An Energy-Efficient Slotted Sense Multiple Access Broadcast Protocol for Reliable Command Delivery in Dynamic Wireless Sensor Networks


Abstract
:1. Introduction
2. Preliminaries
2.1. Network Model
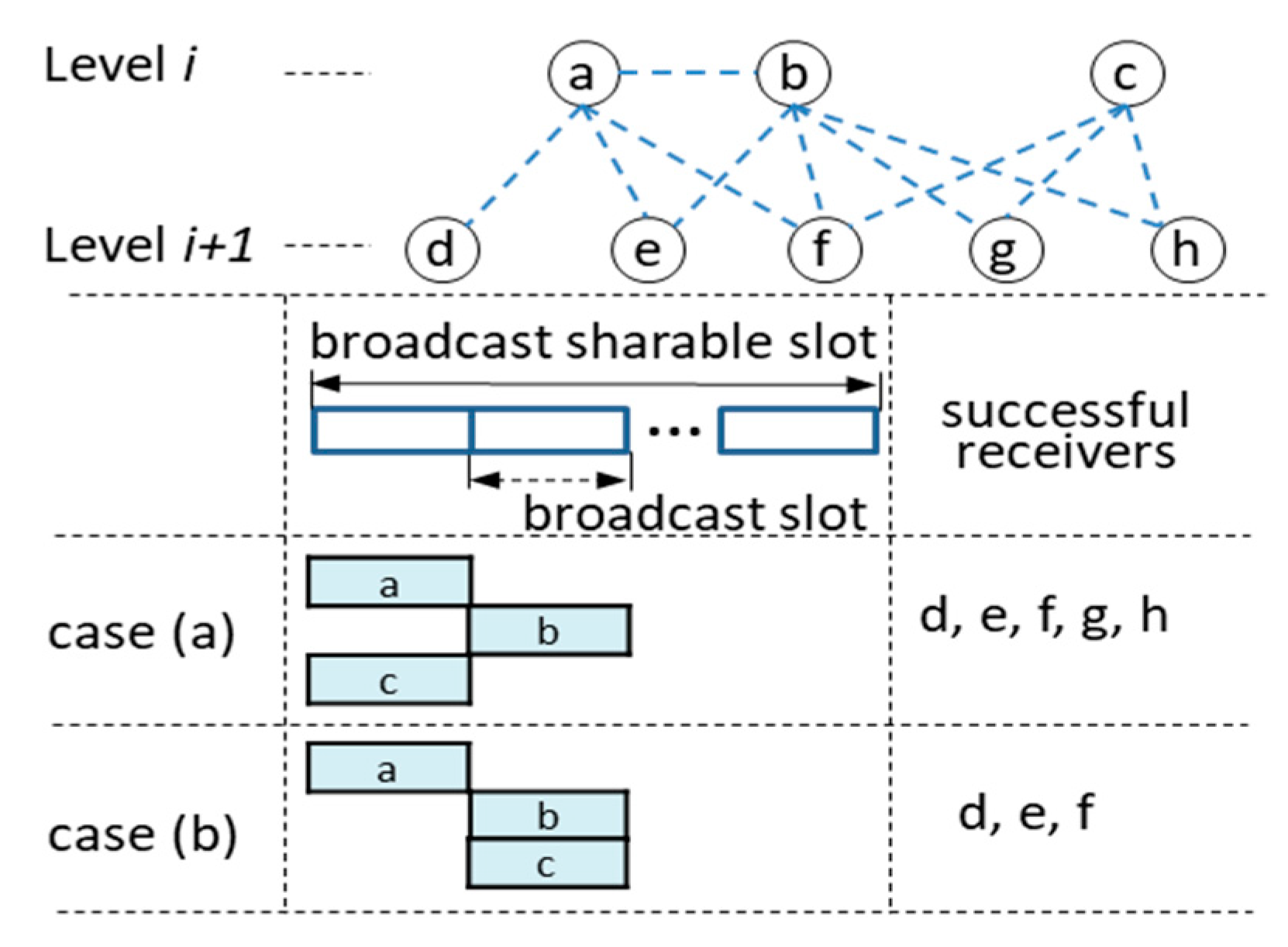
2.2. Motivation
3. SSMA Broadcast Protocol
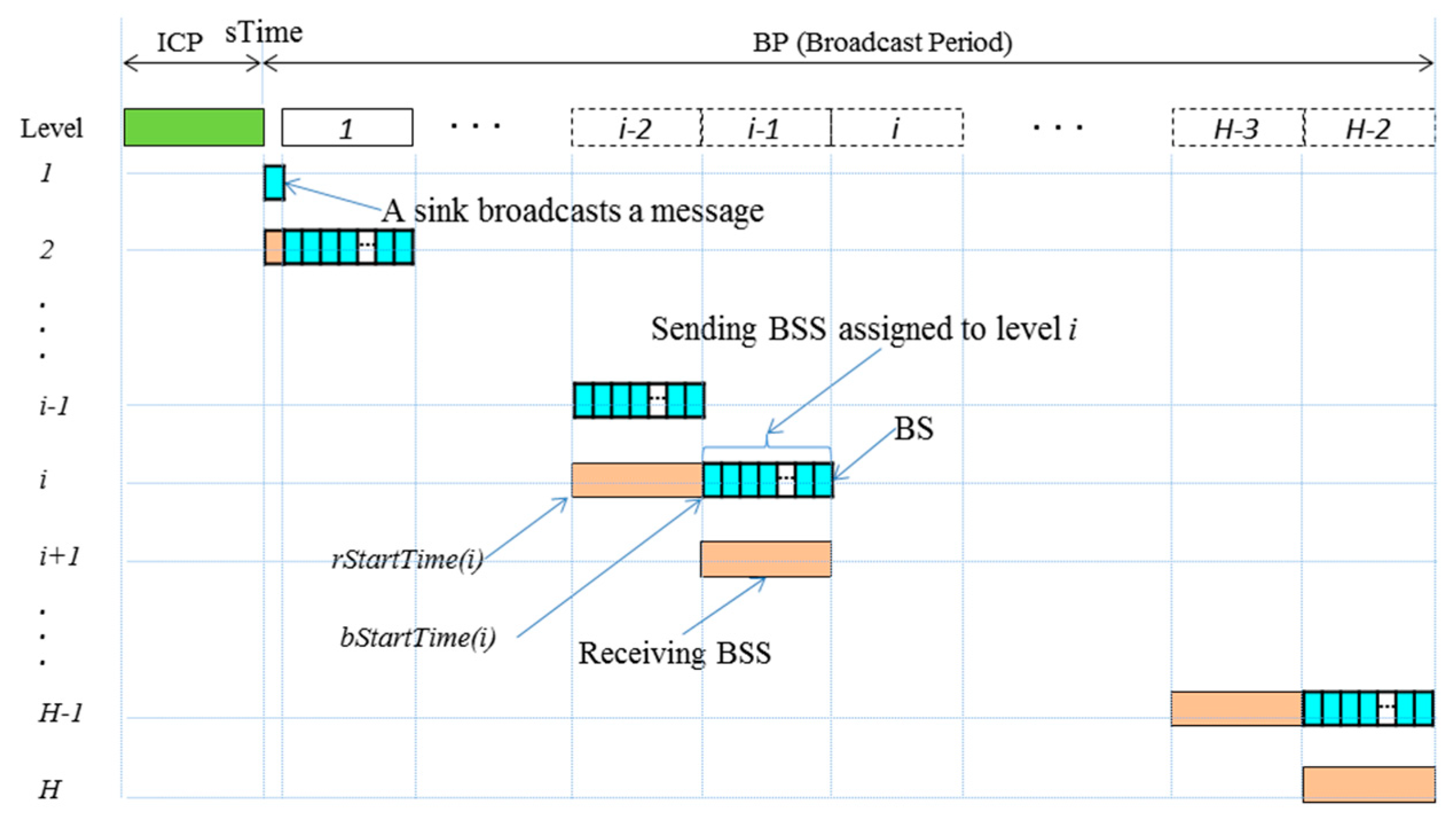
3.1. Protocol Structure
3.2. BSS Scheduling
3.3. Broadcast Approaches
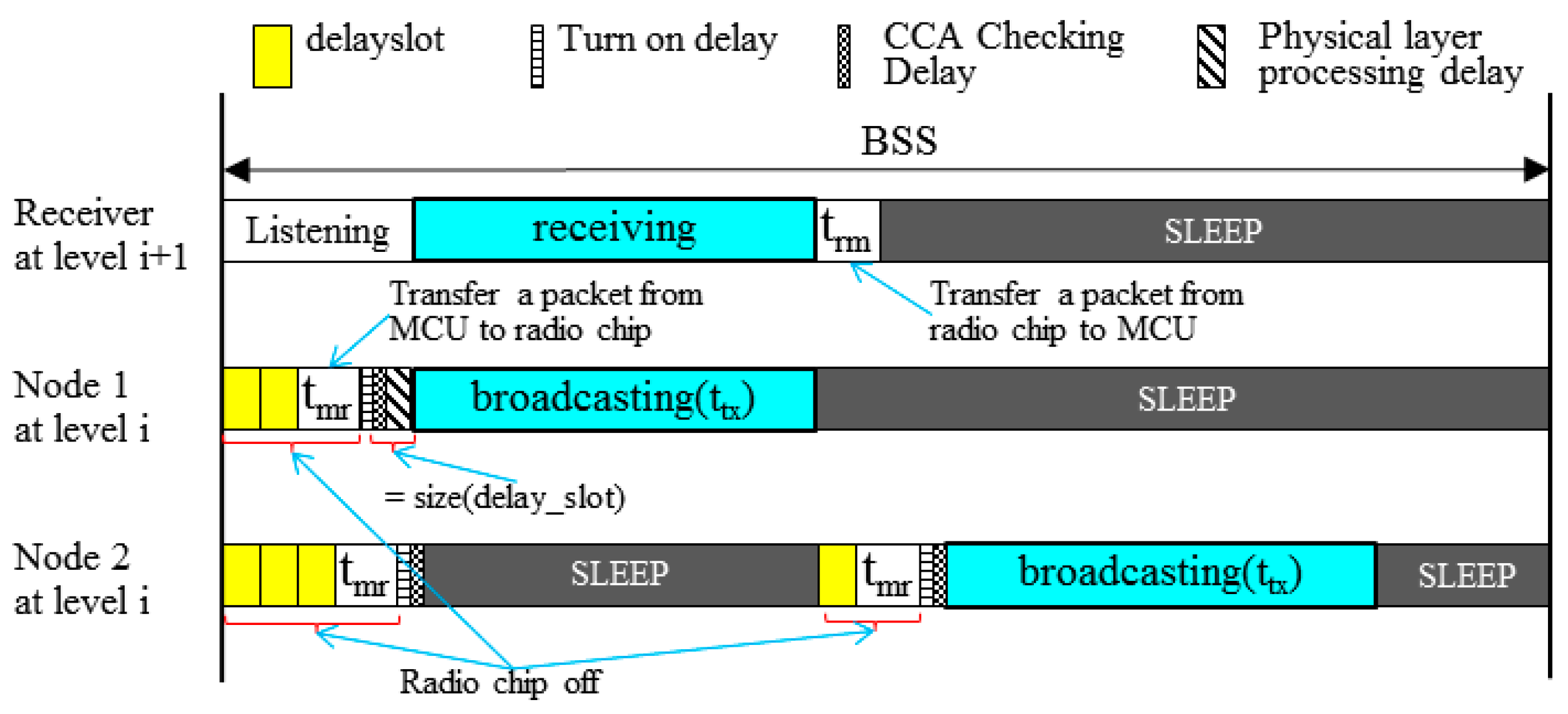
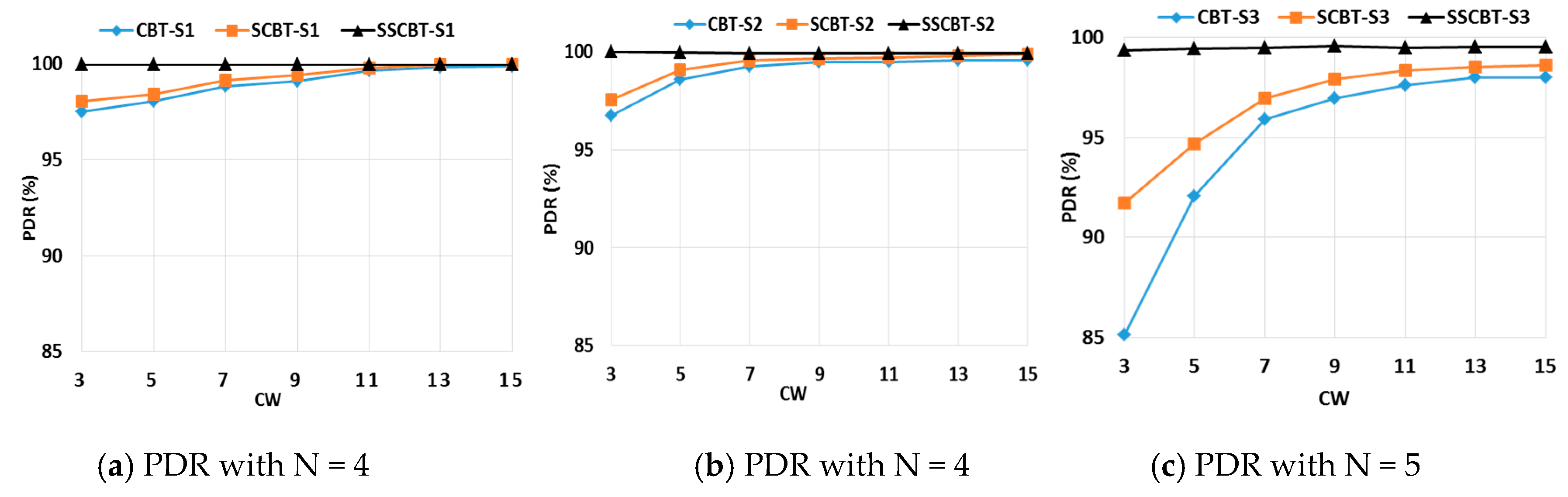
3.3.1. Contention-Based Transmission
3.3.2. Slotted Contention-Based Transmission
3.3.3. Slot-Scheduled Contention-Based Transmission
| Algorithm 1 A broadcast slot (BS) scheduling algorithm |
| //N = the number of BSs to be scheduled |
| //m = the number of children |
| //BSN(i) = the BS number assigned to node i |
| If i is a sink then |
| If i is an intermediate node then |
3.4. Discussion on Key Protocol Parameter
3.4.1. The Lower Bound of BS
3.4.2. The Lower Bound of BSS
3.4.3. The Lower Bound of BP
3.5. SSMAb Characteristics
4. Performance Evaluation
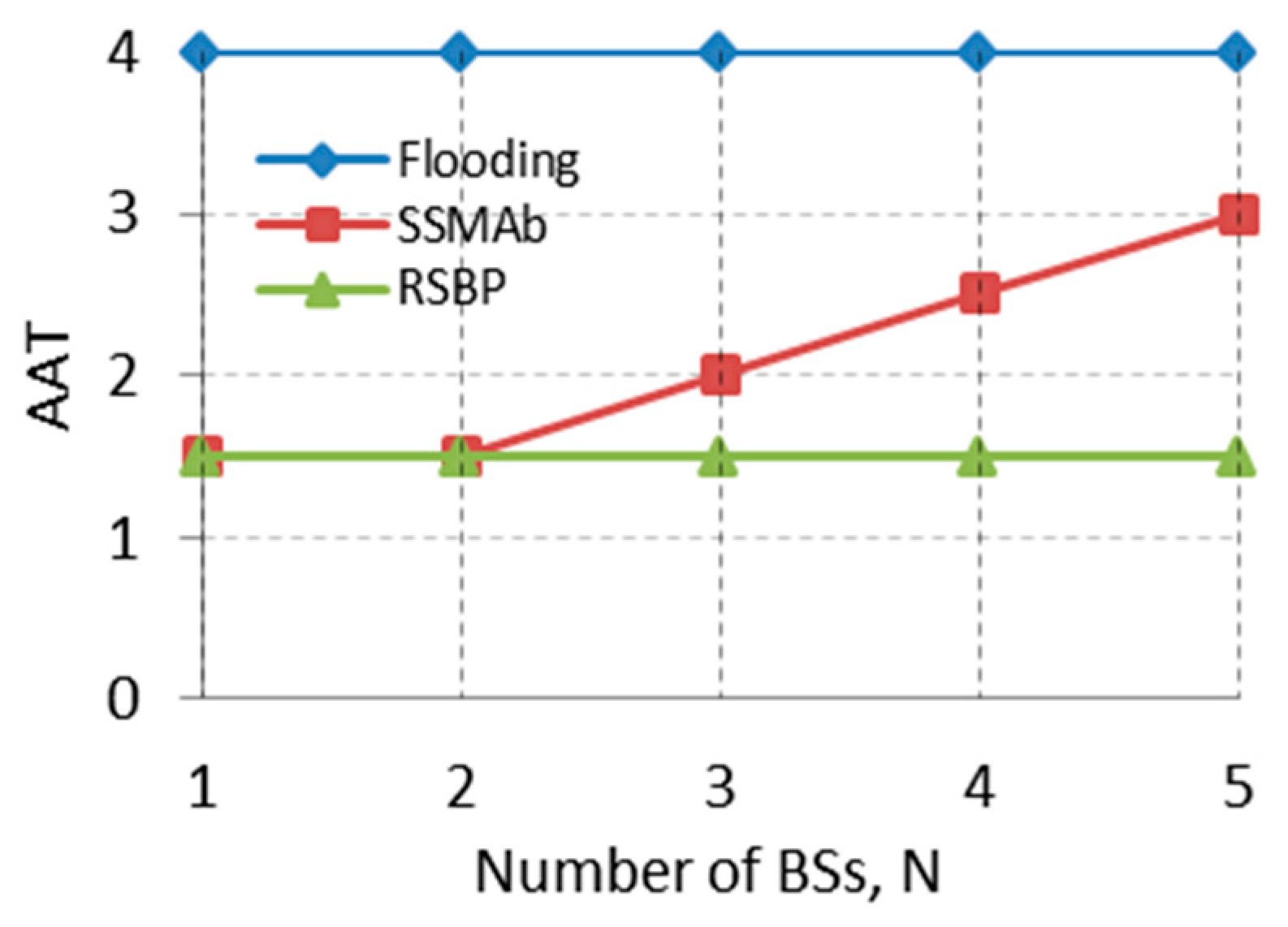
4.1. Analysis of End-to-End Delay
4.2. Simulation
4.2.1. Simulation Setup
4.2.2. Discussion of Simulation Results
4.3. Experiment
4.3.1. Experiment Setup
4.3.2. Determination of Protocol Parameter Values for Experiment
4.3.3. Discussion of Experiment Results
5. Concluding Remarks
Author Contributions
Funding
Conflicts of Interest
References
