An IoT Surveillance System Based on a Decentralised Architecture

 ,
,  ,
, 
Abstract
:1. Introduction
- We proposed a decentralized architecture for reducing system response time and for increasing system scalability;
- We proposed a distributed protocol based on a well known machine-to-machine (M2M) protocol called message queuing telemetry transport (MQTT) [11];
- We defined three layers and for each layer we defined the role of each element;
- We designed and implemented each component of the system such as unmanned ground vehicle (UGV) and smart cameras;
- We implemented the application for interfacing human to the system by defining the human-to-machine (H2M) interfaces;
- We realized a testbed based on a real scenario.
2. Related Works
2.1. IoT Domain
2.2. H2H, M2M, H2M Domain
2.3. Mist Computation Domain
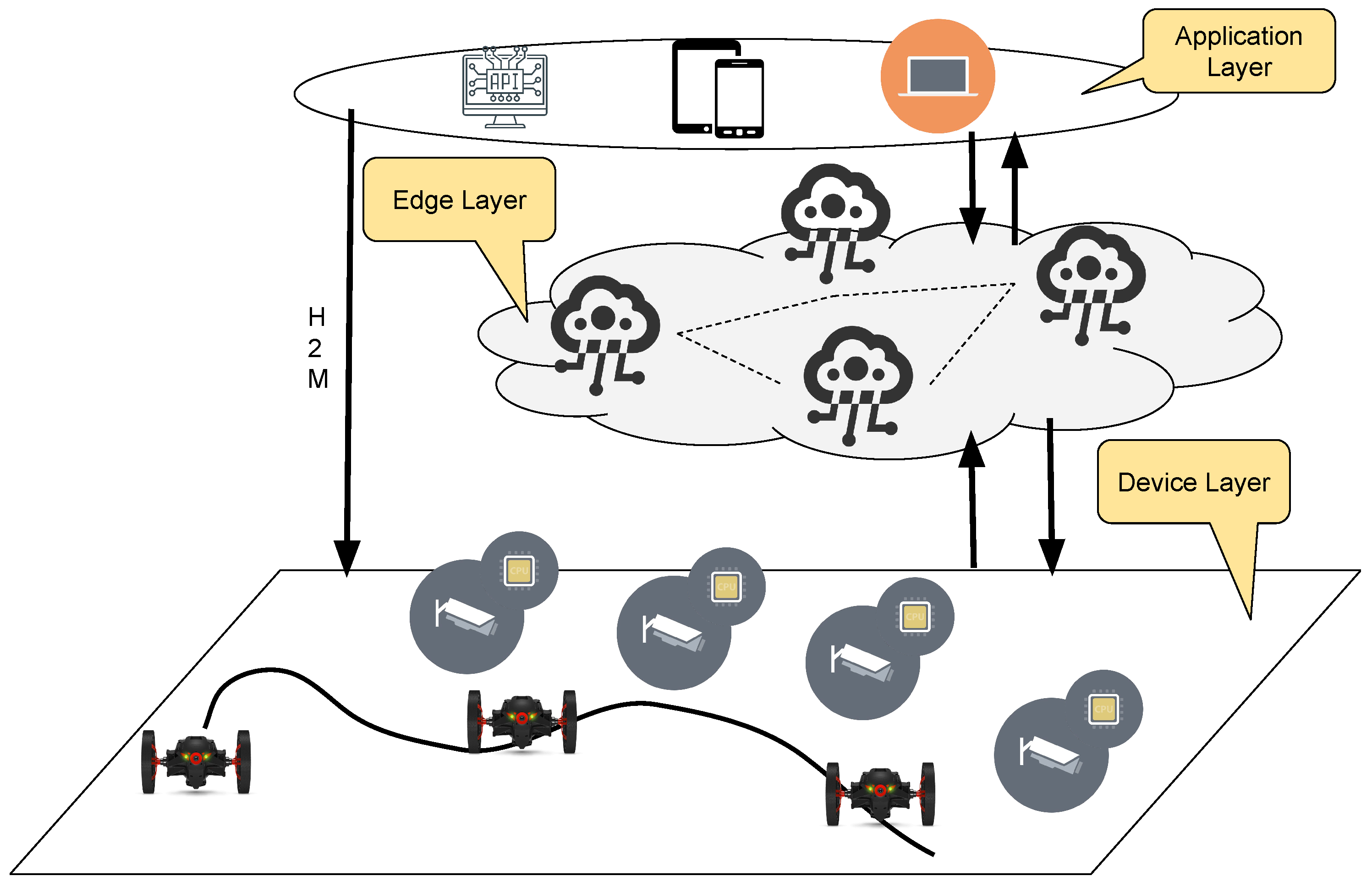
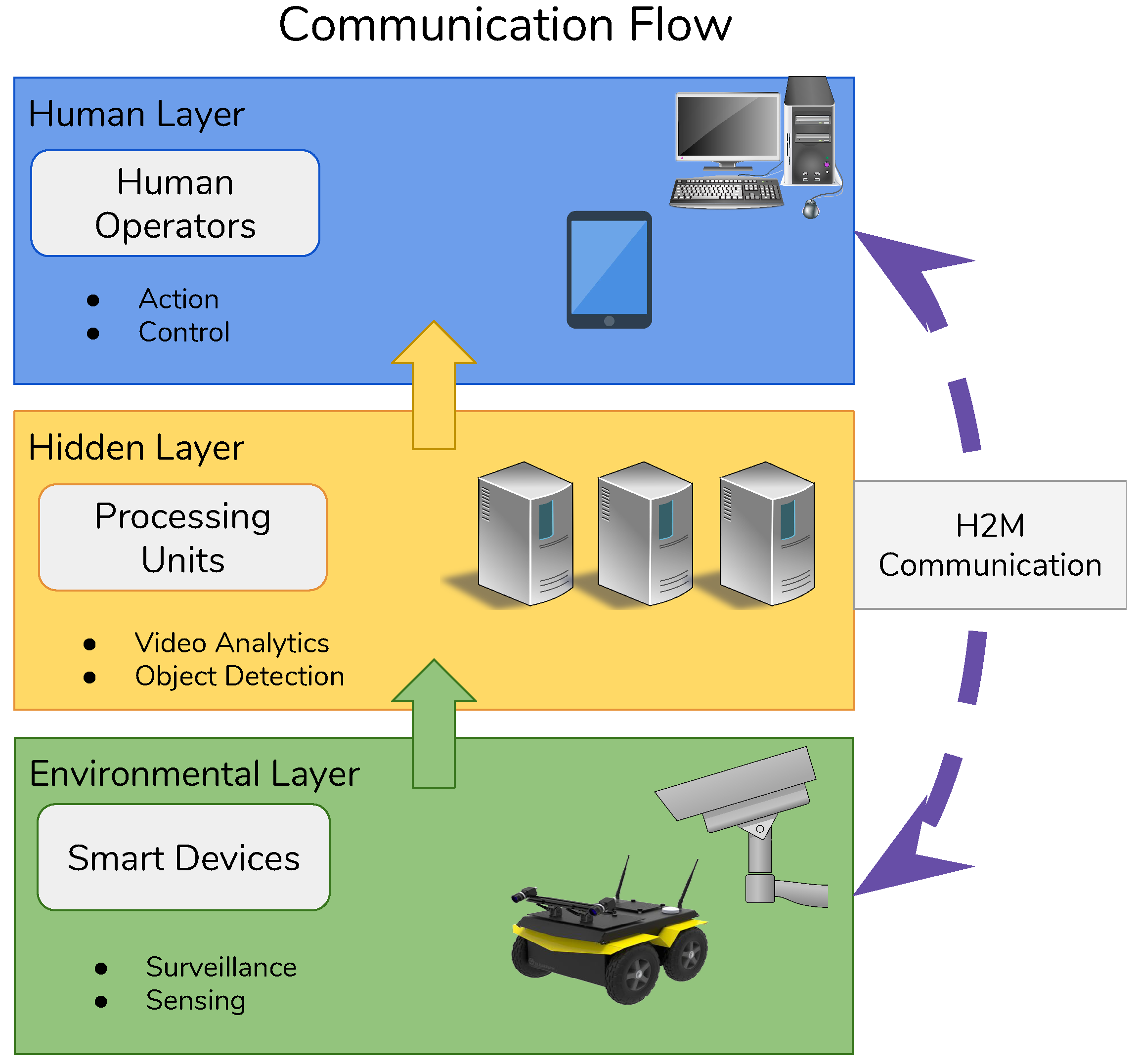
3. Proposed Architecture
- Environmental layer;
- Hidden layer;
- Human layer.
