Resolvable Group State Estimation with Maneuver Based on Labeled RFS and Graph Theory †

Abstract
:1. Introduction
2. Backgrounds
2.1. Labeled Random Finite Set (RFS)
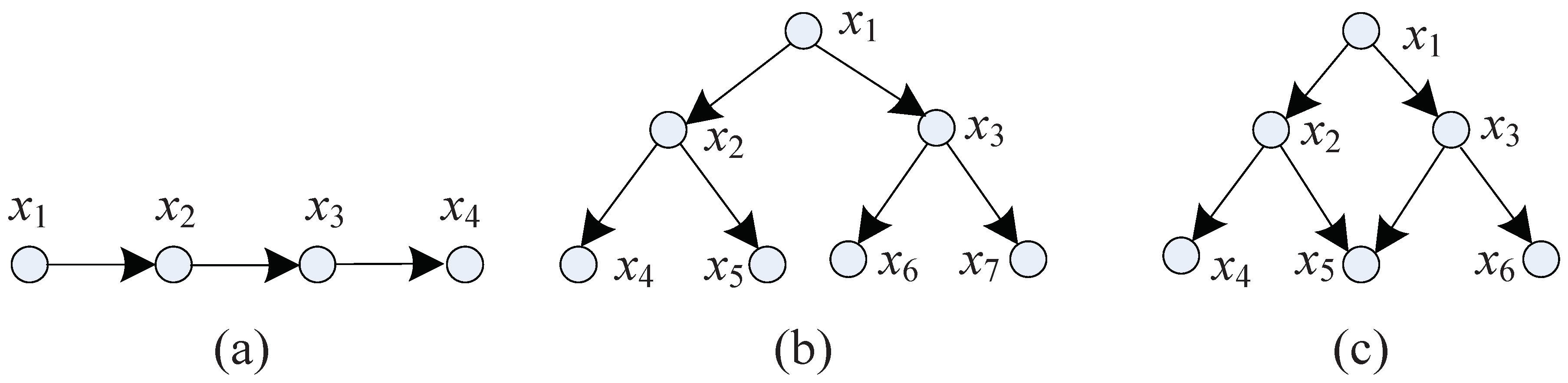
2.2. Graph Theory
3. Revolvable Group Tracking with Maneuver
3.1. Graph Theory Model of Labeled RFS
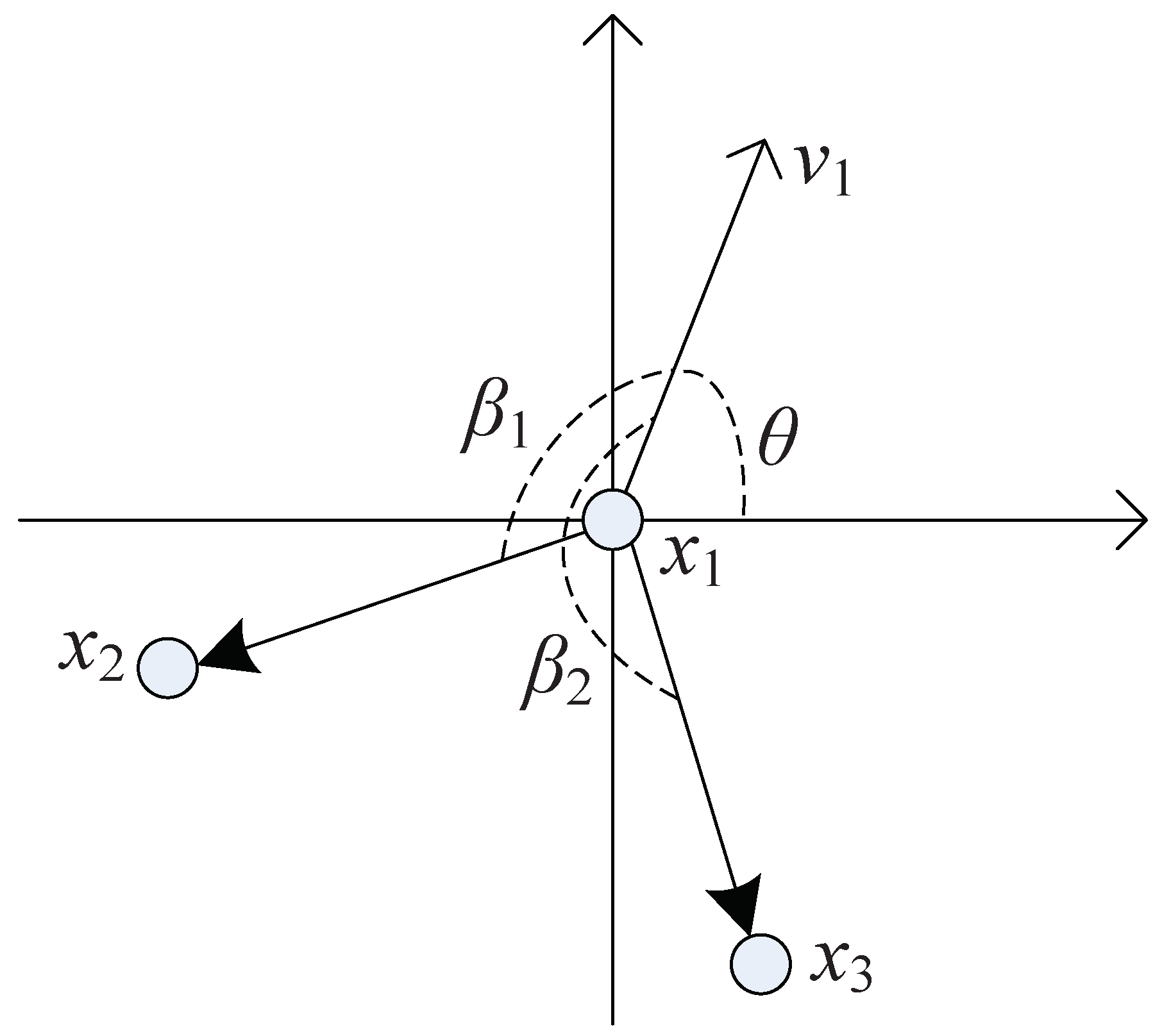
3.2. Dynamic Model of Multiple Resolvable Group
- The movement equations are all linear and same, i.e., .
- The movement mode is CV, CT with known turning rate, or the constant acceleration (CA).
- The formation of group targets are fixed and, thus, the displacement vector only exists in the position displacement, i.e., .
- The collaboration relation of individual targets are of tree graph. This means each vertex has only one father vertex.
3.2.1. State Prediction
3.2.2. State Update
4. The GLMB Filter for Resolvable Group Targets
4.1. The GLMB Filter
4.2. The UKF GLMB Filter
4.3. Efficient Implementation of the GLMB Filter
4.4. The Algorithm Implementation and Settings
5. Simulations
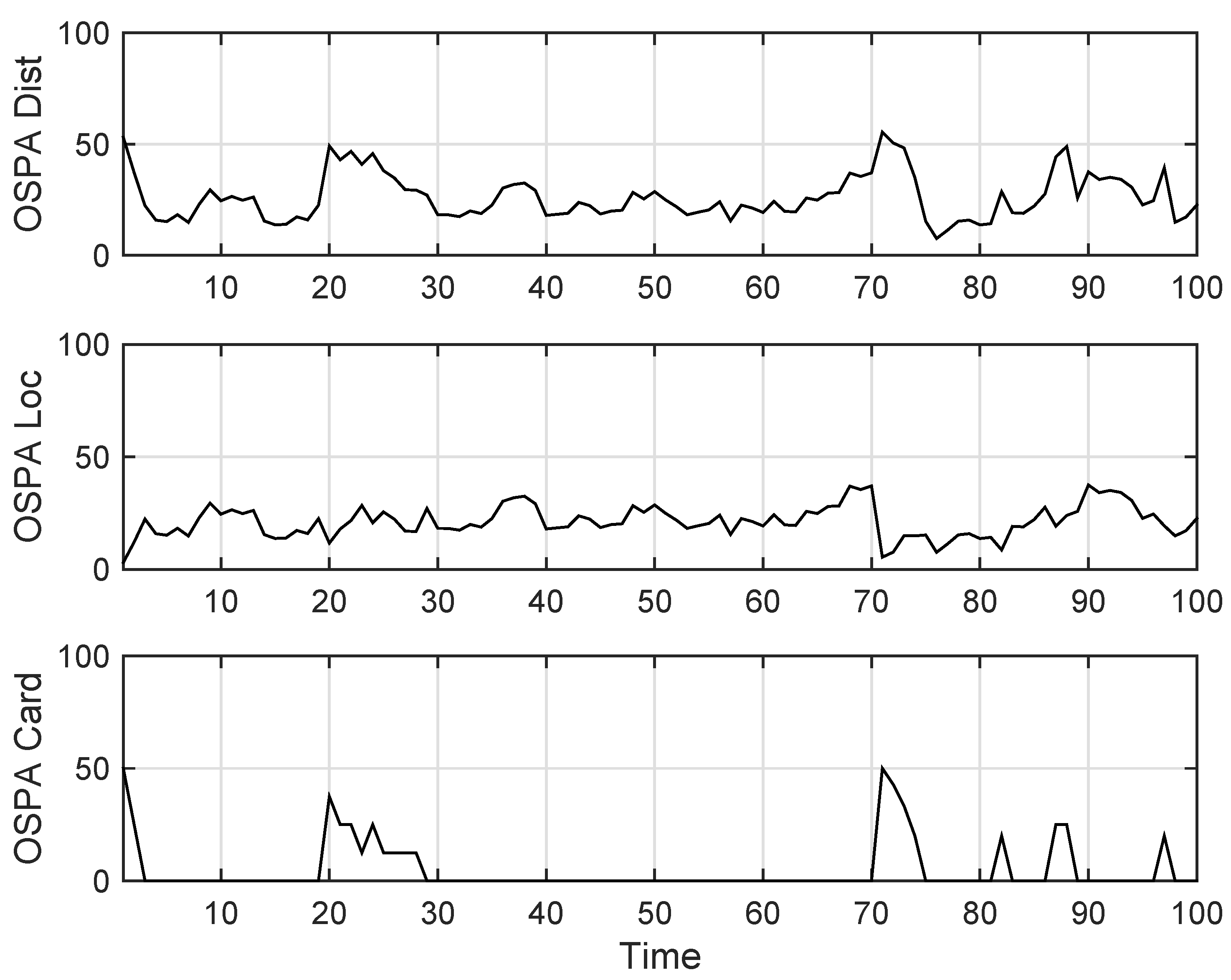
5.1. Scenario 1
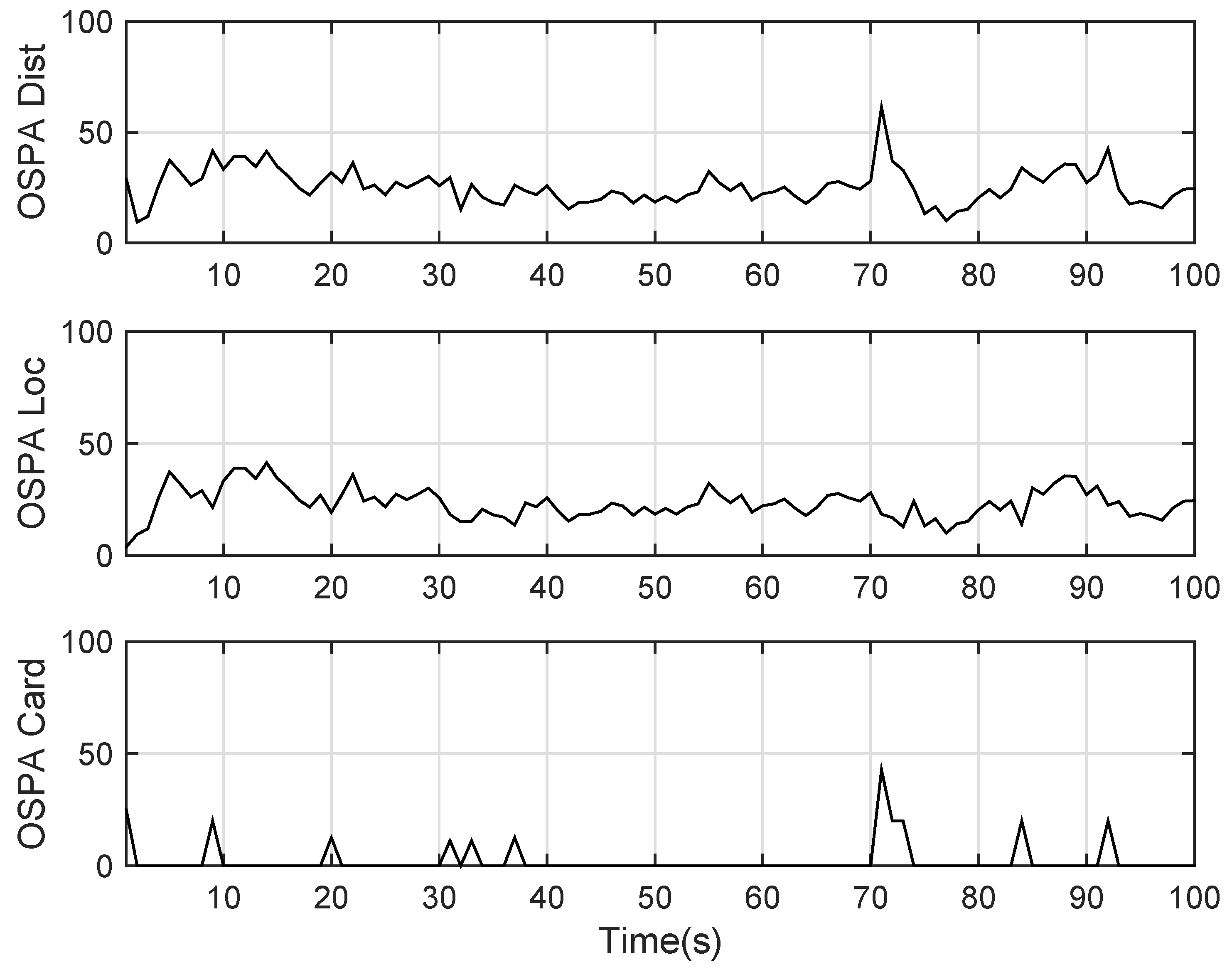
5.2. Scenario 2
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lian, F. Research on Multi-Target Tracking Method Based on Random Finite Set. Ph.D. Dissertation, Xi’an Jiaotong University, Xi’an, China, 2009. [Google Scholar]
- Peng, H.; Huang, G.; Tian, W. Random finite set theory application and implementation in multi-target tracking. Control Decis. 2017, 1326, 1–9. [Google Scholar]
- Li, T.; Fan, H.; Sun, S. Particle filtering theory, method and its application in multi-target tracking. Acta Autom. Sin. 2015, 41, 1981–2002. [Google Scholar]
- Mahler, R. Statistical Multisource-Multitarget Information Fusion; Artech House: Norwood, MA, USA, 2007. [Google Scholar]
