Estimating Snow Depth and Leaf Area Index Based on UAV Digital Photogrammetry



Abstract
:
1. Introduction
2. Materials and Methods
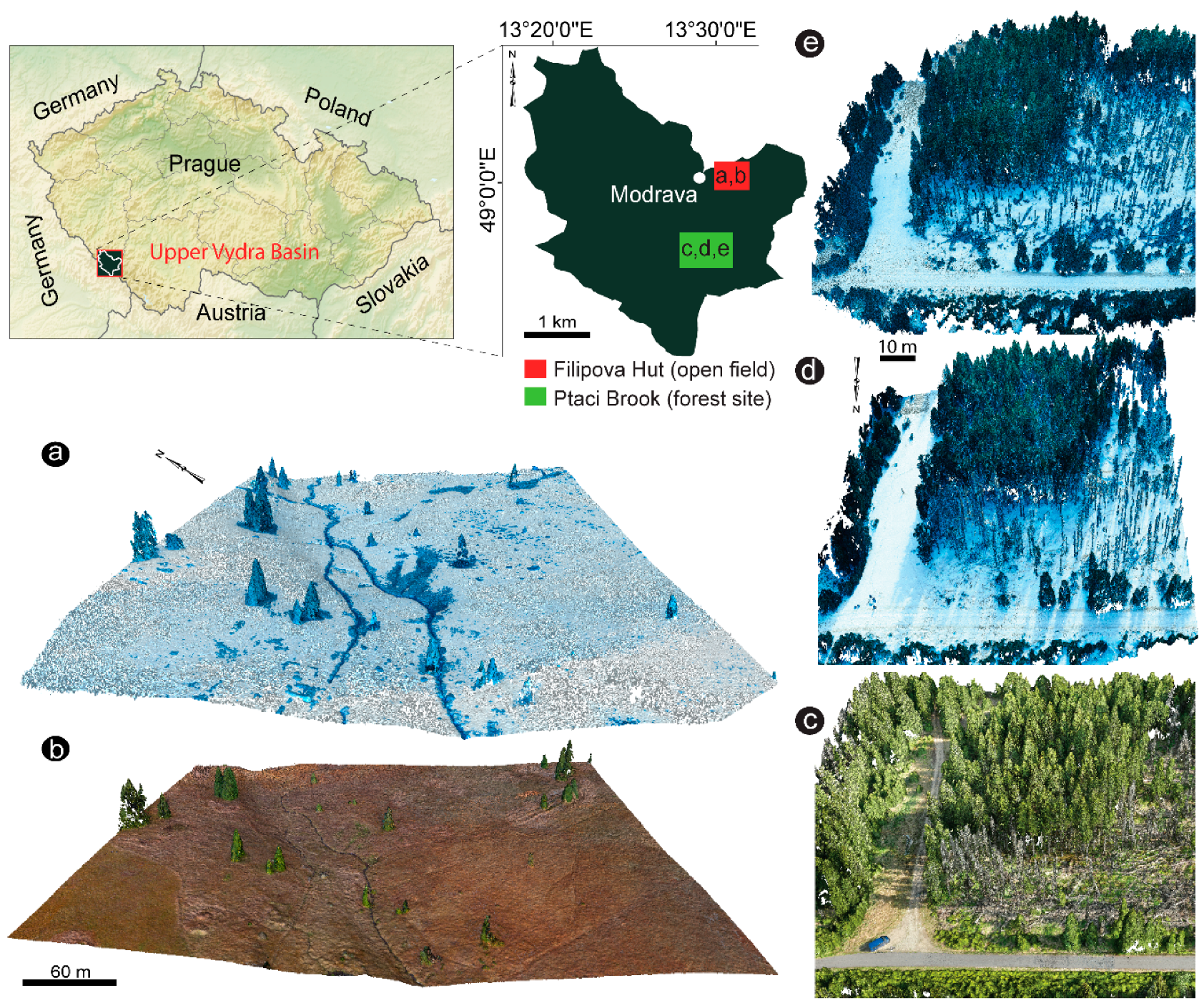
2.1. Study Test Sites
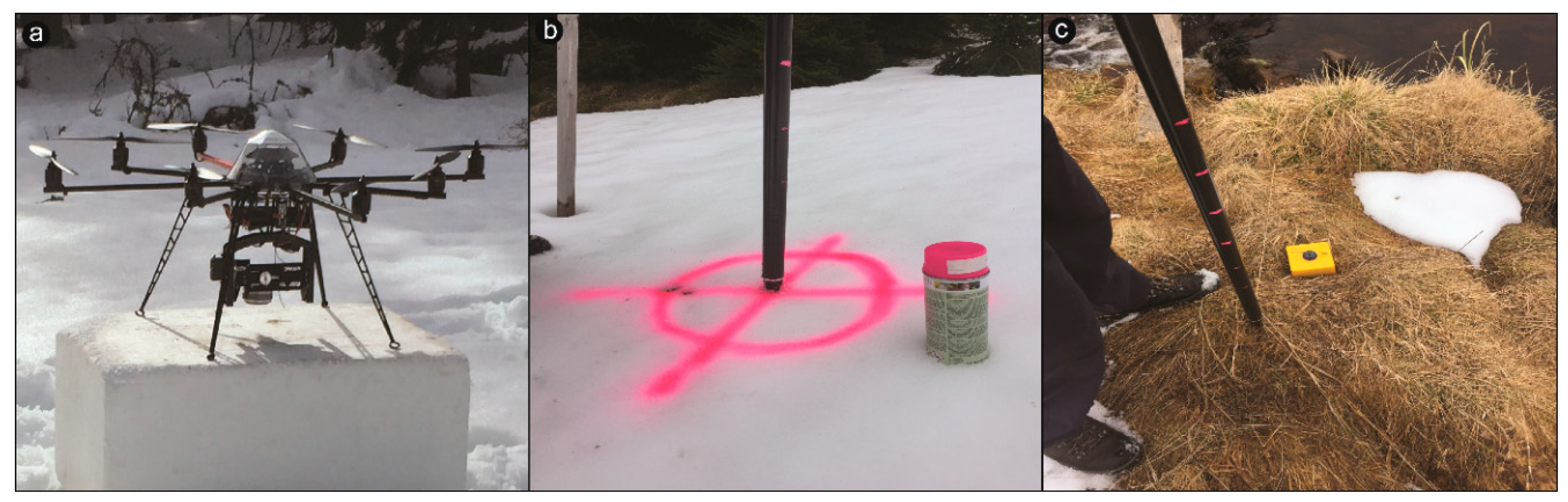
2.2. UAV Monitoring
2.3. Photogrammetric Processing
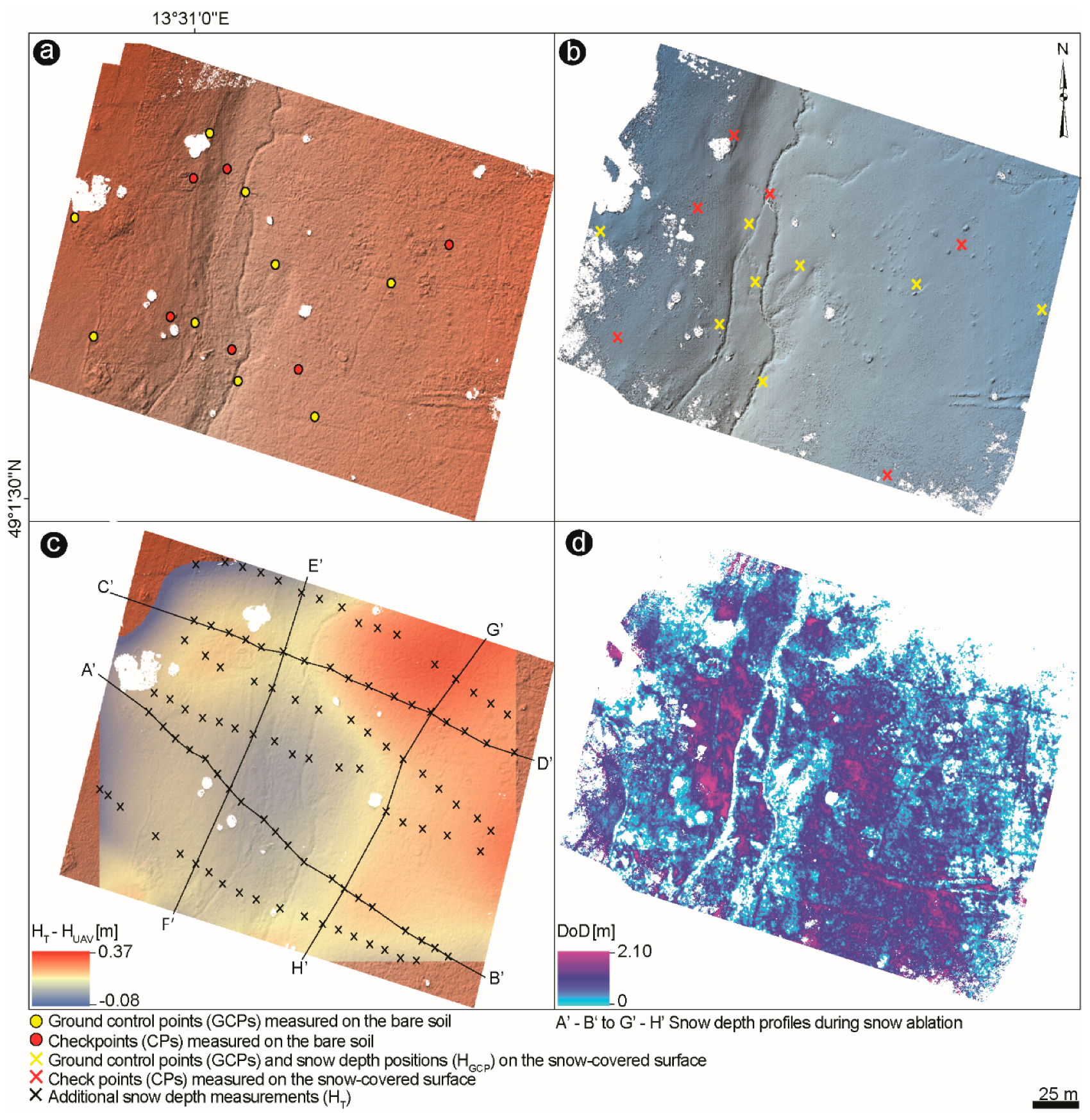
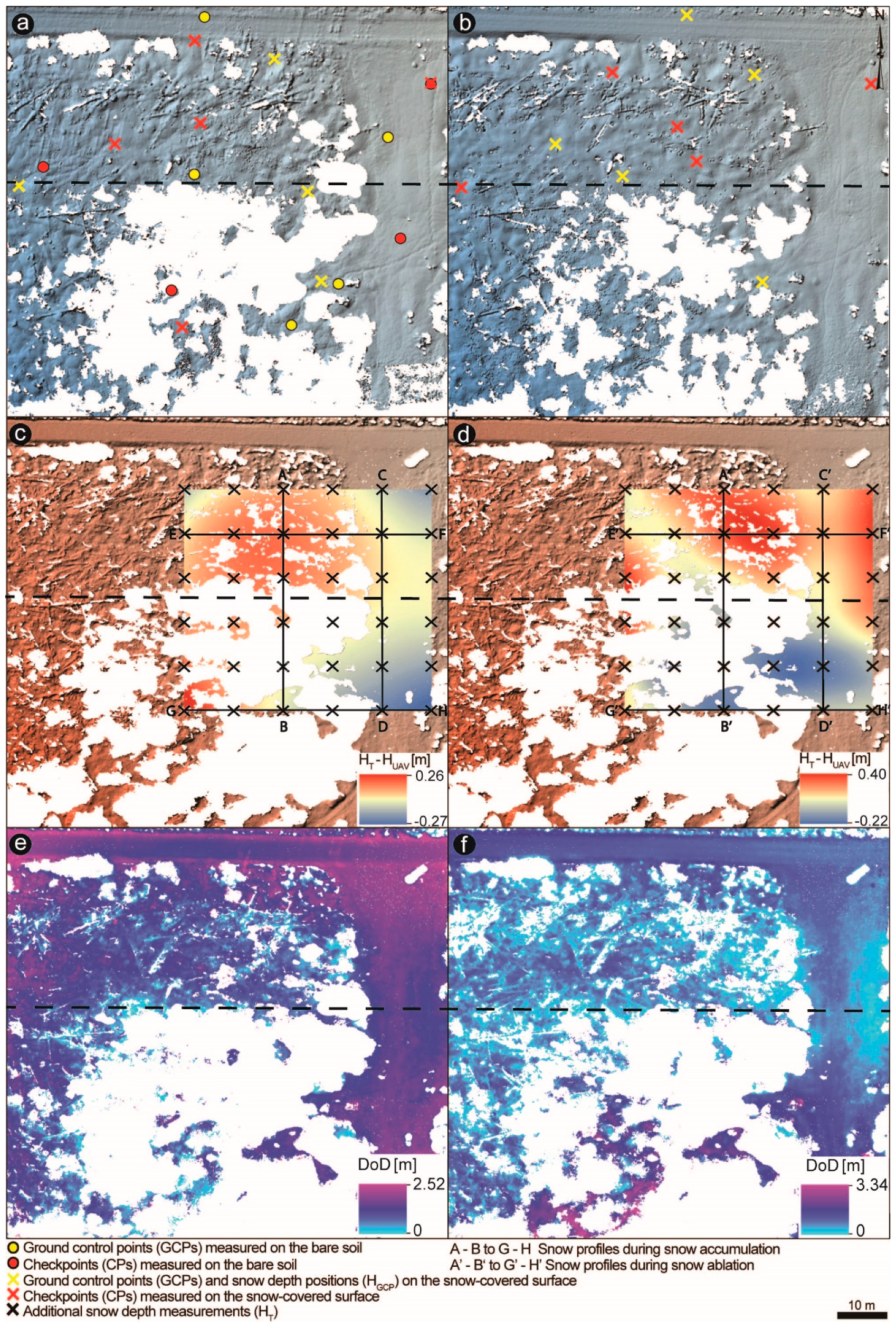
2.4. Snow Depth Data Acquisition and Analysis
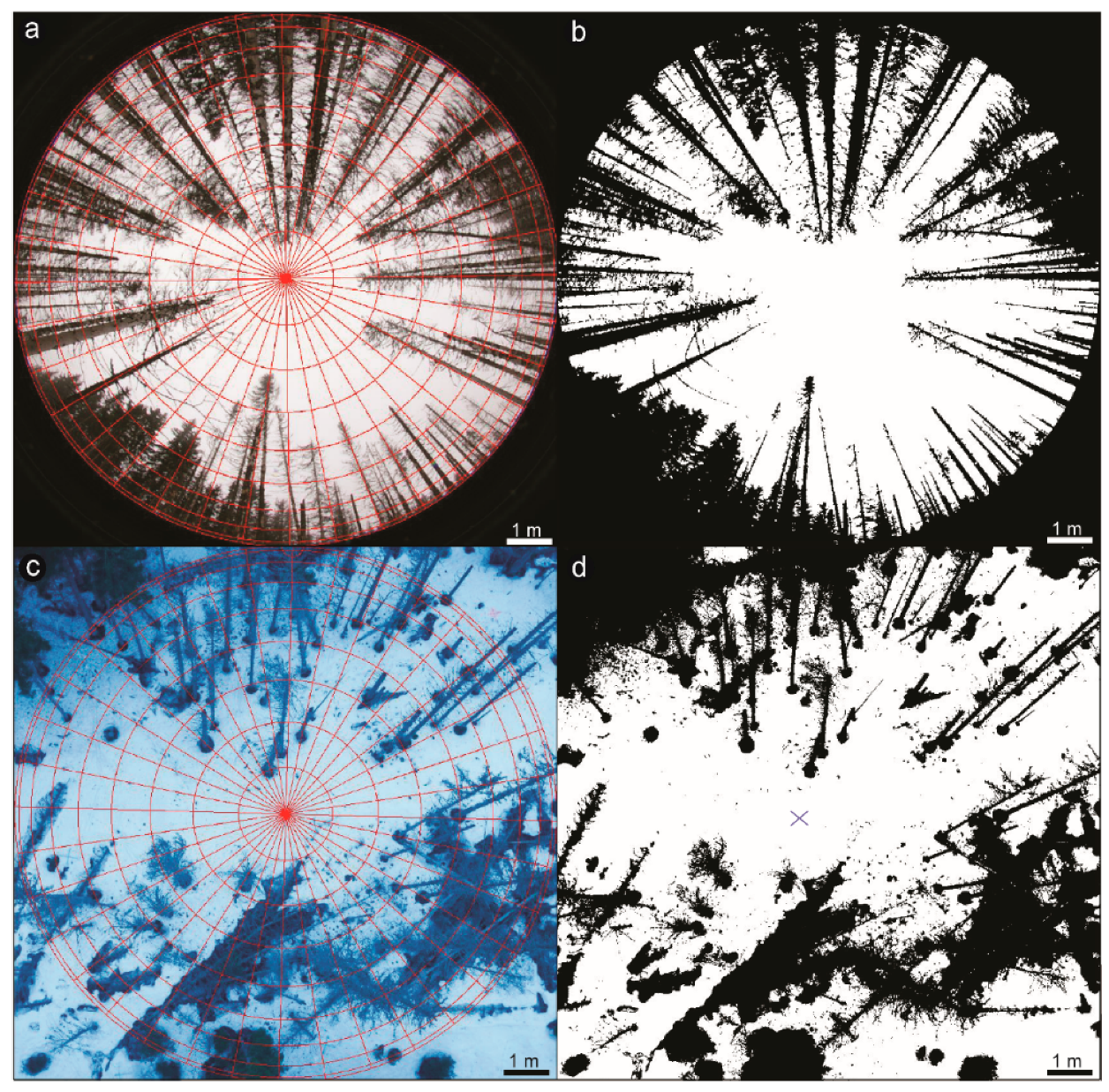
2.5. LAI Assessment
3. Results
3.1. Study Sites and Data Acquisition
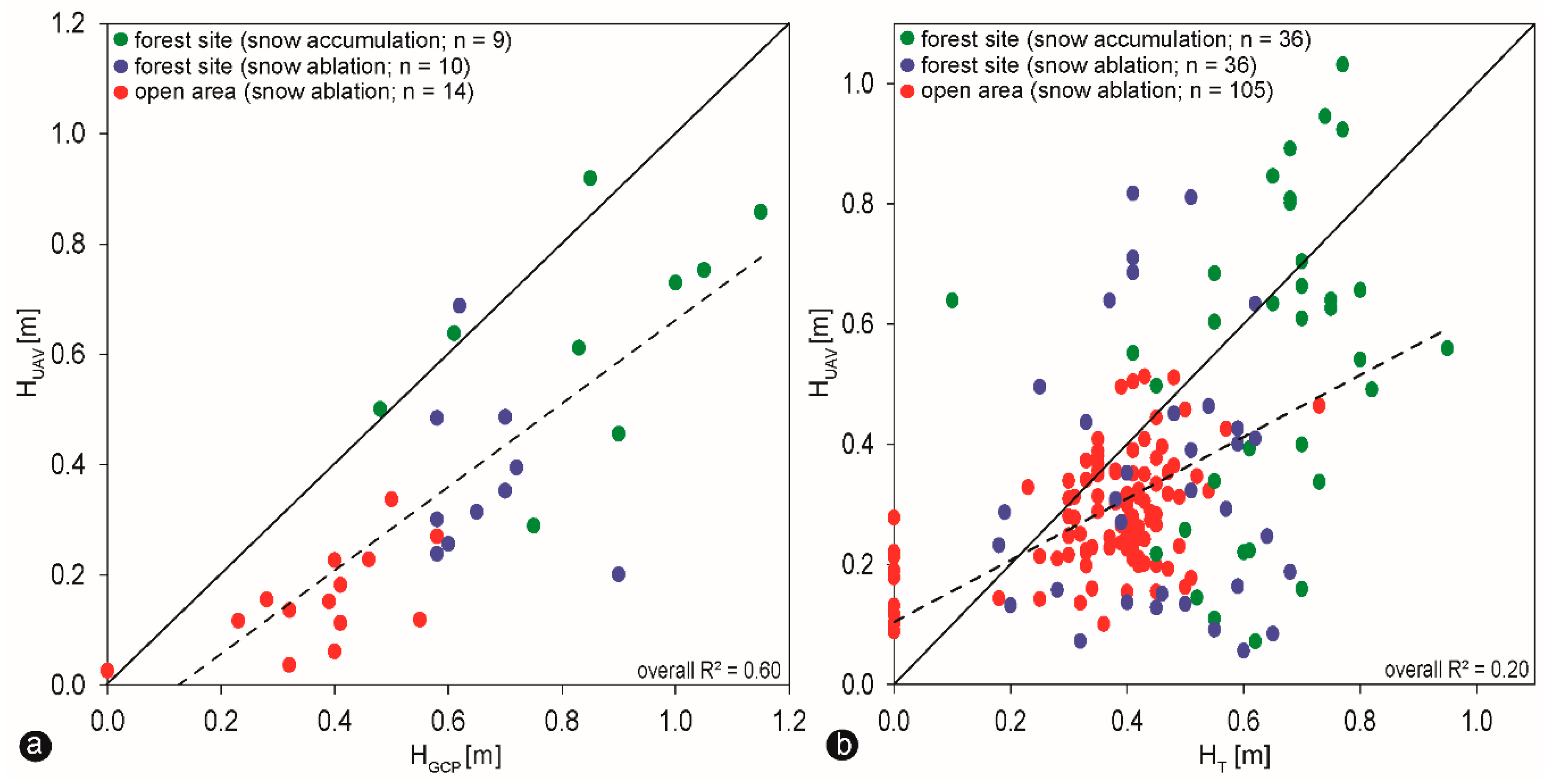
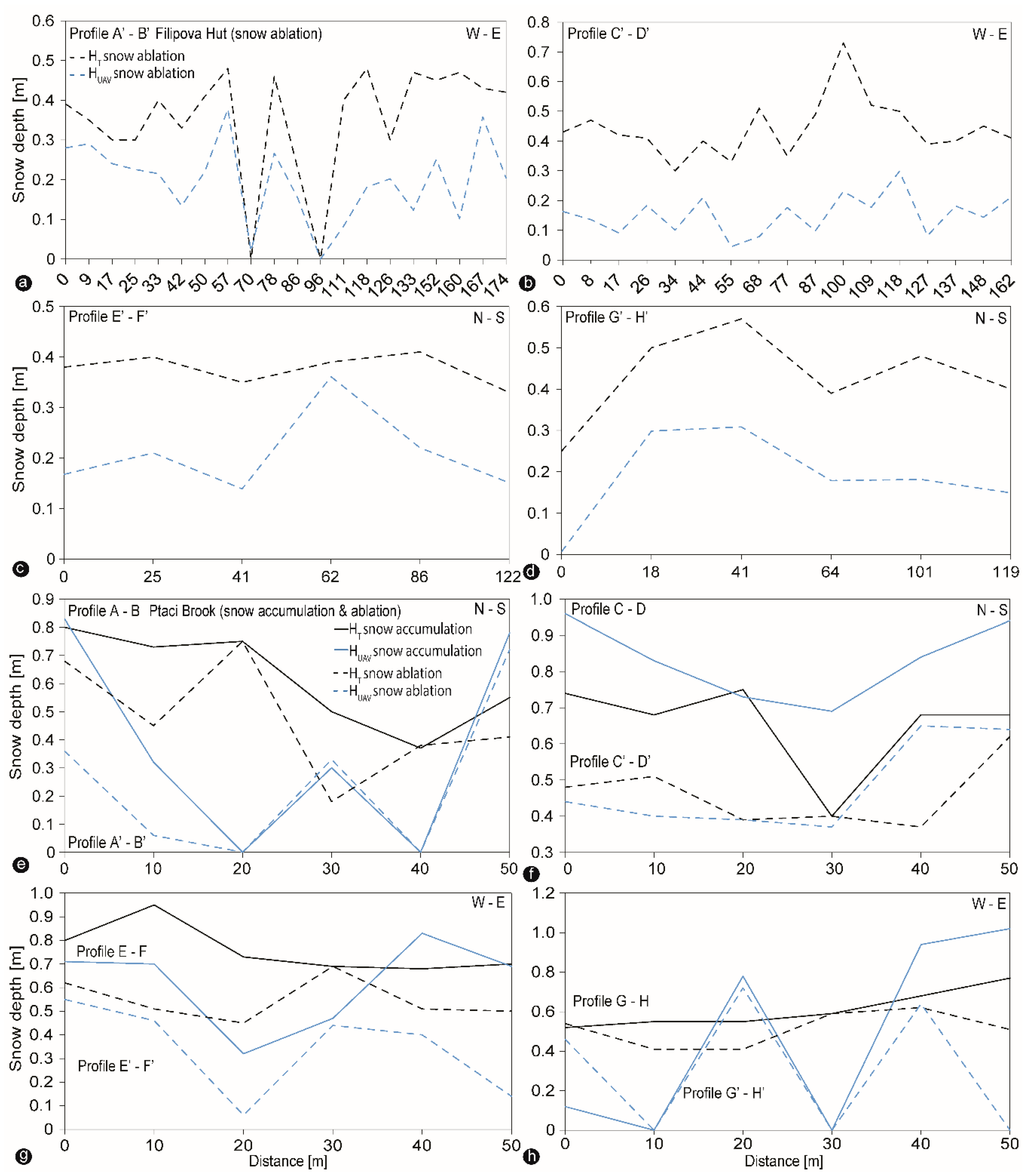
3.2. UAV-Based Snow Depth Estimations vs. Manual Snow Depth
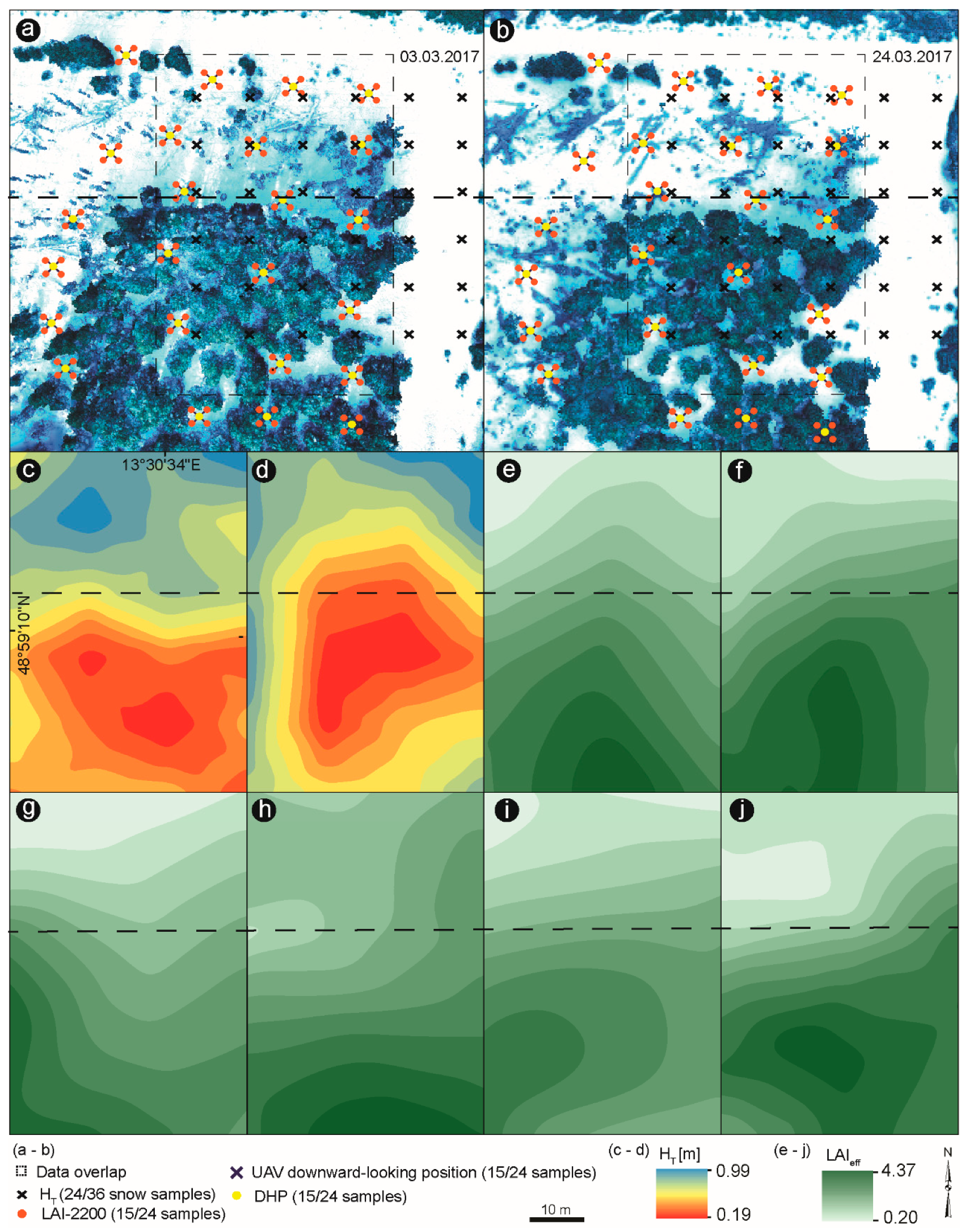
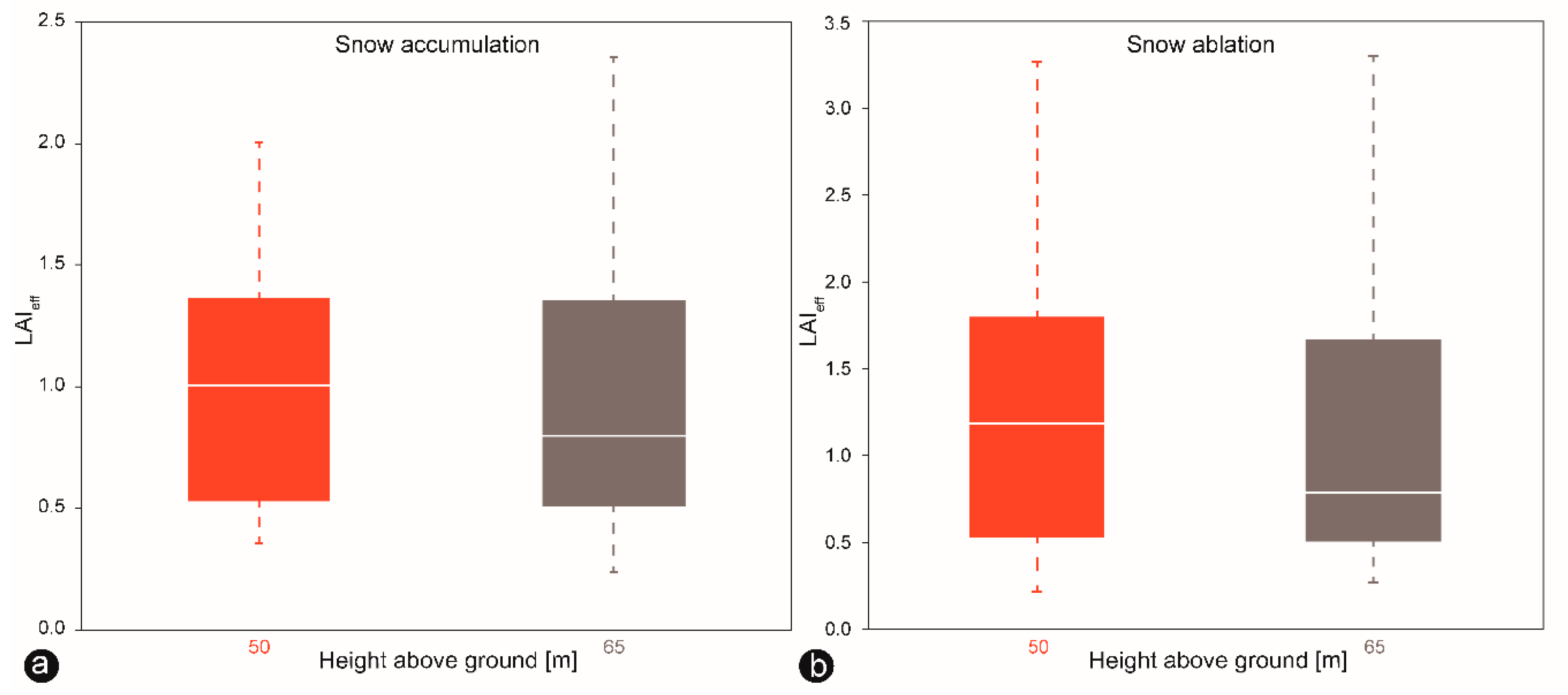
3.3. Optical Indirect Estimation of LAIeff
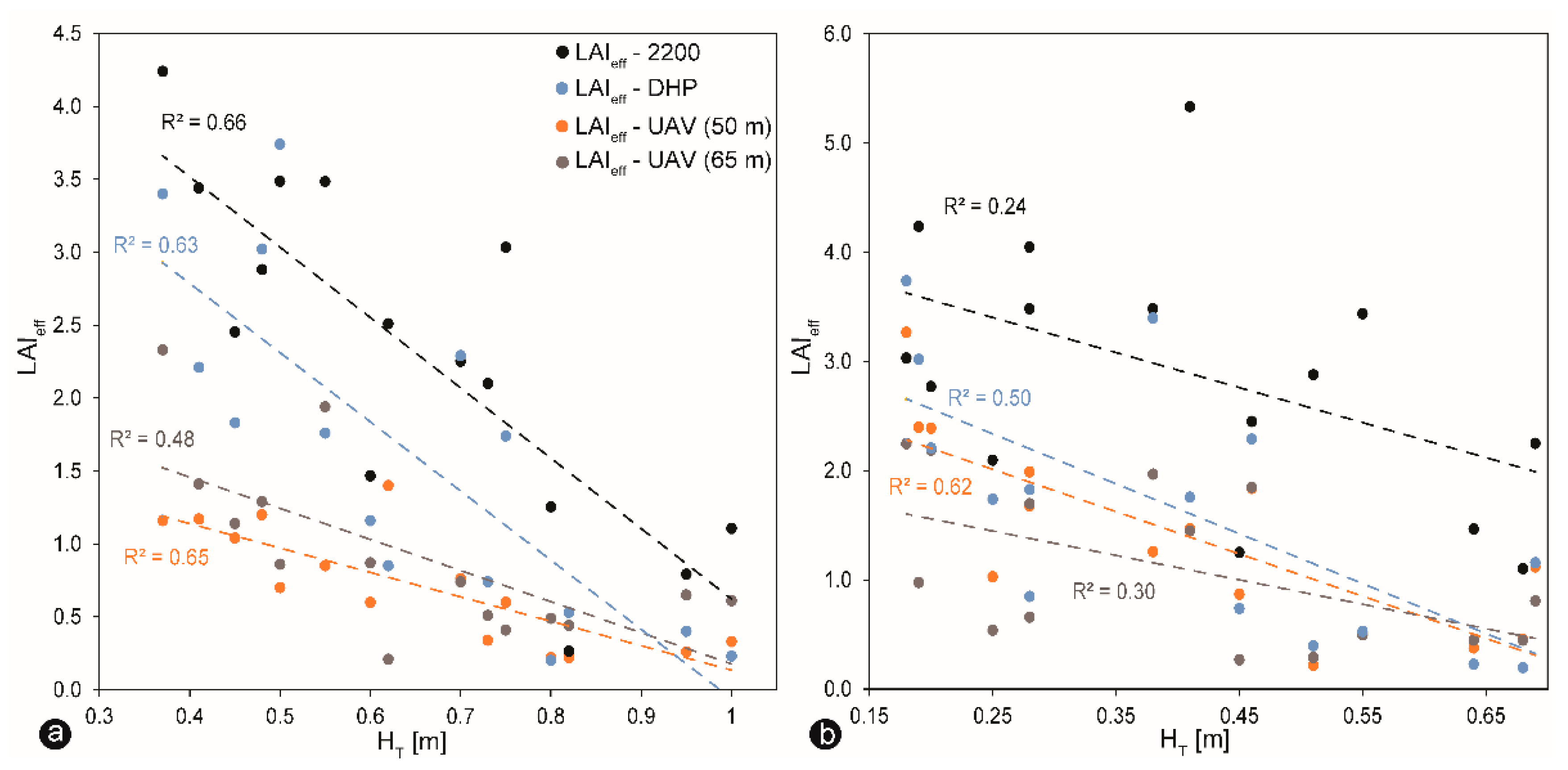
3.4. Relationship between Indirect Winter LAIeff and Snow Depth
4. Discussion
4.1. Snow Depth Validation of Open vs. Forest Site
4.2. Validation of the Winter LAI
4.3. Validation between Snow Depth and LAI
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, D.; Hollaus, M.; Puttonen, E.; Pfeifer, N. Automatic and self-adaptive stem reconstruction in landslide-affected forests. Remote Sens. 2016, 8, 974. [Google Scholar] [CrossRef]
- Dong, C. Remote sensing, hydrological modeling and in situ observations in snow cover research: A review. J. Hydrol. 2018, 561, 573–583. [Google Scholar] [CrossRef]
