Optimal Shadowing Filter for a Positioning and Tracking Methodology with Limited Information


Abstract
:1. Introduction
2. Shadowing Filters
3. Summary of the Tracking Methodology
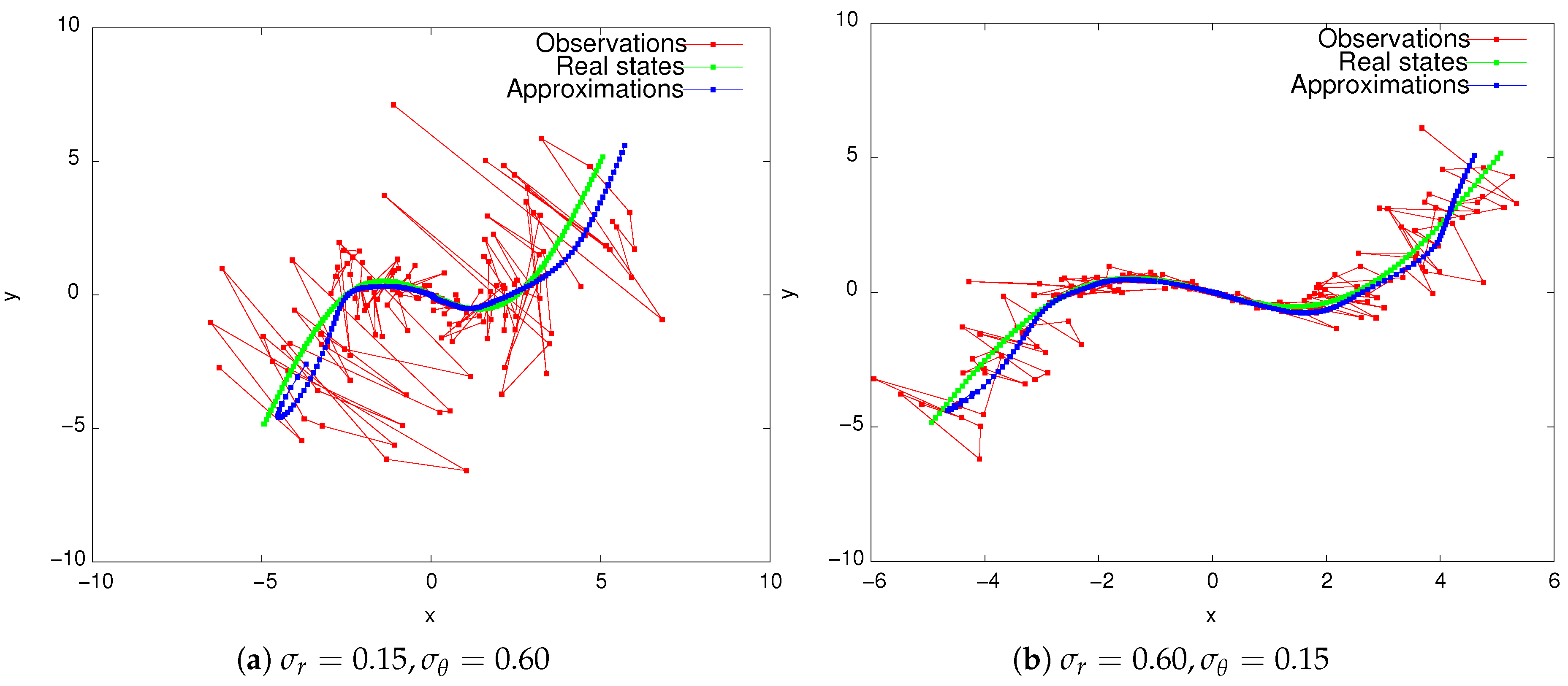
3.1. Solution of the Two-Dimensional Problem
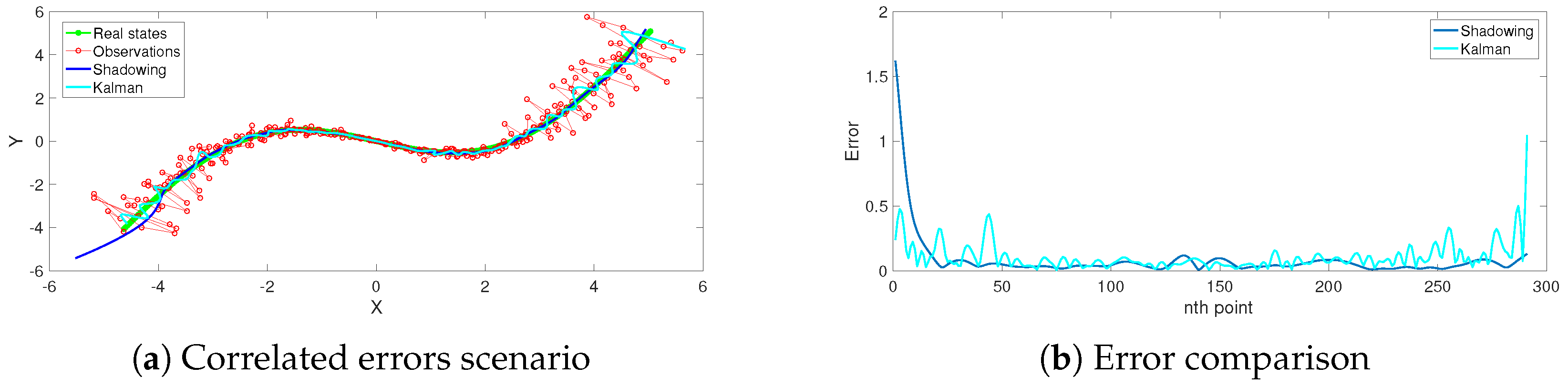
3.1.1. Correlated Observational Errors
3.1.2. Uncorrelated Observational Errors
4. Numerical Investigations: Correlated vs. Uncorrelated Observational Errors
4.1. Quality Measures
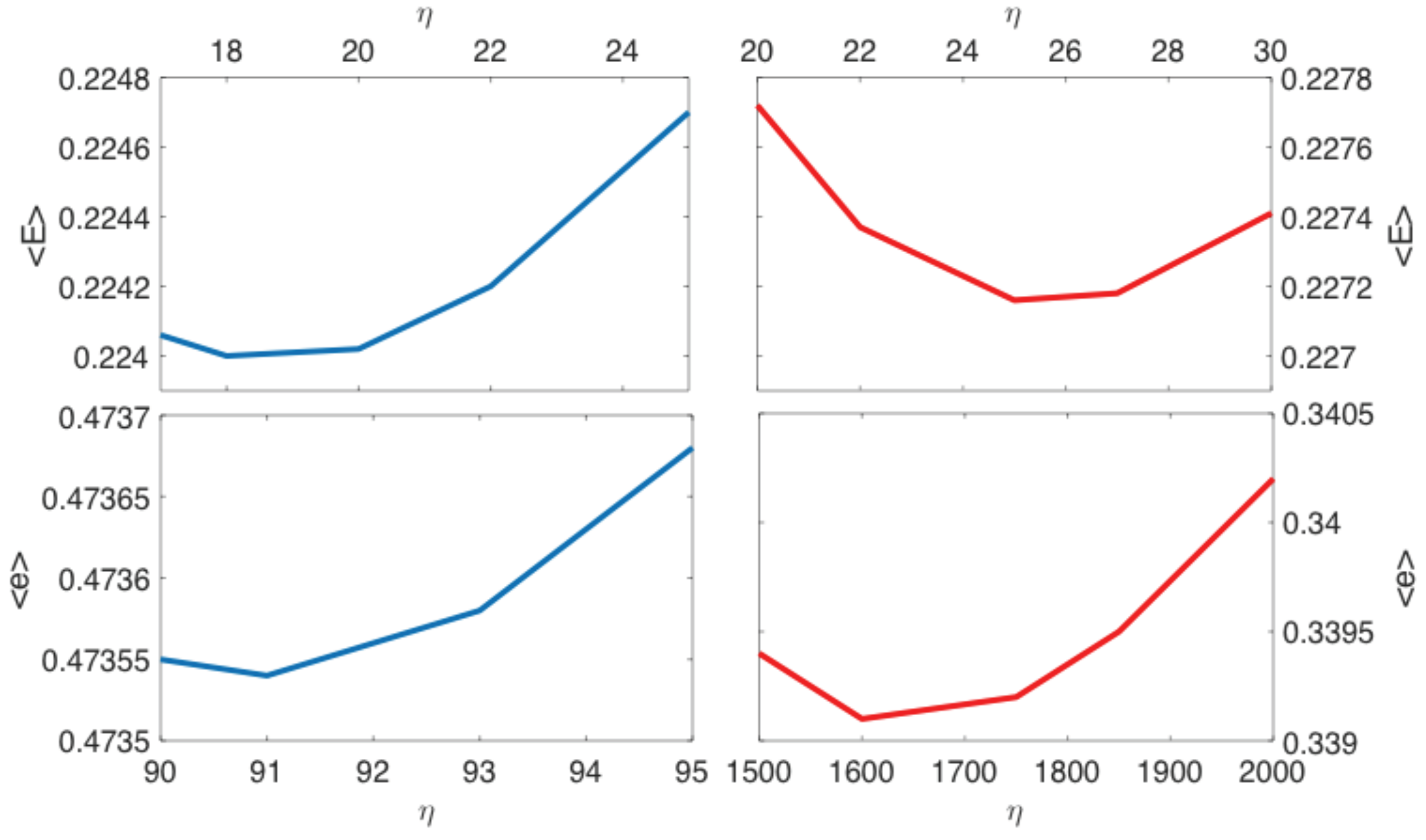
4.2. Optimization of the Filter Performance
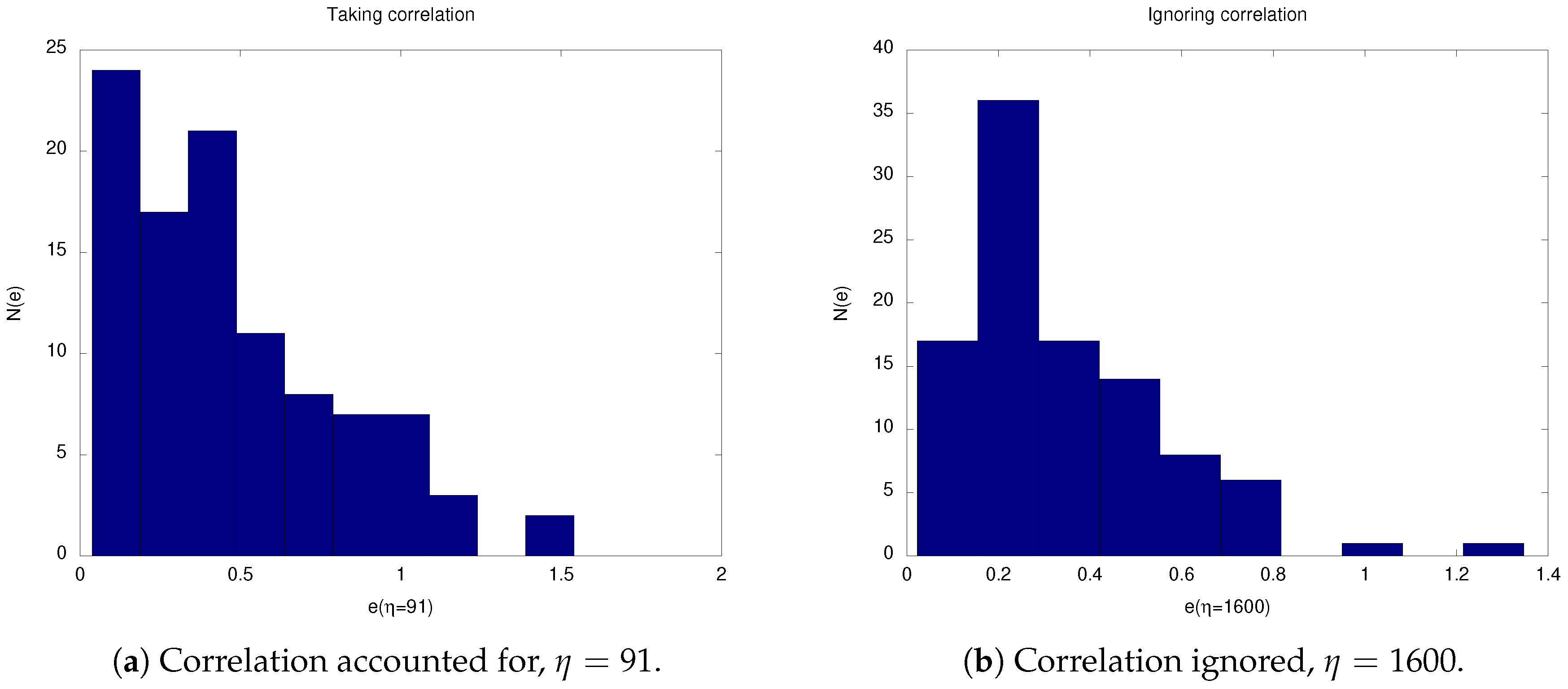
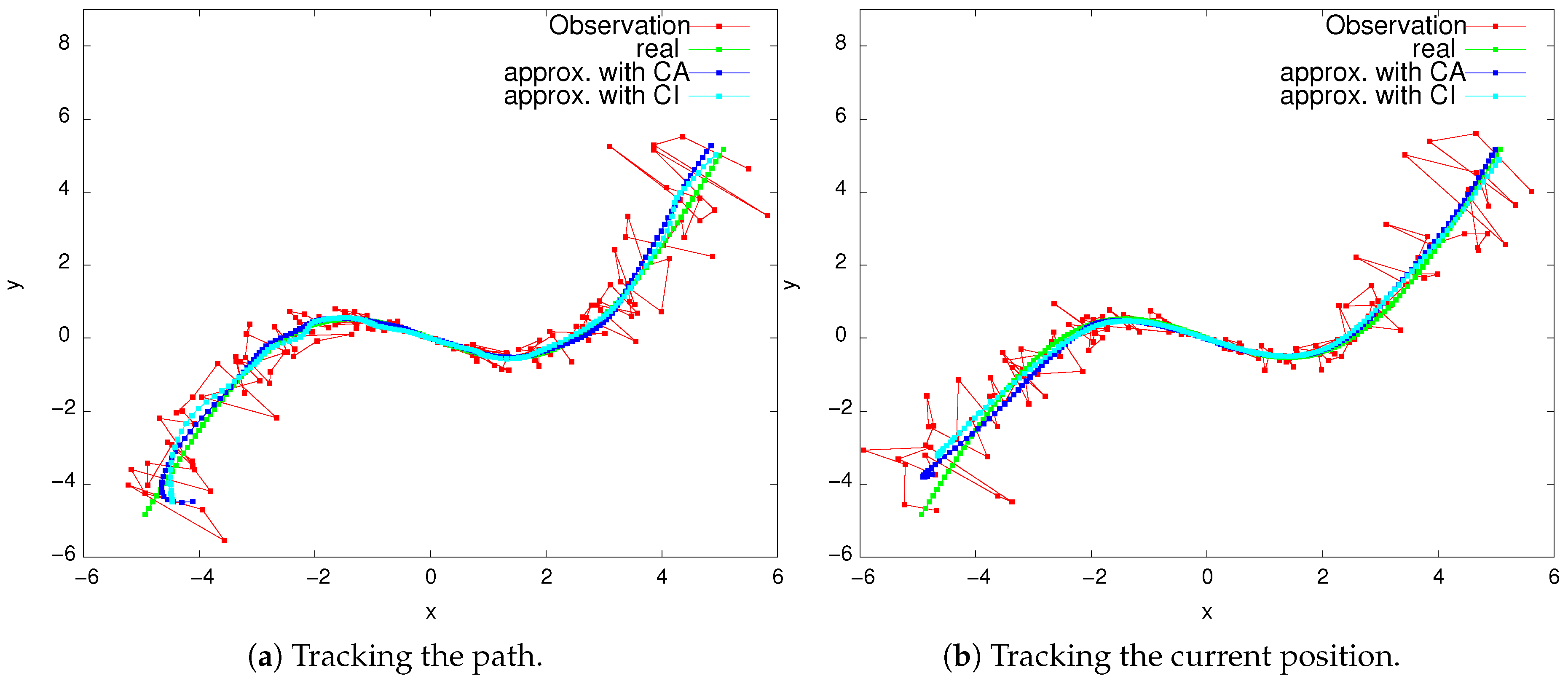
4.3. Comparison of the CA and CI Cases
- For the CA algorithm: the -distribution decayed monotonously, and all errors were contained within the interval ; and about 60% of the errors were between .
- For the CI algorithm: the errors were contained within the smaller interval , and the distribution was less broad; and in the subinterval from , we found 70% of the errors.
