Automated Accelerometer-Based Gait Event Detection During Multiple Running Conditions

 , ,
, , 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Data Collection
2.1.1. Experiment 1: Instrumented Treadmill
2.1.2. Experiment 2: Indoor Track
2.1.3. Experiment 3: Outdoor
2.2. Data Processing
2.3. Algorithm Description
2.4. Algorithm Implementation
2.5. Algorithm Testing
3. Results
3.1. Algorithm Implementation
3.2. Algorithm Testing
4. Discussion
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Dugan, S.A.; Bhat, K.P. Biomechanics and Analysis of Running Gait. Phys. Med. Rehabil. Clin. N. Am. 2005, 16, 603–621. [Google Scholar] [CrossRef]
- Norris, M.; Anderson, R.; Kenny, I.C. Method Analysis of Accelerometers and Gyroscopes in Running Gait: A Systematic Review. Proc. Inst. Mech. Eng. Part P J. Sports Eng. Technol. 2014, 228, 3–15. [Google Scholar] [CrossRef]
- Higginson, B.K. Methods of Running Gait Analysis. Curr. Sports Med. Rep. 2009, 8, 136–141. [Google Scholar] [CrossRef] [Green Version]
- Benson, L.C.; Clermont, C.A.; Bosnjak, E.; Ferber, R. The use of Wearable Devices for Walking and Running Gait Analysis outside of the Lab: A Systematic Review. Gait Posture 2018, 63, 124–138. [Google Scholar] [CrossRef] [PubMed]
- Ahamed, N.U.; Kobsar, D.; Benson, L.C.; Clermont, C.A.; Kohrs, R.; Osis, S.T.; Ferber, R. Using an Accelerometer to Classify Subject-Specific Running Biomechanical Gait Patterns Based on Changes in Environmental Weather Conditions. PLoS ONE 2018, in press. [Google Scholar] [CrossRef] [PubMed]
- Sprager, S.; Juric, B.M. Inertial Sensor-Based Gait Recognition: A Review. Sensors 2015, 15, 22089–22127. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Benson, L.C.; Clermont, C.A.; Osis, S.T.; Kobsar, D.; Ferber, R. Classifying Running Speed Conditions using a Single Wearable Sensor: Optimal Segmentation and Feature Extraction Methods. J. Biomech. 2018, 71, 94–99. [Google Scholar] [CrossRef] [PubMed]
- Willy, R.; Buchenic, L.; Rogacki, K.; Ackerman, J.; Schmidt, A.; Willson, J. In-field Gait Retraining and Mobile Monitoring to Address Running Biomechanics Associated with Tibial Stress Fracture. Scand. J. Med. Sci. Sports 2016, 26, 197–205. [Google Scholar] [CrossRef]
- Osis, S.T.; Hettinga, B.A.; Leitch, J.; Ferber, R. Predicting Timing of Foot Strike during Running, Independent of Striking Technique, using Principal Component Analysis of Joint Angles. J. Biomech. 2014, 47, 2786–2789. [Google Scholar] [CrossRef]
- Milner, C.E.; Paquette, M.R. A Kinematic Method to Detect Foot Contact during Running for all Foot Strike Patterns. J. Biomech. 2015, 48, 3502–3505. [Google Scholar] [CrossRef]
- Fellin, R.E.; Rose, W.C.; Royer, T.D.; Davis, I.S. Comparison of Methods for Kinematic Identification of Footstrike and Toe-Off during Overground and Treadmill Running. J. Sci. Med. Sport 2010, 13, 646–650. [Google Scholar] [CrossRef] [PubMed]