- Dong, C.; Menzel, L. Snow process monitoring in montane forests with time-lapse photography. Hydrol. Process. 2017, 31, 2872–2886. [Google Scholar] [CrossRef]
- Jenicek, M.; Pevna, H.; Matejka, O. Canopy structure and topography effects on snow distribution at a catchment scale: Application of multivariate approaches. J. Hydrol. Hydromech. 2018, 66. [Google Scholar] [CrossRef]
- Pomeroy, J.W.; Gray, D.M.; Hedstrom, N.R.; Janowicz, J.R. Physically based estimation of seasonal snow accumulation in the boreal forest. In Proceedings of the 59th eastern snow conference, Stowe, VT, USA, 5–7 June 2002; pp. 93–108. [Google Scholar] [CrossRef]
- Ellis, C.R.; Pomeroy, J.W.; Essery, R.L.H.; Link, T.E. Effects of needleleaf forest cover on radiation and snowmelt dynamics in the Canadian Rocky Mountains. Can. J. For. Res. 2011, 41, 608–620. [Google Scholar] [CrossRef]
- Melloh, R.A.; Hardy, J.P.; Davis, R.E.; Robinson, P.B. Spectral albedo/reflectance of littered forest snow during the melt season. Hydrol. Process. 2001, 15, 3409–3422. [Google Scholar] [CrossRef]
- Elder, K.; Dozier, J.; Michaelsen, J. Snow accumulation and distribution in an Alpine Watershed. Water Resour. Res. 1991. [Google Scholar] [CrossRef]
- Strasser, U.; Warscher, M.; Liston, G.E. Modeling Snow–Canopy Processes on an Idealized Mountain. J. Hydrometeorol. 2011, 12, 663–677. [Google Scholar] [CrossRef]
