Classification of Lifting Techniques for Application of A Robotic Hip Exoskeleton

 ,
, 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Experimental Setup
2.2. Experimental Protocol
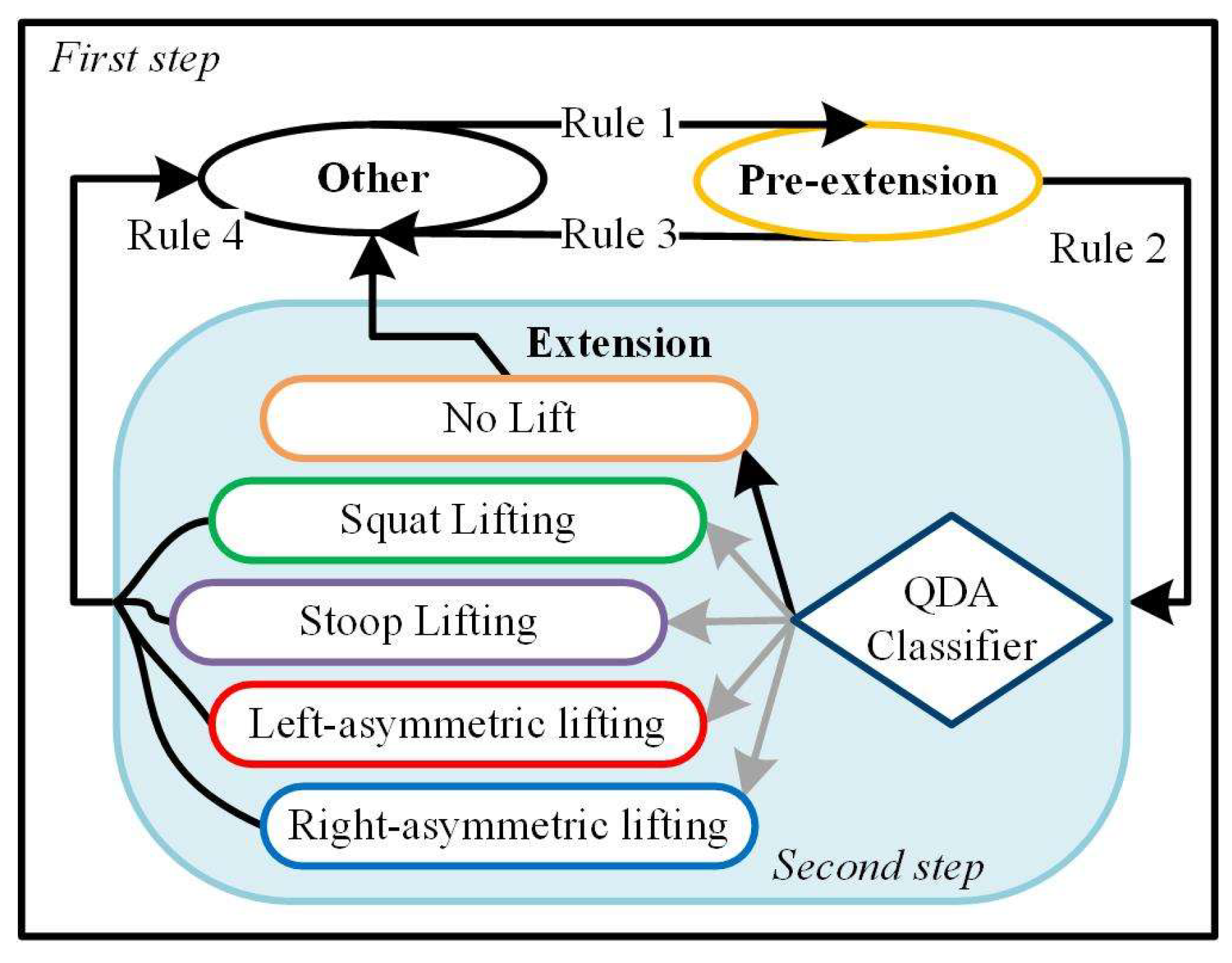
2.3. Recognition Algorithm
2.3.1. First-Step Algorithm
2.3.2. Second-Step Algorithm
2.4. Performance Evaluation
2.4.1. Lifting Technique Recognition
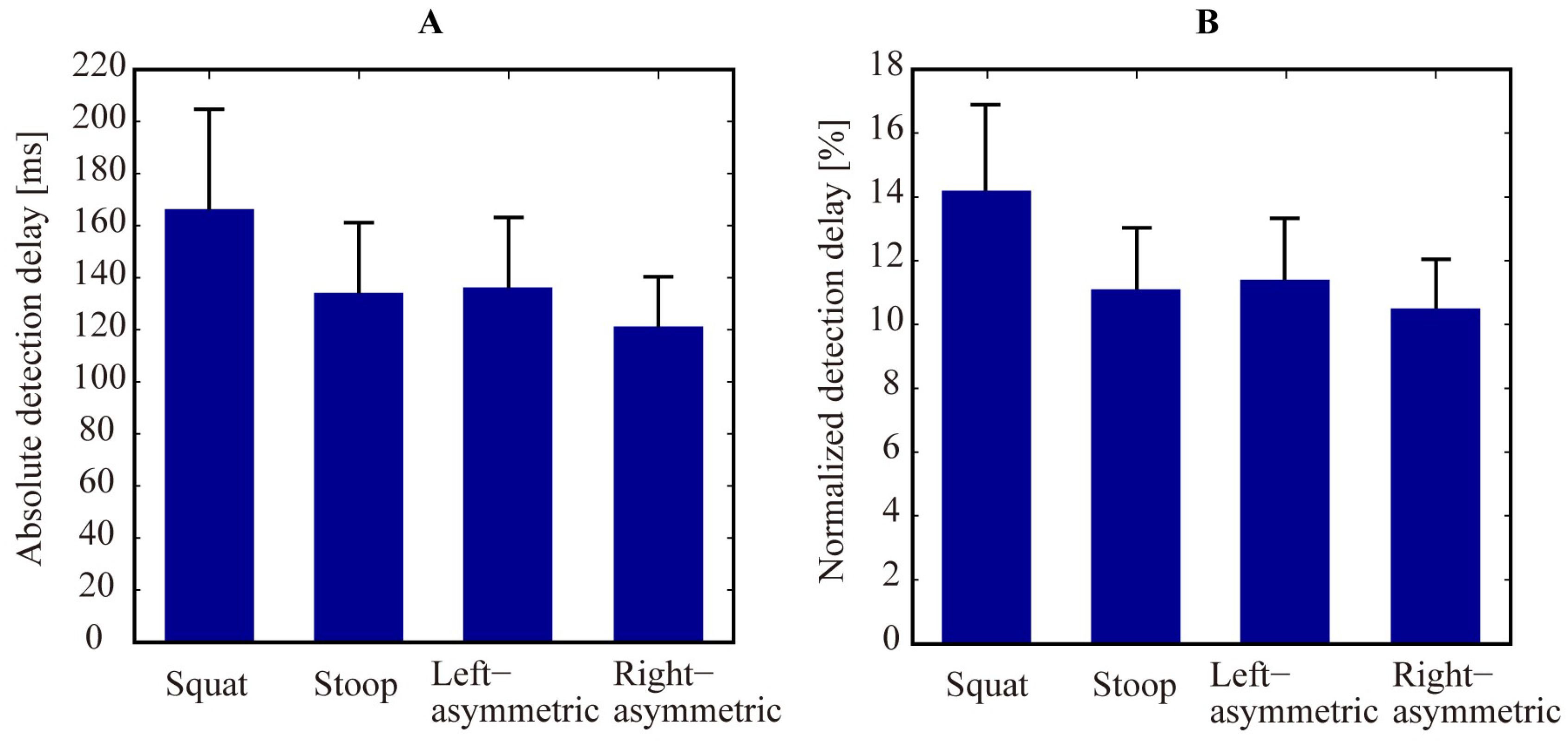
2.4.2. Lifting Detection Delay
3. Results
3.1. Lifting Technique Recognition
3.2. Lifting Detection Delay
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Parent-Thirion, A.; Biletta, I.; Cabrita, J.; Vargas, O.; Vermeylen, G.; Wilczynska, A.; Wilkens, M. Sixth European Working Conditions Survey—Overview Report; Publications Office of the European Union: Luxembourg, 2016. [Google Scholar]
- Punnett, L.; Prüss-Ütün, A.; Nelson, D.I.; Fingerhut, M.A.; Leigh, J.; Tak, S.; Phillips, S. Estimating the global burden of low back pain attributable to combined occupational exposures. Am. J. Ind. 2005, 48, 459–469. [Google Scholar] [CrossRef] [PubMed]
- da Costa, B.R.; Vieira, E.R. Risk factors for work-related musculoskeletal disorders: A systematic review of recent longitudinal studies. Am. J. Ind. 2010, 53, 285–323. [Google Scholar] [CrossRef] [PubMed]
- Wehner, M.; Rempel, D.; Kazerooni, H. Lower extremity exoskeleton reduces back forces in lifting. In Proceedings of the ASME 2009 Dynamic Systems and Control Conference, Hollywood, CA, USA, 12–14 October 2009; pp. 49–56. [Google Scholar]
- Masood, J.; Ortiz, J.; Fernández, J.; Mateos, L.A.; Caldwell, D.G. Mechanical design and analysis of light weight hip joint Parallel Elastic Actuator for industrial exoskeleton. In Proceedings of the 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 631–636. [Google Scholar]
- Abdoli-e, M.; Agnew, M.J.; Stevenson, J.M. An on-body personal lift augmentation device (PLAD) reduces EMG amplitude of erector spinae during lifting tasks. Clin. Biomech. 2006, 21, 456–465. [Google Scholar] [CrossRef] [PubMed]
- Näf, M.B.; Koopman, A.S.; Baltrusch, S.; Rodriguez-Guerrero, C.; Vanderborght, B.; Lefeber, D. Passive back support exoskeleton improves range of motion using flexible beams. Front. Robot. AI 2018, 5, 72. [Google Scholar] [CrossRef]
- Aida, T.; Nozaki, H.; Kobayashi, H. Development of muscle suit and application to factory laborers. In Proceedings of the International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; pp. 1027–1032. [Google Scholar]