- Mahler, R. Advances in Statistical Multisource-Multitarget Information Fusion; Artech House: Norwood, MA, USA, 2014. [Google Scholar]
- Vo, B.-N.; Vo, B.-T.; Pham, N.-T.; Suter, D. Joint Detection and Estimation of Multiple Objects from Image Observations. IEEE Trans. Signal Process. 2010, 58, 5129–5241. [Google Scholar]
- Chong, C.-Y.; Mori, S.; Reid, D. Forty years of Multiple Hypothesis Tracking—A review of key developments. In Proceedings of the 2018 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018. [Google Scholar]
- Mahler, R. Multitarget Bayes filtering via first-order multitarget moments. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1152–1178. [Google Scholar] [CrossRef]
- Vo, B.-N.; Singh, S.; Doucet, A. Sequential Monte Carlo methods for multi-target filtering with random finite sets. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1224–1245. [Google Scholar]
- Vo, B.-N.; Ma, W.-K. The Gaussian Mixture Probability Hypothesis Density Filter. IEEE Trans. Signal Process. 2006, 54, 4091–4104. [Google Scholar] [CrossRef] [Green Version]
- Mahler, R. PHD Filters of Higher Order in Target Number. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1523–1543. [Google Scholar] [CrossRef]
- Vo, B.-T.; Vo, B.-N.; Cantoni, A. Analytic implementations of the cardinalized probability hypothesis density filter. IEEE Trans. Signal Process. 2007, 55, 3553–3567. [Google Scholar] [CrossRef]
- Vo, B.-T.; Vo, B.-N. Labeled random finite sets and multi-object conjugate priors. IEEE Trans. Signal Process. 2013, 61, 3460–3475. [Google Scholar] [CrossRef]
- Vo, B.-N.; Vo, B.-T.; Phung, D. Labeled random finite sets and the Bayes multi-target tracking filter. IEEE Trans. Signal Process. 2014, 62, 6554–6567. [Google Scholar] [CrossRef]
- Vo, B.-N.; Vo, B.-T.; Hoang, H. An Efficient Implementation of the Generalized Labeled Multi-Bernoulli Filter. IEEE Trans. Signal Process. 2017, 65, 1975–1987. [Google Scholar] [CrossRef]
