Corrosion Monitoring Method of Porous Aluminum Alloy Plate Hole Edges Based on Piezoelectric Sensors



Abstract
:
1. Introduction
2. Background
2.1. Guided Wave in Aluminum Alloy
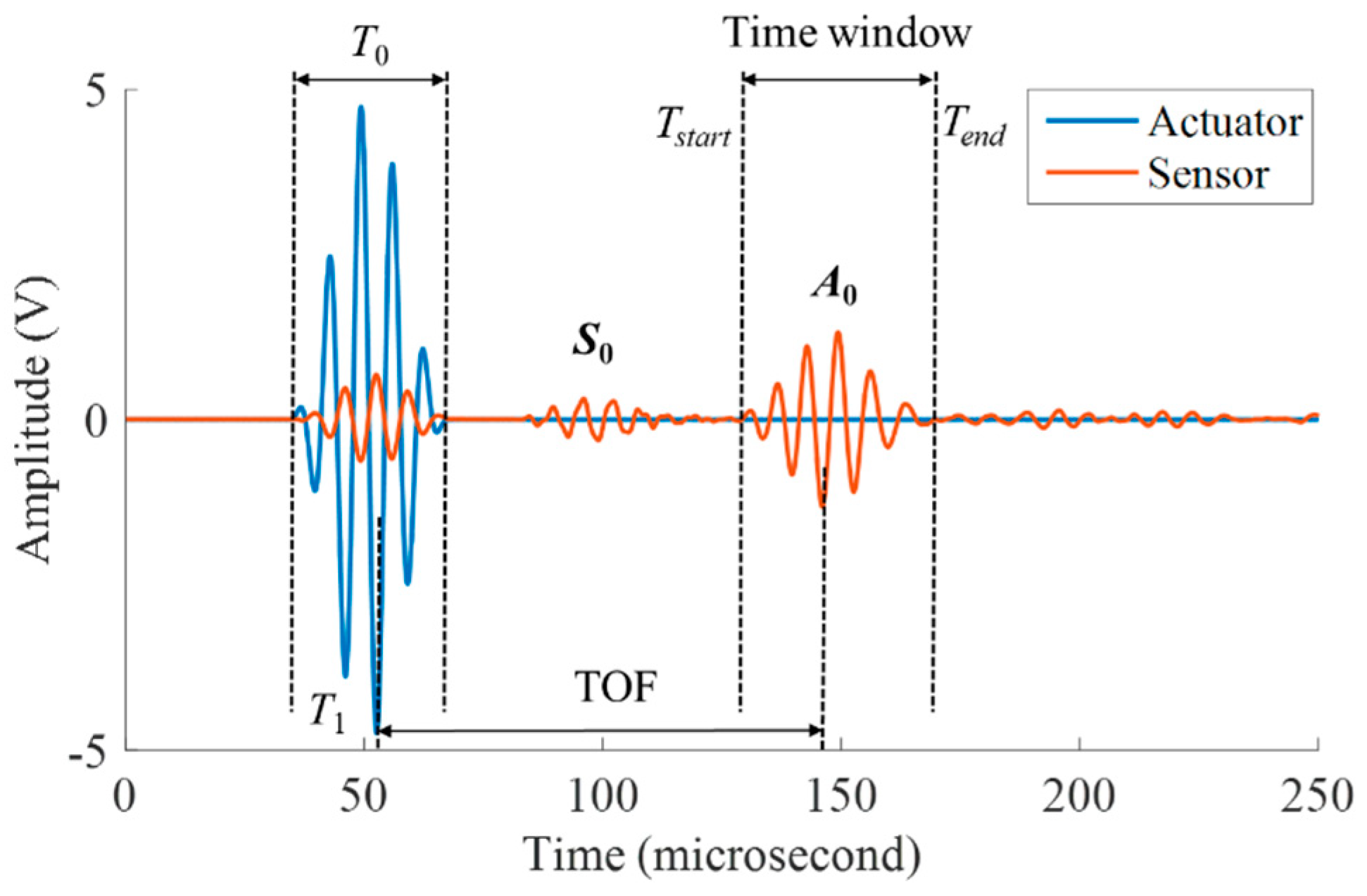
2.2. Selection of Damage Characteristic Parameters
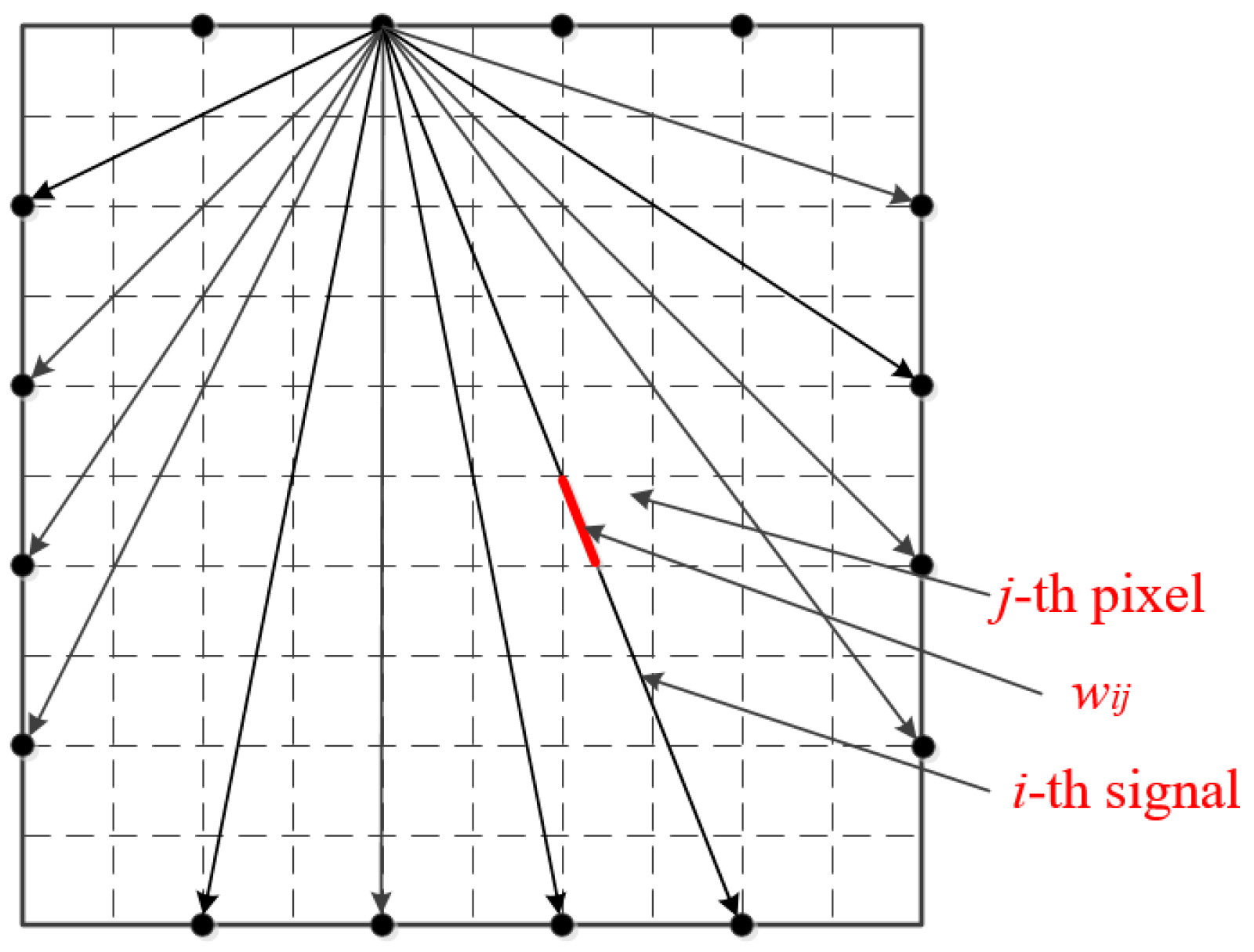
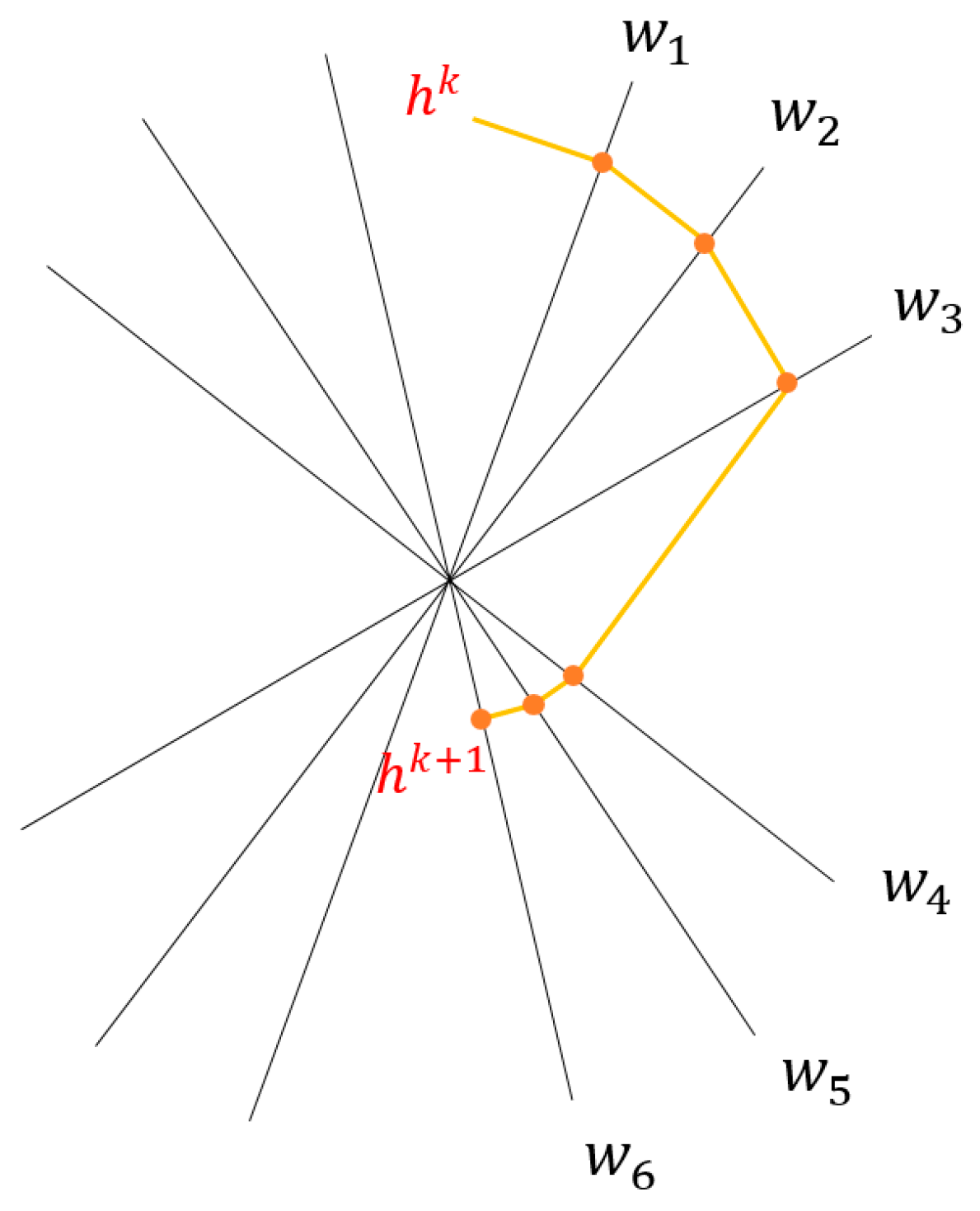
2.3. Proposed Data Processing Method
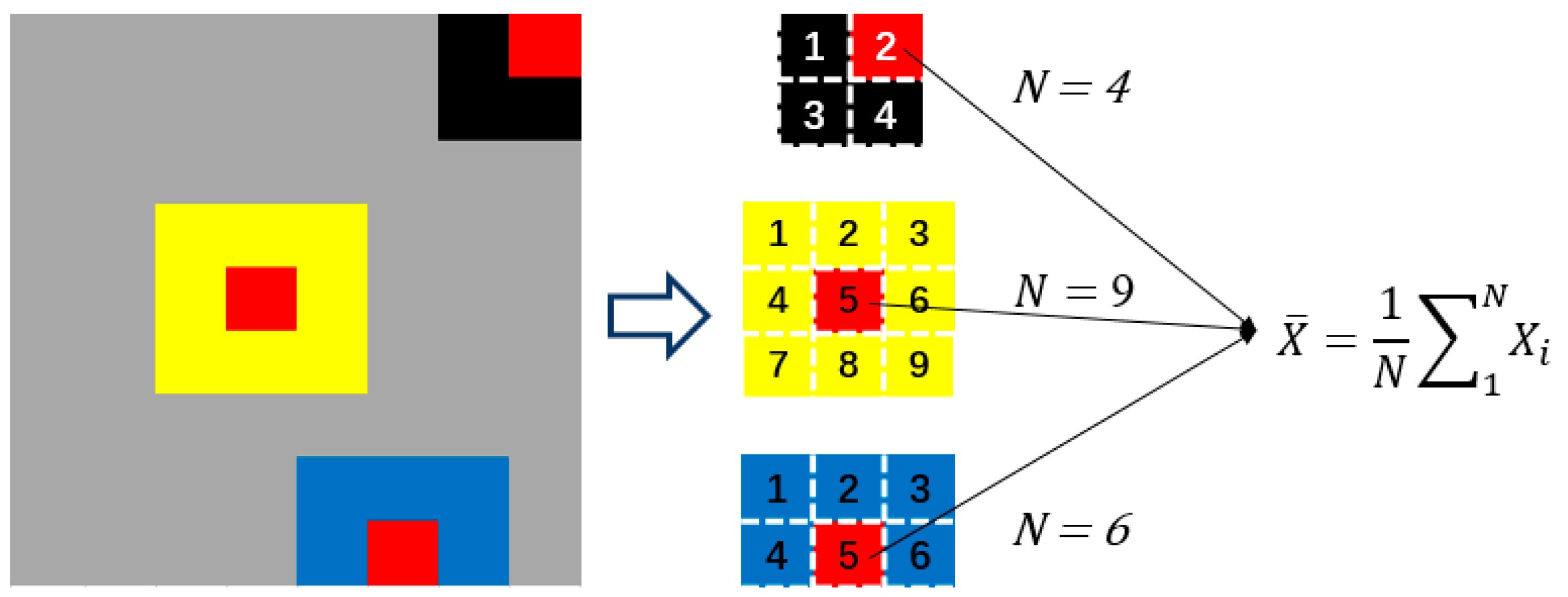
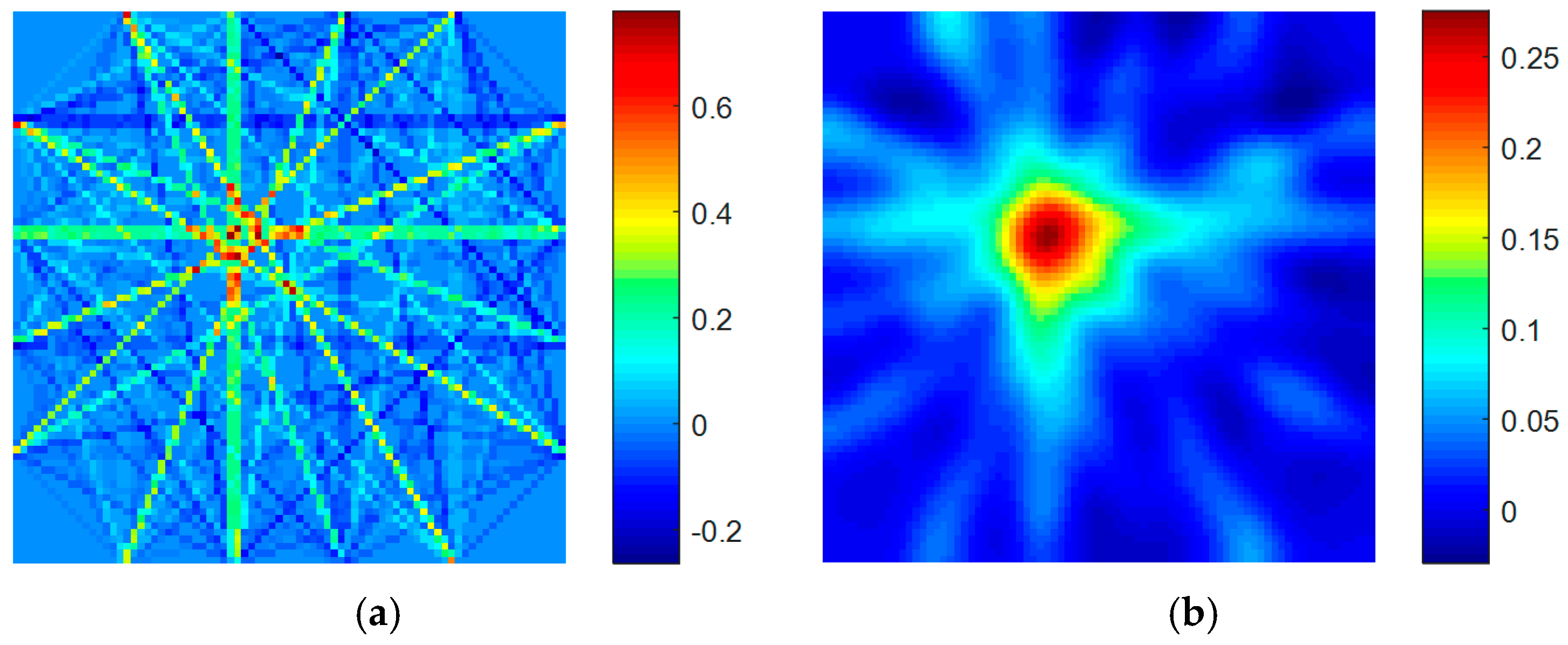
2.4. Proposed Homogenization Processing Method
3. Corrosion Tests
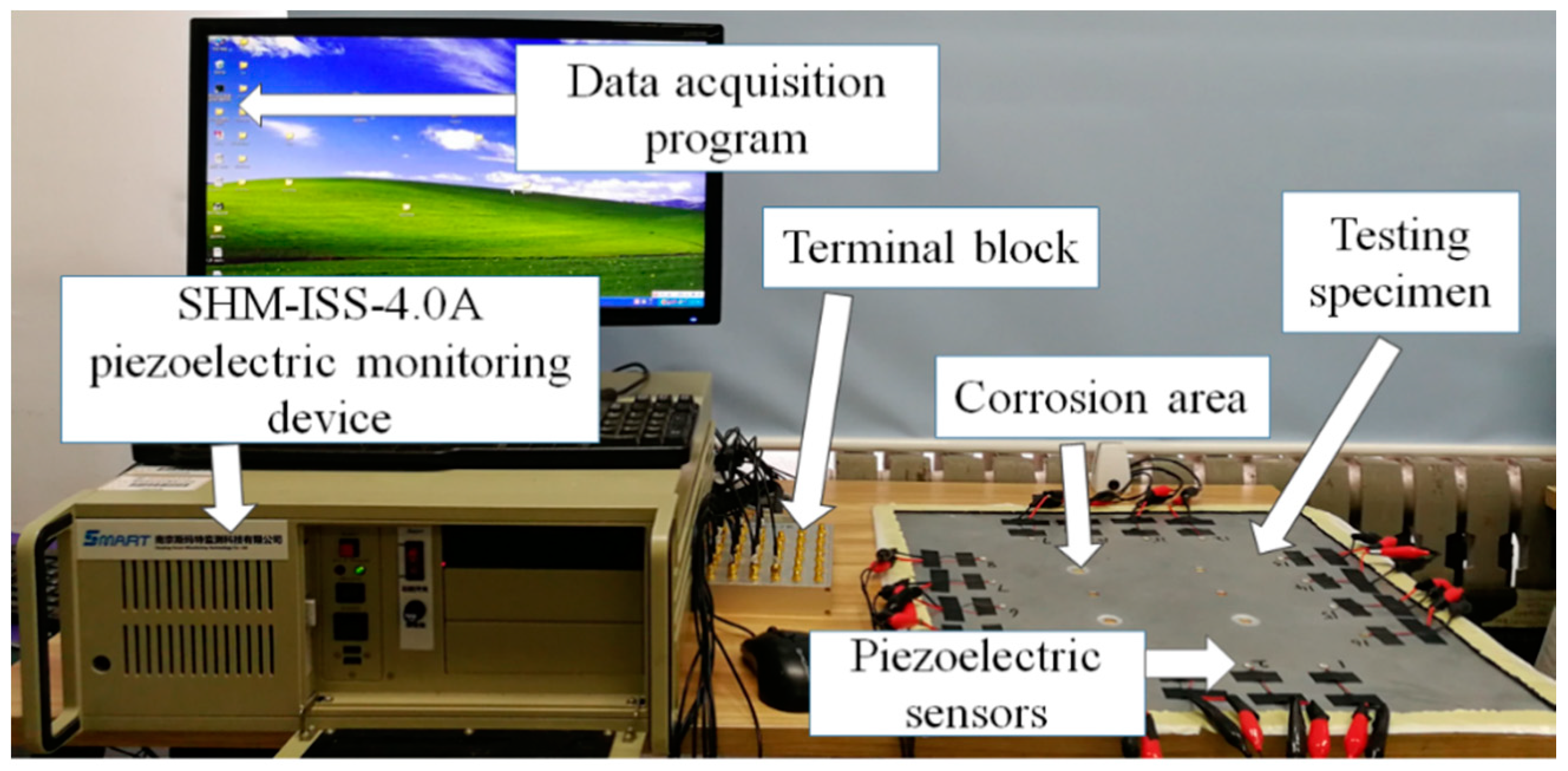
3.1. Experiment Equipment
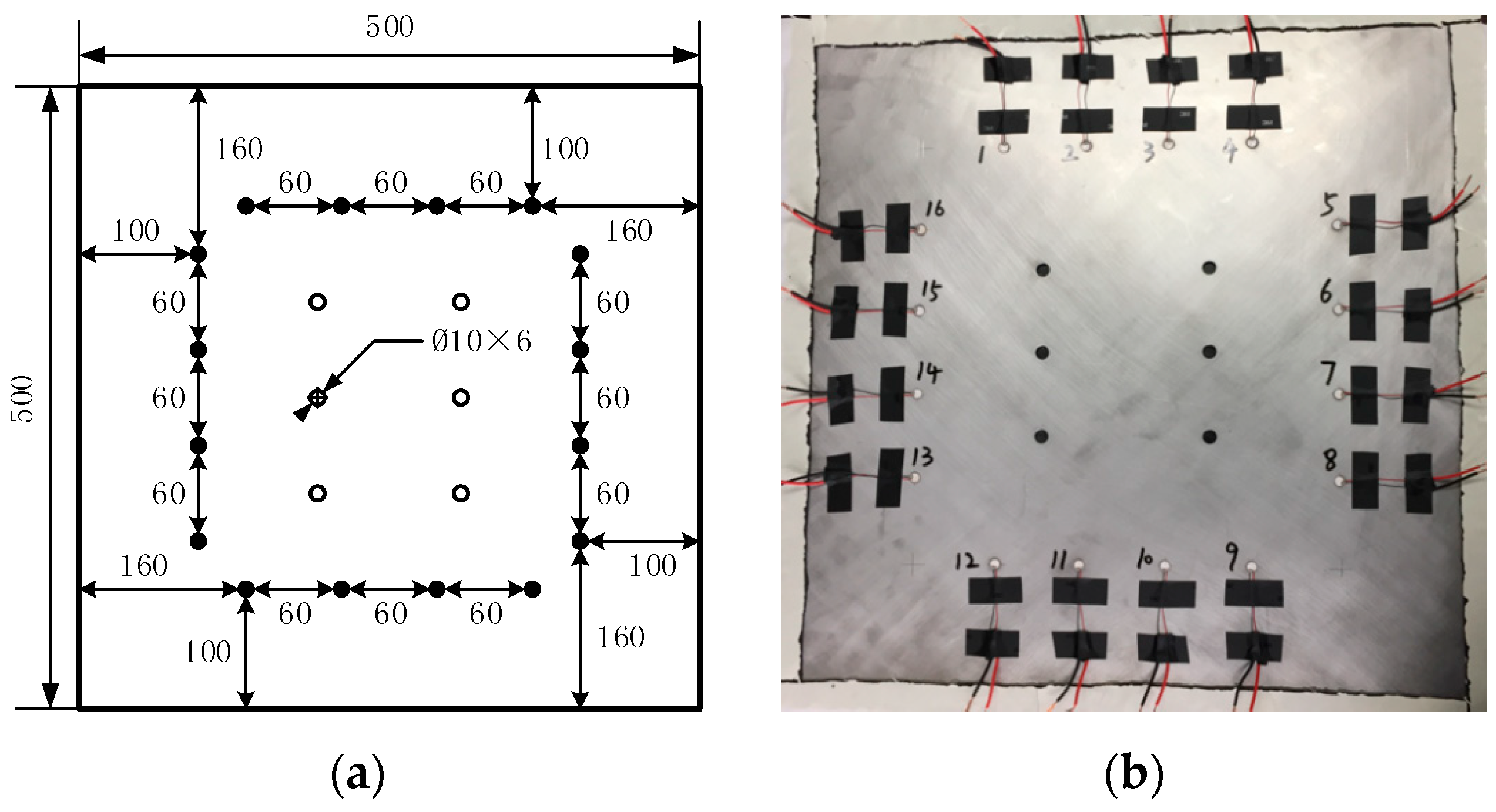
3.2. Test Plan Design
3.3. Corrosion Solution
3.4. Excitation Frequency Design
4. Results and Discussion
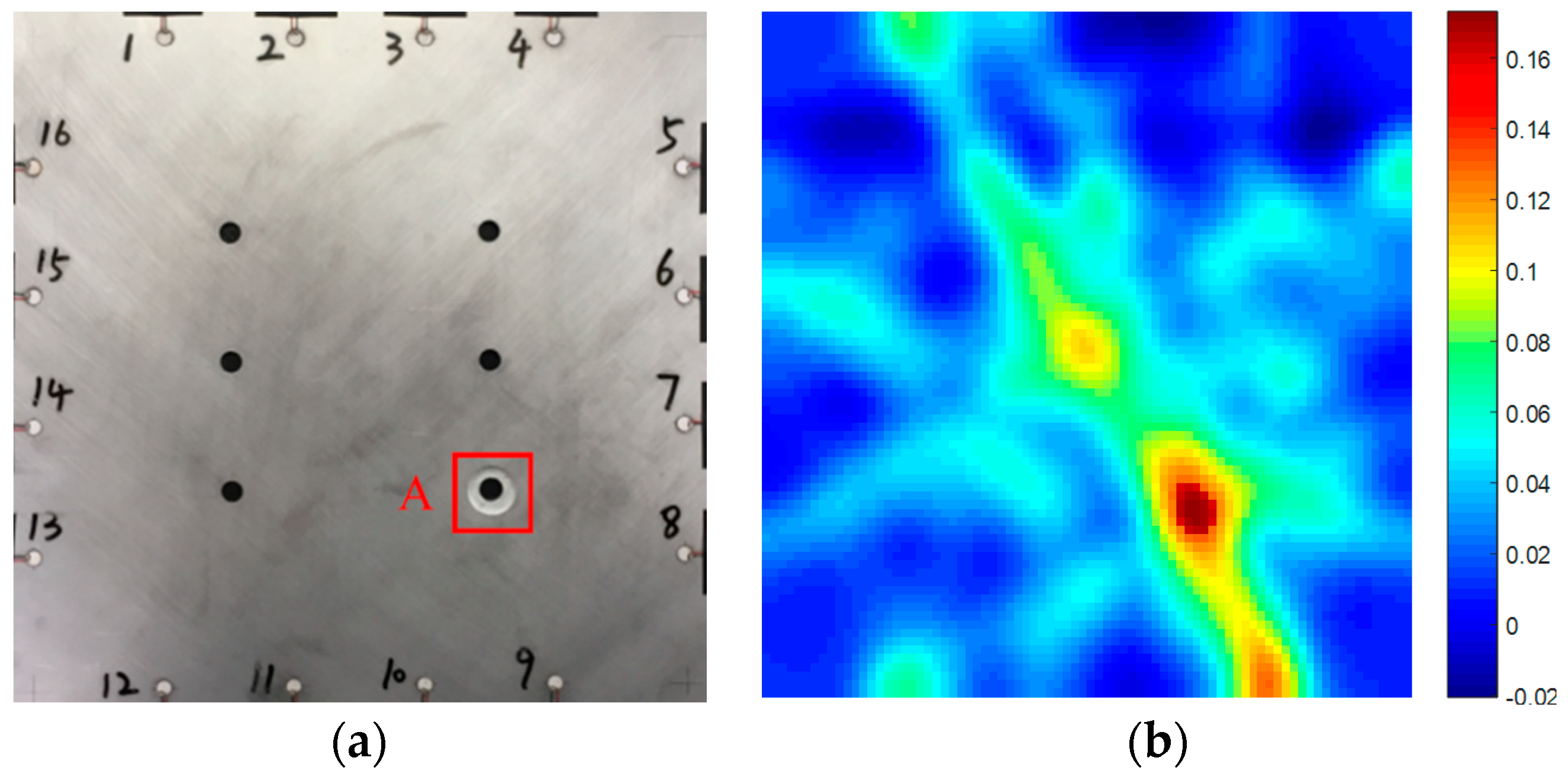
4.1. Case 1
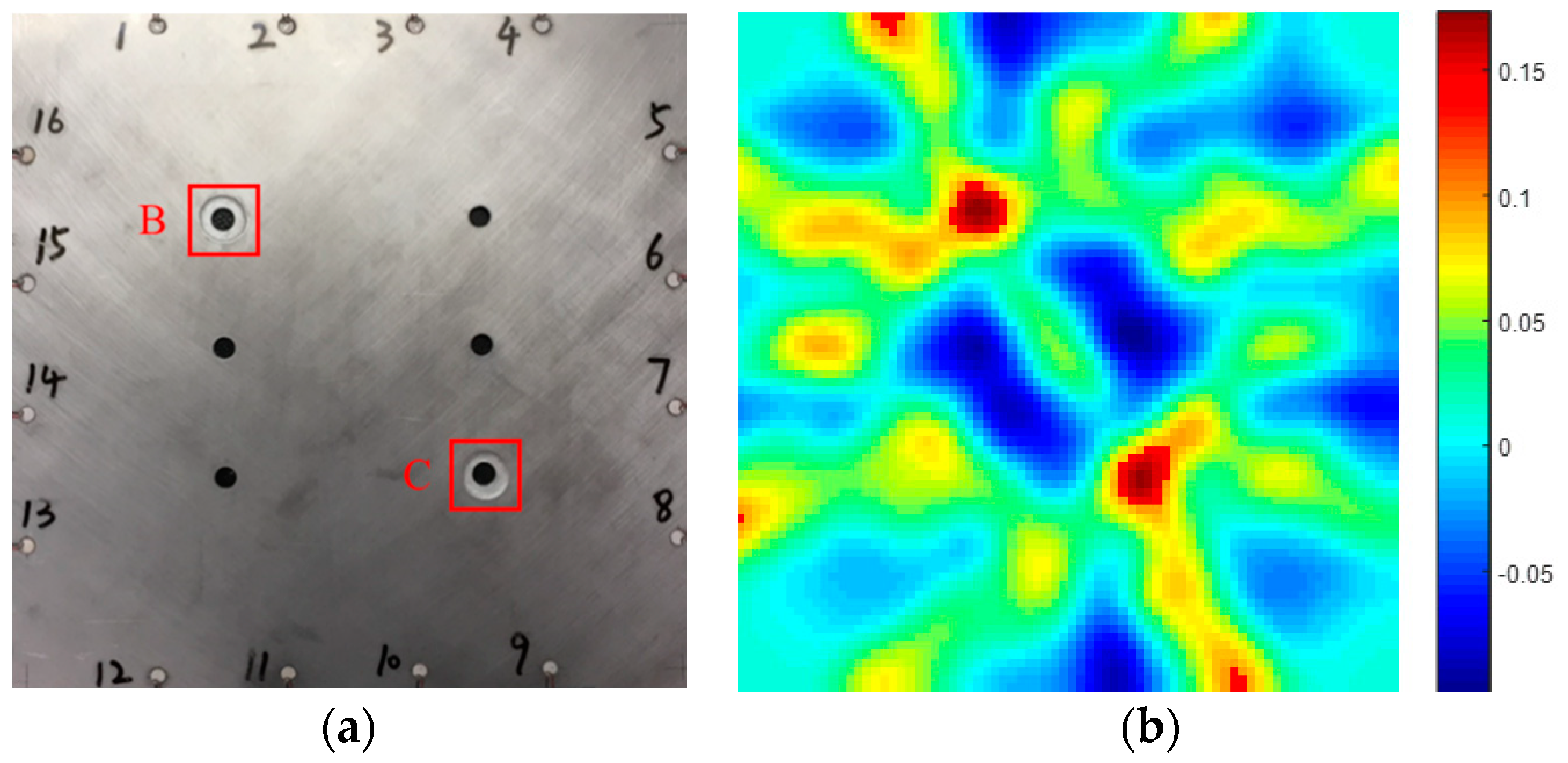
4.2. Case 2
5. Conclusion
Author Contributions
Funding
Conflicts of Interest
References
- Gerengi, H.; Bereket, G.; Kurtay, M. A morphological and electrochemical comparison of the corrosion process of aluminum alloys under simulated acid rain conditions. J. Taiwan Inst. Chem. Eng. 2016, 58, 509–516. [Google Scholar] [CrossRef]
- Yu, L.; Giurgiutiu, V.; Wang, J.; Shin, Y.J. Corrosion detection with piezoelectric wafer active sensors using pitch-catch waves and cross-time-frequency analysis. Struct. Health Monit. 2012, 11, 83–93. [Google Scholar] [CrossRef]
