Using a Parallel Helical Sensing Cable for the Distributed Measurement of Ground Deformation

Abstract
:1. Introduction
2. Mechanism of a Parallel Spiral Transmission Line
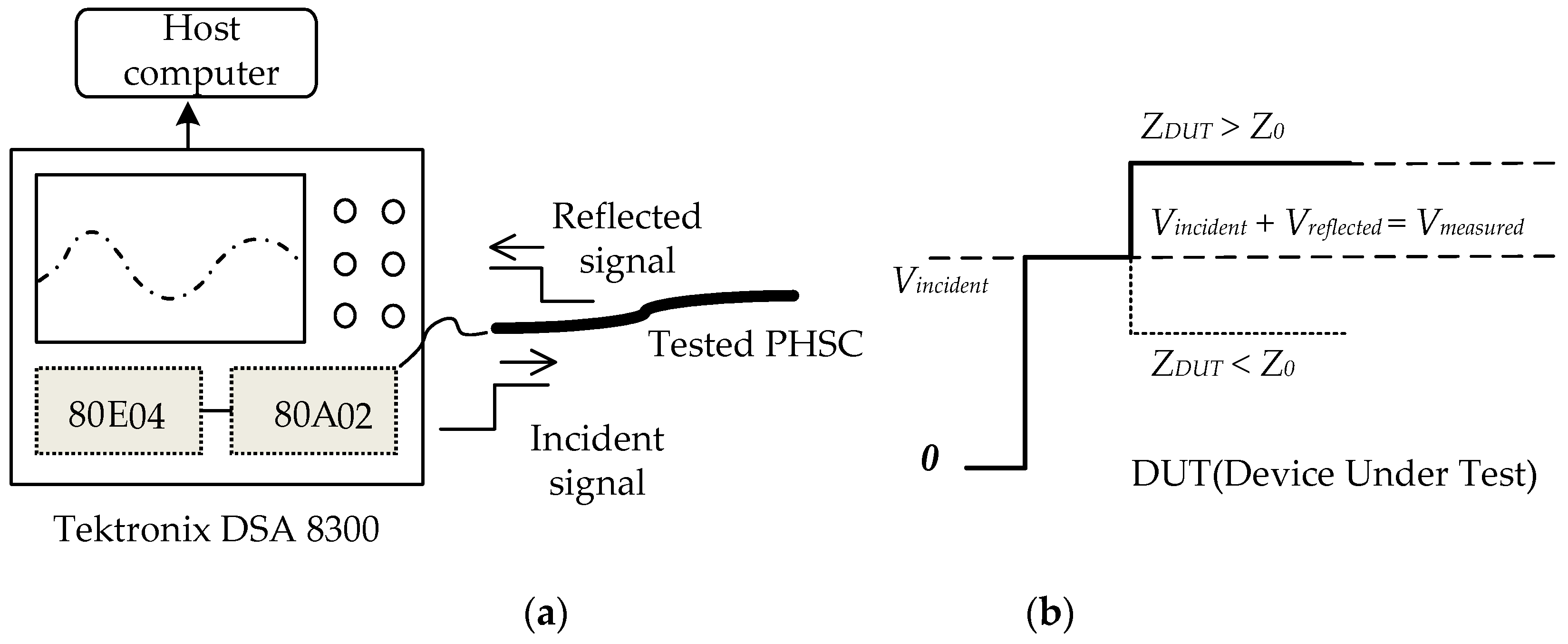
3. Principle of the TDR Technique
4. Distributed Parameters and Characteristic Impedance of PHSC
5. Measurement Experiments
5.1. Tensile Test Platform