- Osis, S.T.; Hettinga, B.A.; Ferber, R. Predicting Ground Contact Events for a Continuum of Gait Types: An Application of Targeted Machine Learning using Principal Component Analysis. Gait Posture 2016, 46, 86–90. [Google Scholar] [CrossRef] [PubMed]
- Patterson, M.; McGrath, D.; Caulfield, B. Using a Tri-Axial Accelerometer to Detect Technique Breakdown due to Fatigue in Distance Runners: A Preliminary Perspective. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 6511–6514. [Google Scholar]
- Strohrmann, C.; Harms, H.; Kappeler-Setz, C.; Troester, G. Monitoring Kinematic Changes with Fatigue in Running using Body-Worn Sensors. IEEE Trans. Inf. Technol. Biomed. 2012, 16, 983–990. [Google Scholar] [CrossRef]
- Chew, D.; Ngoh, K.J.; Gouwanda, D.; Gopalai, A.A. Estimating Running Spatial and Temporal Parameters using an Inertial Sensor. Sports Eng. 2018, 21, 115–122. [Google Scholar] [CrossRef]
- Auvinet, B.; Gloria, E.; Renault, G.; Barrey, E. Runner’s Stride Analysis: Comparison of Kinematic and Kinetic Analyses Under Field Conditions. Sci. Sports 2002, 17, 92–94. [Google Scholar] [CrossRef]
- Wixted, A.J.; Billing, D.C.; James, D.A. Validation of Trunk Mounted Inertial Sensors for Analysing Running Biomechanics Under Field Conditions, using Synchronously Collected Foot Contact Data. Sports Eng. 2010, 12, 207–212. [Google Scholar] [CrossRef]
- Kawabata, M.; Goto, K.; Fukusaki, C.; Sasaki, K.; Hihara, E.; Mizushina, T.; Ishii, N. Acceleration Patterns in the Lower and Upper Trunk during Running. J. Sports Sci. 2013, 31, 1841–1853. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.B.; Mellifont, R.B.; Burkett, B.J. The use of a Single Inertial Sensor to Identify Stride, Step, and Stance Durations of Running Gait. J. Sci. Med. Sport 2010, 13, 270–273. [Google Scholar] [CrossRef]
- Maiwald, C.; Dannemann, A.; Gaudel, J.; Oriwol, D. A Simple Method to Detect Stride Intervals in Continuous Acceleration and Gyroscope Data Recorded during Treadmill Running. Footwear Sci. 2015, 7, S143–S144. [Google Scholar] [CrossRef]
- Mo, S.; Chow, D.H.K. Accuracy of Three Methods in Gait Event Detection during Overground Running. Gait Posture 2018, 59, 93–98. [Google Scholar] [CrossRef]
- Ahamed, N.U.; Kobsar, D.; Benson, L.C.; Clermont, C.A.; Osis, S.T.; Ferber, R. Subject-Specific and Group-Based Running Pattern Classification using a Single Wearable Sensor. J. Biomech. 2019, 84, 227–233. [Google Scholar] [CrossRef] [PubMed]
- Watari, R.; Hettinga, B.; Osis, S.; Ferber, R. Validation of a Torso-Mounted Accelerometer for Measures of Vertical Oscillation and Ground Contact Time during Treadmill Running. J. Appl. Biomech. 2016, 32, 306–310. [Google Scholar] [CrossRef]
- Milosevic, B.; Farella, E. Wearable Inertial Sensor for Jump Performance Analysis. In Proceedings of the 2015 Workshop on Wearable Systems and Applications, Florence, Italy, 18 May 2015; pp. 15–20. [Google Scholar]