- In addition, there was a peak around the average value in both cases with .
5. Applications
5.1. Non-Uniform Sampling
5.2. Multiple Bearing Observations: Singularities
5.3. Chaotic Trajectory: Lorenz Model
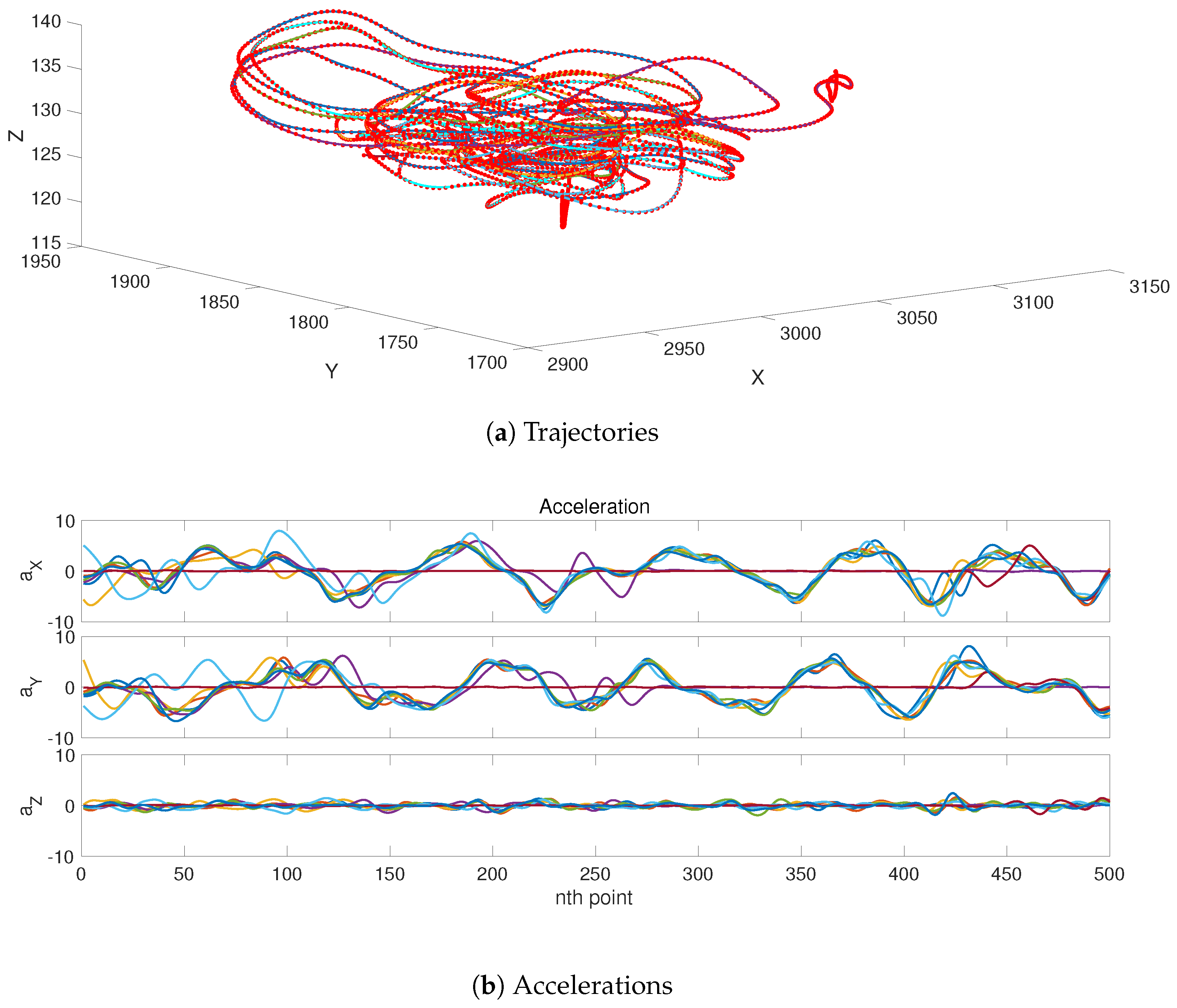
5.4. Real-World Multiple Object Application
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Code Availability
Abbreviations
| CA | Taking observational errors’ Correlation into Account |
| CI | Ignoring observational errors’ Correlation |
Appendix A. Detailed Solution
Appendix B. Numerical Investigation Tables

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment 1 | 0.1 | 1 | 10 | 100 | 1000 | |
| 0.34 | 0.28 | 0.24 | 0.26 | 0.46 | ||
| Experiment 2 | 1 | 5 | 10 | 50 | 100 | |
| 0.27 | 0.24 | 0.23 | 0.24 | 0.25 | ||
| Experiment 3 | 5 | 7 | 10 | 30 | 50 | |
| 0.235 | 0.230 | 0.227 | 0.228 | 0.237 | ||
| Experiment 4 | 7 | 10 | 15 | 20 | 30 | |
