Gesture Prediction Using Wearable Sensing Systems with Neural Networks for Temporal Data Analysis

Abstract
:1. Introduction
2. Gesture Prediction Models for Temporal Data Analysis
3. Experimental Method
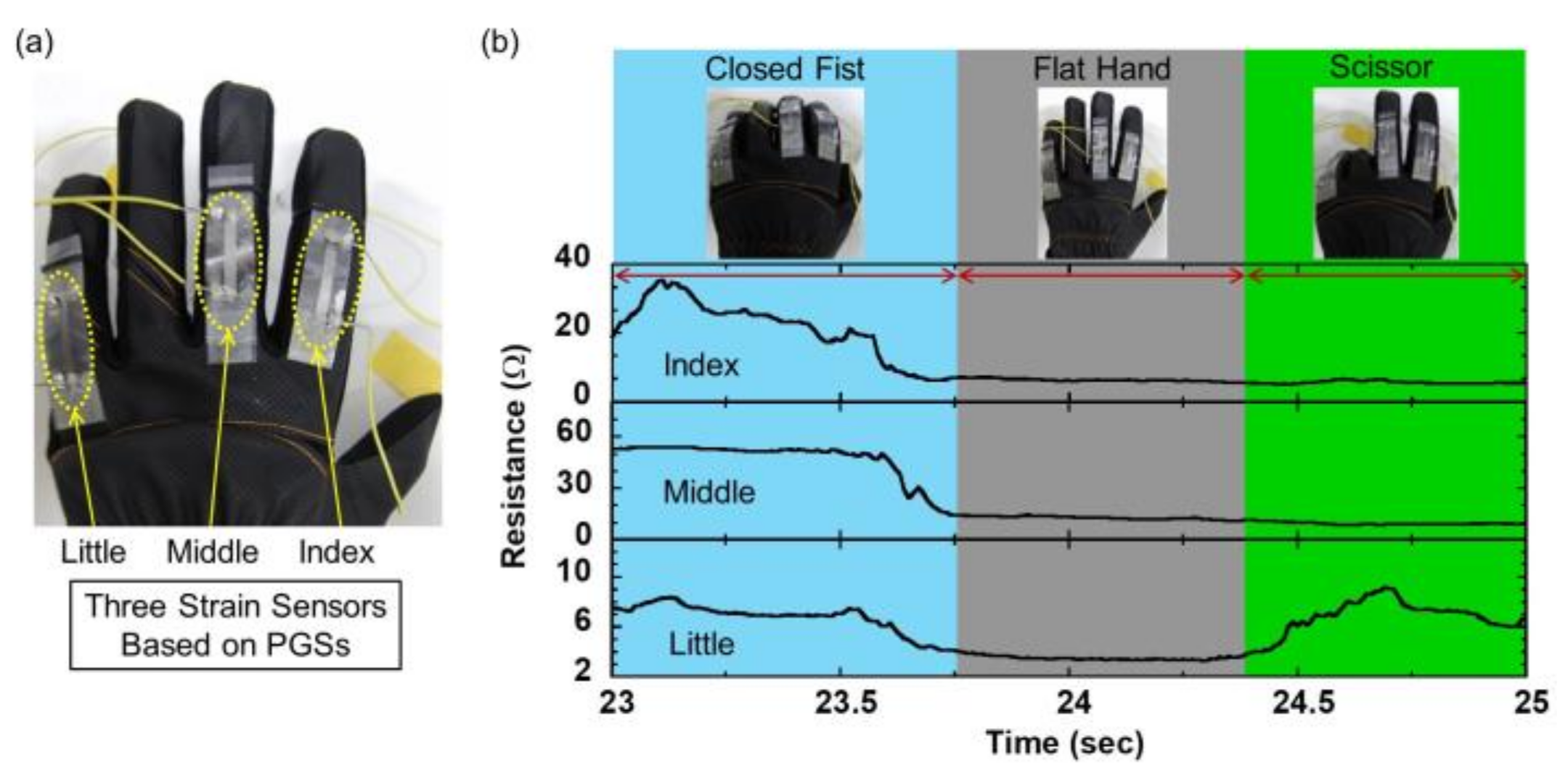
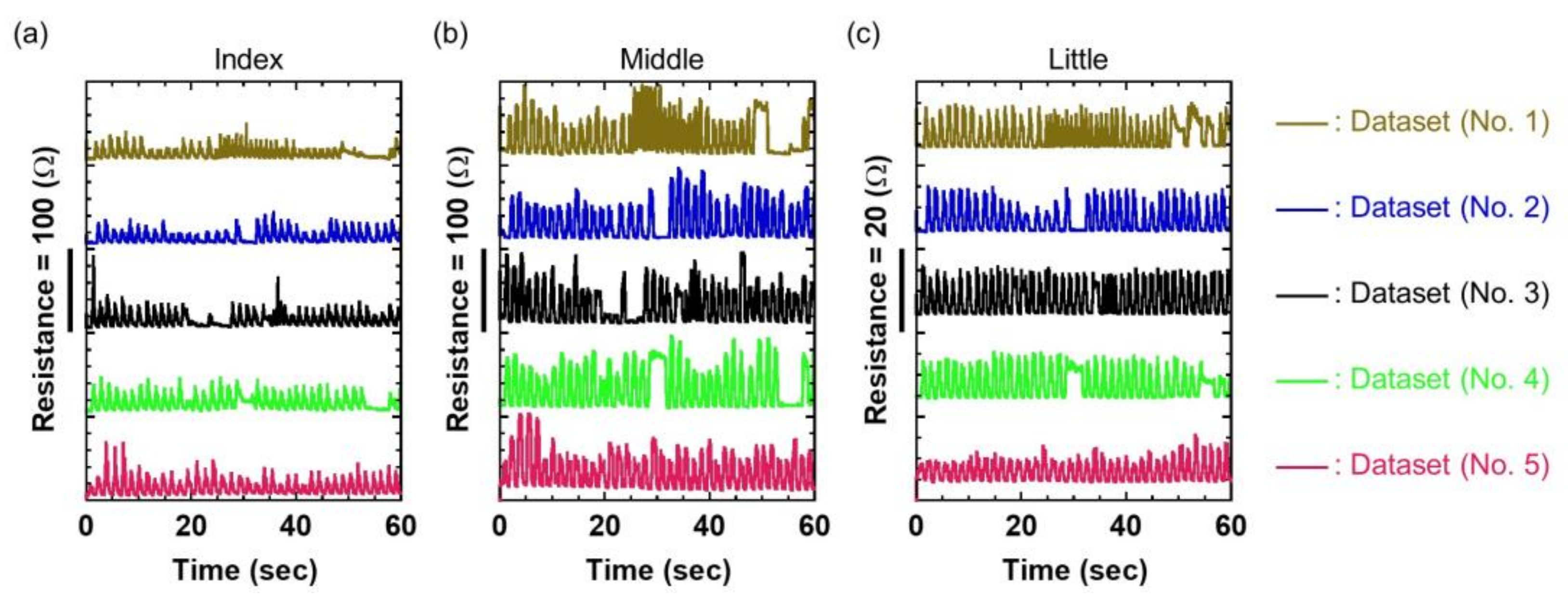
3.1. Fabrication of Data Gloves Using Thin Graphite Film-Based Strain Sensors
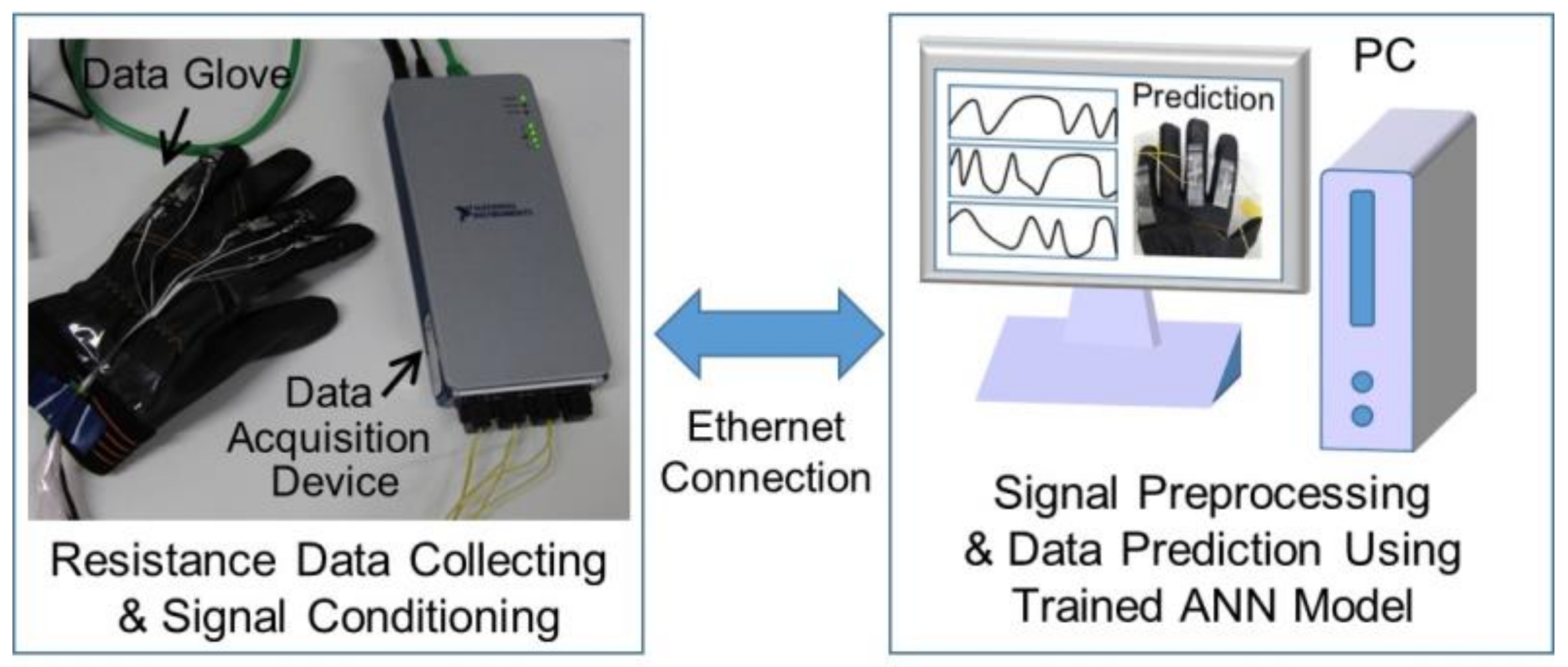
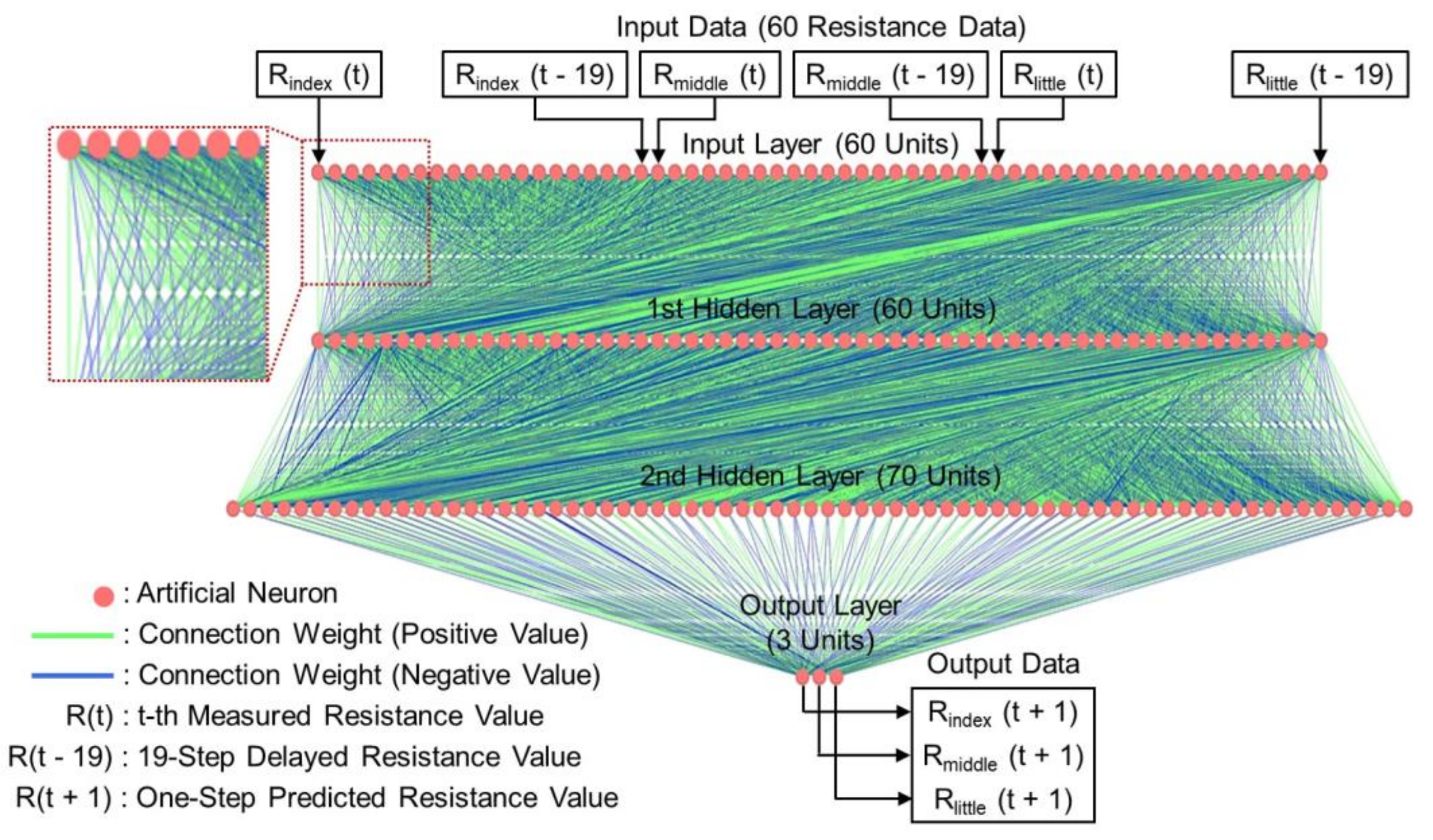
3.2. Procedure for Gesture Prediction System Using TDNN Model
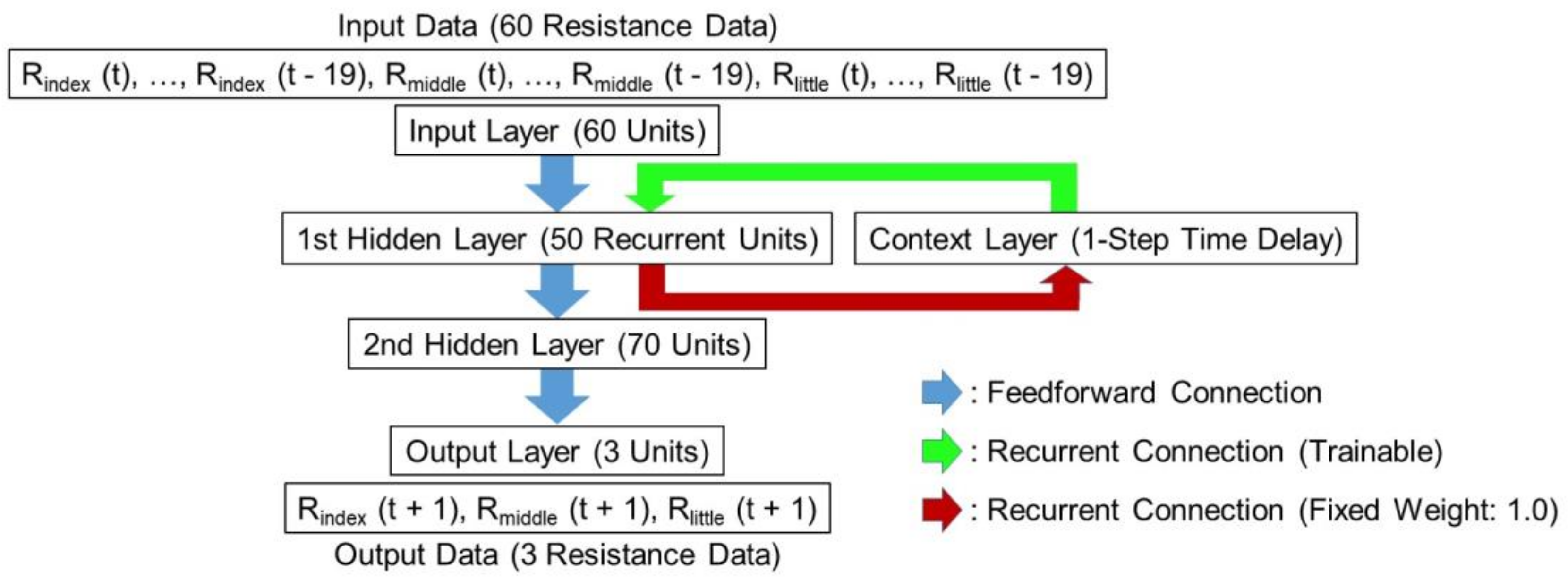
3.3. Architecture of Other Algorithms for Temporal Analysis
4. Results and Discussion