- Vo, B.-T.; Vo, B.-N. Multi-Scan Generalized Labeled Multi-Bernoulli Filter. In Proceedings of the 2018 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018. [Google Scholar]
- Vo, B.-T.; Vo, B.-N. A Multi-Scan Labeled Random Finite Set Model for Multi-object State Estimation. arXiv, 2018; arXiv:1805.10038. [Google Scholar]
- Beard, M.; Vo, B.-T.; Vo, B.-N. A Solution for Large-scale Multi-object Tracking. arXiv, 2018; arXiv:1804.06622. [Google Scholar]
- Chi, Y.; Liu, W. Resolvable Group State Estimation with Maneuver Movement Based on Labeled RFS. In Proceedings of the 2018 International Conference on Control, Automation and Information Sciences (ICCAIS), Hangzhou, China, 24–28 October 2018; pp. 249–254. [Google Scholar]
- Clark, D.E.; Ba-Ngu, V. Convergence analysis of the Gaussian mixture PHD filter. IEEE Trans. Signal Process. 2007, 55, 1204–1212. [Google Scholar] [CrossRef]
- Clark, D.E.; Bell, J. Convergence results for the particle PHD filter. IEEE Trans. Signal Process. 2006, 54, 2652–2660. [Google Scholar] [CrossRef]
- Lin, L.; Bar-Shalom, Y.; Kirubarajan, T. Track labeling and PHD filter for multitarget tracking. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 778–793. [Google Scholar] [CrossRef]
- Panta, K.; Ba-Ngu, V.; Singh, S. Novel data association schemes for the probability hypothesis density filter. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 556–570. [Google Scholar] [CrossRef]
- Clark, D.E.; Bell, J. Multi-target state estimaition and tracking continuity for the particle PHD filter. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1441–1453. [Google Scholar] [CrossRef]
- Vo, B.-T.; Vo, B.-N.; Cantoni, A. The Cardinality Balanced Multi-target Multi-Bernoulli filter and its implementations. IEEE Trans. Signal Process. 2009, 57, 409–423. [Google Scholar]