5.2. Point Positioning Calibration Experiment
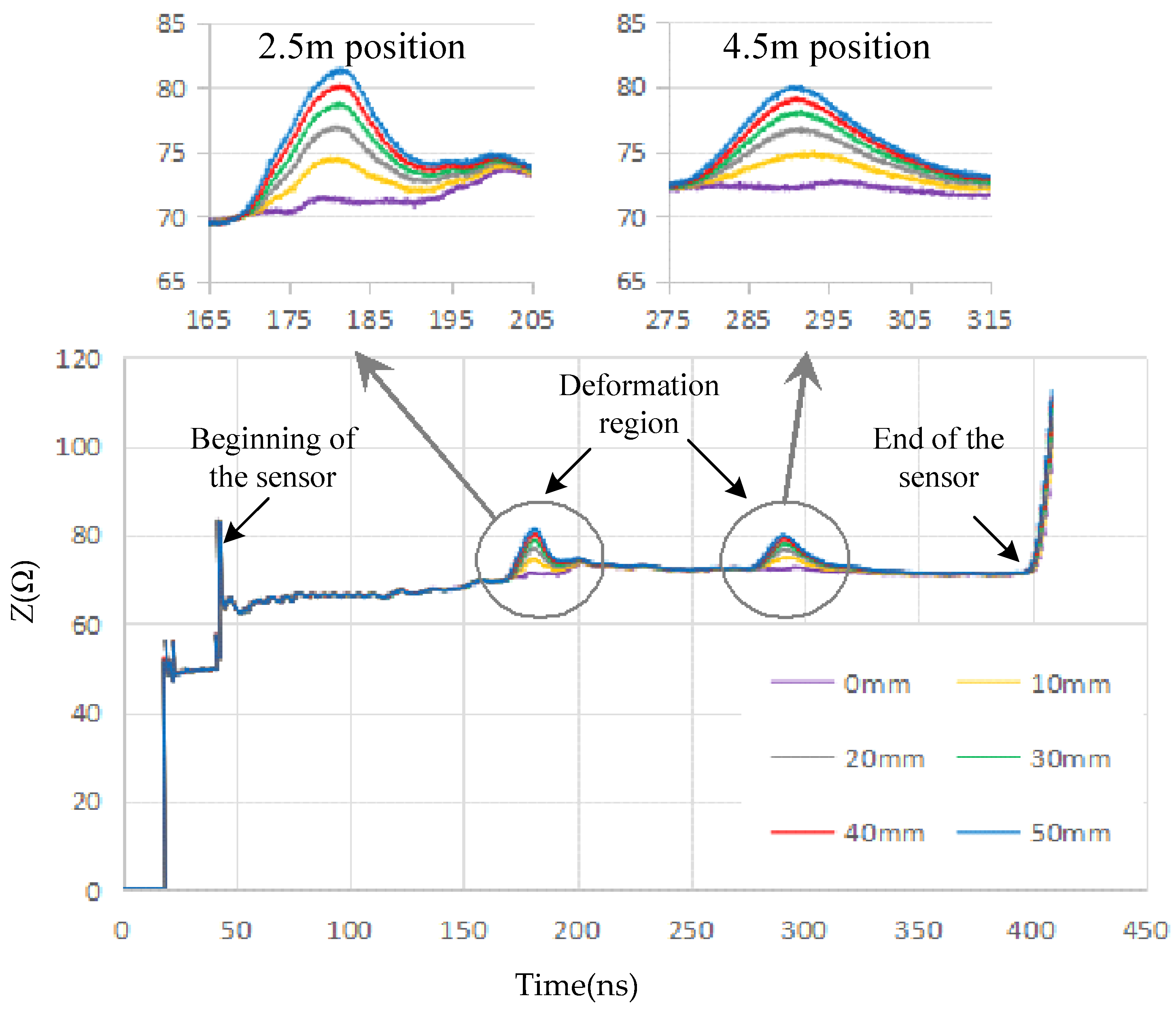
5.3. Stretched Deformation Experiment
6. Conclusions
- (1)
- Ground deformation monitoring based on the TDR technique and proposed PHSC is a very feasible technique, and the sensing parallel spiral transmission line implantation method is quite effective.