3.1. The Environmental Layer
3.2. The Human Layer
3.3. The Hidden Layer
3.4. Architecture Elements
- Smart IP cameras: those devices can elaborate captured data, and if requested they can send to the higher layer pictures or video streaming. Commonly, IP cameras only sent results of the elaboration such as detected objects, location and alarms;
- unmanned ground vehicles (UGVs) devices: they are eligible for doing path-rolling in the environment and for doing focused researches on some specific location. They move in the environment autonomously by following a specific path. In case of needs, they can switch on free movements or pass under the control of a human by using H2M interfaces;
- sensor devices: they are installed in the area to be monitored, and they supply specific information such as presences or temperature, light intensity and so on;
3.4.1. Edge Computing
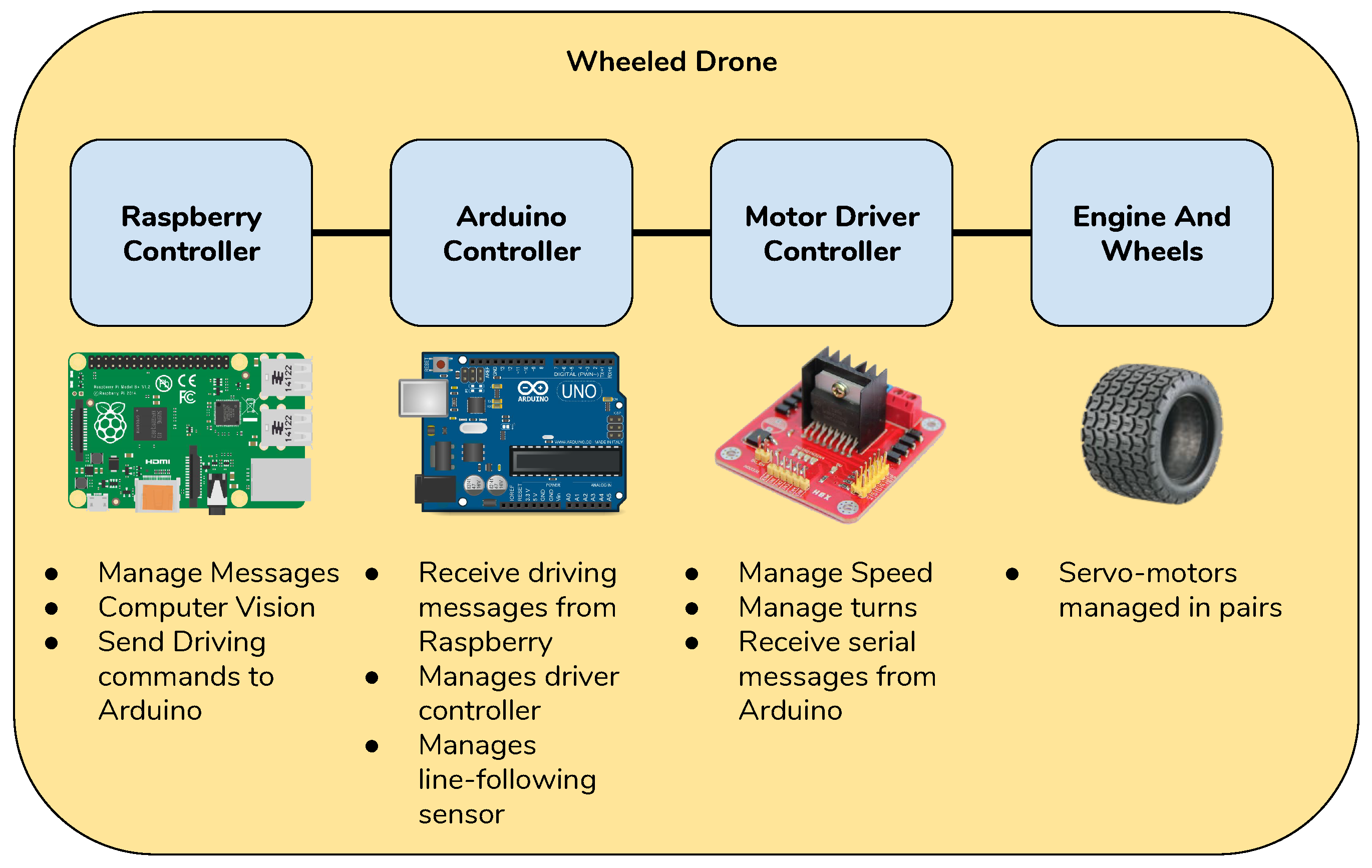
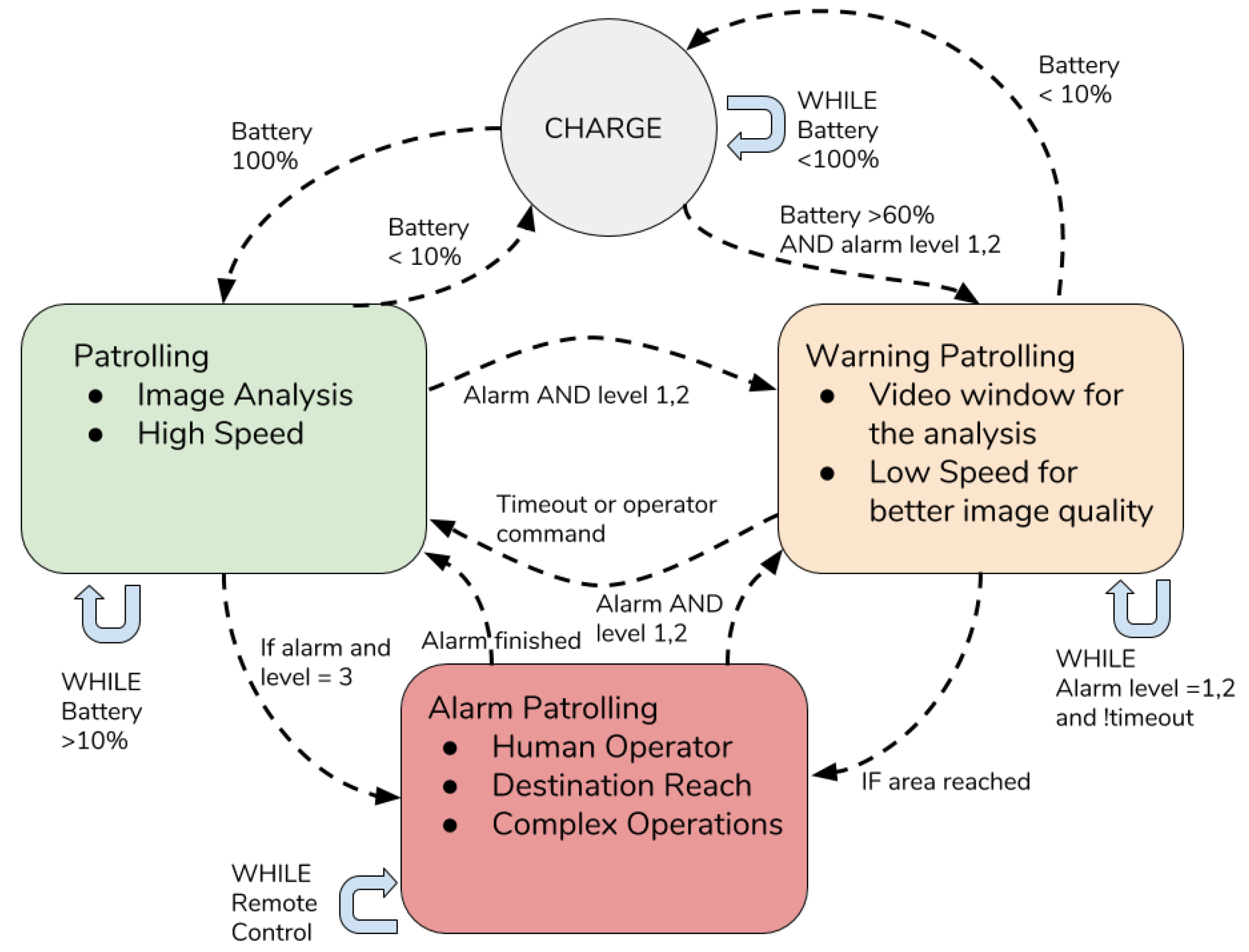
3.4.2. Unmanned Ground Vehicle (UGV)
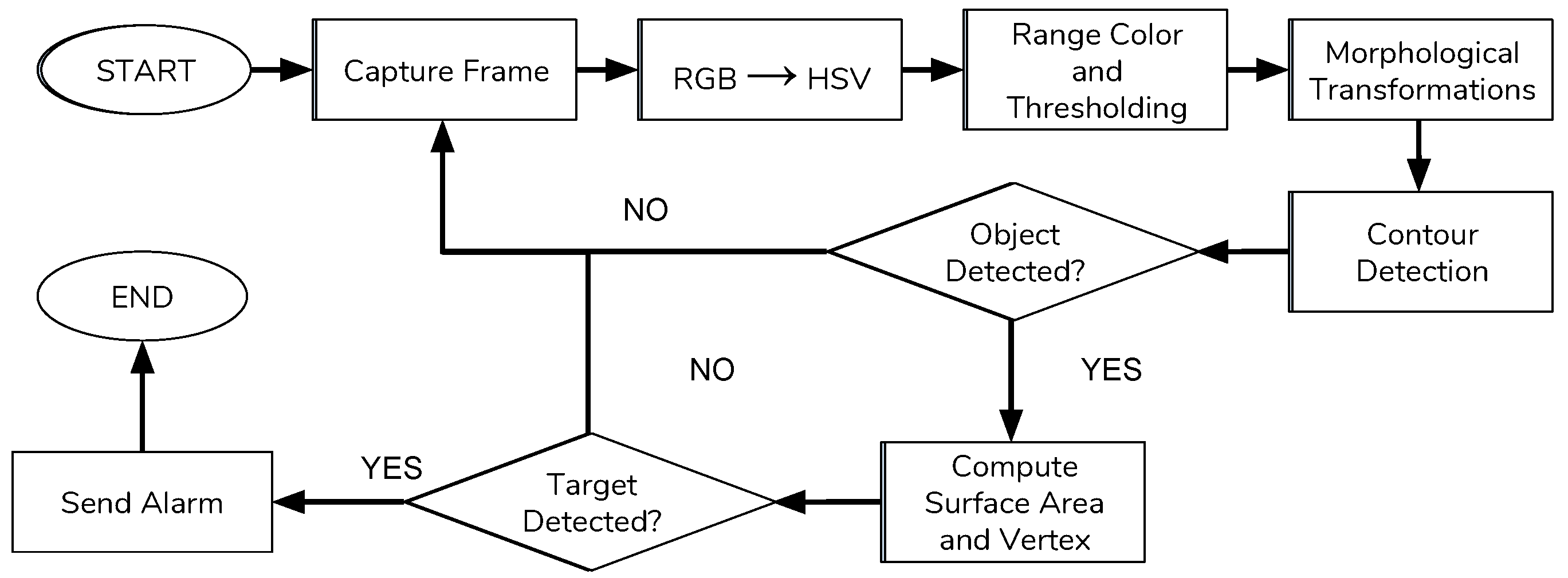
3.4.3. Smart Camera Devices
- Space colour conversion;
- Colour and threshold definition;
- Morphological transformation;
- Outline detection.