| 0.234 | 0.229 | 0.227 | 0.226 | 0.228 | ||
| Experiment 5 | 15 | 17 | 20 | 25 | 30 | |
| 0.2361 | 0.2358 | 0.2357 | 0.2364 | 0.2374 | ||
| Experiment 6 | 17 | 18 | 20 | 22 | 25 | |
| 0.22406 | 0.22400 | 0.22402 | 0.22420 | 0.22470 |
| Experiment 1 | 0.1 | 1 | 10 | 100 | 1000 | |
| 0.37 | 0.28 | 0.23 | 0.24 | 0.43 | ||
| Experiment 2 | 1 | 5 | 10 | 50 | 100 | |
| 0.291 | 0.246 | 0.233 | 0.231 | 0.249 | ||
| Experiment 3 | 10 | 30 | 50 | 70 | 100 | |
| 0.23 | 0.22 | 0.23 | 0.23 | 0.25 | ||
| Experiment 4 | 10 | 20 | 30 | 40 | 50 | |
| 0.2361 | 0.2299 | 0.2298 | 0.2317 | 0.2345 | ||
| Experiment 5 | 20 | 25 | 30 | 35 | 40 | |
| 0.227 | 0.226 | 0.227 | 0.228 | 0.229 | ||
| Experiment 6 | 20 | 22 | 25 | 27 | 30 | |
| 0.22772 | 0.22737 | 0.22716 | 0.22718 | 0.22741 |
| Experiment 1 | 0.1 | 1 | 10 | 100 | 1000 | |
| 0.86 | 0.77 | 0.59 | 0.47 | 0.91 | ||
| Experiment 2 | 10 | 100 | 200 | 500 | 1000 | |
| 0.55 | 0.47 | 0.51 | 0.70 | 0.95 | ||