- Vo, B.-N.; Vo, B.-T. Multi-Sensor Multi-object Tracking with the Generalized Labeled Multi-Bernoulli Filter. arXiv, 2017; arXiv:1702.08849. [Google Scholar]
- Reuter, S.; Vo, B.-T.; Vo, B.-N.; Dietmayer, K. The labelled multi-Bernoulli filter. IEEE Trans. Signal Process. 2014, 62, 3246–3260. [Google Scholar]
- Fantacci, C.; Papi, F. Scalable Multisensor Multitarget Tracking Using the Marginalized δ-GLMB Density. IEEE Signal Process. Lett. 2016, 23, 863–867. [Google Scholar] [CrossRef]
- Vo, B.-N.; Dam, N.; Phung, D.; Tran, Q.N.; Vo, B.-T. Model Based Learning for Point Pattern Data. Pattern Recognit. 2018, 84, 136–151. [Google Scholar] [CrossRef]
- Maggio, E.; Taj, M.; Cavallaro, A. Efficient multitarget visual tracking using random finite sets. IEEE Trans. Circuits Syst. Video Technol. 2008, 18, 1016–1027. [Google Scholar] [CrossRef]
- Hoseinnezhad, R.; Vo, B.-N.; Vo, B.T.; Suter, D. Visual tracking of numerous targets via multi-bernoulli filtering of image data. Pattern Recognit. 2012, 45, 3625–3635. [Google Scholar] [CrossRef]
- Hoseinnezhad, R.; Vo, B.-N.; Vo, B.-T. Visual tracking in background subtracted image sequences via multi-bernoulli filtering. IEEE Trans. Signal Process. 2013, 61, 392–397. [Google Scholar] [CrossRef]
- Punchihewa, Y.G.; Vo, B.-T.; Vo, B.-N.; Kim, D.Y. Multiple Object Tracking in Unknown Backgrounds with Labeled Random Finite Sets. IEEE Trans. Signal Process. 2018, 66, 3040–3055. [Google Scholar] [CrossRef]
- Kim, D.Y.; Vo, B.-N.; Vo, B.-T. Online Visual Multi-Object Tracking via Labeled Random Finite Set Filtering. arXiv, 2016; arXiv:1611.06011. [Google Scholar]
- Mullane, J.; Vo, B.-N.; Adams, M.; Vo, B.-T. A random-finite-set approach to Bayesian SLAM. IEEE Trans. Robot. 2011, 27, 268–282. [Google Scholar] [CrossRef]
- Meissner, D.; Reuter, S.; Dietmayer, K. Road user tracking at intersections using a multiple-model PHD filter. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast, Australia, 23–26 June 2013; pp. 377–382. [Google Scholar]
