Signal Process. 1991, 39, 2194–2198. [Google Scholar] [CrossRef]
- Kraut, S.; Scharf, L.L. The CFAR adaptive subspace detector is a scale-invariant GLRT. IEEE Trans. Signal Process. Publ. IEEE Signal Process. Soc. 1999, 47, 2538–2541. [Google Scholar] [CrossRef]
- Gini, F.; Greco, M.V. Suboptimum approach to adaptive coherent radar detection in compound-Gaussian clutter. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 1095–1104. [Google Scholar] [CrossRef]
- Balleri, A.; Nehorai, A.; Wang, J. Maximum likelihood estimation for compound-gaussian clutter with inverse gamma texture. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 775–779. [Google Scholar] [CrossRef]
- Farina, A.; Gini, F.; Greco, M.V.; Verrazzani, L. High resolution sea clutter data: Statistical analysis of recorded live data. IEEE Proc. Radar Sonar Navig. 1997, 144, 121–130. [Google Scholar] [CrossRef]
- Gini, F.; Greco, M.V.; Diani, M.; Verrazzani, L. Performance analysis of two adaptive radar detectors against non-Gaussian real sea clutter data. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 1429–1439. [Google Scholar]
- Conte, E.; De Maio, A.; Galdi, C. Statistical analysis of real clutter at different range resolutions. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 903–918. [Google Scholar] [CrossRef]
- Wang, P.; Sahinoglu, Z.; Pun, M.O.; Li, H.; Himed, B. Knowledge-Aided Adaptive Coherence Estimator in Stochastic Partially Homogeneous Environments. IEEE Signal Process. Lett. 2011, 18, 193–196. [Google Scholar] [CrossRef]
- Carotenuto, V.; Maio, A.D.; Orlando, D.; Stoica, P. Model Order Selection Rules for Covariance Structure Classification in Radar. IEEE Trans. Signal Process. 2017, 65, 5305–5317. [Google Scholar] [CrossRef]
- Carotenuto, V.; Maio, A.D.; Orlando, D.; Stoica, P. Radar Detection Architecture based on Interference Covariance Structure Classification. IEEE Trans. Aerosp. Electron. Syst. 2018. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Estimator | |
|---|---|
| 19980223_170435_ANTSTEP.CDF | |
|---|---|
| Date and time (UTC) | 1998/02/23 17:04:35 |
| RF frequency | 9.39 GHz |
| Pulse length | 100 ns |
| Pulse repetition frequency | 1000 Hz |
| Radar azimuth angle | |
| Range | 3500–4000 m |
| Range resolution | 15 m |
| Radar beamwidth | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, N.; Shang, Z.; Du, Q. Knowledge-Aided Structured Covariance Matrix Estimator Applied for Radar Sensor Signal Detection. Sensors 2019, 19, 664. https://doi.org/10.3390/s19030664
Kang N, Shang Z, Du Q. Knowledge-Aided Structured Covariance Matrix Estimator Applied for Radar Sensor Signal Detection. Sensors. 2019; 19(3):664. https://doi.org/10.3390/s19030664
Chicago/Turabian StyleKang, Naixin, Zheran Shang, and Qinglei Du. 2019. "Knowledge-Aided Structured Covariance Matrix Estimator Applied for Radar Sensor Signal Detection" Sensors 19, no. 3: 664. https://doi.org/10.3390/s19030664
APA StyleKang, N., Shang, Z., & Du, Q. (2019). Knowledge-Aided Structured Covariance Matrix Estimator Applied for Radar Sensor Signal Detection. Sensors, 19(3), 664. https://doi.org/10.3390/s19030664