- Dalton, R.P.; Cawley, P.; Lowe, M.J.S. The potential of guided waves for monitoring large areas of metallic aircraft fuselage structure. J. Nondestruct. Eval. 2001, 20, 29–46. [Google Scholar] [CrossRef]
- Huang, I.-W.; Hurley, B.L.; Yang, F.; Buchheit, R.G. Dependence on Temperature, pH, and Cl− in the Uniform Corrosion of Aluminum Alloys 2024-T3, 6061-T6, and 7075-T6. Electrochim. Acta 2016, 199, 242–253. [Google Scholar] [CrossRef]
- Davis, J.R. Corrosion of Aluminum and Aluminum Alloys; ASM International: Materials Park, OH, USA, 1999; ISBN 161503238X. [Google Scholar]
- Giridhara, G.; Rathod, V.T.; Naik, S.; Mahapatra, D.R.; Gopalakrishnan, S. Rapid localization of damage using a circular sensor array and Lamb wave based triangulation. Mech. Syst. Signal Process. 2010, 24, 2929–2946. [Google Scholar] [CrossRef]
- Thomas, D.; Welter, J.; Guirguitiu, V. Corrosion Damage Detection with Piezoelectric Wafer Active Sensors. In Health Monitoring and Smart Nondestructive Evaluation of Structural and Biological Systems III; International Society for Optics and Photonics: San Diego, CA, USA, 2004; Volume 5394, pp. 11–22. [Google Scholar]
- Rathod, V.T.; Mahapatra, D.R. NDT & E International Ultrasonic Lamb wave based monitoring of corrosion type of damage in plate using a circular array of piezoelectric transducers. NDT E Int. 2011, 44, 628–636. [Google Scholar]