| Experiment 3 | 10 | 75 | 100 | 150 | 200 | |
| 0.55 | 0.49 | 0.50 | 0.52 | 0.54 | ||
| Experiment 4 | 10 | 50 | 75 | 90 | 100 | |
| 0.5777 | 0.4976 | 0.4863 | 0.4861 | 0.4851 | ||
| Experiment 5 | 75 | 80 | 90 | 95 | 100 | |
| 0.4690 | 0.4678 | 0.4664 | 0.4664 | 0.4669 | ||
| Experiment 6 | 90 | 91 | 92 | 93 | 95 | |
| 0.47355 | 0.47354 | 0.47356 | 0.47358 | 0.47368 |
| Experiment 1 | 1 | 10 | 100 | 1000 | 10,000 | |
| 0.71 | 0.59 | 0.45 | 0.36 | 0.47 | ||
| Experiment 2 | 100 | 500 | 1000 | 5000 | 10,000 | |
| 0.40 | 0.36 | 0.35 | 0.40 | 0.50 | ||
| Experiment 3 | 500 | 750 | 1000 | 2500 | 5000 | |
| 0.349 | 0.336 | 0.329 | 0.327 | 0.365 | ||
| Experiment 4 | 1000 | 2000 | 2500 | 3500 | 5000 | |
| 0.364 | 0.353 | 0.356 | 0.367 | 0.392 | ||
| Experiment 5 | 1000 | 1500 | 2000 | 2250 | 2500 | |
| 0.354 | 0.344 | 0.340 | 0.341 | 0.341 | ||
| Experiment 6 | 1500 | 1750 | 2000 | 2100 | 2250 | |
| 0.36438 | 0.36315 | 0.36319 | 0.36348 | 0.36416 | ||