- Kobayashi, H.; Aida, T.; Hashimoto, T. Muscle suit development and factory application. Int. J. Autom. Technol. 2009, 3, 709–715. [Google Scholar] [CrossRef]
- Kobayashi, H.; Nozaki, H. Development of muscle suit for supporting manual worker. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 1769–1774. [Google Scholar]
- Muramatsu, Y.; Kobayashi, H.; Sato, Y.; Jiaou, H.; Hashimoto, T.; Kobayashi, H. Quantitative Performance Analysis of Exoskeleton Augmenting Devices–Muscle Suit–for Manual Worker. Int. J. Autom. Technol. 2011, 5, 559–567. [Google Scholar] [CrossRef]
- Kadota, K.; Akai, M.; Kawashima, K.; Kagawa, T. Development of Power-Assist Robot Arm using pneumatic rubbermuscles with a balloon sensor. In Proceedings of the 18th IEEE International Symposium on Robot and Human Interactive Communication, Toyama, Japan, 27 September–2 October 2009; pp. 546–551. [Google Scholar]
- Li, X. Design of wearable power assist wear for low back support using pneumatic actuators. Int. J. Autom. Technol. 2013, 7, 228–236. [Google Scholar] [CrossRef]
- Naruse, K.; Kawai, S.; Kukichi, T. Three-dimensional lifting-up motion analysis for wearable power assist device of lower back support. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 2959–2964. [Google Scholar]
- Tanaka, T.; Satoh, Y.; Kaneko, S.I.; Suzuki, Y.; Sakamoto, N.; Seki, S. Smart suit: Soft power suit with semi-active assist mechanism-prototype for supporting waist and knee joint. In Proceedings of the International Conference on Control, Automation and Systems, Seoul, Korea, 14–17 October 2008; pp. 2002–2005. [Google Scholar]
- Yu, H.; Choi, I.S.; Han, K.-L.; Choi, J.Y.; Chung, G.; Suh, J. Development of a Stand-alone Powered Exoskeleton Robot Suit in Steel Manufacturing. ISIJ Int. 2015, 55, 2609–2617. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Huang, H.H. Lower-Back Robotic Exoskeleton. IEEE Robot. Autom. Mag. 2018, 25, 95–106. [Google Scholar] [CrossRef]
- Abdoli-e, M.; Stevenson, J.M. The effect of on-body lift assistive device on the lumbar 3D dynamic moments and EMG during asymmetric freestyle lifting. Clin. Biomech. 2008, 23, 372–380. [Google Scholar] [CrossRef] [PubMed]
- Abdoli-Eramaki, M.; Stevenson, J.M.; Reid, S.A.; Bryant, T.J. Mathematical and empirical proof of principle for an on-body personal lift augmentation device (PLAD). J. Biomech. 2007, 40, 1694–1700. [Google Scholar] [CrossRef] [PubMed]