- Ristic, B.; Vo, B.-N. Sensor control for multi-object state-space estimation using random finite sets. Automatica 2010, 46, 1812–1818. [Google Scholar] [CrossRef]
- Ristic, B.; Vo, B.-N.; Clark, D. A note on the reward function for PHD filters with sensor control. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1521–1529. [Google Scholar] [CrossRef]
- Hoang, H.G.; Vo, B.T. Sensor management for multi-target tracking via multi-Bernoulli filtering. Automatica 2014, 50, 1135–1142. [Google Scholar] [CrossRef] [Green Version]
- Gostar, A.; Hoseinnezhad, R.; Bab-Hadiashar, A. Robust multi-bernoulli sensor selection for multi-target tracking in sensor networks. IEEE Signal Process. Lett. 2013, 20, 1167–1170. [Google Scholar] [CrossRef]
- Hoang, H.; Vo, B.-N.; Vo, B.T.; Mahler, R. The Cauchy-Schwarz divergence for Poisson point processes. IEEE Trans. Inf. Theory 2015, 61, 4475–4485. [Google Scholar] [CrossRef]
- Gostar, A.K.; Hoseinnezhad, R.; Bab-Hadiashar, A. Multi-Bernoulli sensor-selection for multi-target tracking with unknown clutter and detection profiles. Signal Process. 2016, 119, 28–42. [Google Scholar] [CrossRef]
- Gostar, A.K.; Hoseinnezhad, R.; Liu, W.; Bab-Hadiashar, A. Sensor-management for multi-target filters via minimization ofposterior dispersion. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2877–2884. [Google Scholar] [CrossRef]
- Beard, M.; Vo, B.-T.; Vo, B.-N.; Arulampalam, S. Void probabilities and Cauchy-Schwarz divergence for Generalized Labeled Multi-Bernoulli Models. IEEE Trans. Sig. Process. 2017, 65, 5047–5061. [Google Scholar] [CrossRef]
- Fantacci, C.; Vo, B.-N.; Vo, B.-T.; Battistelli, G.; Chisci, L. Robust fusion for multisensor multiobject tracking. IEEE Signal Process. Lett. 2018, 25, 640–644. [Google Scholar] [CrossRef]