- Garvelmann, J.; Pohl, S.; Weiler, M. From observation to the quantification of snow processes with a time-lapse camera network. Hydrol. Earth Syst. Sci. 2013, 17, 1415–1429. [Google Scholar] [CrossRef] [Green Version]
- Moeser, D.; Roubinek, J.; Schleppi, P.; Morsdorf, F.; Jonas, T. Canopy closure, LAI and radiation transfer from airborne LiDAR synthetic images. Agric. For. Meteorol. 2014, 197, 158–168. [Google Scholar] [CrossRef]
- Lundquist, J.D.; Dickerson-Lange, S.E.; Lutz, J.A.; Cristea, N.C. Lower forest density enhances snow retention in regions with warmer winters: A global framework developed from plot-scale observations and modeling: Forests and Snow Retention. Water Resour. Res. 2013, 49, 6356–6370. [Google Scholar] [CrossRef]
- Revuelto, J.; López-Moreno, J.-I.; Azorin-Molina, C.; Alonso-González, E.; Sanmiguel-Vallelado, A. Small-Scale Effect of Pine Stand Pruning on Snowpack Distribution in the Pyrenees Observed with a Terrestrial Laser Scanner. Forests 2016, 7, 166. [Google Scholar] [CrossRef]
- Stähli, M.; Gustafsson, D. Long-term investigations of the snow cover in a subalpine semi-forested catchment. Hydrol. Process. 2006, 20, 411–428. [Google Scholar] [CrossRef]
- Stähli, M.; Jonas, T.; Gustafsson, D. The role of snow interception in winter-time radiation processes of a coniferous sub-alpine forest. Hydrol. Process. 2009, 23, 2498–2512. [Google Scholar] [CrossRef]
- Varhola, A.; Coops, N.C.; Weiler, M.; Moore, R.D. Forest canopy effects on snow accumulation and ablation: An integrative review of empirical results. J. Hydrol. 2010, 392, 219–233. [Google Scholar] [CrossRef]