- Oh, H.; Ngo, C.T. A Slotted Sense Multiple Access Protocol for Timely and Reliable Data Transmission in Dynamic Wireless Sensor Networks. IEEE Sens. J. 2018, 18, 2184–2194. [Google Scholar] [CrossRef]
- Sikora, A.; Groza, V.F. Coexistence of IEEE802.15.4 with other Systems in the 2.4 GHz-ISM-Band. In Proceedings of the 2005 IEEE Instrumentationand Measurement Technology Conference Proceedings, Ottawa, ON, Canada, 16–19 May 2005; pp. 1786–1791. [Google Scholar]
- Iu, M.-Y. Selective Flooding in Ad Hoc Networks; UWSpace: Waterloo, ON, Canada, 2002. [Google Scholar]
- Ferrari, F.; Zimmerling, M.; Thiele, L.; Saukh, O. Efficient network flooding and time synchronization with Glossy. In Proceedings of the 10th ACM/IEEE International Conference on Information Processing in Sensor Networks, Chicago, IL, USA, 12–14 April 2011; pp. 73–84. [Google Scholar]
- Zhang, Q.; Agrawal, D. Dynamic probabilistic broadcasting in mobile ad hoc networks. In Proceedings of the 2003 IEEE 58th Vehicular Technology Conference. VTC 2003-Fall (IEEE Cat. No.03CH37484), Orlando, FL, USA, 6–9 October 2003; Volume 5, pp. 2860–2864. [Google Scholar]
- Jeong, H.; Yoo, Y. Dynamic probabilistic flooding algorithm based-on neighbor information in wireless sensor networks. In Proceedings of the International Conference on Information Network 2012, Washington, DC, USA, 1–3 February 2012; pp. 340–345. [Google Scholar]
- Wan, P.-J.; Alzoubi, K.M.; Friede, O. Distributed construction of connected dominating set in wireless ad hoc networks. In Proceedings of the Twenty-First Annual Joint Conference of the IEEE Computer and Communications Societies, New York, NY, USA, 23–27 June 2002; Volume 3, pp. 1597–1604. [Google Scholar]