- (2)
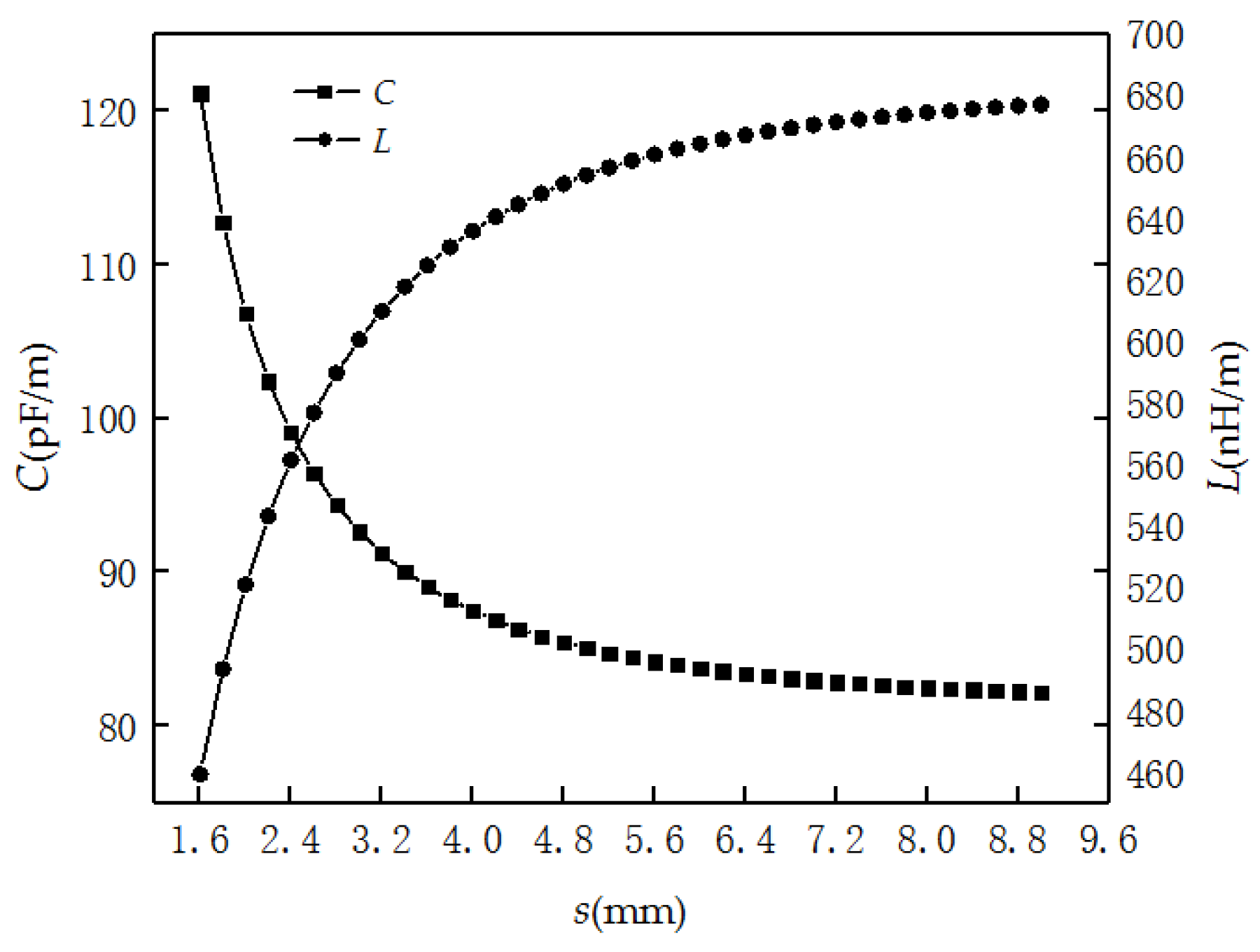
- A distribution parameter calculation model of PHSC is proposed and used to derive the distributed capacitance, distributed inductance, and characteristic impedance. The distribution capacitance becomes smaller with the increase of stretched s, and distribution inductance becomes larger. The relationship between the stretched deformation and the characteristic impedance of PHSC can be found based on the model and is shown here as Equation (15). It can be seen from Equation (15) that the impedance increases when the cable is stretched.
- (3)
- The derived characteristic impedance is related to the physical size of the equivalent radius of the two wires, the fixed distance between the two parallel copper wires, the pitch of the spiral transmission line, the diameter of the central silica gel strip, and the angle between the wire and the vertical direction. The characteristic impedance decreases with the value of the equivalent radius of the two wires.
- (4)
- The characteristic impedance at the stretched center point is a maximum when s is a fixed value. The deformation region is divided into the stretched deformation region, the gradual region, and a normal region. The characteristic impedance decreases from the maximum at the center point of stretched region to the minimum of the normal region.
- (5)
- In application, tensile deformation can be obtained based on the measured characteristic impedance of the PHSC. The function of the stretched deformation and characteristic impedance can be obtained by curve fitting based on the theoretically calculated results. According to the function, the stretched deformation measurement is carried out.