- Belkerdid, M.A.; Kozlovski, N.Y.; Haines, D.M.; Struble, E. Wireless Surface Acoustic Wave Corrosion Sensor and Interrogation System for Concrete Structures. U.S. Patent No. 9,063,058, 23 June 2015. [Google Scholar]
- Mintz, T.S.; Caseres, L.; Bocher, F.; Dante, J. Development of Corrosion Sensor Technology for Buried Piping. In Proceedings of the CORROSION 2015, Graz, Austria, 6–10 September 2015; NACE International: Houston, TX, USA, 2015. [Google Scholar]
- Wilson, W.C.; Gary, M.A. Passive wireless sensor applications for NASA’s extreme aeronautical environments. IEEE Sens. J. 2014, 14, 3745–3753. [Google Scholar] [CrossRef]
- Chen, Y.; Tang, F.; Bao, Y.; Tang, Y.; Chen, G. A Fe-C coated long-period fiber grating sensor for corrosion-induced mass loss measurement. Opt. Lett. 2016, 41, 2306–2309. [Google Scholar] [CrossRef] [PubMed]
- Aung, N.N.; Crowe, E.; Liu, X. Development of self-powered wireless high temperature electrochemical sensor for in situ corrosion monitoring of coal-fired power plant. ISA Trans. 2015, 55, 188–194. [Google Scholar] [CrossRef] [PubMed]
- Giurgiutiu, V. Structural Health Monitoring with Piezoelectric Wafer Active Sensors: With Piezoelectric Wafer Active Sensors; Elsevier: Amsterdam, The Netherlands, 2007; pp. 10–12. [Google Scholar]
- Talakokula, V.; Bhalla, S. Reinforcement corrosion assessment capability of surface bonded and embedded piezo sensors for reinforced concrete structures. J. Intell. Mater. Syst. Struct. 2014, 26, 2304–2313. [Google Scholar] [CrossRef]