- FathimaRamzi, A.; Fatima, N.S. Collision Optimized Broadcast Scheduling in Wireless Sensor Network. IJCA 2015, 119, 9–13. [Google Scholar] [CrossRef]
- Zhao, D.; Chin, K.-W.; Raad, R. Minimizing broadcast latency and redundancy in asynchronous wireless sensor networks. Wireless Netw. 2013, 20, 345–360. [Google Scholar] [CrossRef]
- Lai, X.; Wang, H. RNOB: Receiver Negotiation Opportunity Broadcast Protocol for Trustworthy Data Dissemination in Wireless Sensor Networks. IEEE Access 2018, 6, 53235–53242. [Google Scholar] [CrossRef]
- Zhang, X.; Jia, X.; Yan, F. Dynamic Delegation based Efficient Broadcast Protocol for Asynchronous Wireless Sensor Networks. IEEE Commun. Lett. 2016, 20, 1195–1198. [Google Scholar] [CrossRef]
- Niu, J.; Cheng, L.; Gu, Y.; Jun, J.; Zhang, Q. Minimum-delay and energy-efficient flooding tree in asynchronous low-duty-cycle wireless sensor networks. In Proceedings of the 2013 IEEE Wireless Communications and Networking Conference (WCNC), Shanghai, China, 7–10 April 2013; pp. 1261–1266. [Google Scholar]
- Wu, S.; Niu, J.; Chou, W.; Guizani, M. Delay-Aware Energy Optimization for Flooding in Duty-Cycled Wireless Sensor Networks. IEEE Trans. Wireless Commun. 2016, 15, 8449–8462. [Google Scholar] [CrossRef]
- Van Vinh, P.; Oh, H.; Vinh, P. RSBP: A reliable slotted broadcast protocol in wireless sensor networks. Sensors 2012, 12, 14630–14646. [Google Scholar] [CrossRef] [PubMed]