- Essery, R.; Morin, S.; Lejeune, Y.; B Ménard, C. A comparison of 1701 snow models using observations from an alpine site. Adv. Water Resour. 2013, 55, 131–148. [Google Scholar] [CrossRef]
- Avanzi, F.; Bianchi, A.; Cina, A.; De Michele, C.; Maschio, P.; Pagliari, D.; Passoni, D.; Pinto, L.; Piras, M.; Rossi, L. Centimetric Accuracy in Snow Depth Using Unmanned Aerial System Photogrammetry and a MultiStation. Remote Sens. 2018, 10, 765. [Google Scholar] [CrossRef]
- Jin, S.; Qian, X.; Kutoglu, H. Snow Depth Variations Estimated from GPS-Reflectometry: A Case Study in Alaska from L2P SNR Data. Remote Sens. 2016, 8, 63. [Google Scholar] [CrossRef]
- Larson, K.M. GPS interferometric reflectometry: Applications to surface soil moisture, snow depth, and vegetation water content in the western United States: GPS interferometric reflectometry. Wiley Interdiscip. Rev. Water 2016, 3, 775–787. [Google Scholar] [CrossRef]
- McCreight, J.L.; Small, E.E.; Larson, K.M. Snow depth, density, and SWE estimates derived from GPS reflection data: Validation in the western US. Water Resour. Res. 2014, 50, 6892–6909. [Google Scholar] [CrossRef]
- Deems, J.S.; Painter, T.H.; Finnegan, D.C. Lidar measurement of snow depth: A review. J. Glaciol. 2013, 59, 467–479. [Google Scholar] [CrossRef]