| Experiment 7 | 1500 | 1600 | 1750 | 1850 | 2000 | |
| 0.3394 | 0.3391 | 0.3392 | 0.3395 | 0.3402 |
References
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation; John Wiley and Sons: Hoboken, NJ, USA, 2001. [Google Scholar]
- Bilik, I.; Tabrikian, J. Maneuvering Target Tracking in the Presence of Glint using the Nonlinear Gaussian Mixture Kalman Filter. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 246–262. [Google Scholar] [CrossRef]
- Jazwinski, A.H. Stochastic Processes and Filtering Theory; Academic Press: New York, NY, USA, 1970; Volume 64. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. New extension of the Kalman filter to nonlinear systems. In Proceedings of the Signal Processing, Sensor Fusion, and Target Recognition VI, Orlando, FL, USA, 28 July 1997; Volume 3068, pp. 182–194. [Google Scholar] [CrossRef]
- Mahler, R.P.S. Statistical Multisource-Multitarget Information Fusion; Artech House: Norwood, MA, USA, 2007. [Google Scholar]
- Stone, L.D.; Streit, R.L.; Corwin, T.L. Bayesian Multiple Target Tracking, 2nd ed.; Artech House Publishers: Boston, MA, USA, 2014. [Google Scholar]
- Teoh, S.; Braunl, T. A Reliability Point and Kalman Filter-based Vehicle Tracking Technique. In Proceedings of the International Conference on Intelligent Systems (ICIS 2012), Penang, Malaysia, 19 May 2012; pp. 134–138. [Google Scholar]
- Li, T.C.; Su, J.; Liu, W.; Corchado, J.M. Approximate Gaussian conjugacy: Parametric recursive filtering under nonlinearity, multimodality, uncertainty, and constraint, and beyond. Front. Inf. Technol. Electron. Eng. 2017, 18, 1913–1939. [Google Scholar] [CrossRef]
- Doucet, A.; Johansen, A.M. A Tutorial on Particle Filtering and Smoothing: Fifteen Years Later; Handbook of nonlinear filtering; Available online: https://warwick.ac.uk/fac/sci/statistics/staff/academic-research/johansen/publications/dj11.pdf (accessed on 19 January 2019).