- Ugurlu, O.; Tanir, D.; Nuri, E. A better heuristic for the minimum connected dominating set in ad hoc networks. In Proceedings of the 2016 IEEE 10th International Conference on Application of Information and Communication Technologies (AICT), Baku, Azerbaijan, 12–14 October 2016; pp. 1–4. [Google Scholar]
- Mung, T.V.; Oh, H. SSMA B: A Slotted Sense Multiple Access Broadcasting Protocol for Dynamic Wireless Sensor Networks. Proced. Comput. Sci. 2015, 56, 205–212. [Google Scholar]
- Abramson, N. The Aloha System: Another alternative for computer communications. In Proceedings of the November 17–19, 1970, Fall Joint Computer Conference (AFIPS ‘70 (Fall)), Houston, TX, USA, 17–19 November 1970; pp. 281–285. [Google Scholar]
- Jacquet, P.; Mühlethaler, P.; Clausen, T.; Laouiti, A.; Qayyum, A.; Viennot, L. Optimized link state routing protocol for ad hoc networks. In Proceedings of the IEEE International Multi Topic Conference, 2001. IEEE INMIC 2001. Technology for the 21st Century, Lahore, Pakistan, 30 December 2001; pp. 62–68. [Google Scholar]
- Institute of Electrical and Electronics Engineers. IEEE Standard for Low-Rate Wireless Networks. IEEE Std 802.15.4-2015 (Revision of IEEE Std 802.15.4-2011); IEEE: Piscataway, NJ, USA, 2016; pp. 1–709. [Google Scholar]
- Guo, L.; Harfoush, K.; Xu, H. Distribution of the Node Degree in MANETs. In Proceedings of the Next Generation Mobile Applications, Services and Technologies (NGMAST), 2010 Fourth International Conference, Amman, Jordan, 27–29 July 2010; pp. 162–167. [Google Scholar]