- (6)
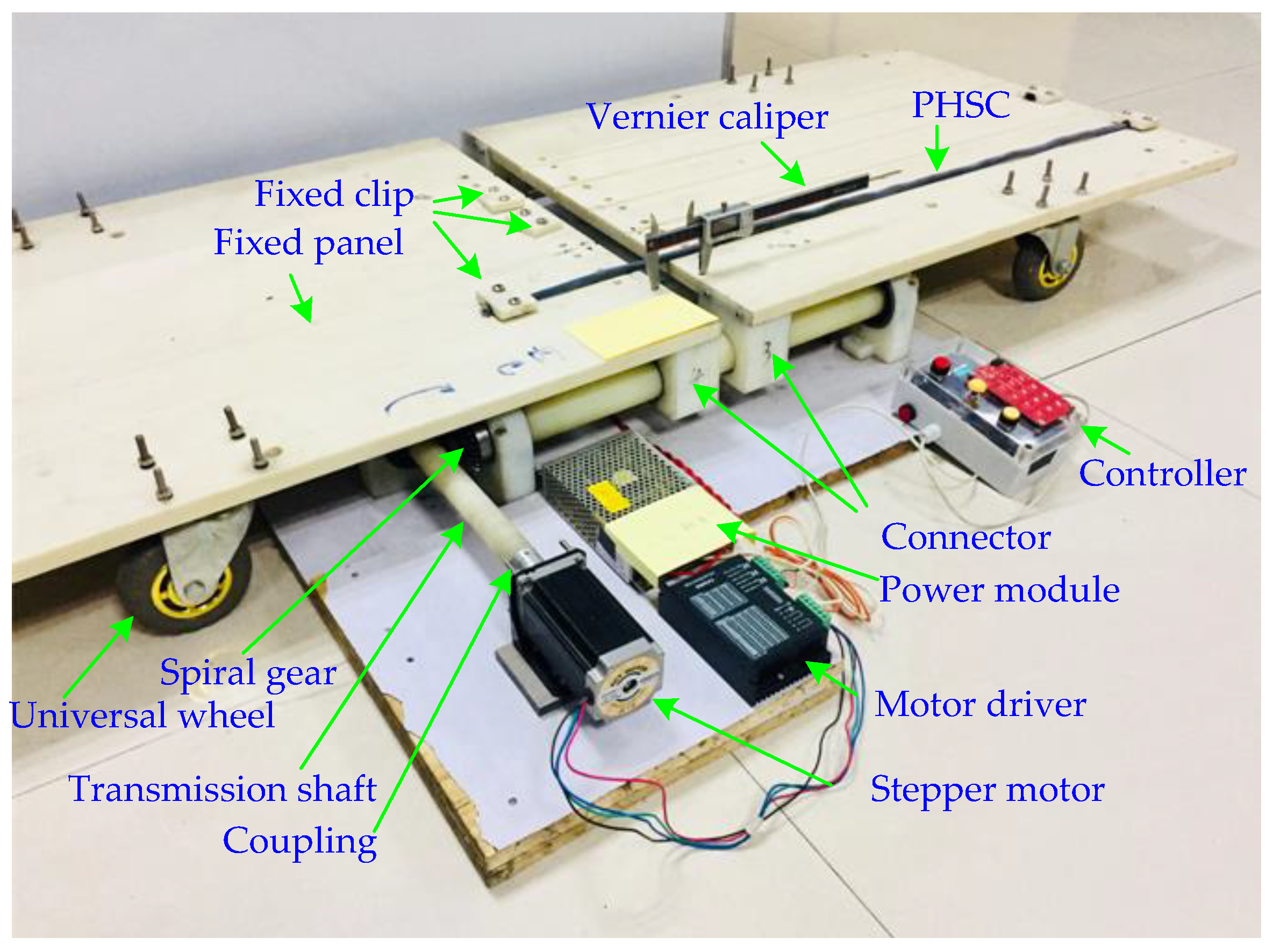
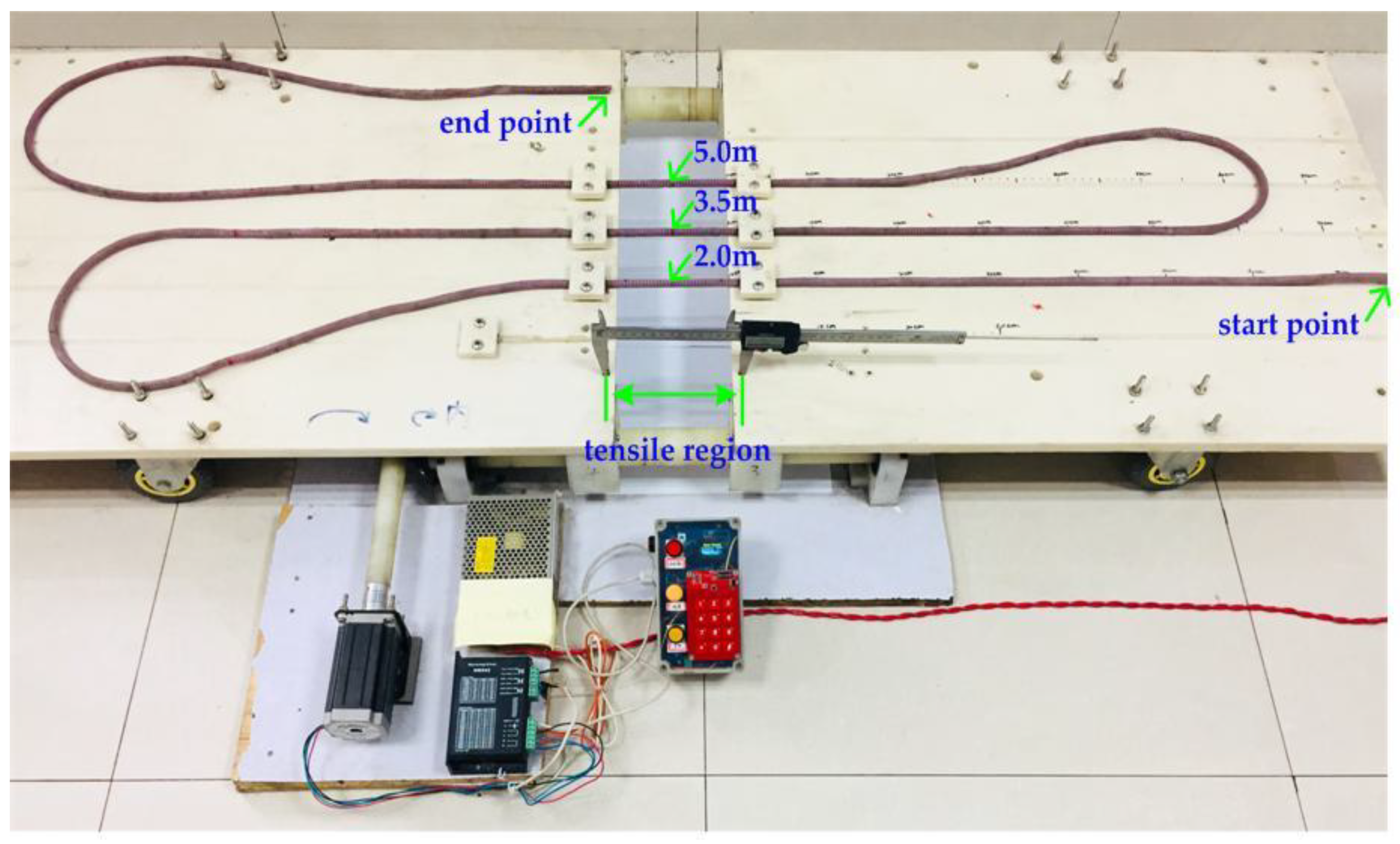
- A measurement experiment platform, including a stretching device, TDR measurement system, and host computer software, was established to carry out the multi-point positioning measurement and the amount of stretched deformation measurement at different positions. The theoretically calculated results are in good agreement with the experiment results, which show that the PHSC can measure the rock–soil large deformation and verify the accuracy of the theoretical derivation.