- Visalakshi, T.; Bhalla, S.; Bhattacharjee, B. Detection and quantification of corrosion using electro-mechanical impedance (EMI) technique. Int. J. Earth Sci. Eng. 2011, 4, 889–891. [Google Scholar]
- Wang, W.; Bao, Y.; Zhou, W.; Li, H. Sparse representation for Lamb-wave-based damage detection using a dictionary algorithm. Ultrasonics 2018, 87, 48–58. [Google Scholar] [CrossRef] [PubMed]
- Sedaghati, A.; Honarvar, F.; Sinclair, A.N. Lamb wave-based experimental and numerical studies for detection and sizing of corrosion damage in metallic plates. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018. [Google Scholar] [CrossRef]
- Rao, J.; Ratassepp, M.; Lisevych, D.; Caffoor, M.H.; Fan, Z. On-line corrosion monitoring of plate structures based on guided wave tomography using piezoelectric sensors. Sensors 2017, 17, 2882. [Google Scholar] [CrossRef] [PubMed]
- Farkas, M.L. Principles of Computed Tomography. In Cross-Sectional Anatomy for Computed Tomography; Springer: Berlin/Heidelberg, Germany, 1988; pp. 3–9. [Google Scholar]
- Gordon, R.; Bender, R.; Herman, G.T. Algebraic Reconstruction Techniques (ART) for three-dimensional electron microscopy and X-ray photography. J. Theor. Biol. 1970, 29, 471–481. [Google Scholar] [CrossRef]