- Dung, L.T.; An, B. A modeling framework for supporting and evaluating performance of multi-hop paths in mobile ad-hoc wireless networks. Comput. Math. Appl. 2012, 64, 1197–1205. [Google Scholar] [CrossRef]
- TI User Guide Document. Available online: http://pdf1.alldatasheet.com/datasheet-pdf/view/834344/TI1/CC2630.html (accessed on 11 March 2019).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tree Level | BS Schedule | Broadcast Slots in BSS | |||
|---|---|---|---|---|---|
| 1 | S(1) | 2 | 3 | 4 | |
| 2 | S(2) | 5 | |||
| S(3) | 8 | 7 | |||
| S(4) | 9 | ||||
| 3 | S(5) | ||||
| S(7) | |||||
| S(8) | |||||
| S(9) | |||||
| Features | Flooding | DPFNI | RSBP | SSMAb |
|---|---|---|---|---|
| Reliability of message delivery | Multiple chances of receiving a message | Multiple chances of receiving with probability | A single chance of receiving with no collision | Multiple chances of receiving with reduced collision |
| Very high | High | Mid | High | |
| Delay in message delivery | Random delay | Random delay | Time bound by slot schedule | Time bound by sharable slot schedule |
| Low | Low | High | High | |
| Concurrency of broadcast | Free broadcast after random delay | Free broadcast after random delay | Scheduled broadcast | Scheduled concurrency at the same tree level |
| High | High | Zero | Mid | |