4. Communication Issues
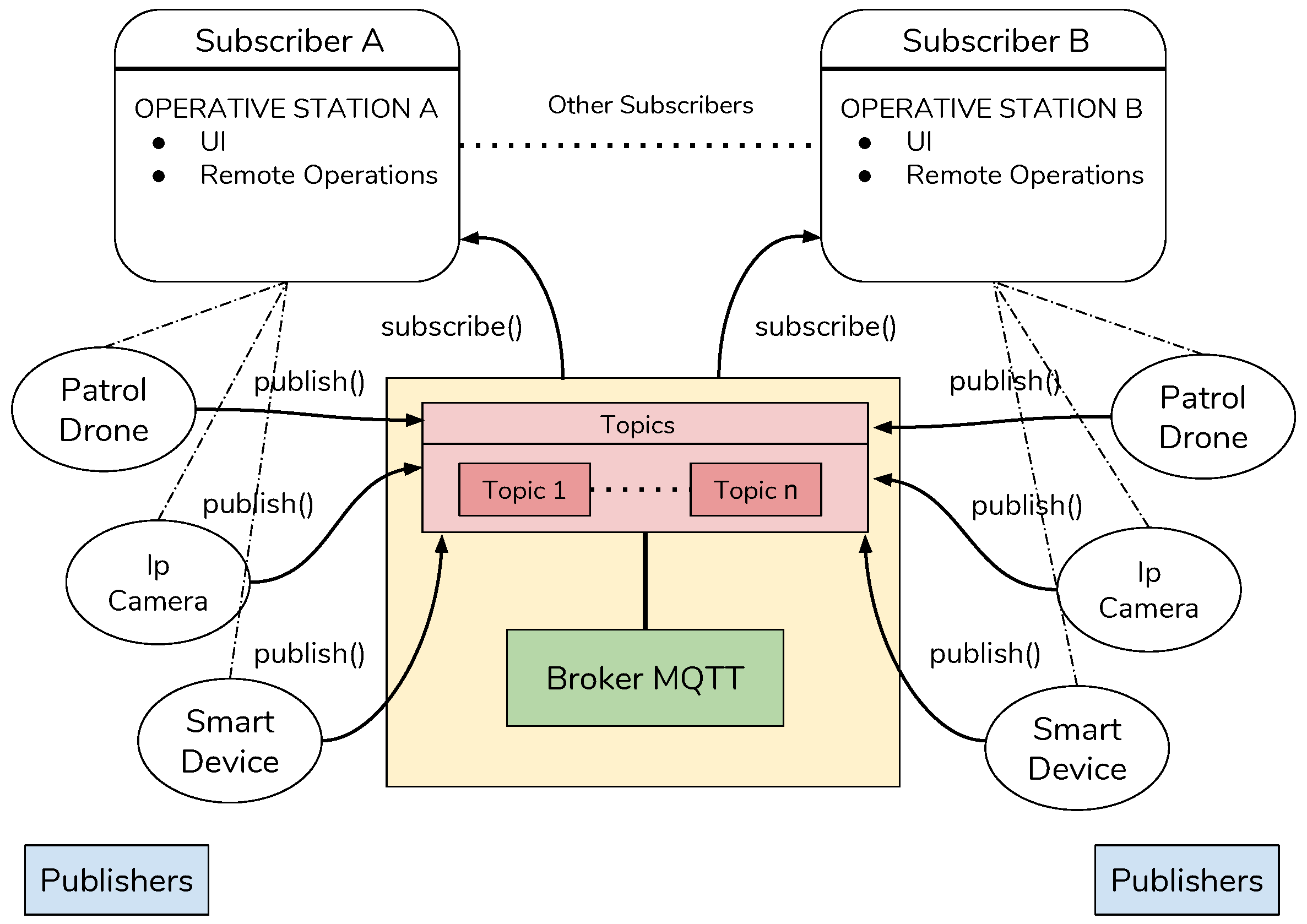
- The broker: it has the main goal to manage the messages coming from publishers and notify to the subscribers about the contents received. Several policies exist to manage the messages by the broker. In this work, the broker is placed in the edge layer and it can be reached by each node of the network. The broker we used is the MQTT Paho which is an open source broker available for free [38]. It has been installed in a server of the Telecommunication Laboratory in the University of Calabria, and it is available 24/7.
- Publishers and subscribers: In this work all the entities on different layers are both publisher and subscribers of some topic. To better depict the behavior of the whole system some of the messages and topics are herein described:
- –
- Status: status messages are sent by all devices involved in the environment. It contains the state of the device, the time-to-live, current operations. This message is sent periodically by devices. The destination of this message is the edge node that extracts data and stores it;
- –
- Data upload: data message is sent by the devices which are involved in sensor activities;
- –
- Commands to drone: messages that are sent to a specific drone are published on three different topics: remote control topic, surveillance topic and camera alert topic. On the remote control topic only messages to maneuver the drone from a remote user are sent. These messages are then encapsulated in a serial communication protocol and sent to the Arduino controller that manages the movements of the drone. The messages are described in Table 2. Each message is composed by a mandatory id and command and optional directions and options. The presence of the direction and options field depends on the type of command.
- –
- Commands to camera: the commands that can be received by a camera are useful to focus on some areas of interest where some anomaly is detected. These commands include some movement of the camera if the camera is not fixed, the resolution change of the video stream when more detailed frames are needed and also the chance to take a picture for high resolution analysis. These messages, as for the drone, are received on the specific topic camera control. The messages from each camera are then analyzed from the Raspberry controller which also send the command to the connected camera through the camera api interface. The commands that can be executed from a camera are shown in Table 3 and are similar to the drone commands;
- –
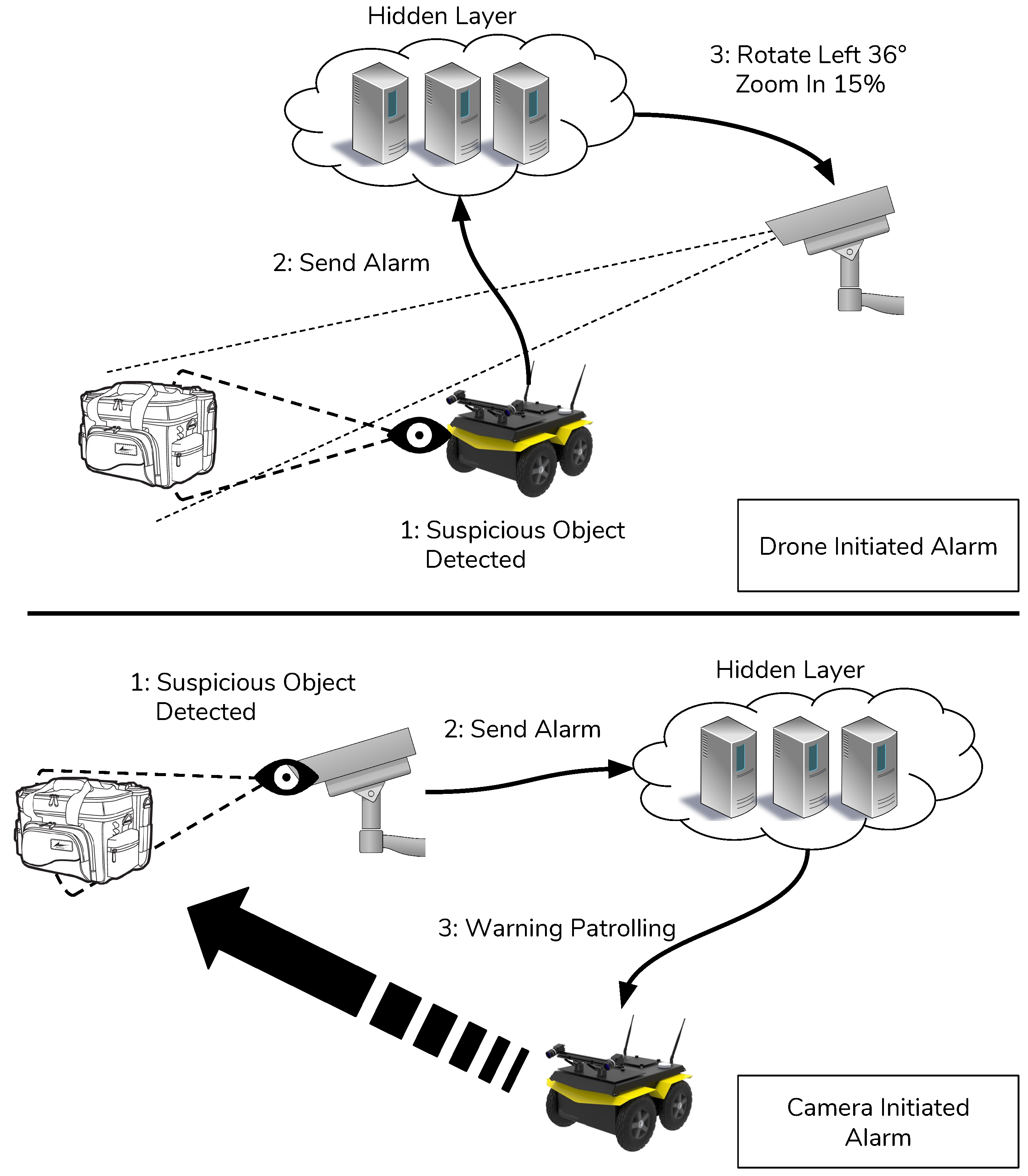
- Anomaly detected: when a camera or a drone detects something suspicious it notifies the hidden layer with a message published on the topic anomaly detection. When this message is received by the hidden layer it starts the coordination of other devices to focus the attention on the area of interest reducing in this way the time necessary to respond to a warning situation. These messages contain the device id that detected the anomaly and the position of the area of interest with a time-stamp label. The position is necessary for the hidden layer to coordinate in the right way the other devices. For example if an anomaly is detected in an area with two cameras that can change their angle then the position is necessary to send the right adjustment commands to them in order to focus correctly on the anomaly.