- Chen, J.; Su, Z.; Cheng, L. Identification of corrosion damage in submerged structures using fundamental anti-symmetric Lamb waves. Smart Mater. Struct. 2010, 19, 015004. [Google Scholar] [CrossRef]
- Jiang, B.; Zhao, W.; Wang, W. Improved Ultrasonic Computerized Tomography Method for STS (Steel Tube Slab) Structure Based on Compressive Sampling Algorithm. Appl. Sci. 2017, 7, 432. [Google Scholar] [CrossRef]
- Curadelli, R.O.; Riera, J.D.; Ambrosini, D.; Amani, M.G. Damage detection by means of structural damping identification. Eng. Struct. 2008, 30, 3497–3504. [Google Scholar] [CrossRef]
- Lozev, M.G.; Smith, R.W.; Grimmett, B. Evaluation of methods for detecting and monitoring of corrosion damage in risers. In Proceedings of the ASME 2003 22nd International Conference on Offshore Mechanics and Arctic Engineering; American Society of Mechanical Engineers: New York, NY, USA, 2003; pp. 363–374. [Google Scholar]
- Sohn, H.; Lee, S.J. Lamb wave tuning curve calibration for surface-bonded piezoelectric transducers. Smart Mater. Struct. 2009, 19, 15007. [Google Scholar] [CrossRef]
- Lin, B.; Giurgiutiu, V. Modeling and testing of PZT and PVDF piezoelectric wafer active sensors. Smart Mater. Struct. 2006, 15, 1085. [Google Scholar] [CrossRef]
- Fromme, P.; Wilcox, P.D.; Lowe, M.J.S.; Cawley, P. On the development and testing of a guided ultrasonic wave array for structural integrity monitoring. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2006, 53, 777–785. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mitra, M.; Gopalakrishnan, S. Guided wave based structural health monitoring: A review. Smart Mater. Struct. 2016, 25, 53001. [Google Scholar] [CrossRef]
- Kundu, T.; Das, S.; Jata, K. V Health monitoring of a thermal protection system using Lamb waves. Struct. Health Monit. 2009, 8, 29–45. [Google Scholar] [CrossRef]
- Wang, D.; Zhang, W.; Wang, X.; Sun, B. Lamb-Wave-Based Tomographic Imaging Techniques for Hole-Edge Corrosion Monitoring in Plate Structures. Materials 2016, 9, 916. [Google Scholar] [CrossRef] [PubMed]
- Zhao, C.; Hu, H.; Zhou, Y.; Gao, Y.; Ren, X.; Yang, Q. Experimental and numerical investigation of residual stresses around cold extrusion hole of ultrahigh strength steel. Mater. Des. 2013, 50, 78–84. [Google Scholar] [CrossRef]
- Liu, H.; Chen, X.; Michaels, J.E.; Michaels, T.E.; He, C. Incremental scattering of the A0 Lamb wave mode from a notch emanating from a through-hole. Ultrasonics 2019, 91, 220–230. [Google Scholar] [CrossRef] [PubMed]
- Jiao, J.; Meng, X.; He, C.; Bin, W. Nonlinear Lamb wave-mixing technique for micro-crack detection in plates. NDT E Int. 2017, 85, 63–71. [Google Scholar]
- Zhao, X.; Royer, R.L.; Owens, S.E.; Rose, J.L. Ultrasonic Lamb wave tomography in structural health monitoring. Smart Mater. Struct. 2011, 20, 105002. [Google Scholar] [CrossRef]