| Energy consumption | Rebroadcasting by all nodes and long active time | Rebroadcasting with probability and long active time | Rebroadcasting by internal nodes only and managed active time | Rebroadcasting by internal nodes only and managed active time |
| High | High | Optimal | Low | |
| Responsiveness to dynamic topology | No topology | Topology-dependent probability | Tree topology and topology-dependent | Tree topology and topology-independent |
| High | Mid–High | Low | Mid–High | |
| Scheduling overhead | No scheduling | No scheduling | Centralized scheduling | Distributed scheduling |
| No | No | High | Almost negligible |
| Parameters | SSMAb (CW = 3) | RSBP | GLOSSY | DPFNI | SSMAb (CW = 3) | RSBP | GLOSSY | DPFNI |
|---|---|---|---|---|---|---|---|---|
| Len(BS) (ms) | 4.67 | 3.58 | n/a | n/a | 4.67 | 3.58 | n/a | n/a |
| N | 4 | n/a | n/a | n/a | 5 | n/a | n/a | n/a |
| Depth H | 5 | n/s | 5 | 5 | 6 | n/s | 6 | 6 |
| nBNodes | n/s | 15 | n/a | n/a | n/a | 26 | n/a | n/a |
| E2ED (ms) | 60.7 | 53.7 | 18.9 | 32.9 | 98.1 | 93.1 | 22.6 | 39.5 |
| Common | Dimension = 30 × 30 (m2), #Nodes = 30, R = 10 m, p = 100 bytes | Dimension = 100 × 100 (m2), #Nodes = 75, R = 28 m, p = 100 bytes | ||||||
| S1 | S2 | S3 |
|---|---|---|
 |  |  |
| Dimension: 10 × 90 (m2) | 30 × 30 (m2) | 100 × 100 (m2) |
| Number of nodes: 1 sink + 30 nodes | 1 sink + 30 nodes | 1 sink + 75 nodes |
| Transmission range: 10 m (−29 dBm) | 10 m (−29 dBm) | 28 m (−24 dBm) |
| Node distribution: Artificial | Random | Random |
| Parameters | S2M | S3M |
|---|---|---|