- Grünewald, T.; Lehning, M. Are flat-field snow depth measurements representative? A comparison of selected index sites with areal snow depth measurements at the small catchment scale: Representativeness of flat field snow depth measurements. Hydrol. Process. 2015, 29, 1717–1728. [Google Scholar] [CrossRef]
- Grünewald, T.; Schirmer, M.; Mott, R.; Lehning, M. Spatial and temporal variability of snow depth and ablation rates in a small mountain catchment. Cryosphere 2010, 4, 215–225. [Google Scholar] [CrossRef] [Green Version]
- Jaakkola, A.; Hyyppa, J.; Puttonen, E. Measurement of Snow Depth Using a Low-Cost Mobile Laser Scanner. IEEE Geosci. Remote Sens. Lett. 2014, 11, 587–591. [Google Scholar] [CrossRef]
- Grünewald, T.; Stötter, J.; Pomeroy, J.W.; Dadic, R.; Moreno Baños, I.; Marturià, J.; Spross, M.; Hopkinson, C.; Burlando, P.; Lehning, M. Statistical modelling of the snow depth distribution in open alpine terrain. Hydrol. Earth Syst. Sci. 2013, 17, 3005–3021. [Google Scholar] [CrossRef] [Green Version]
- Bühler, Y.; Marty, M.; Egli, L.; Veitinger, J.; Jonas, T.; Thee, P.; Ginzler, C. Snow depth mapping in high-alpine catchments using digital photogrammetry. Cryosphere 2015, 9, 229–243. [Google Scholar] [CrossRef] [Green Version]
- Nolan, M.; Larsen, C.; Sturm, M. Mapping snow-depth from manned-aircraft on landscape scales at centimeter resolution using Structure-from-Motion photogrammetry. Cryosphere Discuss. 2015, 9, 333–381. [Google Scholar] [CrossRef]