- Hu, B.; Hu, N.; Li, L.; Li, W.; Tang, S.; Li, Y.; Peng, X.; Homma, A.; Liu, Y.; Wu, L. Tomographic reconstruction of damage images in hollow cylinders using Lamb waves. Ultrasonics 2014, 54, 2015–2023. [Google Scholar] [CrossRef] [PubMed]
- Pau, A.; Achillopoulou, D.V. Interaction of shear and Rayleigh-Lamb waves with notches and voids in plate waveguides. Materials 2017, 10, 841. [Google Scholar] [CrossRef] [PubMed]
- He, J.; Guan, X.; Peng, T.; Liu, Y.; Saxena, A.; Celaya, J.; Goebel, K. A multi-feature integration method for fatigue crack detection and crack length estimation in riveted lap joints using Lamb waves. Smart Mater. Struct. 2013, 22, 105007. [Google Scholar] [CrossRef]
- Zhou, C.; Su, Z.; Cheng, L. Probability-based diagnostic imaging using hybrid features extracted from ultrasonic Lamb wave signals. Smart Mater. Struct. 2011, 20, 125005. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device Number | SHM-ISS-4.0A |
|---|---|
| Maximum Length of Excitation Signal | 40,000 data points |
| Vertical Accuracy | 14-bit |
| Maximum Output Voltage | ±50 V |
| Working Bandwidth | 10 kHz–500 kHz |
| Sampling Rate | 1 MHz–40 MHz |
| Sampling Accuracy | 12-bit |
| Signal Input Range | ±5 V |
| Molecular Formula | HF | |
| Content of HF | ≥40% | |
| Impurity Content (%) | Fe | ≤0.0001 |
| Cl | ≤0.001 | |
| PO4 | ≤0.0002 | |
| Heavy metal (Pb) | ≤0.0005 | |
| Fluorosilicate (SiF6) | ≤0.04 | |
| Others | ≤0.004 | |