- Lotz, C.A.; Agnew, M.J.; Godwin, A.A.; Stevenson, J.M. The effect of an on-body personal lift assist device (PLAD) on fatigue during a repetitive lifting task. J. Electromyogr. Kinesiol. 2009, 19, 331–340. [Google Scholar] [CrossRef] [PubMed]
- Whitfield, B.H.; Costigan, P.A.; Stevenson, J.M.; Smallman, C.L. Effect of an on-body ergonomic aid on oxygen consumption during a repetitive lifting task. Int. J. Ind. Ergon. 2014, 44, 39–44. [Google Scholar] [CrossRef]
- de Looze, M.P.; Bosch, T.; Krause, F.; Stadler, K.S.; O’Sullivan, L.W. Exoskeletons for industrial application and their potential effects on physical work load. Ergonomics 2016, 59, 671–681. [Google Scholar] [CrossRef] [PubMed]
- Baltrusch, S.; van Dieën, J.; van Bennekom, C.; Houdijk, H. The effect of a passive trunk exoskeleton on functional performance in healthy individuals. Appl. Ergon. 2018, 72, 94–106. [Google Scholar] [CrossRef] [PubMed]
- Baltrusch, S.; van Dieën, J.; Bruijn, S.; Koopman, A.; van Bennekom, C.; Houdijk, H. The Effect of a Passive Trunk Exoskeleton on Functional Performance and Metabolic Costs. In International Symposium on Wearable Robotics; Springer: Cham, Switzerland, 2018; pp. 229–233. [Google Scholar]
- Chen, B.; Grazi, L.; Lanotte, F.; Vitiello, N.; Crea, S. A Real-Time Lift Detection Strategy for a Hip Exoskeleton. Front. Neurorobot. 2018, 12, 17. [Google Scholar] [CrossRef] [PubMed]
- Lanotte, F.; Grazi, L.; Chen, B.; Vitiello, N.; Crea, S. A low-back exoskeleton can reduce the erector spinae muscles activity during freestyle symmetrical load lifting tasks. In Proceedings of the 7th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, Enschede, The Netherlands, 26–29 August 2018; pp. 701–706. [Google Scholar]
- Burgess-Limerick, R. Squat, stoop, or something in between? Int. J. Ind. Ergon. 2003, 31, 143–148. [Google Scholar] [CrossRef] [Green Version]
- van Dieën, J.H.; Hoozemans, M.J.; Toussaint, H.M. Stoop or squat: A review of biomechanical studies on lifting technique. Clin. Biomech. 1999, 14, 685–696. [Google Scholar] [CrossRef]
- Anderson, C.K.; Chaffin, D.B. A biomechanical evaluation of five lifting techniques. Appl. Ergon. 1986, 17, 2–8. [Google Scholar] [CrossRef]
- Hsiang, S.M.; Brogmus, G.E.; Courtney, T.K. Low back pain (LBP) and lifting technique—A review. Int. J. Ind. Ergon. 1997, 19, 59–74. [Google Scholar] [CrossRef]