| Node distribution with the trace of node movement |  |  |
| Mobility model | Random waypoint | |
| % of mobile nodes (nMNodes) | 10%, 20%, 30%, 40% | |
| Average speed (mps) | [1.0, 1.5] | |
| Pause time (seconds) | 5 | |
| Parameters | Values |
|---|---|
| Number of nodes | 25 nodes and 1 sink |
| N | 3 |
| CW | 3 |
| Transmission power | −12 dBm () |
| Number of mobile nodes | 1 to 3 |
| Dimension | About 2.5 m × 70 m |
| Payload, p | 100 bytes |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yoo, D.-S.; Ta, V.K.; Jang, B.-T.; Oh, H. An Energy-Efficient Slotted Sense Multiple Access Broadcast Protocol for Reliable Command Delivery in Dynamic Wireless Sensor Networks. Sensors 2019, 19, 1236. https://doi.org/10.3390/s19051236
Yoo D-S, Ta VK, Jang B-T, Oh H. An Energy-Efficient Slotted Sense Multiple Access Broadcast Protocol for Reliable Command Delivery in Dynamic Wireless Sensor Networks. Sensors. 2019; 19(5):1236. https://doi.org/10.3390/s19051236
Chicago/Turabian StyleYoo, Dae-Seung, Van Khoe Ta, Byung-Tae Jang, and Hoon Oh. 2019. "An Energy-Efficient Slotted Sense Multiple Access Broadcast Protocol for Reliable Command Delivery in Dynamic Wireless Sensor Networks" Sensors 19, no. 5: 1236. https://doi.org/10.3390/s19051236
APA StyleYoo, D. -S., Ta, V. K., Jang, B. -T., & Oh, H. (2019). An Energy-Efficient Slotted Sense Multiple Access Broadcast Protocol for Reliable Command Delivery in Dynamic Wireless Sensor Networks. Sensors, 19(5), 1236. https://doi.org/10.3390/s19051236