| Damage Threshold | Actual Corrosion Area (unit is mm2) | Predicted Corrosion Area (unit is mm2) | Percentage Error | |
|---|---|---|---|---|
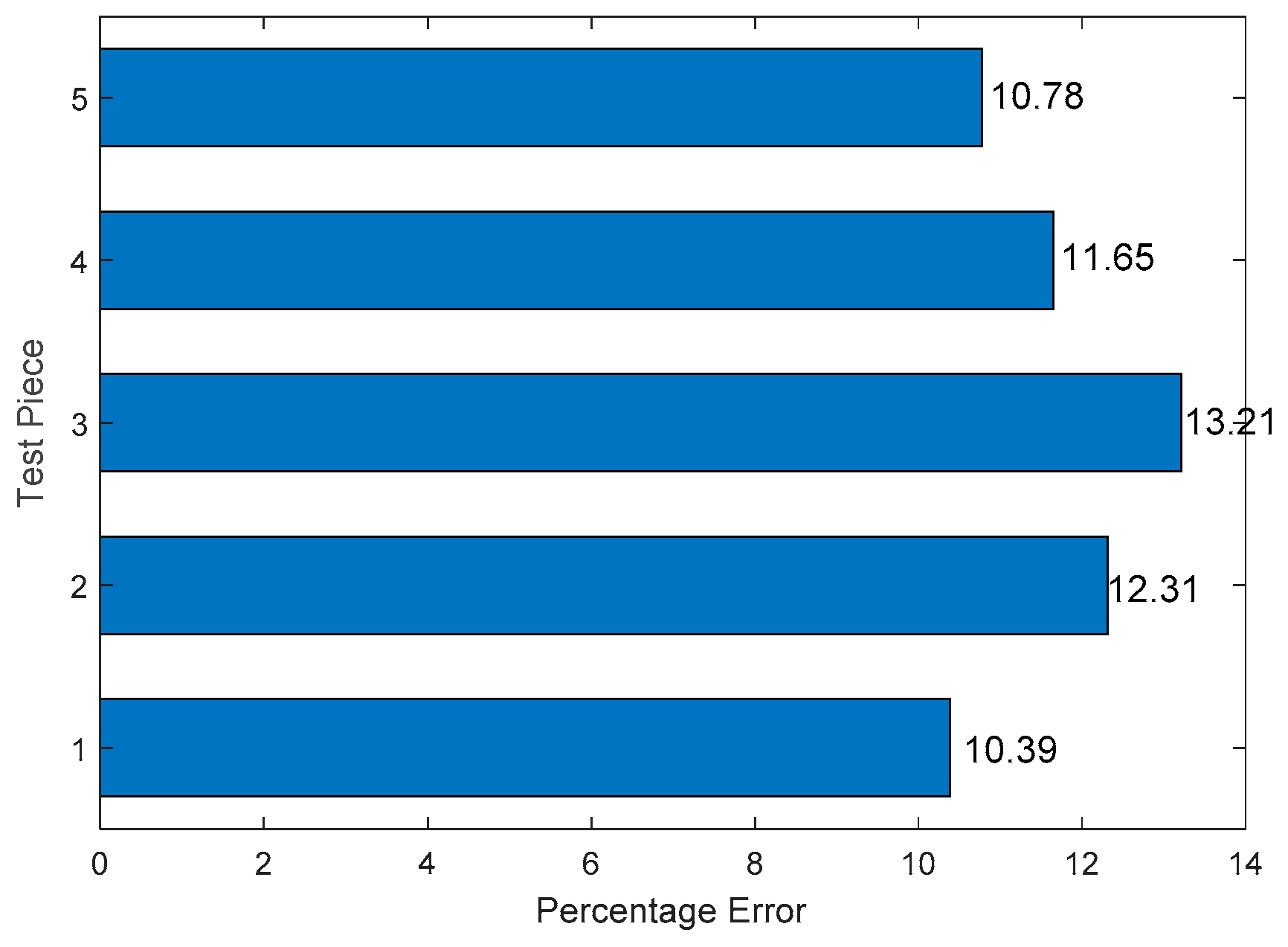
| Hole A | 0.15 | 273.06 | 301.44 | 10.39% |
| Damage Threshold | Actual Corrosion Area (unit is mm2) | Predicted Corrosion Area (unit is mm2) | Percentage Error | |
|---|---|---|---|---|
| Hole B | 0.15 | 273.06 | 329.31 | 20.60% |
| Hole C | 0.15 | 273.06 | 357.44 | 25.75% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, W.; Wang, X.; Zhang, M.; Zhang, W.; Wang, R. Corrosion Monitoring Method of Porous Aluminum Alloy Plate Hole Edges Based on Piezoelectric Sensors. Sensors 2019, 19, 1106. https://doi.org/10.3390/s19051106
Dai W, Wang X, Zhang M, Zhang W, Wang R. Corrosion Monitoring Method of Porous Aluminum Alloy Plate Hole Edges Based on Piezoelectric Sensors. Sensors. 2019; 19(5):1106. https://doi.org/10.3390/s19051106
Chicago/Turabian StyleDai, Wei, Xiangyu Wang, Meng Zhang, Weifang Zhang, and Rongqiao Wang. 2019. "Corrosion Monitoring Method of Porous Aluminum Alloy Plate Hole Edges Based on Piezoelectric Sensors" Sensors 19, no. 5: 1106. https://doi.org/10.3390/s19051106
APA StyleDai, W., Wang, X., Zhang, M., Zhang, W., & Wang, R. (2019). Corrosion Monitoring Method of Porous Aluminum Alloy Plate Hole Edges Based on Piezoelectric Sensors. Sensors, 19(5), 1106. https://doi.org/10.3390/s19051106