5. Performance Evaluation
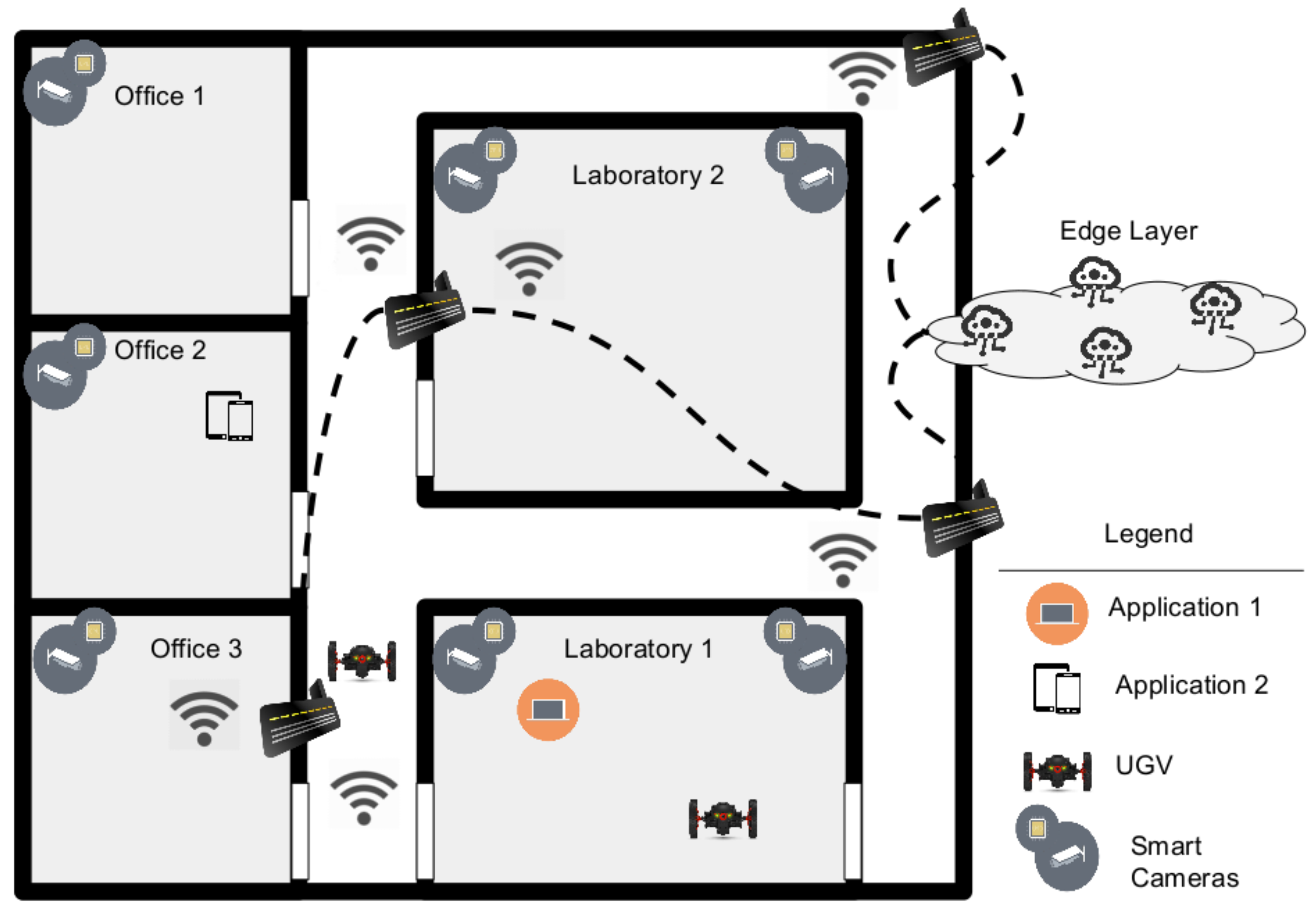
5.1. Test Bed Description
Detailed Configuration
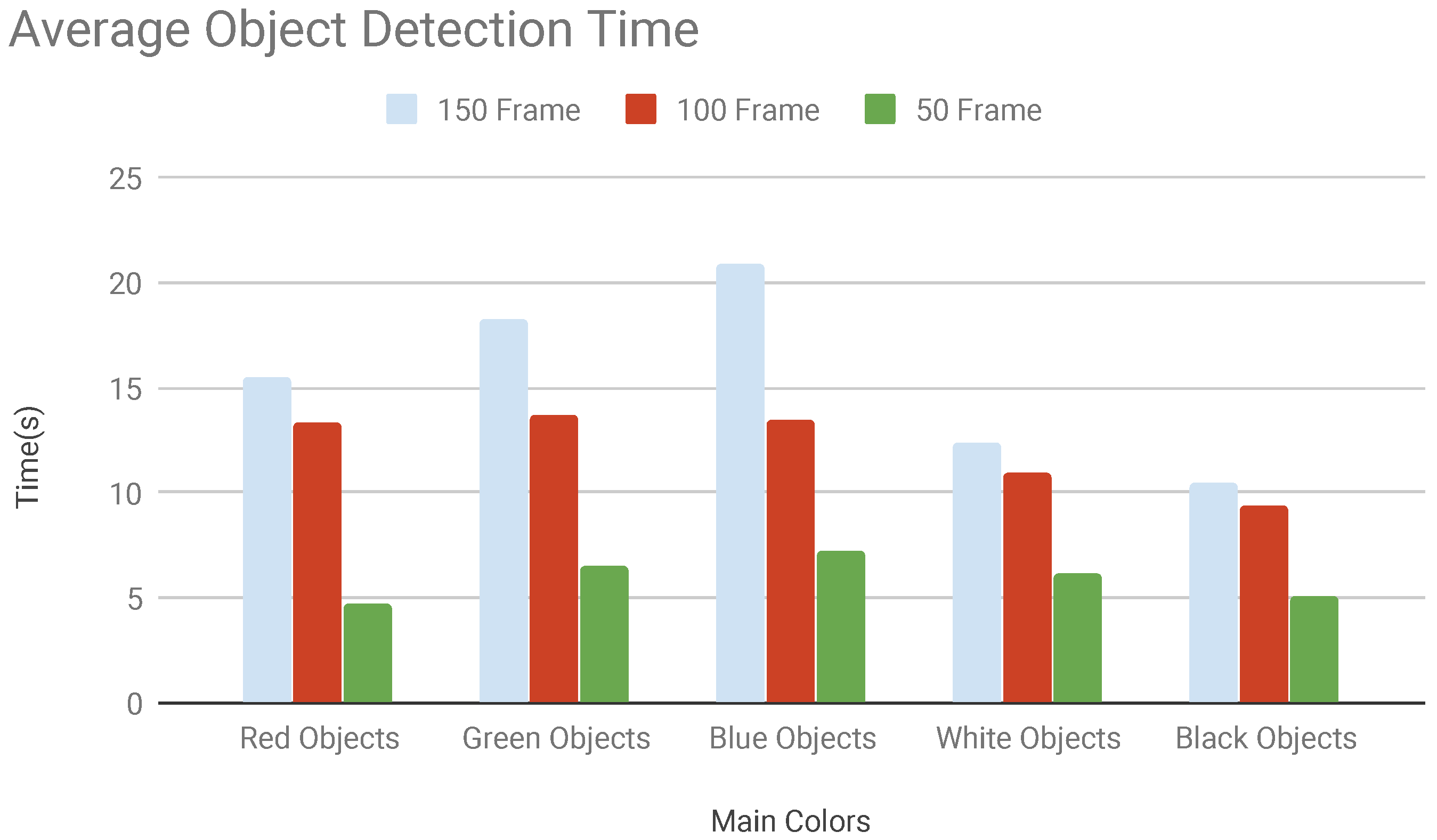
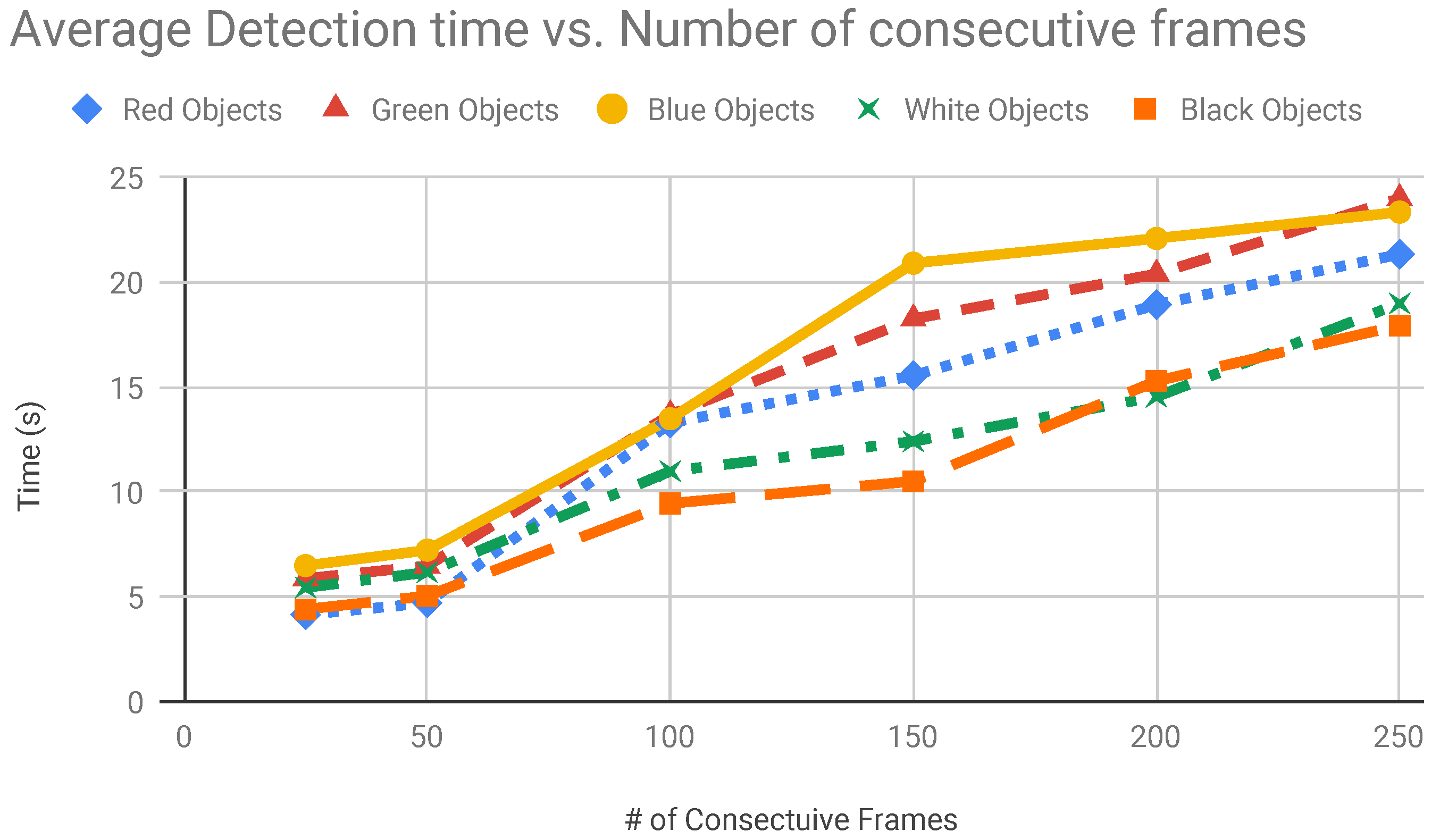
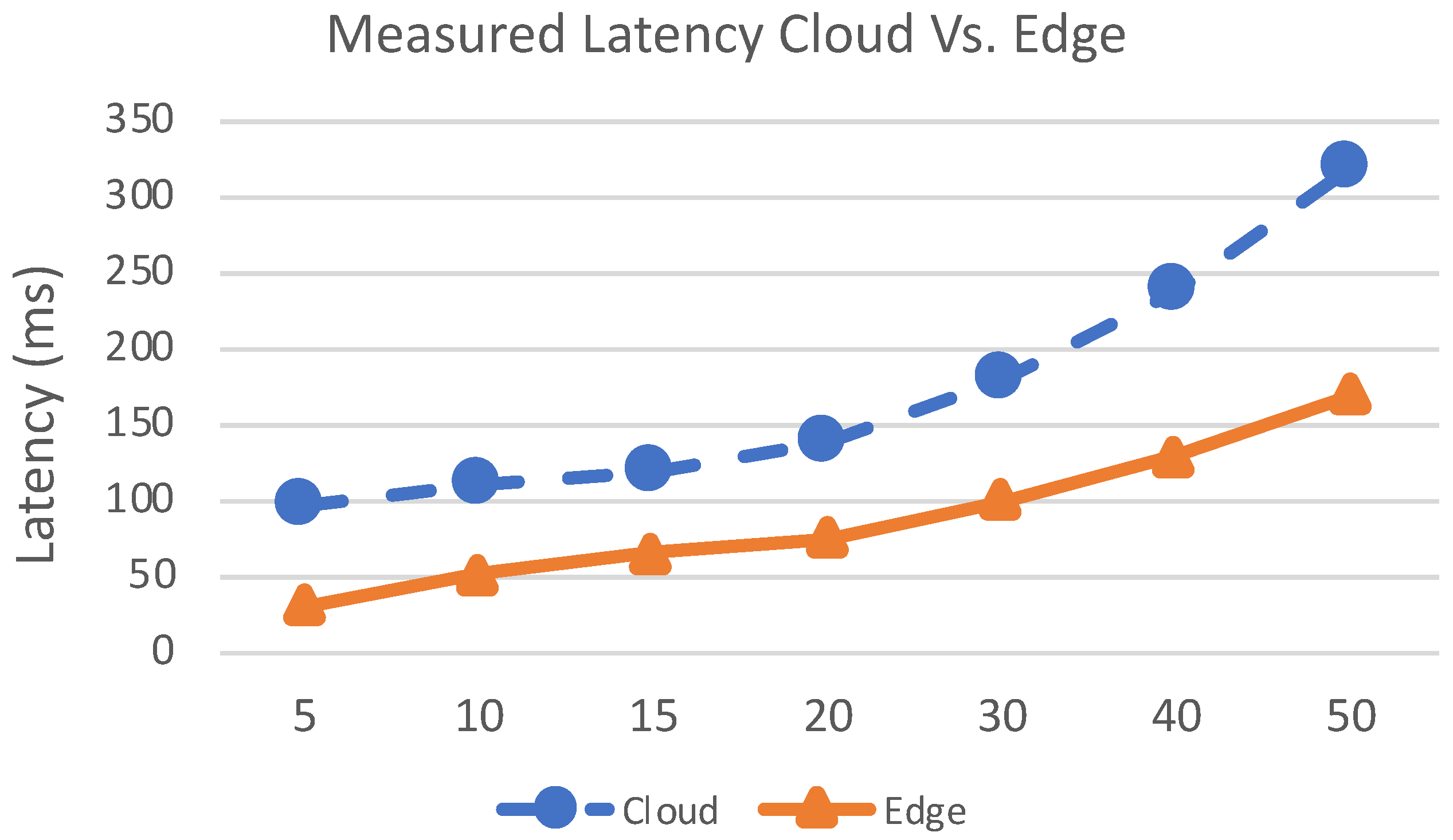
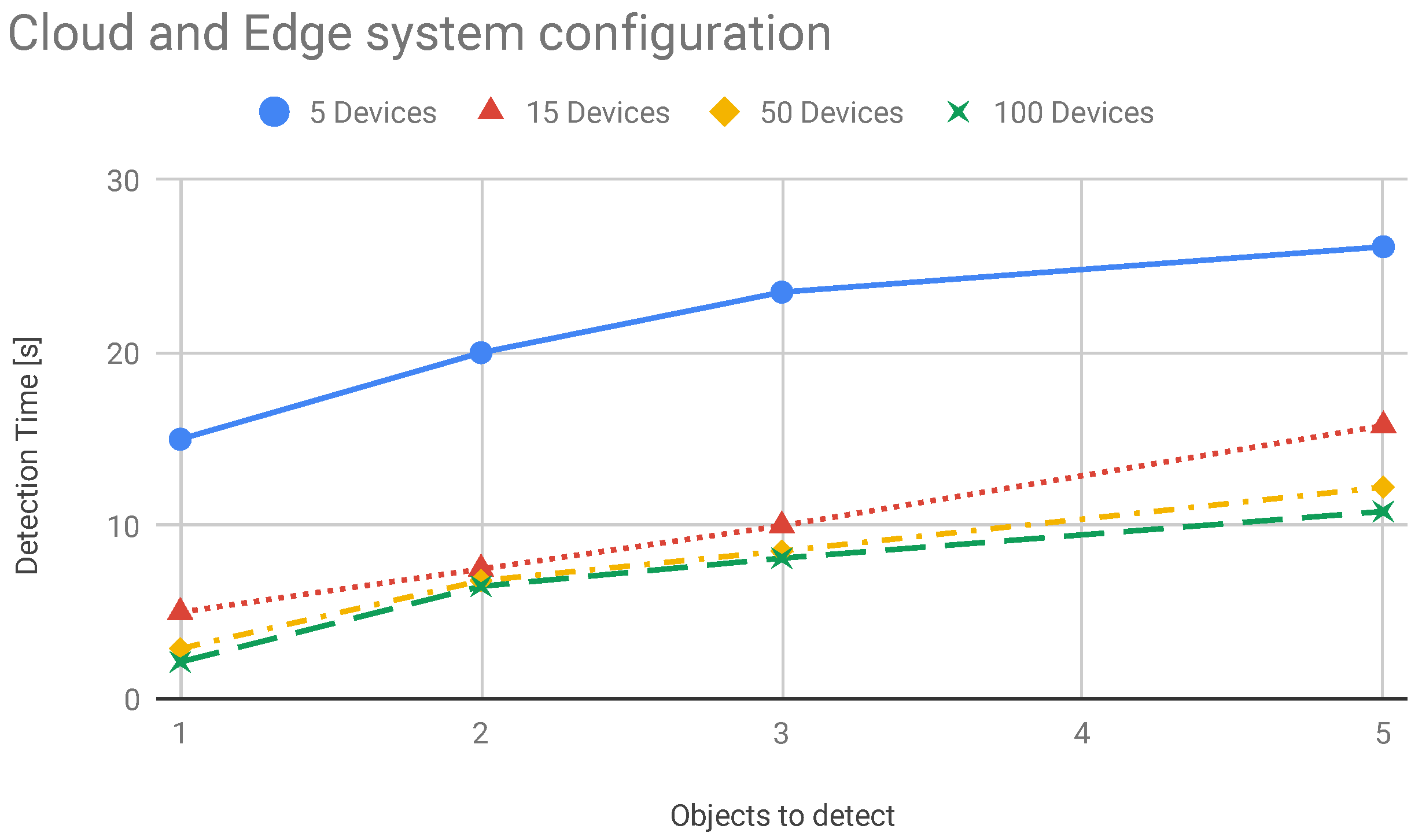
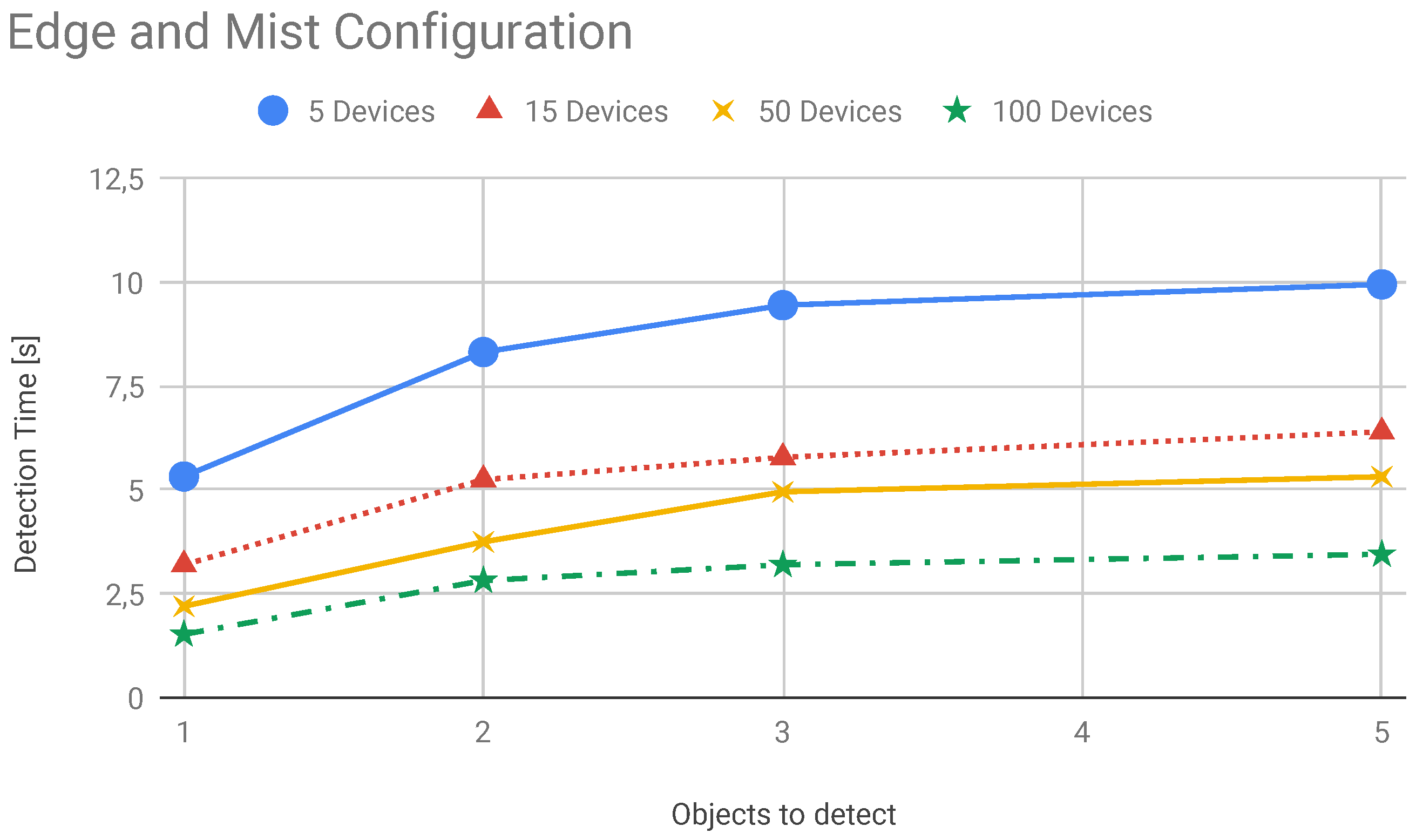
5.2. First Campaign: Detection Time
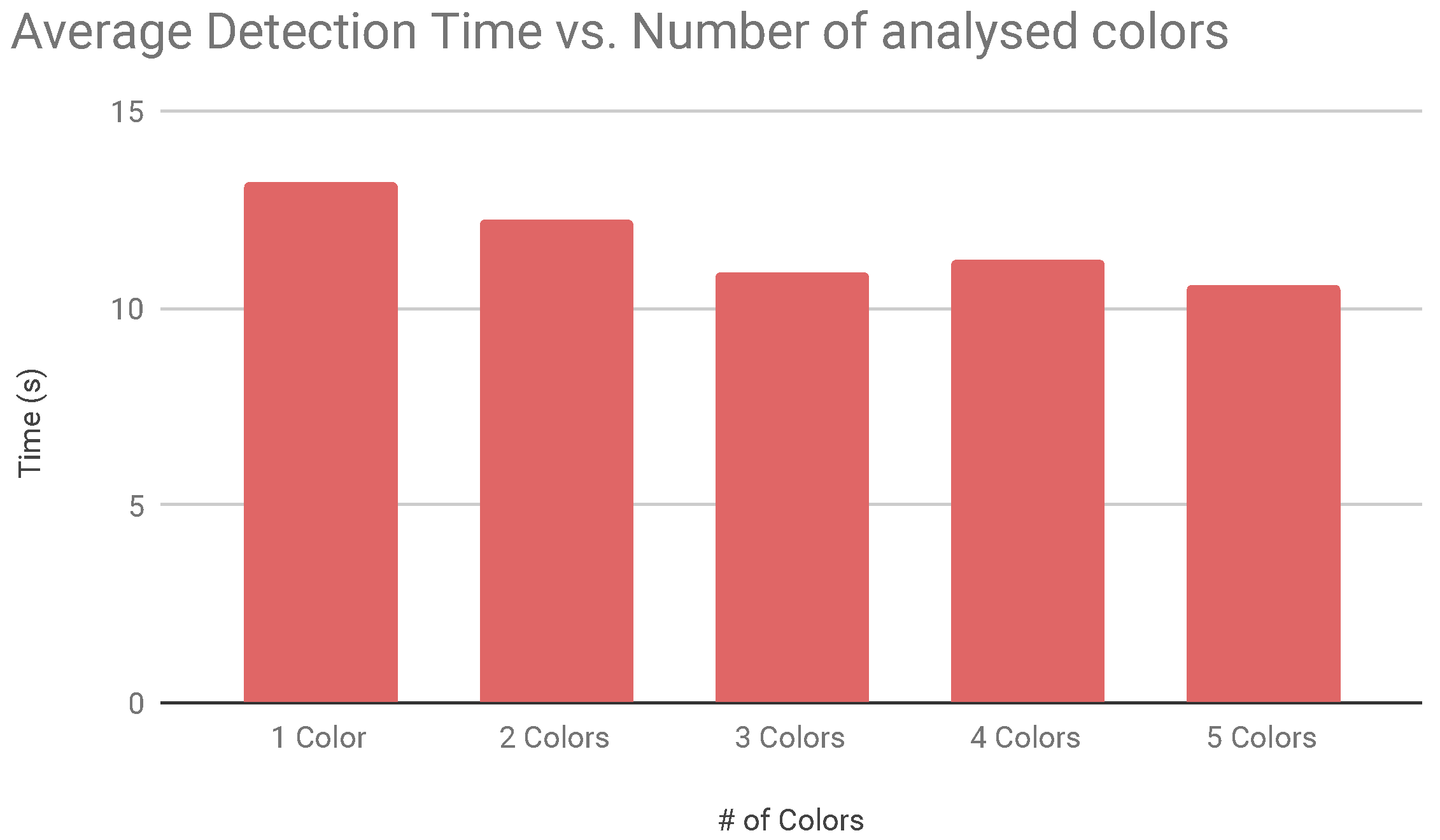
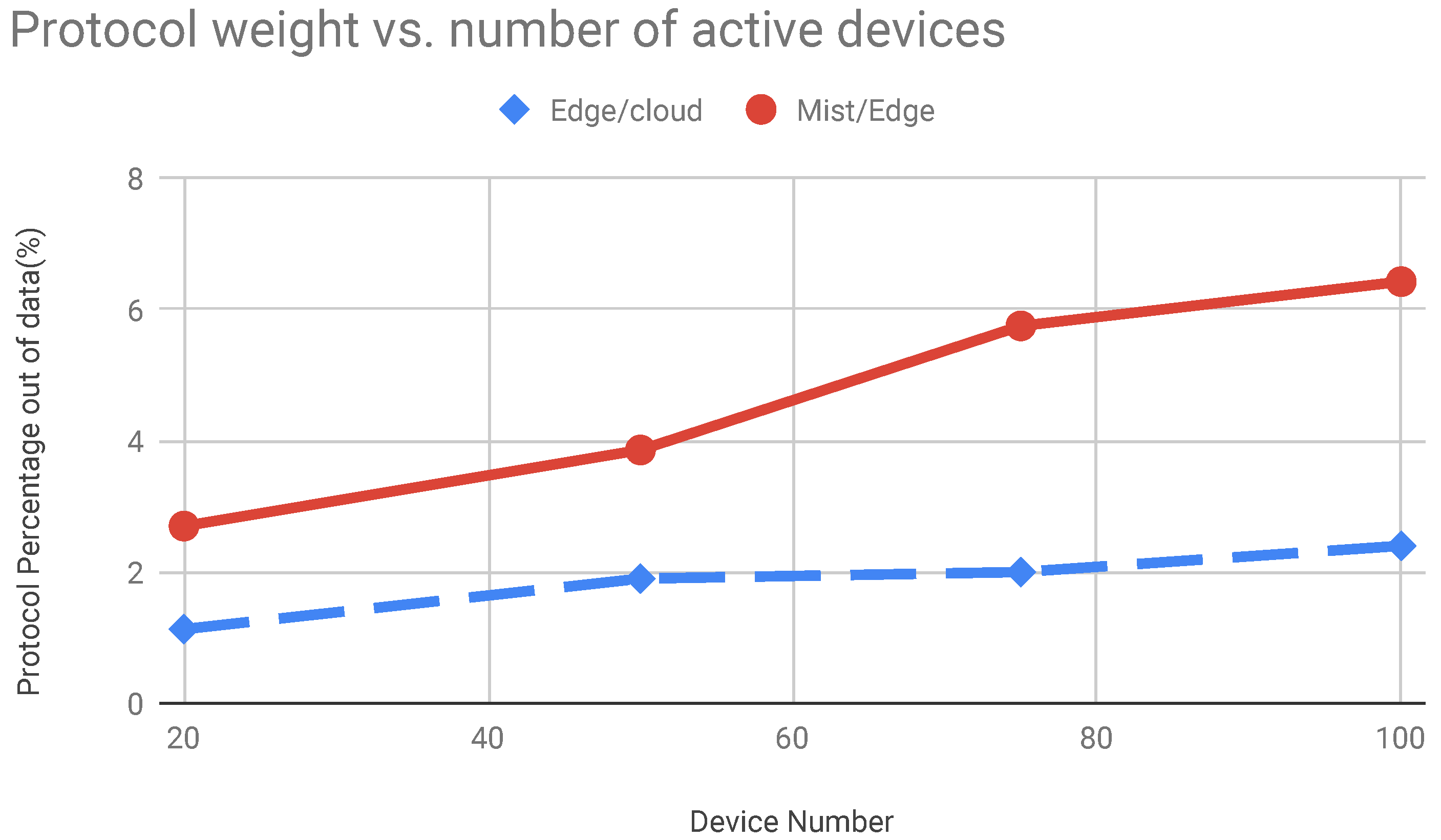
5.3. Second Campaign: Working Load
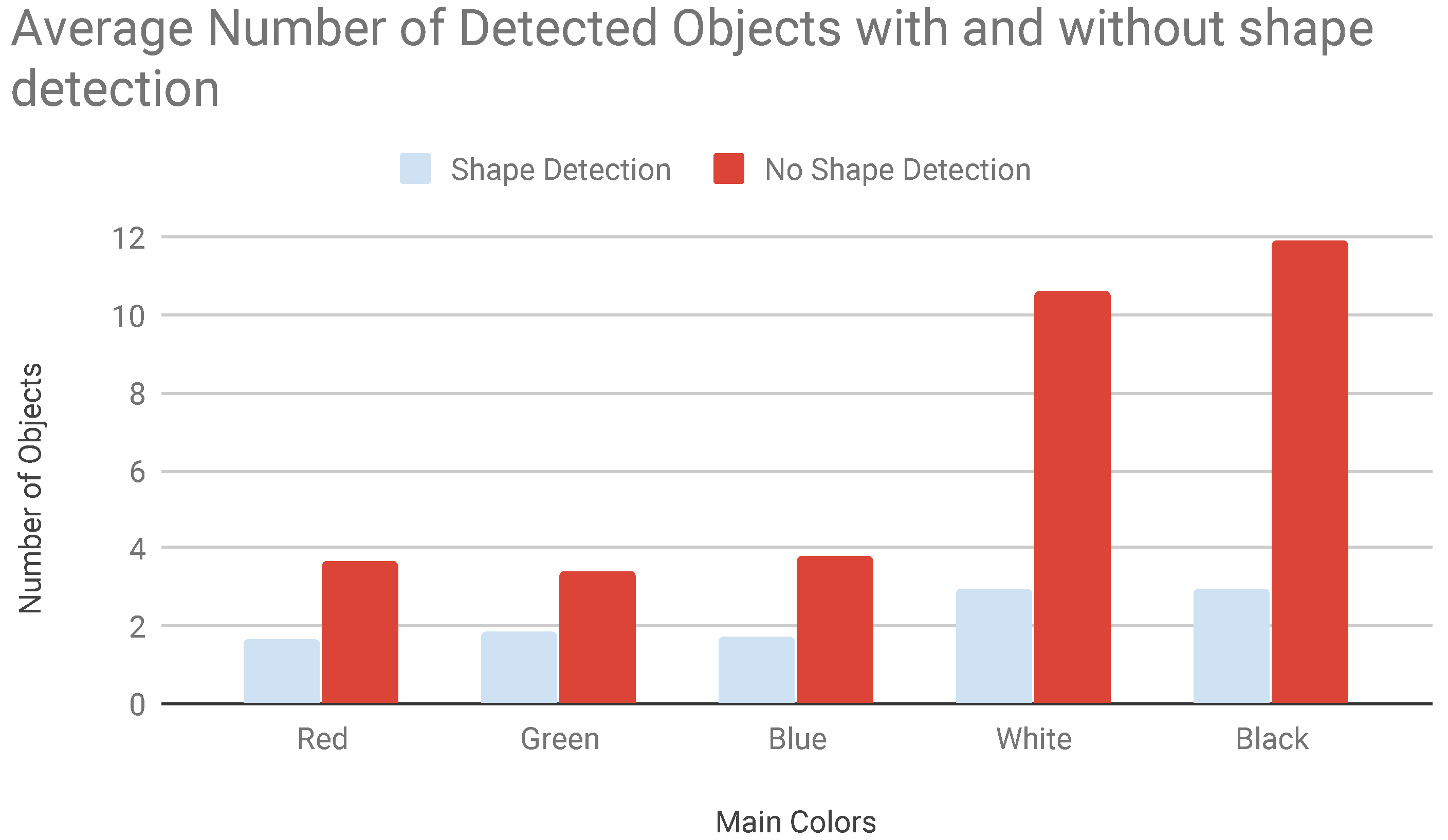
5.4. Third Campaign: Shape Detection and False Positives
System Comparison
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| IoT | internet of things |
| FSM | finite state machine |
| CV | computer vision |
| MQTT | message queuing telemetry transport |
| H2M | human-to-machine |
| M2M | machine-to-machine |
| UGV | unmanned ground vehicle |