- Prokop, A.; Schirmer, M.; Rub, M.; Lehning, M.; Stocker, M. A comparison of measurement methods: Terrestrial laser scanning, tachymetry and snow probing for the determination of the spatial snow-depth distribution on slopes. Ann. Glaciol. 2008, 49, 210–216. [Google Scholar] [CrossRef]
- Machguth, H.; Eisen, O.; Paul, F.; Hoelzle, M. Strong spatial variability of snow accumulation observed with helicopter-borne GPR on two adjacent Alpine glaciers. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef] [Green Version]
- Farinotti, D.; Magnusson, J.; Huss, M.; Bauder, A. Snow accumulation distribution inferred from time-lapse photography and simple modelling. Hydrol. Process. 2010, 24, 2045–2201. [Google Scholar] [CrossRef]
- Parajka, J.; Haas, P.; Kirnbauer, R.; Jansa, J.; Blöschl, G. Potential of time-lapse photography of snow for hydrological purposes at the small catchment scale: Potential of time-lapse photography of snow for hydrological purposes. Hydrol. Process. 2012, 26, 3327–3337. [Google Scholar] [CrossRef]
- Dietz, A.J.; Kuenzer, C.; Gessner, U.; Dech, S. Remote sensing of snow—A review of available methods. Int. J. Remote Sens. 2012, 33, 4094–4134. [Google Scholar] [CrossRef]
- Cimoli, E.; Marcer, M. Digital Elevation Model Reconstruction of a Glaciarized Basin Using Land-Based Structure from Motion. Available online: https://pdfs.semanticscholar.org/8757/eb995c9538664abb477287b473b4fac82a2c.pdf?_ga=2.114940608.653756116.1551329016-1294446320.1529472521 (accessed on 28 February 2019).