- Martino, L.; Elvira, V.; Camps-Valla, G. Group Importance Sampling for Particle Filtering and MCMC. Digit. Signal Process. 2018, 82, 133–151. [Google Scholar] [CrossRef]
- Zaitouny, A.A.; Stemler, T.; Judd, K. Tracking Rigid Bodies Using Only Position Data: A Shadowing Filter Approach Based on Newtonian Dynamics. Digit. Signal Process. 2017, 67, 81–90. [Google Scholar] [CrossRef]
- Zaitouny, A.A.; Stemler, T.; Small, M. Tracking a Single Pigeon Using a Shadowing Filter Algorithm. Ecol. Evolut. 2017, 7, 4419–4431. [Google Scholar] [CrossRef] [PubMed]
- Zaitouny, A.A.; Stemler, T.; Small, M. Modelling and Tracking the Flight Dynamics of Flocking Pigeons Based on Real GPS Data (Small Flock). Ecol. Model. 2017, 344, 62–72. [Google Scholar] [CrossRef]
- Anderson, B.D.O.; Moore, J.B. Optimal Filtering; Prentice-Hall: Englewood Cliffs, NJ, USA, 1979. [Google Scholar]
- Swanson, K.; Vautard, R. Four-dimensional variational assimilation and predictability in a quasi-geostrophic model. Tellus 1998, 50A, 369–390. [Google Scholar] [CrossRef]
- Ridout, D.; Judd, K. Convergence properties of gradient descent noise reduction. Phys. D 2002, 165, 27–48. [Google Scholar] [CrossRef]
- Stemler, T.; Judd, K. A guide to shadowing filters for forecasting and state estimation. Phys. D 2009, 238, 1260–1273. [Google Scholar] [CrossRef]
- Judd, K. Bayesian reconstruction of chaotic times series: Right results for the wrong reasons. Phys. Rev. E 2003, 67, 026212. [Google Scholar] [CrossRef]
- Judd, K.; Stemler, T. Failure of sequential bayesian filters and the success of shadowing filters in tracking of nonlinear deterministic and stochastic systems. Phys. Rev. E 2009, 79, 066206. [Google Scholar] [CrossRef] [PubMed]
- Judd, K.; Reynolds, C.A.; Rosmond, T. Toward Shadowing in Operational Weather Prediction; Technical Report NRL/MR/7530–04-18; Naval Research Laboratory: Monterey, CA, USA, 2004. [Google Scholar]
- Hartikainen, J.; Solin, A.; Särkkä, S. Optimal Filtering With Kalman Filters and Smoothers; Department of Biomedical Engineering and Computational Sciences, Aalto University School of Science; Available online: http://becs.aalto.fi/en/research/bayes/ekfukf/documentation.pdf (accessed on 19 January 2019).
- Bugallo, M.; Xu, S.; Djurić, P. Performance Comparison of EKF and Particle Filtering Methods for Maneuvering Targets. Digit. Signal Process. 2007, 17, 774–786. [Google Scholar] [CrossRef]
- Gustafsson, F.; Gunnarsson, F.; Bergman, N.; Forssell, U.; Jansson, J.; Karlsson, R.; Nordlund, P. Particle Filters for Positioning, Navigation and Tracking; Linköping University Electronic Press: Linköping, Sweden, 2001. [Google Scholar]
- Míguez, J. Analysis of Selection Methods for Cost-reference Particle Filtering with Applications to Maneuvering Target Tracking and Dynamic Optimization. Digit. Signal Process. 2007, 17, 787–807. [Google Scholar] [CrossRef]
- Press, W.H.; Teukolsky, S.A.; Vetterling, W.T.; Flannery, B.P. Numerical Recipes. In The Art of Scientific Computing; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Courant, R. Variational methods for the solution of problems of equilibrium and vibrations. Bull. Am. Math. Soc. 1943, 49, 1–23. [Google Scholar] [CrossRef]
- Judd, K. Tracking an Object with Unknown Accelerations using a Shadowing Filter. arXiv, 2015; arXiv:1502.07743. [Google Scholar]
- Chan, Y.T.; Ho, K.C. A simple and efficient estimator for hyperbolic location. IEEE Trans. Signal Process. 1994, 42, 1905–1915. [Google Scholar] [CrossRef]
- Chandrasekaran, S.; Golub, G.H.; Gu, M.; Sayed, A.H. Parameter estimation in the presence of bounded data uncertainties. SIAM J. Matrix Anal. Appl. 1998, 19, 235–252. [Google Scholar] [CrossRef]
- El Ghaoui, L.; Lebret, H. Robust solutions to least-squares problems with uncertain data. SIAM J. Matrix Anal. Appl. 1997, 18, 1035–1064. [Google Scholar] [CrossRef]