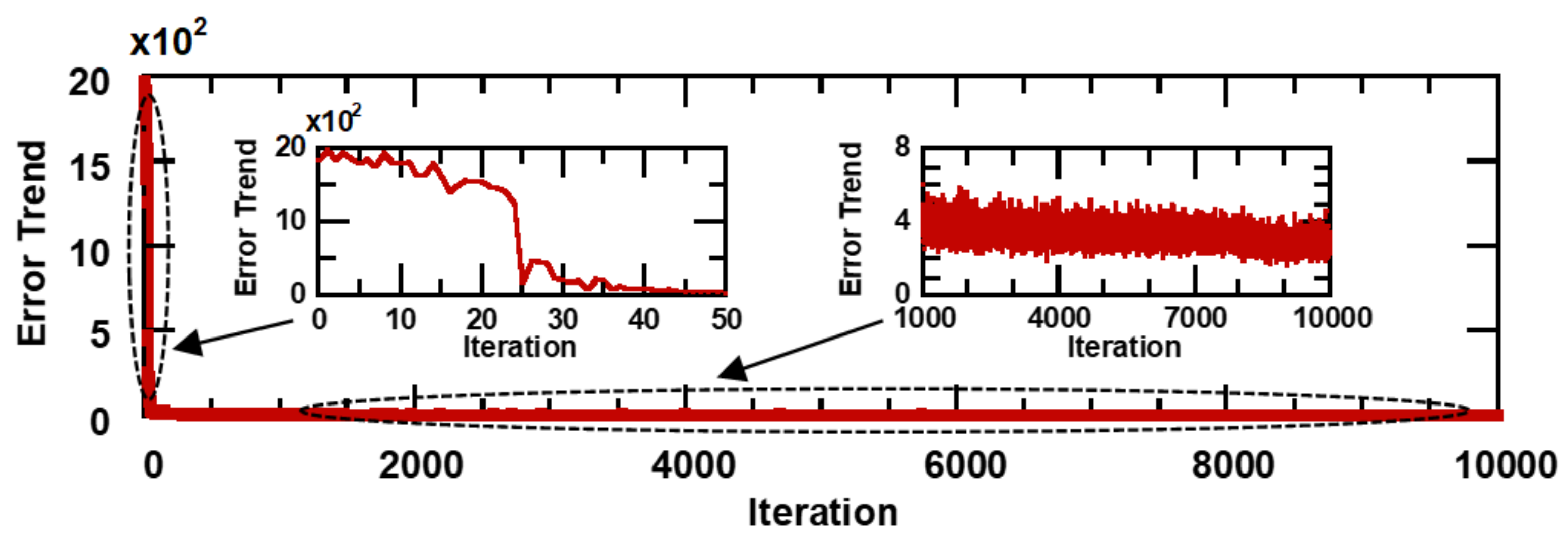
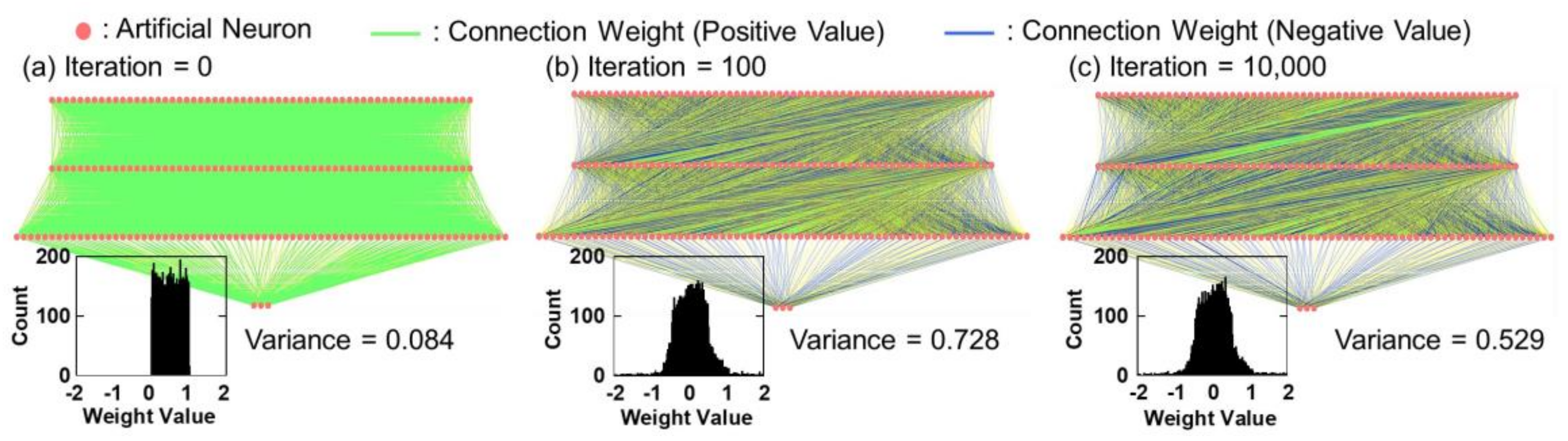
4.1. Network Training for Hand Gesture Prediction
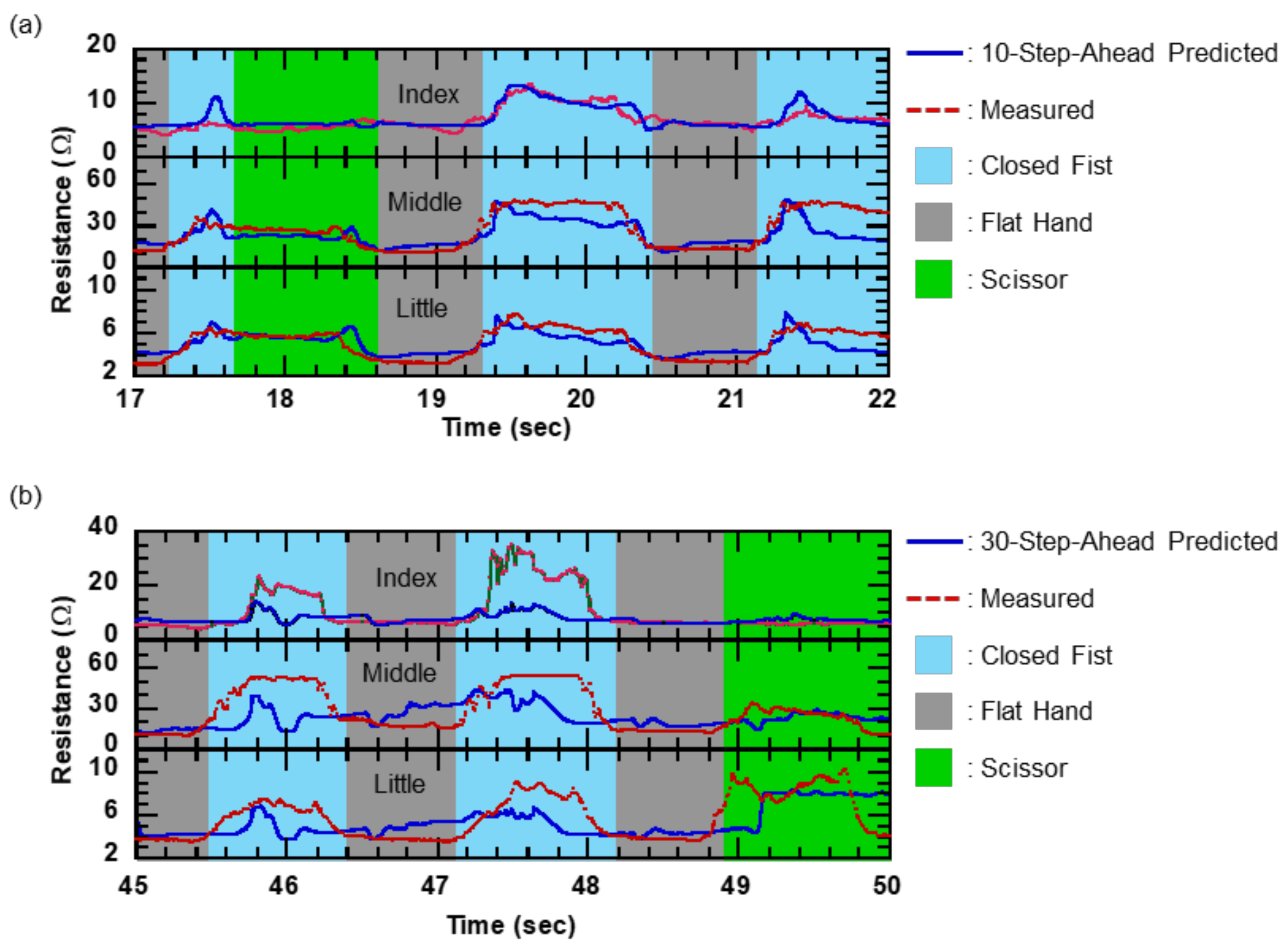
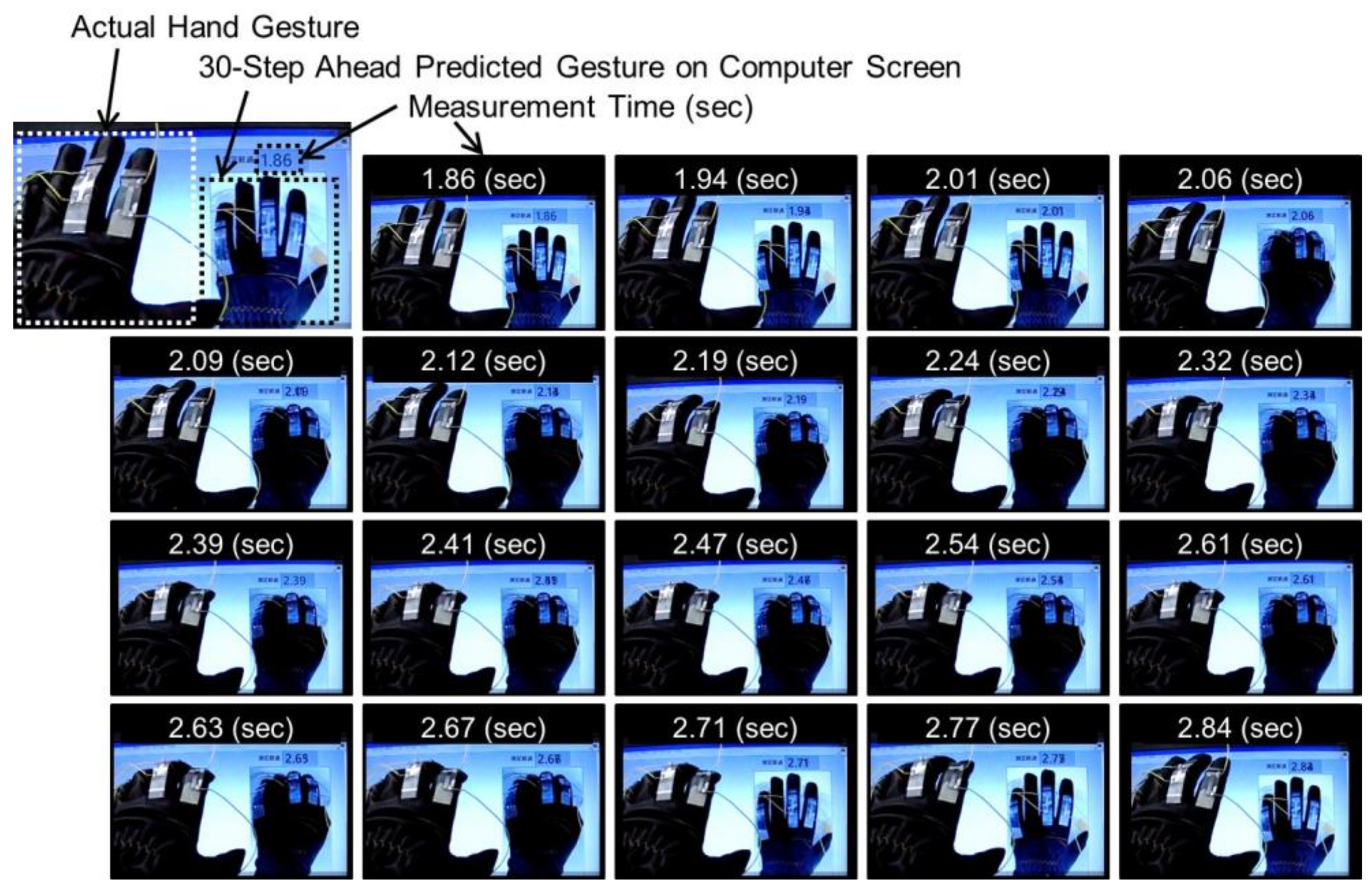
4.2. Gesture Prediction Using TDNNs in Real Time
4.3. Comparison of TDNN Model with Other Algorithms for Temporal Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Stiefmeier, T.; Troster, D.; Troster, G.; Ogris, G.; Lukowicz, P. Wearable activity tracking in car manufacturing. IEEE Perv. Comput. Mag. 2008, 7, 42–50. [Google Scholar] [CrossRef]
- Hao, Y.; Helo, P. The role of wearable devices in meeting the needs of cloud manufacturing: A case study. Robot. Comput. Integr. Manuf. 2017, 45, 168–179. [Google Scholar] [CrossRef]