Author Contributions
Funding
Conflicts of Interest
References
- Hulth, J. Instruments and methods using a draw-wire sensor to continuously monitor glacier melt. J. Glaciol. 2010, 56, 922–924. [Google Scholar] [CrossRef]
- Li, Y.H.; Xu, S.D.; Liu, J.P. A new convergence monitoring system for tunnel or drift based on draw-wire displacement sensors. Tunn. Undergr. Sp. Tech. 2015, 49, 92–97. [Google Scholar] [CrossRef]
- Blodgett, J.C.; Ikehara, M.E.; Williams, G.E. Monitoring land subsidence in sacramento valley, California, using GPS. J. Surv. Eng. 1990, 116, 112–130. [Google Scholar] [CrossRef]
- Huang, M.-H.; Fielding, E.J.; Liang, C.; Milillo, P.; Bekaert, D.; Dreger, D.; Salzer, J.T. Coseismic deformation and triggered landslides of the 2016 Mw 6.2 Amatrice earthquake in Italy. Geophys. Res. Lett. 2017, 44, 1266–1274. [Google Scholar] [CrossRef]
- Mair, R.J.; Bowers, K.; Mohamad, H.; Bennett, P.J.; Soga, K. Behaviour of an old masonry tunnel due to tunneling-induced ground settlement. Geotechnique 2010, 60, 927–938. [Google Scholar]
- Van Der Meer, F.D.; van der Werff, H.M.A.; van Ruitenbeek, F.J.A.; Hecker, C.A.; Bakker, W.H.; Noomen, M.F.; van der Meijde, M.K.; Carranza, E.J.M.; de Smeth, J.B.; Woldai, T. Multi- and hyperspectral geologic remote sensing: A review. Int. J. Appl. Earth Obs. Geoinf. 2011, 14, 112–128. [Google Scholar] [CrossRef]
- Scaioni, M.; Marsella, M.; Crosetto, M.; Tornatore, V.; Wang, J. Geodetic and remote-sensing sensors for dam deformation monitoring. Sensors 2018, 18, 3682. [Google Scholar] [CrossRef] [PubMed]
- Tapete, D.; Casagli, N.; Luzi, G.; Fanti, R.; Gigli, G.; Leva, D. Integrating radar and laser-based remote sensing techniques for monitoring structural deformation of archaeological monuments. J. Agric. Sci. 2013, 40, 176–189. [Google Scholar] [CrossRef]
- Grandin, R.; Vallée, M.; Satriano, C.; Lacassin, R.; Klinger, Y.; Simoes, M.; Bollinger, L. Rupture process of the Mw = 7.9 2015 Gorkha earthquake (Nepal): Insights into himalayan megathrust segmentation. Geophys. Res. Lett. 2015, 42, 8373–8838. [Google Scholar] [CrossRef]
- Fanti, R.; Gigli, G.; Lombardi, L.; Tapete, D.; Canuti, P. Terrestrial laser scanning for rockfall stability analysis in the cultural heritage site of Pitigliano (Italy). Landslides 2013, 10, 409–420. [Google Scholar] [CrossRef]
- Bao, X.; Chen, L. Recent progress in distributed fiber optics Sensors. Sensors 2012, 12, 8601–8639. [Google Scholar] [CrossRef]
- Ding, Y.; Shi, B.; Bao, X.; Gao, J. Jacket effect on strain measurement accuracy for distributed strain sensors based on Brillouin scattering. Opt. Appl. 2006, 36, 57–67. [Google Scholar]
- Mohamad, H.; Soga, K.; Bennett, P.J.; Mair, R.J.; Lim, C.S. Monitoring twin tunnel interaction using distributed optical fiber strain measurements. J. Geotech. Geoenviron. Eng. 2012, 138, 957–967. [Google Scholar] [CrossRef]
- Wang, B.-J.; Li, K.; Shi, B.; Wei, G.-Q. Test on application of distributed fiber optic sensing technique into soil slope monitoring. Landslides 2009, 6, 61–68. [Google Scholar] [CrossRef]
- Zhang, C.-C.; Zhu, H.-H.; Shi, B.; She, J.-K. Interfacial characterization of soil-embedded optical fiber for ground deformation measurement. Smart Mater. Struct. 2014, 23, 095022. [Google Scholar] [CrossRef]