| OS | operating system |
| ANN | artificial neural network |
| AP | access point |
| LTE | long term evolution |
| LTE-A | long term evolution-advanced |
| MTC | machine-type communication |
| HTC | human-type communication |
| LDWS | lane departure warning system |
| OFDMA | orthogonal frequency-division multiple access |
| H2H | human-to-human |
| QoS | quality of service |
| CPS | cyber-physical system |
| ANN | artificial neural network |
| IoT | internet of things |
| TTL | transistor–transistor logic |
| SDN | software defined networking |
| FCFS | first come first served |
| AP | access point |
References
- Li, X.; Shi, Y. Computer Vision Imaging Based on Artificial Intelligence. In Proceedings of the 2018 International Conference on Virtual Reality and Intelligent Systems (ICVRIS), Changsha, China, 10–11 August 2018; pp. 22–25. [Google Scholar]
- Al-Kaff, A.; Martín, D.; García, F.; de la Escalera, A.; Armingol, J.M. Survey of computer vision algorithms and applications for unmanned aerial vehicles. Expert Syst. Appl. 2018, 92, 447–463. [Google Scholar] [CrossRef]
- Leo, M.; Medioni, G.; Trivedi, M.; Kanade, T.; Farinella, G.M. Computer vision for assistive technologies. Comput. Vis. Image Underst. 2017, 154, 1–15. [Google Scholar] [CrossRef]
- Preden, J.S.; Tammemäe, K.; Jantsch, A.; Leier, M.; Riid, A.; Calis, E. The benefits of self-awareness and attention in fog and mist computing. Computer 2015, 48, 37–45. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Huo, Y.; Dong, X.; Lu, T.; Xu, W.; Yuen, M. Distributed and multi-layer UAV network for the next-generation wireless communication. arXiv, 2018; arXiv:1805.01534. [Google Scholar]
- Huo, Y.; Dong, X.; Xu, W.; Yuen, M. Cellular and WiFi Co-design for 5G User Equipment. In Proceedings of the 2018 IEEE 5G World Forum (5GWF), Silicon Valley, CA, USA, 9–11 July 2018; pp. 256–261. [Google Scholar]
- Popescu, D.; Dragana, C.; Stoican, F.; Ichim, L.; Stamatescu, G. A collaborative UAV-WSN network for monitoring large areas. Sensors 2018, 18, 4202. [Google Scholar] [CrossRef] [PubMed]
- Sharma, V.; Choudhary, G.; Ko, Y.; You, I. Behavior and Vulnerability Assessment of Drones-Enabled Industrial Internet of Things (IIoT). IEEE Access 2018, 6, 43368–43383. [Google Scholar] [CrossRef]
- Kim, H.; Ben-Othman, J. A Collision-free Surveillance System using Smart UAVs in Multi Domain IoT. IEEE Commun. Lett. 2018, 22, 2587–2590. [Google Scholar] [CrossRef]
- Mqtt Website. Available online: http://mqtt.org/ (accessed on 20 June 2018).