- Rashidi, P.; Cook, D.J. The resident in the loop: Adapting the smart home to the user. IEEE Trans. Syst. Man. Cybern. J. Part A 2009, 39, 949–959. [Google Scholar] [CrossRef]
- Tak, Y.S.; Kim, J.; Hwang, E. Hierarchical querying scheme of human motions for smart home environment. Eng. Appl. Artif. Intell. 2012, 25, 1301–1312. [Google Scholar] [CrossRef]
- Kranz, M.; Moller, A.; Hammerla, N.; Diewald, S.; Plotz, T.; Olivier, P.; Roalter, L. The mobile fitness coach: Towards individualized skill assessment using personalized mobile devices. Perv. Mob. Comput. 2013, 9, 203–215. [Google Scholar] [CrossRef] [Green Version]
- Liu, G.; Huang, B.; Wang, L. A wearable respiratory biofeedback system based on generalized body sensor network. Telemed. e-Health 2011, 17, 348–357. [Google Scholar] [CrossRef] [PubMed]
- Hoai, M.; De la Torre, F. Max-margin early event detectors. Int. J. Comput. Vis. 2014, 107, 191–202. [Google Scholar] [CrossRef]
- Ma, S.; Sigal, L.; Sclaroff, S. Learning activity progression in lstms for activity detection and early detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 1942–1950. [Google Scholar]
- Rautaray, S.; Agrawal, A. Vision based hand gesture recognition for human computer interaction: A survey. Artif. Intell. Rev. 2015, 43, 1–54. [Google Scholar] [CrossRef]