- Lin, C.-P.; Tang, S.-H.; Lin, W.-C.; Chung, C.-C. Quantification of cable deformation with time domain reflectometry-implications to landslide monitoring. J. Geotech. Geoenviron. Eng. 2009, 135, 143–152. [Google Scholar] [CrossRef]
- Su, M.B.; Chen, I.H.; Liao, C.H. Using TDR cables and GPS for landslide monitoring in high mountain area. J. Geotech. Geoenviron. Eng. 2009, 135, 1113–1121. [Google Scholar] [CrossRef]
- Moss, J.L. Using the Global Positioning System to monitor dynamic ground deformation networks on potentially active landslides. Int. J. App. Earth Obs. 2000, 2, 24–32. [Google Scholar] [CrossRef]
- Yigit, C.O.; Zeki Coskun, M.; Yavasoglu, H.; Arslan, A.; Kalkan, Y. The potential of GPS precise point positioning method for point displacement monitoring: A case study. Measurement 2016, 91, 398–404. [Google Scholar] [CrossRef]
- Barla, G.; Antolini, F.; Barla, M.; Mensi, E.; Piovano, G. Monitoring of the beauregard landslide (Aosta Valley, Italy) using advanced and conventional techniques. Eng. Geol. 2010, 116, 218–235. [Google Scholar] [CrossRef]
- Lavecchia, G.; Castaldo, R.; de Nardis, R.; De Novellis, V.; Ferrarini, F.; Pepe, S.; Brozzetti, F.; Solaro, G.; Cirillo, D.; Bonano, M.; et al. Ground deformation and source geometry of the 24 August 2016 Amatrice earthquake (Central Italy) investigated through analytical and numerical modeling of DInSAR measurements and structural-geological data. Geophys. Res. Lett. 2016, 43, 12389–12398. [Google Scholar] [CrossRef]
- Miskiewicz, M.; Lachowicz, J.; Tysiac, P.; Jaskula, P.; Wilde, K. The application of non-destructive methods in the diagnostics of the approach pavement atthe bridges. In Proceedings of the Resilient and Safe Road Infrastructure, Kielce, Poland, 8–9 May 2018. [Google Scholar]
- Liu, J.; Wang, Y.; Lu, Y.; Wei, J.H.; Kanungo, D.P. Application of distributed optical fiber sensing technique in monitoring the ground deformation. J. Sens. 2017, 2017, 6310197. [Google Scholar] [CrossRef]
- Lin, C.P.; Tang, S.H. Comprehensive wave propagation model to improve TDR interpretations for geotechnical applications. Geotech. Test. J. 2007, 30, 90–97. [Google Scholar]
- Tong, R.Y.; Ming, L.; Qing, L. Study on Elastic Helical TDR Sensing Cable for Distributed Deformation Detection. Sensors 2012, 12, 9586–9602. [Google Scholar] [CrossRef] [PubMed]
- Bishop, J.A.; Pommerenke, D.J.; Chen, G. A rapid-acquisition electrical time-domain reflectometer for dynamic structure analysis. IEEE Trans. Instrum. Meas. 2010, 60, 655–661. [Google Scholar] [CrossRef]
- Aghda, S.M.F.; GanjaliPour, K.; Nabiollahi, K. Assessing the accuracy of TDR-based water leak detection system. Results Phys. 2018, 8, 939–948. [Google Scholar] [CrossRef]
- Pan, S.G. Characteristic impedance of a coaxial system consisting of circular and noncircular conductors. IEEE Trans. Microwave Theory Tech. 1988, 36, 917–921. [Google Scholar] [CrossRef]
- Moradi, G.; Abdipour, A. Measuring the permittivity of dielectric materials using STDR approach. Progr. Electromag. Res. 2007, 77, 357–365. [Google Scholar] [CrossRef]
- Dowding, C.H.; Summers, J.A.; Taflove, A.; Kath, W.L. Electromagnetic wave propagation model for differentiation of geotechnical disturbances along buried cables. Geotech. Test. J. 2002, 25, 449–458. [Google Scholar]
- Griffiths, D.J.; Heald, M.A. Time-dependent generalizations of the Biot-Savart and Coulomb laws. Am. J. Phys. 1991, 59, 111–117. [Google Scholar] [CrossRef]