- Li, S.; Yi, W.; Hoseinnezhad, R.; Battistelli, G.; Wang, B.; Kong, L. Robust Distributed Fusion with Labeled Random Finite Sets. IEEE Trans. Signal Process. 2018, 66, 278–293. [Google Scholar] [CrossRef]
- Papi, F.; Kim, D.Y. A particle multi-target tracker for superpositional measurements using labeled random finite sets. IEEE Trans. Signal Process. 2015, 63, 4348–4358. [Google Scholar] [CrossRef]
- Papi, F.; Vo, B.-N.; Vo, B.-T.; Fantacci, C.; Beard, M. Generalized Labeled Multi-Bernoulli Approximation of Multi-Object Densities. IEEE Trans. Signal Process. 2015, 63, 5487–5497. [Google Scholar] [CrossRef]
- Beard, M.; Vo, B.-T.; Vo, B.-N. Bayesian multi-target tracking with merged measurements using labelled random finitesets. IEEE Trans. Signal Process. 2015, 63, 1433–1447. [Google Scholar] [CrossRef]
- Beard, M.; Reuter, S.; Granström, K.; Vo, B.-T.; Vo, B.-N.; Scheel, A. Multiple extended target tracking with labeled random finite sets. IEEE Trans. Signal Process. 2016, 64, 1638–1653. [Google Scholar] [CrossRef]
- Zhu, S.; Liu, W.; Cui, H. Multiple Resolvable GroupsTracking Using the GLMB Filter. Acta Autom. Sin. 2017, 43, 2178–2189. [Google Scholar]
- Liu, W.; Zhu, S.; Wen, C.; Yu, Y. Structure Modeling and Estimation of Multiple Resolvable Group Targets via Graph Theory and Multi-Bernoulli Filter. Automatica 2018, 89, 274–289. [Google Scholar] [CrossRef]
- Goodman, I.; Mahler, R.; Nguyen, H. Mathematics of Data Fusion; Kluwer Academic Publishers: Dordrecht, The Netherlands; Boston, MA, USA; London, UK, 1997. [Google Scholar]
- Mahler, R. An Introduction to Multisource-Multitarget Statistics and its Applications. Lockheed Martin Technical Monograph, 15 March 2000. [Google Scholar]
- Mahler, R. Random set theory for target tracking and identification. In Data Fusion Handbook; Hall, D., Llinas, J., Eds.; CRC Press: Boca Raton, FL, USA, 2001; p. 14. [Google Scholar]