- Elder, K.; Rosenthal, W.; Davis, R.E. Estimating the spatial distribution of snow water equivalence in a montane watershed. Hydrol. Process. 1998, 12, 1793–1808. [Google Scholar] [CrossRef]
- Vander Jagt, B.J.; Durand, M.T.; Margulis, S.A.; Kim, E.J.; Molotch, N.P. On the characterization of vegetation transmissivity using LAI for application in passive microwave remote sensing of snowpack. Remote Sens. Environ. 2015, 156, 310–321. [Google Scholar] [CrossRef]
- De Michele, C.; Avanzi, F.; Passoni, D.; Barzaghi, R.; Pinto, L.; Dosso, P.; Ghezzi, A.; Gianatti, R.; Della Vedova, G. Microscale variability of snow depth using U.A.S. technology. Cryosphere 2015, 9, 1047–1075. [Google Scholar] [CrossRef]
- Bühler, Y.; Adams, M.S.; Bösch, R.; Stoffel, A. Mapping snow depth in alpine terrain with unmanned aerial systems (UAS): Potential and limitations. Cryosphere Discuss. 2016, 1–36. [Google Scholar] [CrossRef]
- Harder, P.; Schirmer, M.; Pomeroy, J.; Helgason, W. Accuracy of snow depth estimation in mountain and prairie environments by an unmanned aerial vehicle. Cryosphere 2016, 10, 2559–2571. [Google Scholar] [CrossRef] [Green Version]
- Bühler, Y.; Adams, M.S.; Stoffel, A.; Boesch, R. Photogrammetric reconstruction of homogenous snow surfaces in alpine terrain applying near-infrared UAS imagery. Int. J. Remote Sens. 2017, 38, 3135–3158. [Google Scholar] [CrossRef]
- Cimoli, E.; Marcer, M.; Vandecrux, B.; Bøggild, C.E.; Williams, G.; Simonsen, S.B. Application of Low-Cost UASs and Digital Photogrammetry for High-Resolution Snow Depth Mapping in the Arctic. Remote Sens. 2017, 9, 1144. [Google Scholar] [CrossRef]
- Metcalfe, R.A.; Buttle, J.M. A statistical model of spatially distributed snowmelt rates in a boreal forest basin. Hydrol. Process. 1998, 12, 1701–1722. [Google Scholar] [CrossRef]
- Hedstrom, N.R.; Pomeroy, J.W. Measurements and modelling of snow interception in the boreal forest. Hydrol. Process. 1998, 12, 1611–1625. [Google Scholar] [CrossRef]
- Jonckheere, I.; Fleck, S.; Nackaerts, K.; Muys, B.; Coppin, P.; Weiss, M.; Baret, F. Review of methods for in situ leaf area index determination. Agric. For. Meteorol. 2004, 121, 19–35. [Google Scholar] [CrossRef]
- Manninen, T.; Korhonen, L.; Voipio, P.; Lahtinen, P.; Stenberg, P. Airborne estimation of boreal forest LAI in winter conditions: A test using summer and winter ground truth. IEEE Trans. Geosci. Remote Sens. 2012, 50, 68–74. [Google Scholar] [CrossRef]
- Roubínek, J.; Moeser, D.; Pavlásek, J.; Jonas, T. Linking Snow Distribution and Forest Canopy Characteristics by Way of Hemi-Spherical Photography. Available online: http://arc.lib.montana.edu/snow-science/objects/ISSW13_paper_O4-26.pdf (accessed on 28 February 2019).
- Miřijovský, J.; Langhammer, J. Multitemporal Monitoring of the Morphodynamics of a Mid-Mountain Stream Using UAS Photogrammetry. Remote Sens. 2015, 7, 8586–8609. [Google Scholar] [CrossRef] [Green Version]
- Agisoft PhotoScan User Manual. Available online: http://www.agisoft.com/pdf/photoscan-pro_1_2_en.pdf (accessed on 14 March 2016).
- Verhoeven, G. Taking computer vision aloft - archaeological three-dimensional reconstructions from aerial photographs with photoscan. Archaeol. Prospect. 2011, 18, 67–73. [Google Scholar] [CrossRef]
- Koutsoudis, A.; Vidmar, B.; Ioannakis, G.; Arnaoutoglou, F.; Pavlidis, G.; Chamzas, C. Multi-image 3D reconstruction data evaluation. J. Cult. Herit. 2014, 15, 73–79. [Google Scholar] [CrossRef]
- CloudCompare. Available online: http://www.cloudcompare.org/ (accessed on 10 July 2018).
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Jain, A.K. Data clustering: 50 years beyond K-means. Pattern Recognit. Lett. 2010, 8, 651–666. [Google Scholar] [CrossRef]
- ESRI ArcGIS Desktop: Release 10.4 Redlands, CA: Environmental Systems Research Instiute. Available online: http://www.esri.com (accessed on 18 January 2017).
- Jenicek, M.; Hotovy, O.; Matejka, O. Snow accumulation and ablation in different canopy structures at a plot scale: Using degree-day approach and measured shortwave radiation. AUC Geogr. 2017, 52, 61–72. [Google Scholar] [CrossRef]
- Jenicek, M.; Pevna, H.; Matejka, O. Snow accumulation and ablation in three forested mountain catchments. Acta Hydrol. Slovaca 2015, 16, 208–216. [Google Scholar]
- Danner, M.; Locherer, M.; Hank, T.; Richter, K. Measuring Leaf Area Index (LAI) with the LI-Cor LAI 2200C or LAI-2200 (+2200Clear Kit). Available online: http://gfzpublic.gfz-potsdam.de/pubman/item/escidoc:1381850/component/escidoc:1388296/EnMAP_FieldGuide_LAI_2015_009.pdf (accessed on 28 February 2019).
- Morsdorf, F.; Kötz, B.; Meier, E.; Itten, K.I.; Allgöwer, B. Estimation of LAI and fractional cover from small footprint airborne laser scanning data based on gap fraction. Remote Sens. Environ. 2006, 104, 50–61. [Google Scholar] [CrossRef]
- Persson, S. Estimating Leaf Area Index from Satellite Data in Deciduous Forests of Southern Sweden. Master’s Thesis, LUND UNIVERSITY, Lund, Sweden, 2014. [Google Scholar]
- Kundela, A. Leaf Area Index Estimation and Radiation Interception Measurements in Chinese Subtropical Forests: Assessment of Methods in Heterogeneous Topography. Available online: http://www.uwinst.uzh.ch/publications/Andreas_Kundela.pdf (accessed on 28 February 2019).