- Lee, I.; Lee, K. The Internet of Things (IoT): Applications, investments, and challenges for enterprises. Bus. Horiz. 2015, 58, 431–440. [Google Scholar] [CrossRef]
- Beevi, M.J. A fair survey on Internet of Things (IoT). In Proceedings of the International Conference on Emerging Trends in Engineering, Technology and Science (ICETETS), Pudukkottai, India, 24–26 February 2016; pp. 1–6. [Google Scholar]
- Dragomir, D.; Gheorghe, L.; Costea, S.; Radovici, A. A Survey on Secure Communication Protocols for IoT Systems. In Proceedings of the 2016 International Workshop on Proceedings of the Secure Internet of Things (SIoT), Heraklion, Greece, 26–30 September 2016; pp. 47–62. [Google Scholar]
- Samie, F.; Bauer, L.; Henkel, J. IoT technologies for embedded computing: A survey. In Proceedings of the Eleventh IEEE/ACM/IFIP International Conference on Hardware/Software Codesign and System Synthesis, Pittsburgh, PA, USA, 2–7 October 2016; p. 8. [Google Scholar]
- Municio, E.; Marquez-Barja, J.; Latré, S.; Vissicchio, S. Whisper: Programmable and Flexible Control on Industrial IoT Networks. Sensors 2018, 18, 4048. [Google Scholar] [CrossRef] [PubMed]
- Park, J.H.; Kim, H.S.; Kim, W.T. DM-MQTT: An Efficient MQTT Based on SDN Multicast for Massive IoT Communications. Sensors 2018, 18, 3071. [Google Scholar] [CrossRef]
- De Andrade, T.P.; Astudillo, C.A.; da Fonseca, N.L. Allocation of control resources for machine-to-machine and human-to-human communications over LTE/LTE-A networks. IEEE Internet Things J. 2016, 3, 366–377. [Google Scholar] [CrossRef]
- Navarro, J. Human–Machine interaction theories and lane departure warnings. Theor. Issues Ergon. Sci. 2017, 18, 519–547. [Google Scholar] [CrossRef]
- Aragão, D.; Vieira, D.; de Castro, M.F. A mechanism to control the congestion in machine-to-machine communication in LTE-A networks. In Proceedings of the 2017 IEEE Symposium on Computers and Communications (ISCC), Heraklion, Greece, 3–6 July 2017; pp. 794–797. [Google Scholar]
- Li, M.; Wei, J.; Zheng, X.; Bolton, M.L. A Formal Machine–Learning Approach to Generating Human–Machine Interfaces from Task Models. IEEE Trans. Hum.-Mach. Syst. 2017, 47, 822–833. [Google Scholar] [CrossRef]
- Abebe, A.T.; Kang, C.G. Overlaying machine-to-machine (M2M) traffic over human-to-human (H2H) traffic in OFDMA system: Compressive-sensing approach. In Proceedings of the 2016 International Conference on Selected Topics in Mobile & Wireless Networking (MoWNeT), Cairo, Egypt, 11–13 April 2016; pp. 1–6. [Google Scholar]
- Dighriri, M.; Alfoudi, A.S.D.; Lee, G.M.; Baker, T. Data traffic model in machine to machine communications over 5G network slicing. In Proceedings of the 2016 9th International Conference on Developments in eSystems Engineering (DeSE), Liverpool, UK, 31 August–2 September 2016; pp. 239–244. [Google Scholar]
- Giang, N.K.; Lea, R.; Blackstock, M.; Leung, V.C. Fog at the edge: Experiences building an edge computing platform. In Proceedings of the 2018 IEEE International Conference on Edge Computing (EDGE), San Francisco, CA, USA, 2–7 July 2018; pp. 9–16. [Google Scholar]
- Fan, K.; Pan, Q.; Wang, J.; Liu, T.; Li, H.; Yang, Y. Cross-Domain Based Data Sharing Scheme in Cooperative Edge Computing. In Proceedings of the 2018 IEEE International Conference on Edge Computing (EDGE), San Francisco, CA, USA, 2–7 July 2018; pp. 87–92. [Google Scholar]
- Song, Y.; Yau, S.S.; Yu, R.; Zhang, X.; Xue, G. An Approach to QoS-based Task Distribution in Edge Computing Networks for IoT Applications. In Proceedings of the 2017 IEEE International Conference on Edge Computing (EDGE), Honolulu, HI, USA, 25–30 June 2017; pp. 32–39. [Google Scholar]
- Gosain, A.; Seskar, I. GENI wireless testbed: An open edge ecosystem for ubiquitous computing applications. In Proceedings of the 2017 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Kona, HI, USA, 13–17 March 2017; pp. 54–56. [Google Scholar]
- Alrowaily, M.; Lu, Z. Secure Edge Computing in IoT Systems: Review and Case Studies. In Proceedings of the 2018 IEEE/ACM Symposium on Edge Computing (SEC), Seattle, WA, USA, 25–27 October 2018; pp. 440–444. [Google Scholar]
- Dolui, K.; Datta, S.K. Comparison of edge computing implementations: Fog computing, cloudlet and mobile edge computing. In Proceedings of the Global Internet of Things Summit (GIoTS), Geneva, Switzerland, 6–9 June 2017; pp. 1–6. [Google Scholar]
- Vasconcelos, D.; Severino, V.; Neuman, J.; Andrade, R.; Maia, M. Bio-inspired model for data distribution in Fog and Mist computing. In Proceedings of the 2018 IEEE 42nd Annual Computer Software and Applications Conference (COMPSAC), Tokyo, Japan, 23–27 July 2018; pp. 777–782. [Google Scholar]
- Lee, K.; Lee, C.; Hong, C.H.; Yoo, C. Enhancing the Isolation and Performance of Control Planes for Fog Computing. Sensors 2018, 18, 3267. [Google Scholar] [CrossRef]
- Hong, C.H.; Lee, K.; Kang, M.; Yoo, C. qCon: QoS-Aware Network Resource Management for Fog Computing. Sensors 2018, 18, 3444. [Google Scholar] [CrossRef] [PubMed]
- Martínez-del Rincón, J.; Herrero-Jaraba, J.E.; Gómez, J.R.; Orrite-Urunuela, C. Automatic left luggage detection and tracking using multi-camera ukf. In Proceedings of the 9th IEEE International Workshop on Performance Evaluation in Tracking and Surveillance (PETS’06), New York, NY, USA, 18 June 2006; pp. 59–66. [Google Scholar]
- Mahadevan, V.; Li, W.; Bhalodia, V.; Vasconcelos, N. Anomaly detection in crowded scenes. In Proceedings of the 2010 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), San Francisco, CA, USA, 13–18 June 2010; pp. 1975–1981. [Google Scholar]
- Zaheer, Z.; Usmani, A.; Khan, E.; Qadeer, M.A. Aerial surveillance system using UAV. In Proceedings of the Thirteenth International Conference on Wireless and Optical Communications Networks (WOCN), Hyderabad, India, 21–23 July 2016; pp. 1–7. [Google Scholar]
- Liao, H.H.; Chang, J.Y.; Chen, L.G. A localized approach to abandoned luggage detection with foreground-mask sampling. In Proceedings of the AVSS’08 Fifth International Conference on Advanced Video and Signal Based Surveillance, Santa Fe, NM, USA, 1–3 September 2008; pp. 132–139. [Google Scholar]
- Yassein, M.B.; Shatnawi, M.Q.; Aljwarneh, S.; Al-Hatmi, R. Internet of Things: Survey and open issues of MQTT protocol. In Proceedings of the 2017 International Conference on Engineering & MIS (ICEMIS), Monastir, Tunisia, 8–10 May 2017; pp. 1–6. [Google Scholar]
- MQTT. Available online: https://www.eclipse.org/paho/ (accessed on 14 January 2018).
- Jain, P.; Manweiler, J.; Roy Choudhury, R. Overlay: Practical mobile augmented reality. In Proceedings of the 13th Annual International Conference on Mobile Systems, Applications, and Services, Florence, Italy, 18–22 May 2015; ACM: New York, NY, USA, 2015. [Google Scholar]
- Zhang, W.; Chen, J.; Zhang, Y.; Raychaudhuri, D. Towards Efficient Edge Cloud Augmentation for Virtual Reality MMOGs. In Proceedings of the Second ACM/IEEE Symposium on Edge Computing—SEC ’17, ACM/IEEE, San Jose, CA, USA, 12–14 October 2017. [Google Scholar]
- Maheshwari, S.; Raychaudhuri, D.; Seskar, I.; Bronzino, F. Scalability and Performance Evaluation of Edge Cloud Systems for Latency Constrained Applications. In Proceedings of the 2018 IEEE/ACM Symposium on Edge Computing (SEC), Seattle, WA, USA, 25–27 October 2018; pp. 286–299. [Google Scholar]
- Rodrigues, T.G.; Suto, K.; Nishiyama, H.; Kato, N. Hybrid method for minimizing service delay in edge cloud computing through VM migration and transmission power control. IEEE Trans. Comput. 2017, 66, 810–819. [Google Scholar] [CrossRef]
- Arduino Uno Website. Available online: https://www.arduino.cc/ (accessed on 13 March 2018).
- N298 Presentation. Available online: https://www.st.com/en/motor-drivers/l298.html (accessed on 20 February 2018).
- Raspberry Pi 3 Website. Available online: https://www.raspberrypi.org/ (accessed on 25 May 2018).
- Raspbian os Website. Available online: https://www.raspbian.org/ (accessed on 25 May 2018).
- The OpenCv Library. Available online: https://opencv.org/ (accessed on 22 June 2018).
- Python Website. Available online: https://www.python.org/ (accessed on 13 June 2018).
- Openjdk Website. Available online: https://openjdk.java.net/install/ (accessed on 13 June 2018).
- Sqlite Website. Available online: https://www.sqlite.org/ (accessed on 13 June 2018).
- Nodered Website. Available online: https://nodered.org/ (accessed on 15 July 2018).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| arrival rate | |
| service rate | |
| c | number of available servers |
| V | computing latency per task |
| computation delay | |
| f | instructions per seconds |
| K | number of instructions required per task |
| delay in a computation node | |
| W | queuing delay |
| utilization factor | |
| queue probability | |
| cloud based latency | |
| edge based latency | |
| proportional constant for uplink and downlink from the smart device to AP | |
| proportional constant for uplink and downlink from AP to the cloud | |
| distance from i-th AP to smart device | |
| distance between i-th AP to the cloud | |
| m | number of available AP |
| delay for overload on the edge node |
| id | Command | Directions | Options |
|---|---|---|---|
| Device | Move Stop Speed Turn Rotate Surveillance AlarmDetected RemoteControl | forward backward left right up down | throttle or digital value for speed |
| id | Command | Directions | Options |
|---|---|---|---|
| Device | Rotate TakePicture ChangeResolution Zoom | left right up down in out | decimal valute that can represent the degrees for the rotation, the percentage of zoom or the resolution |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Santamaria, A.F.; Raimondo, P.; Tropea, M.; De Rango, F.; Aiello, C. An IoT Surveillance System Based on a Decentralised Architecture. Sensors 2019, 19, 1469. https://doi.org/10.3390/s19061469
Santamaria AF, Raimondo P, Tropea M, De Rango F, Aiello C. An IoT Surveillance System Based on a Decentralised Architecture. Sensors. 2019; 19(6):1469. https://doi.org/10.3390/s19061469
Chicago/Turabian StyleSantamaria, Amilcare Francesco, Pierfrancesco Raimondo, Mauro Tropea, Floriano De Rango, and Carmine Aiello. 2019. "An IoT Surveillance System Based on a Decentralised Architecture" Sensors 19, no. 6: 1469. https://doi.org/10.3390/s19061469
APA StyleSantamaria, A. F., Raimondo, P., Tropea, M., De Rango, F., & Aiello, C. (2019). An IoT Surveillance System Based on a Decentralised Architecture. Sensors, 19(6), 1469. https://doi.org/10.3390/s19061469