- Guichard, D. An Introduction to Combinatorics and Graph Theory; Whitman College-Creative Commons: Walla Walla, WA, USA, 2014. [Google Scholar]
- Julier, S.; Uhlmann, J.; Durrantwhyte, H. A new method for nonlinear transformation of means and covariances in filters and estimates. IEEE Trans. Autom. Contr. 2000, 45, 477–482. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1. Given the initial sigma point, as shown below: |
| . |
| 2. Sigma parameter point prediction: |
| (1) Matrix parameter , and target existence probability can be seen in Table 2. |
| (2) Other parameters , and can be seen in Table 2. |
| (3) Sigma point parameter update. |
| 3. Get target status ; covariance matrix ; target existence probability seen in Table 2. |
| (1) Initial sigma point |
| , |
| (2) Predictive step |
| (3) Update step |
| Time (s) | Precision (m) | |||
|---|---|---|---|---|
| GLMB | Gibbs GLMB | GLMB | Gibbs GLMB | |
| Data | 264.5118 | 43.4962 | 28.8332 | 28.0190 |
| Time (s) | Precision (m) | |||
|---|---|---|---|---|
| GLMB | Gibbs GLMB | GLMB | Gibbs GLMB | |
| Data | 284.1740 | 39.1331 | 23.7307 | 19.4597 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, W.; Chi, Y. Resolvable Group State Estimation with Maneuver Based on Labeled RFS and Graph Theory. Sensors 2019, 19, 1307. https://doi.org/10.3390/s19061307
Liu W, Chi Y. Resolvable Group State Estimation with Maneuver Based on Labeled RFS and Graph Theory. Sensors. 2019; 19(6):1307. https://doi.org/10.3390/s19061307
Chicago/Turabian StyleLiu, Weifeng, and Yudong Chi. 2019. "Resolvable Group State Estimation with Maneuver Based on Labeled RFS and Graph Theory" Sensors 19, no. 6: 1307. https://doi.org/10.3390/s19061307
APA StyleLiu, W., & Chi, Y. (2019). Resolvable Group State Estimation with Maneuver Based on Labeled RFS and Graph Theory. Sensors, 19(6), 1307. https://doi.org/10.3390/s19061307