- Manninen, T.; Korhonen, L.; Voipio, P.; Lahtinen, P.; Stenberg, P. Leaf area index (LAI) estimation of boreal forest using wide optics airborne winter photos. Remote Sens. 2009, 1, 1380–1394. [Google Scholar] [CrossRef]
- Cutini, A.; Matteucci, G.; Mugnozza, G.S. Estimation of leaf area index with the Li-Cor LAI 2000 in deciduous forests. For. Ecol. Manag. 1998, 105, 55–65. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, J.M.; Miller, J.R. Determining digital hemispherical photograph exposure for leaf area index estimation. Agric. For. Meteorol. 2005, 133, 166–181. [Google Scholar] [CrossRef]
- Frazer, G.W.; Canham, C.D.; Lertzman, K.P. Gap Light Analyzer (GLA), Version 2.0: Imaging Software to Extract Canopy Structure and Gap Light Transmission Indices from True-Colour Fisheye Photographs, Users Manual and Program Documentation; Simon Fraser University: Burnaby, BC, Canada; The Institute of Ecosystem Studies: Millbrook, NY, USA, 1999; Volume 36. [Google Scholar]
- Frazer, G.; Trofymow, J.; Lertzman, K. A Method for Estimating Canopy Openess, Effective Leaf Area Index and Hotosynthetically Active Photon Flux Density Using Hemispherical Photography and Computerized Image Analysis Techniques; Technic Report; Information Report BC-X-373, Natural Resources Canada; Canadian Forest Service, Pacific Forestry Centre: Victoria, BC, Canada, 1997; p. 68. [Google Scholar]
- Lendzioch, T.; Langhammer, J.; Jenicek, M. Tracking forest and open area effects on snow accumulation by unmanned aerial vehicle photogrammetry. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2016, 917–923. [Google Scholar] [CrossRef]
- Puntanen, S. Linear Regression Analysis: Theory and Computing by Xin Yan, Xiao Gang Su. Int. Stat. Rev. 2010, 78, 144. [Google Scholar] [CrossRef]
- Pomeroy, J.; Fang, X.; Ellis, C. Sensitivity of snowmelt hydrology in Marmot Creek, Alberta, to forest cover disturbance. Hydrol. Process. 2012, 26, 1891–1904. [Google Scholar] [CrossRef]
- Vander Jagt, B.; Lucieer, A.; Wallace, L.; Turner, D.; Durand, M. Snow depth retrieval with UAS using photogrammetrytechniques. Geosiences 2015, 5, 264–285. [Google Scholar] [CrossRef]
- De Michele, C.; Avanzi, F.; Passoni, D.; Barzaghi, R.; Pinto, L.; Dosso, P.; Ghezzi, A.; Gianatti, R.; Vedova, G.D. Using a fixed-wing UAS to map snow depth distribution: An evaluation at peak accumulation. Cryosphere 2016, 10, 511–522. [Google Scholar] [CrossRef]
- Boesch, R.; Bühler, Y.; Marty, M.; Ginzler, C. Comparison of digital surface models for snow depth mapping with UAV and aerial cameras. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2016, 8. [Google Scholar] [CrossRef]
- Matějková, I.; van Diggelen, R.; Prach, K.; Marrs, R.H. An attempt to restore a central European species-rich mountain grassland through grazing. Appl. Veg. Sci. 2003, 6, 161–168. [Google Scholar] [CrossRef]
- Fernandes, R.; Prevost, C.; Canisius, F.; Leblanc, S.G.; Maloley, M.; Oakes, S.; Holman, K.; Knudby, A. Monitoring snow depth change across a range of landscapes with ephemeral snowpacks using structure from motion applied to lightweight unmanned aerial vehicle videos. Cryosphere 2018, 12, 3535–3550. [Google Scholar] [CrossRef]
- Jost, G.; Dan Moore, R.; Smith, R.; Gluns, D.R. Distributed temperature-index snowmelt modelling for forested catchments. J. Hydrol. 2012, 420–421, 87–101. [Google Scholar] [CrossRef]
- Zheng, G.; Moskal, L.M. Retrieving Leaf Area Index (LAI) Using Remote Sensing: Theories, Methods and Sensors. Sensors 2009, 9, 2719–2745. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Link, T.E.; Marks, D. Point simulation of seasonal snow cover dynamics beneath boreal forest canopies. J. Geophys. Res. Atmos. 1999, 104, 27841–27857. [Google Scholar] [CrossRef] [Green Version]
- Barry, R.; Prévost, M.; Stein, J.; Plamondon, A.P. Application of a snow cover energy and mass balance model in a balsam fir forest. Water Resour. Res. 1990, 26, 1079–1092. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV Details | |
| UAV type | ARF-OktoXL |
| Dimension | 73 × 73 × 36 |
| Payload | 2500 g |
| Gimbal | MK HiSight SLR2 |
| Max altitude | 100 m |
| Max distance | 100 m |
| Flight time | Max. 45 min |
| Realistic flight time | 15–28 min |
| Navigation | NaviCtrl V2.1 (IMU, barometer, GPS controller), MK-GNSS V4 GPS receiver (American GPS satellites, the European Galileo system, the Russian Glonass satellite or the Chinese BeiDou satellite system) |
| Wireless communication | Graupner MC-32 HoTT remote controller |
| LiPo battery | Vislero 5000, 14.8V 4S1P Flat |
| Camera Details | |
| Camera type | Lumix DMX-GX7 |
| Sensor type | 16MP Live MOS sensor |
| Sensor size (mm) | 17.3 × 13.0 mm (in 4:3 aspect ratio) |
| Focal length | 20 mm |
| Sensor resolution (MP) | 16 |
| ISO range | 125–25,600 |
| Weight (g) | 402 (g) |
| Input Parameter GLA | Value |
|---|---|
| Cloudiness index | 0.5 |
| Spectral fraction (0.25–25 μm) | 1 |
| Beam fraction | 0.5 |
| Clear-sky transmission coefficient | 0.5 |
| Solar constant (Wm-2) | 1367 |
| Flight Campaign | Date | Images | Flight Height [m] | Covered Area [km2] | Mean Ground Resolution [cm/pix] | Number of GCPs | Number of CPs | X Error RMSE [m] | Y Error RMSE [m] | Z Error RMSE [m] | XY Error RMSE [m] | Total RMSE [m] |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Filipova Hut (open site; snow ablation) | 24.3. 2017 | 963 | 62.2 | 0.056 | 1.16 | 8 | 6 | 0.041 | 0.039 | 0.055 | 0.056 | 0.079 |
| Filipova Hut (snow-free) | 30.4. 2017 | 1130 | 72.8 | 0.036 | 1.98 | 9 | 6 | 0.066 | 0.035 | 0.036 | 0.075 | 0.084 |
| Ptaci brook (forest site; snow accumulation) | 3.3. 2017 | 906 | 40.3 | 0.012 | 0.73 | 4 | 5 | 0.030 | 0.037 | 0.059 | 0.047 | 0.076 |
| Ptaci brook (snow ablation) | 15.3. 2017 | 1024 | 46 | 0.014 | 0.84 | 5 | 5 | 0.041 | 0.050 | 0.026 | 0.065 | 0.067 |
| Ptaci brook (snow-free) | 30.4. 2017 | 564 | 60.7 | 0.015 | 1.12 | 5 | 4 | 0.046 | 0.030 | 0.056 | 0.055 | 0.078 |
| HGCP-HUAV (One Pixel-Base; z values) | Open Area (Snow Ablation) n = 14 | Forest (Snow Accumulation) n = 9 | Forest (Snow Ablation) n = 10 |
| Mean bias [m] | 0.22 | 0.21 | 0.29 |
| SD [m] | 0.11 | 0.19 | 0.19 |
| MAE [m] | 0.09 | 0.16 | 0.13 |
| RMSE [m] | 0.08 | 0.15 | 0.09 |
| HT-HUAV (Mean Value of 1 m Radius; z values) | Open Area (Snow Ablation) n = 105 | Forest (Snow Accumulation) n = 36 | Forest (Snow Ablation) n = 36 |
| Mean bias [m] | 0.08 | 0.14 | 0.14 |
| SD [m] | 0.14 | 0.29 | 0.27 |
| MAE [m] | 0.19 | 0.24 | 0.22 |
| RMSE [m] | 0.16 | 0.32 | 0.31 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lendzioch, T.; Langhammer, J.; Jenicek, M. Estimating Snow Depth and Leaf Area Index Based on UAV Digital Photogrammetry. Sensors 2019, 19, 1027. https://doi.org/10.3390/s19051027
Lendzioch T, Langhammer J, Jenicek M. Estimating Snow Depth and Leaf Area Index Based on UAV Digital Photogrammetry. Sensors. 2019; 19(5):1027. https://doi.org/10.3390/s19051027
Chicago/Turabian StyleLendzioch, Theodora, Jakub Langhammer, and Michal Jenicek. 2019. "Estimating Snow Depth and Leaf Area Index Based on UAV Digital Photogrammetry" Sensors 19, no. 5: 1027. https://doi.org/10.3390/s19051027
APA StyleLendzioch, T., Langhammer, J., & Jenicek, M. (2019). Estimating Snow Depth and Leaf Area Index Based on UAV Digital Photogrammetry. Sensors, 19(5), 1027. https://doi.org/10.3390/s19051027