- Amjadi, M.; Kyung, K.; Park, I.; Sitti, M. Stretchable, Skin-Mountable, and Wearable Strain Sensors and Their Potential Applications: A Review. Adv. Funct. Mater. 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- Ordóñez, F.J.; Roggen, D. Deep Convolutional and LSTM Recurrent Neural Networks for Multimodal Wearable Activity Recognition. Sensors 2016, 16, 115. [Google Scholar] [CrossRef]
- Barbounis, T.G.; Theocharis, J.B.; Alexiadis, M.C.; Dokopoulos, P.S. Long-term wind speed and power forecasting using local recurrent neural network models. IEEE Trans. Energy Convers. 2006, 21, 273–284. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G.E. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Paliwal, M.; Kumar, U.A. Neural networks and statistical techniques: A review of applications. Expert. Syst. Appl. 2009, 36, 2–17. [Google Scholar] [CrossRef]
- Maier, H.R.; Dandy, G.C. The use of artificial neural networks for the prediction of water quality parameters. Water Resour. Res. 1996, 32, 1013–1022. [Google Scholar] [CrossRef]
- Waibel, A.H.; Hanazawa, T.; Hinton, G.E.; Shikano, K.; Lang, K.J. Phoneme recognition using time-delay neural networks. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 328–339. [Google Scholar] [CrossRef]
- Ji, W.; Chee, K.C. Prediction of hourly solar radiation using a novel hybrid model of ARMA and TDNN. Solar Energy 2011, 85, 808–817. [Google Scholar] [CrossRef]
- Elman, J.L. Finding structure in time. Cognit. Sci. 1990, 14, 179–211. [Google Scholar] [CrossRef]
- Che, Z.; Purushotham, S.; Cho, K.; Sontag, D.; Liu, Y. Recurrent neural networks for multivariate time series with missing values. Sci. Rep. 2018, 8, 6085. [Google Scholar] [CrossRef]
- “PGS” Graphite Sheets. Panasonic. Available online: https://industrial.panasonic.com/cdbs/www-data/pdf/AYA0000/AYA0000C28.pdf (accessed on 10 December 2018).