- Mittal, M.; Malik, S. Biomechanical evaluation of lift postures in adult Koli female labourers. Ergonomics 1991, 34, 103–108. [Google Scholar] [CrossRef] [PubMed]
- Trafimow, J.; Schipplein, O.; Novak, G.; Andersson, G. The effects of quadriceps fatigue on the technique of lifting. Spine 1993, 18, 364–367. [Google Scholar] [CrossRef] [PubMed]
- Leskinen, T.; Stålhammar, H.; Kuorinka, I.; Troup, J. A dynamic analysis of spinal compression with different lifting techniques. Ergonomics 1983, 26, 595–604. [Google Scholar] [CrossRef] [PubMed]
- Garg, A.; Badger, D. Maximum acceptable weights and maximum voluntary isometric strengths for asymmetric lifting. Ergonomics 1986, 29, 879–892. [Google Scholar] [CrossRef] [PubMed]
- Bogduk, N. The lumbar disc and low back pain. Neurosurg. Clin. N. Am. 1991, 2, 791–806. [Google Scholar]
- Giovacchini, F.; Vannetti, F.; Fantozzi, M.; Cempini, M.; Cortese, M.; Parri, A.; Yan, T.; Lefeber, D.; Vitiello, N. A light-weight active orthosis for hip movement assistance. Robot. Auton. Syst. 2015, 73, 123–134. [Google Scholar] [CrossRef]
- Chen, B.; Grazi, L.; Lanotte, F.; Vitiello, N.; Crea, S. Lift Movement Detection with a QDA Classifier for an Active Hip Exoskeleton. In Proceedings of the International Symposium on Wearable Robotics, Pisa, Italy, 16–20 October 2018; Springer: Cham, Switzerland, 2018; pp. 224–228. [Google Scholar]
- Madgwick, S. An Efficient Orientation Filter for Inertial and Inertial/Magnetic Sensor Arrays; University of Bristol: Bristol, UK, 2010; Volume 25, pp. 113–118. [Google Scholar]
- Chen, B.; Zheng, E.; Wang, Q.; Wang, L. A new strategy for parameter optimization to improve phase-dependent locomotion mode recognition. Neurocomputing 2015, 149, 585–593. [Google Scholar] [CrossRef]
- Naruse, K.; Kawai, S.; Yokoi, H.; Kakazu, Y. Development of wearable exoskeleton power assist system for lower back support. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 27–31 October 2003; pp. 3630–3635. [Google Scholar]
- Kawai, S.; Yokoi, H.; Naruse, K.; Kakazu, Y. Study for control of a power assist device. Development of an EMG based controller considering a human model. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems, Sendai, Japan, 28 September–2 October 2004; pp. 2283–2288. [Google Scholar]
- Cevzar, M.; Petrič, T.; Jamšek, M.; Babič, J. Real-Time Control of Quasi-Active Hip Exoskeleton Based on Gaussian Mixture Model Approach. In Proceedings of the International Symposium on Wearable Robotics, Pisa, Italy, 16–20 October 2018; pp. 244–248. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Definition and Description |