- De Melo e Souza, R.; Cougo-Pinto, M.V.; Farina, C.; Moriconi, M. Multipole radiation fields from the Jefimenko Equation for the magnetic field and the Panofsky-Phillips Equation for the electric field. Am. J. Phys. 2009, 77, 67–72. [Google Scholar] [CrossRef]
- Cerny, R. Time-domain reflectometry method and its application for measuring moisture content in porous materials: A review. Measurement 2009, 42, 329–336. [Google Scholar] [CrossRef]
- Todoroki, A.; Kurokawa, H.; Mizutani, Y.; Matsuzaki, R.; Yasuoka, T. Self-sensing time domain reflectometry method for damage monitoring of a CFRP plate using a narrow-strip transmission line. Compos. Part B 2014, 58, 59–65. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types | Parameters | De (mm) |
|---|---|---|
| 24AWG | 40 × 0.08TS | 0.5060 |
| 22AWG | 60 × 0.08TS | 0.6197 |
| 20AWG | 100 × 0.08TS | 0.8000 |
| 18AWG | 150 × 0.08TS | 0.9798 |
| Position(m) | Measured Result(m) | Absolute Error(m) | Reference Error |
|---|---|---|---|
| 2.000 | 1.993 | −0.007 | −0.106% |
| 3.500 | 3.501 | 0.001 | 0.015% |
| 5.000 | 5.006 | 0.006 | 0.091% |
| s (mm) | Z2m (Ω) | Z4m (Ω) | s (mm) | Z2m (Ω) | Z4m (Ω) |
|---|---|---|---|---|---|
| 1.600 | 69.53 | 71.98 | 2.084 | 79.35 | 77.93 |
| 1.681 | 72.41 | 73.78 | 2.165 | 80.45 | 78.63 |
| 1.761 | 74.23 | 74.80 | 2.245 | 81.44 | 79.05 |
| 1.842 | 75.62 | 75.83 | 2.326 | 82.06 | 79.64 |
| 1.923 | 77.12 | 76.71 | 2.406 | 82.75 | 80.14 |
| 2.003 | 78.32 | 77.50 | 2.487 | 83.34 | 80.49 |
| Set Tensile Amount (mm) | Tensile Position (m) | s(mm) | Z(Ω) | Measured Tensile Amount (mm) | Absolute Error (mm) |
|---|---|---|---|---|---|
| 5.000 | 2.500 | 1.680 | 72.96 | 4.879 | −0.121 |
| 4.500 | 73.79 | 3.944 | −1.056 | ||
| 10.000 | 2.500 | 1.760 | 74.52 | 9.601 | −0.399 |
| 4.500 | 74.83 | 9.081 | −0.919 | ||
| 15.000 | 2.500 | 1.840 | 75.81 | 14.112 | −0.888 |
| 4.500 | 75.89 | 15.806 | 0.806 | ||
| 20.000 | 2.500 | 1.920 | 76.96 | 18.959 | −1.041 |
| 4.500 | 76.76 | 21.221 | 1.221 | ||
| 25.000 | 2.500 | 2.000 | 77.77 | 23.593 | −1.407 |
| 4.500 | 77.46 | 26.147 | 1.147 | ||
| 30.000 | 2.500 | 2.080 | 78.67 | 28.785 | −1.215 |
| 4.500 | 78.21 | 31.470 | 1.470 | ||
| 35.000 | 2.500 | 2.160 | 79.46 | 33.566 | −1.434 |
| 4.500 | 78.57 | 36.747 | 1.747 | ||
| 40.000 | 2.500 | 2.240 | 80.17 | 38.478 | −1.522 |
| 4.500 | 79.14 | 41.964 | 1.964 | ||
| 45.000 | 2.500 | 2.320 | 80.94 | 43.196 | −1.804 |
| 4.500 | 79.66 | 47.415 | 2.415 | ||
| 50.000 | 2.500 | 2.400 | 81.37 | 47.740 | −2.260 |
| 4.500 | 80.05 | 52.820 | 2.820 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, X.; Tong, R.; Wang, Y.; Mei, C.; Li, Q. Using a Parallel Helical Sensing Cable for the Distributed Measurement of Ground Deformation. Sensors 2019, 19, 1297. https://doi.org/10.3390/s19061297
Wu X, Tong R, Wang Y, Mei C, Li Q. Using a Parallel Helical Sensing Cable for the Distributed Measurement of Ground Deformation. Sensors. 2019; 19(6):1297. https://doi.org/10.3390/s19061297
Chicago/Turabian StyleWu, Xiushan, Renyuan Tong, Yanjie Wang, Congli Mei, and Qing Li. 2019. "Using a Parallel Helical Sensing Cable for the Distributed Measurement of Ground Deformation" Sensors 19, no. 6: 1297. https://doi.org/10.3390/s19061297
APA StyleWu, X., Tong, R., Wang, Y., Mei, C., & Li, Q. (2019). Using a Parallel Helical Sensing Cable for the Distributed Measurement of Ground Deformation. Sensors, 19(6), 1297. https://doi.org/10.3390/s19061297