- Saito, T.; Shimoda, H.; Shirakashi, J. Investigation of strain sensors based on thin graphite wires. J. Vac. Sci. Technol. 2015, 33, 042002. [Google Scholar] [CrossRef]
- Sak, H.; Senior, A.; Beaufays, F. Long short-term memory recurrent neural network architectures for large scale acoustic modeling. In Proceedings of the 15th Annual Conference of the International Speech Communication Association. Singapore, Singapore, 14–18 September 2014; pp. 338–342. [Google Scholar]
- Preacher, K.J.; Curran, P.J.; Bauer, D.J. Computational tools for probing interactions in multiple linear regression, multilevel modeling, and latent curve analysis. J. Educ. Behav. Stat. 2006, 31, 437–448. [Google Scholar] [CrossRef]
- Sousa, S.; Martins, F.; Alvim-Ferraz, M.; Pereira, M. Multiple linear regression and artificial neural networks based on principle components to predict ozone concentrations. Environ. Model. Softw. 2007, 22, 97–103. [Google Scholar] [CrossRef]
- Salchow-Hömmen, C.; Callies, L.; Laidig, D.; Valtin, M.; Schauer, T.; Seel, T.A. Tangible Solution for Hand Motion Tracking in Clinical Applications. Sensors 2019, 19, 208. [Google Scholar] [CrossRef] [PubMed]
- Ciotti, S.; Battaglia, E.; Carbonaro, N.; Bicchi, A.; Tognetti, A.; Bianchi, M. A Synergy-Based Optimally Designed Sensing Glove for Functional Grasp Recognition. Sensors 2016, 16, 811. [Google Scholar] [CrossRef]
- Ahn, H.S.; Sa, I.K.; Lee, D.W.; Choi, D.A. Playmate Robot System for Playing the Rock-Paper-Scissors Game with Humans. Artif. Life Rob. 2011, 16, 142–146. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning representations by back-propagating errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Adeyemi, O.; Grove, I.; Peets, S.; Domun, Y.; Norton, T. Dynamic Neural Network Modelling of Soil Moisture Content for Predictive Irrigation Scheduling. Sensors 2018, 18, 3408. [Google Scholar] [CrossRef] [PubMed]
- Srebro, N.; Rennie, J.D.; Jaakkola, T. Maximum-margin matrix factorization. Adv. Neural Inf. Process. Syst. 2005, 17, 1329–1336. [Google Scholar]
- Zhang, X. Time series analysis and prediction by neural networks. Optim. Methods Softw. 1994, 4, 151–170. [Google Scholar] [CrossRef]
- Drucker, H.; Le Cun, Y. Improving generalization performance using double backpropagation. IEEE Trans. Neural Netw. 1992, 3, 991–997. [Google Scholar] [CrossRef]
- Hyndman, R.J.; Koehler, A.B. Another look at measures of forecast accuracy. Int. J. Forecast. 2006, 22, 679–688. [Google Scholar] [CrossRef] [Green Version]
- Kwolek, B.; Kepski, M. Improving fall detection by the use of depth sensor and accelerometer. Neurocomputing 2015, 168, 637–645. [Google Scholar] [CrossRef]
- Bengio, Y.; Grandvalet, Y. No unbiased estimator of the variance of k-fold cross-validation. J. Mach. Learn. Res. 2004, 5, 1089–1105. [Google Scholar]
- Geladi, P.; Kowalski, B.R. Partial least squares regression (PLS): A tutorial. Anal. Chim. Acta 1986, 185, 1–17. [Google Scholar] [CrossRef]
- Ertugrul, Ö.F. Forecasting electricity load by a novel recurrent extreme learning machines approach. Int. J. Electr. Power Energy Syst. 2016, 78, 429–435. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MAPE (%) | Classification Accuracy (%) | |||||||
|---|---|---|---|---|---|---|---|---|
| Prediction | Index | Middle | Little | Average | Index | Middle | Little | Average |
| 10-Step-Ahead | 17.2 | 29.8 | 16.0 | 21.0 | 89.7 | 88.4 | 75.8 | 84.6 |
| 30-Step-Ahead | 30.2 | 56.3 | 29.9 | 38.8 | 79.6 | 50.2 | 53.6 | 61.1 |
| MAPE (%) | Classification Accuracy (%) | |||||||
|---|---|---|---|---|---|---|---|---|
| Model | Index | Middle | Little | Average | Index | Middle | Little | Average |
| TDNN | 21.2 | 26.2 | 12.7 | 20.0 | 89.6 | 90.0 | 91.6 | 90.4 |
| RNN | 19.3 | 29.8 | 10.6 | 19.9 | 90.6 | 89.6 | 92.3 | 90.8 |
| MLR | 14.0 | 37.5 | 34.9 | 28.8 | 89.8 | 75.8 | 60.7 | 75.4 |
| MAPE (%) | Classification Accuracy (%) | |||||||
|---|---|---|---|---|---|---|---|---|
| Model | Index | Middle | Little | Average | Index | Middle | Little | Average |
| TDNN | 42.8 | 58.7 | 30.2 | 43.9 | 74.1 | 70.3 | 72.8 | 72.4 |
| RNN | 35.4 | 52.3 | 24.1 | 37.3 | 75.2 | 72.1 | 74.7 | 74.0 |
| MLR | 39.3 | 50.0 | 381.2 | 156.8 | 70.8 | 66.8 | 42.2 | 59.9 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kanokoda, T.; Kushitani, Y.; Shimada, M.; Shirakashi, J.-i. Gesture Prediction Using Wearable Sensing Systems with Neural Networks for Temporal Data Analysis. Sensors 2019, 19, 710. https://doi.org/10.3390/s19030710
Kanokoda T, Kushitani Y, Shimada M, Shirakashi J-i. Gesture Prediction Using Wearable Sensing Systems with Neural Networks for Temporal Data Analysis. Sensors. 2019; 19(3):710. https://doi.org/10.3390/s19030710
Chicago/Turabian StyleKanokoda, Takahiro, Yuki Kushitani, Moe Shimada, and Jun-ichi Shirakashi. 2019. "Gesture Prediction Using Wearable Sensing Systems with Neural Networks for Temporal Data Analysis" Sensors 19, no. 3: 710. https://doi.org/10.3390/s19030710
APA StyleKanokoda, T., Kushitani, Y., Shimada, M., & Shirakashi, J. -i. (2019). Gesture Prediction Using Wearable Sensing Systems with Neural Networks for Temporal Data Analysis. Sensors, 19(3), 710. https://doi.org/10.3390/s19030710