|---|---|
| , left and right average hip flexion angle | |
| , trunk flexion angle | |
| , thigh flexion angle | |
| , difference between left and right hip flexion angle | |
| Standard deviation of from to | |
| , difference of from to | |
| , adjusted yaw angle of the IMU |
| Estimated Mode | ||||||
|---|---|---|---|---|---|---|
| No-Lift | Squat | Stoop | Left-Asymmetric | Right-Asymmetric | ||
| Actual mode | No-lift | 100.00 ± 0.00 | 0.00 ± 0.00 | 0.00 ± 0.00 | 0.00 ± 0.00 | 0.00 ± 0.00 |
| Squat | 0.67 ± 1.38 | 98.40 ± 2.25 | 0.22 ± 0.86 | 0.00 ± 0.00 | 0.71 ± 2.02 | |
| Stoop | 0.00 ± 0.00 | 0.00 ± 0.00 | 100.00 ± 0.00 | 0.00 ± 0.00 | 0.00 ± 0.00 | |
| Left-asymmetric | 0.00 ± 0.00 | 0.00 ± 0.00 | 0.00 ± 0.00 | 100.00 ± 0.00 | 0.00 ± 0.00 | |
| Right-asymmetric | 0.00 ± 0.00 | 0.00 ± 0.00 | 0.00 ± 0.00 | 0.00 ± 0.00 | 100.00 ± 0.00 | |
| Estimated Mode | ||||||
|---|---|---|---|---|---|---|
| No Lift | Squat | Stoop | Left-Asymmetric | Right-Asymmetric | ||
| Actual mode | No lift | 98.67 ± 3.99 | 1.33 ± 3.99 | 0.00 ± 0.00 | 0.00 ± 0.00 | 0.00 ± 0.00 |
| Squat | 0.24 ± 0.92 | 98.81 ± 2.20 | 0.48 ± 1.26 | 0.00 ± 0.00 | 0.48 ± 1.26 | |
| Stoop | 0.00 ± 0.00 | 0.00 ± 0.00 | 99.29 ± 2.77 | 0.71 ± 2.77 | 0.00 ± 0.00 | |
| Left-asymmetric | 0.00 ± 0.00 | 0.00 ± 0.00 | 0.00 ± 0.00 | 100.00 ± 0.00 | 0.00 ± 0.00 | |
| Right-asymmetric | 0.00 ± 0.00 | 0.00 ± 0.00 | 0.24 ± 0.92 | 0.00 ± 0.00 | 99.76 ± 0.92 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, B.; Lanotte, F.; Grazi, L.; Vitiello, N.; Crea, S. Classification of Lifting Techniques for Application of A Robotic Hip Exoskeleton. Sensors 2019, 19, 963. https://doi.org/10.3390/s19040963
Chen B, Lanotte F, Grazi L, Vitiello N, Crea S. Classification of Lifting Techniques for Application of A Robotic Hip Exoskeleton. Sensors. 2019; 19(4):963. https://doi.org/10.3390/s19040963
Chicago/Turabian StyleChen, Baojun, Francesco Lanotte, Lorenzo Grazi, Nicola Vitiello, and Simona Crea. 2019. "Classification of Lifting Techniques for Application of A Robotic Hip Exoskeleton" Sensors 19, no. 4: 963. https://doi.org/10.3390/s19040963
APA StyleChen, B., Lanotte, F., Grazi, L., Vitiello, N., & Crea, S. (2019). Classification of Lifting Techniques for Application of A Robotic Hip Exoskeleton. Sensors, 19(4), 963. https://doi.org/10.3390/s19040963