- Huang, Y.; Benesty, J.; Elko, G.W.; Mersereati, R.M. Real-time passive source localization: A practical linear-correction least-squares approach. IEEE Trans. Speech Audio Process. 2001, 9, 943–956. [Google Scholar] [CrossRef]
- Li, T.; Chen, H.; Sun, S.; Corchado, J.M. Joint smoothing and tracking based on continuous-time target trajectory fitting. IEEE Trans. Autom. Sci. Eng. 2018. [Google Scholar] [CrossRef]
- Li, T. Single-Road-Constrained Positioning Based on Deterministic Trajectory Geometry. IEEE Commun. Lett. 2019, 23, 80–83. [Google Scholar] [CrossRef]
- DeCesare, N.J.; Squires, J.R.; Kolbe, J.A. Effect of forest canopy on GPS-based movement data. Wildl. Soc. Bull. 2005, 33, 935–941. [Google Scholar] [CrossRef]
- Grémillet, D.; Dell’Omo, G.; Ryan, P.G.; Peters, G.; Ropert-Coudert, Y.; Weeks, S.J. Offshore diplomacy, or how seabirds mitigate intra-specific competition: A case study based on GPS tracking of Cape gannets from neighbouring colonies. Mar. Ecol. Prog. Ser. 2004, 268, 265–279. [Google Scholar] [CrossRef]
- Lorenz, K. Deterministic Nonperiodic Flow. J. Atmos. Sci. 1963, 20, 130–141. [Google Scholar] [CrossRef] [Green Version]
- Kantz, H.; Schreiber, T. Nonlinear Time Series Analysis; Cambridge University Press: Cambridge, UK, 1997. [Google Scholar]
- Urbanowicz, K.; Holyst, J.A.; Stemler, T.; Benner, H. Noise reduction in chaotic time series by a local projection with nonlinear constraints. ACTA Phys. Polonica B 2004, 35, 2175–2197. [Google Scholar]
- Lukeman, R.; Li, Y.X.; Edelstein-Keshet, L. Inferring individual rules from collective behavior. Proc. Natl. Acad. Sci. USA 2010, 107, 12576–12580. [Google Scholar] [CrossRef] [Green Version]
- Dieck Kattas, G.; Xu, X.K.; Small, M. Dynamical modeling of collective behavior from pigeon flight data: Flock cohesion and dispersion. PLoS Comput. Biol. 2012, 8, e1002449. [Google Scholar] [CrossRef]
- Dieck Kattas, G.; Perez-Barberia, F.J.; Small, M.; Xu, X.K.; Walker, D.M. Unraveling complexity in interspecies interaction through nonlinear dynamical models. Acta Ethol. 2013, 16, 21–30. [Google Scholar] [CrossRef]
- Godley, B.J.; Broderick, A.C.; Glen, F.; Hays, G.C. Post-nesting movements and submergence patterns of loggerhead marine turtles in the Mediterranean assessed by satellite tracking. J. Exp. Mar. Biol. Ecol. 2003, 287, 119–134. [Google Scholar] [CrossRef]
- Ryan, P.G.; Petersen, S.L.; Peters, G.; Grémillet, D. GPS tracking a marine predator: The effects of precision, resolution and sampling rate on foraging tracks of African Penguins. Mar. Biol. Int. J. Life Oceans Coast. Waters 2004, 145, 215–223. [Google Scholar] [CrossRef]
- Steiner, I.; Bürgi, C.; Werffeli, S.; Dell’Omo, G.; Valenti, P.; Tröster, G.; Wolfer, D.P.; Lipp, H.-P. A GPS logger and software for analysis of homing in pigeons and small mammals. Physiol. Behav. 2000, 71, 589–596. [Google Scholar] [CrossRef]













© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zaitouny, A.; Stemler, T.; Algar, S.D. Optimal Shadowing Filter for a Positioning and Tracking Methodology with Limited Information. Sensors 2019, 19, 931. https://doi.org/10.3390/s19040931
Zaitouny A, Stemler T, Algar SD. Optimal Shadowing Filter for a Positioning and Tracking Methodology with Limited Information. Sensors. 2019; 19(4):931. https://doi.org/10.3390/s19040931
Chicago/Turabian StyleZaitouny, Ayham, Thomas Stemler, and Shannon Dee Algar. 2019. "Optimal Shadowing Filter for a Positioning and Tracking Methodology with Limited Information" Sensors 19, no. 4: 931. https://doi.org/10.3390/s19040931
APA StyleZaitouny, A., Stemler, T., & Algar, S. D. (2019). Optimal Shadowing Filter for a Positioning and Tracking Methodology with Limited Information. Sensors, 19(4), 931. https://doi.org/10.3390/s19040931