- Benson, L.C.; O’Connor, K.M. The Effect of Exertion on Joint Kinematics and Kinetics during Running using a Waveform Analysis Approach. J. Appl. Biomech. 2015, 31, 250–257. [Google Scholar] [CrossRef]
- Meardon, S.A.; Hamill, J.; Derrick, T.R. Running Injury and Stride Time Variability over a Prolonged Run. Gait Posture 2011, 33, 36–40. [Google Scholar] [CrossRef] [PubMed]
- Moe-Nilssen, R. A New Method for Evaluating Motor Control in Gait Under Real-Life Environmental Conditions. Part 1: The Instrument. Clin. Biomech. 1998, 13, 320–327. [Google Scholar] [CrossRef]
- Avvenuti, M.; Casella, A.; Cesarini, D. Using Gait Symmetry to Virtually Align a Triaxial Accelerometer during Running and Walking. Electron. Lett. 2013, 49, 120–121. [Google Scholar] [CrossRef]
- Wundersitz, D.W.; Gastin, P.B.; Richter, C.; Robertson, S.J.; Netto, K.J. Validity of a Trunk-Mounted Accelerometer to Assess Peak Accelerations during Walking, Jogging and Running. Eur. J. Sport Sci. 2015, 15, 382–390. [Google Scholar] [CrossRef] [PubMed]
- Lenhart, R.L.; Thelen, D.G.; Wille, C.M.; Chumanov, E.S.; Heiderscheit, B.C. Increasing Running Step Rate Reduces Patellofemoral Joint Forces. Med. Sci. Sports Exerc. 2014, 46, 557–564. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hafer, J.F.; Brown, A.M.; deMille, P.; Hillstrom, H.J.; Garber, C.E. The Effect of a Cadence Retraining Protocol on Running Biomechanics and Efficiency: A Pilot Study. J. Sports Sci. 2015, 33, 724–731. [Google Scholar] [CrossRef] [PubMed]
- Bood, R.J.; Nijssen, M.; Van Der Kamp, J.; Roerdink, M. The Power of Auditory-Motor Synchronization in Sports: Enhancing Running Performance by Coupling Cadence with the Right Beats. PLoS ONE 2013, 8, e70758. [Google Scholar] [CrossRef]
- Billat, V.; Mille-Hamard, L.; Petit, B.; Koralsztein, J. The Role of Cadence on the VO2 Slow Component in Cycling and Running in Triathletes. Int. J. Sports Med. 1999, 20, 429–437. [Google Scholar] [CrossRef] [PubMed]
- Handsaker, J.C.; Forrester, S.E.; Folland, J.P.; Black, M.I. A Kinematic Algorithm to Identify Gait Events during Running at Different Speeds and with Different Footstrike Types. J. Biomech. 2016, 49, 4128–4133. [Google Scholar] [CrossRef] [PubMed]
- Bersch, S.D.; Azzi, D.; Khusainov, R.; Achumba, I.E.; Ries, J. Sensor Data Acquisition and Processing Parameters for Human Activity Classification. Sensors 2014, 14, 4239–4270. [Google Scholar] [CrossRef] [PubMed] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | Condition | Mean Back-Foot Difference (s) | SD Back-Foot Difference (s) | ||
|---|---|---|---|---|---|
| IC | TO | IC | TO | ||
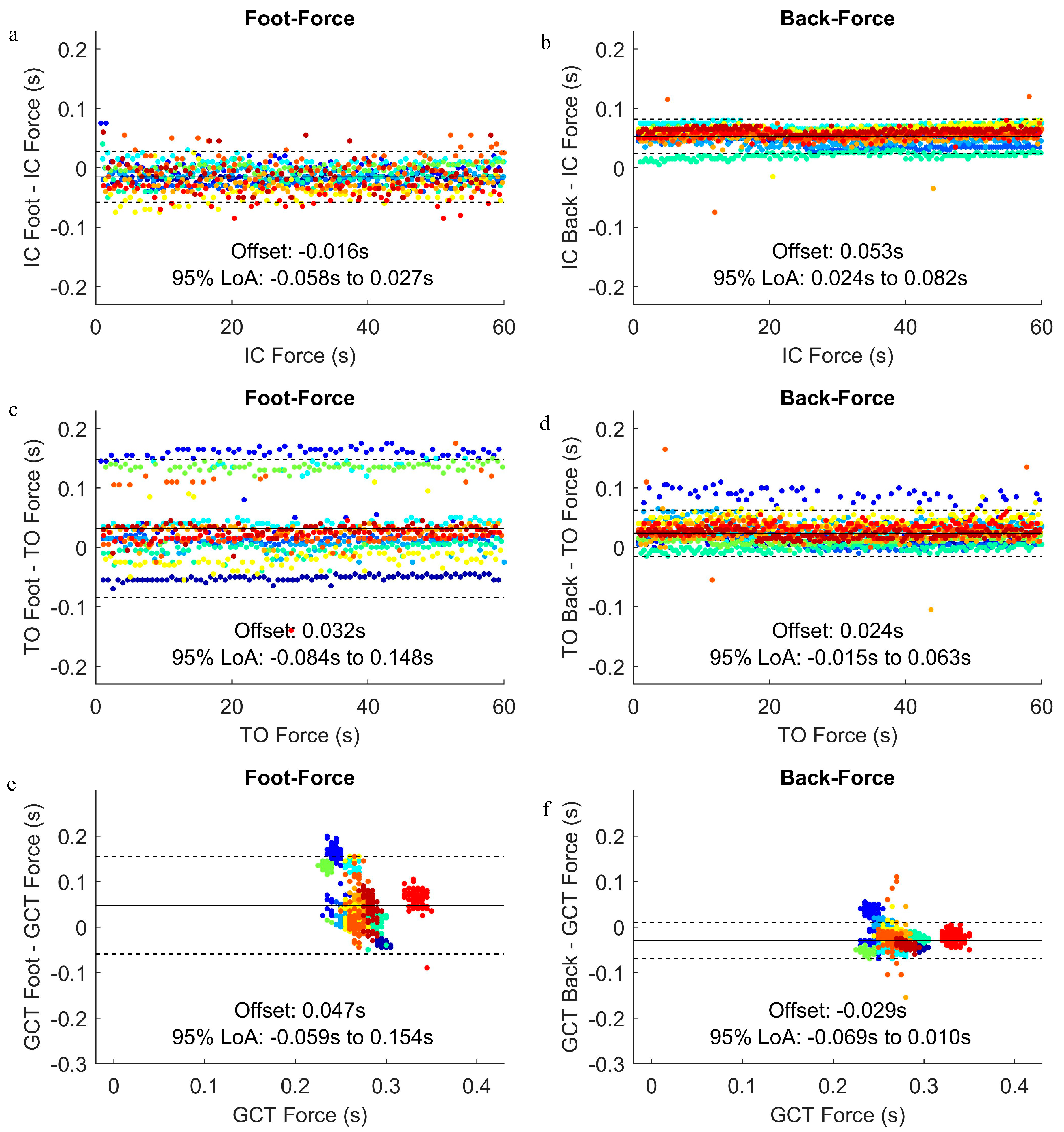
| Treadmill | 2.7 m/s | 0.066 (0.013) | −0.015 (0.036) | 0.018 (0.010) | 0.041 (0.027) |
| 3.3 m/s | 0.069 (0.020) | −0.008 (0.053) | 0.014 (0.007) | 0.026 (0.017) | |
| 3.6 m/s | 0.065 (0.017) | −0.009 (0.054) | 0.014 (0.006) | 0.023 (0.018) | |
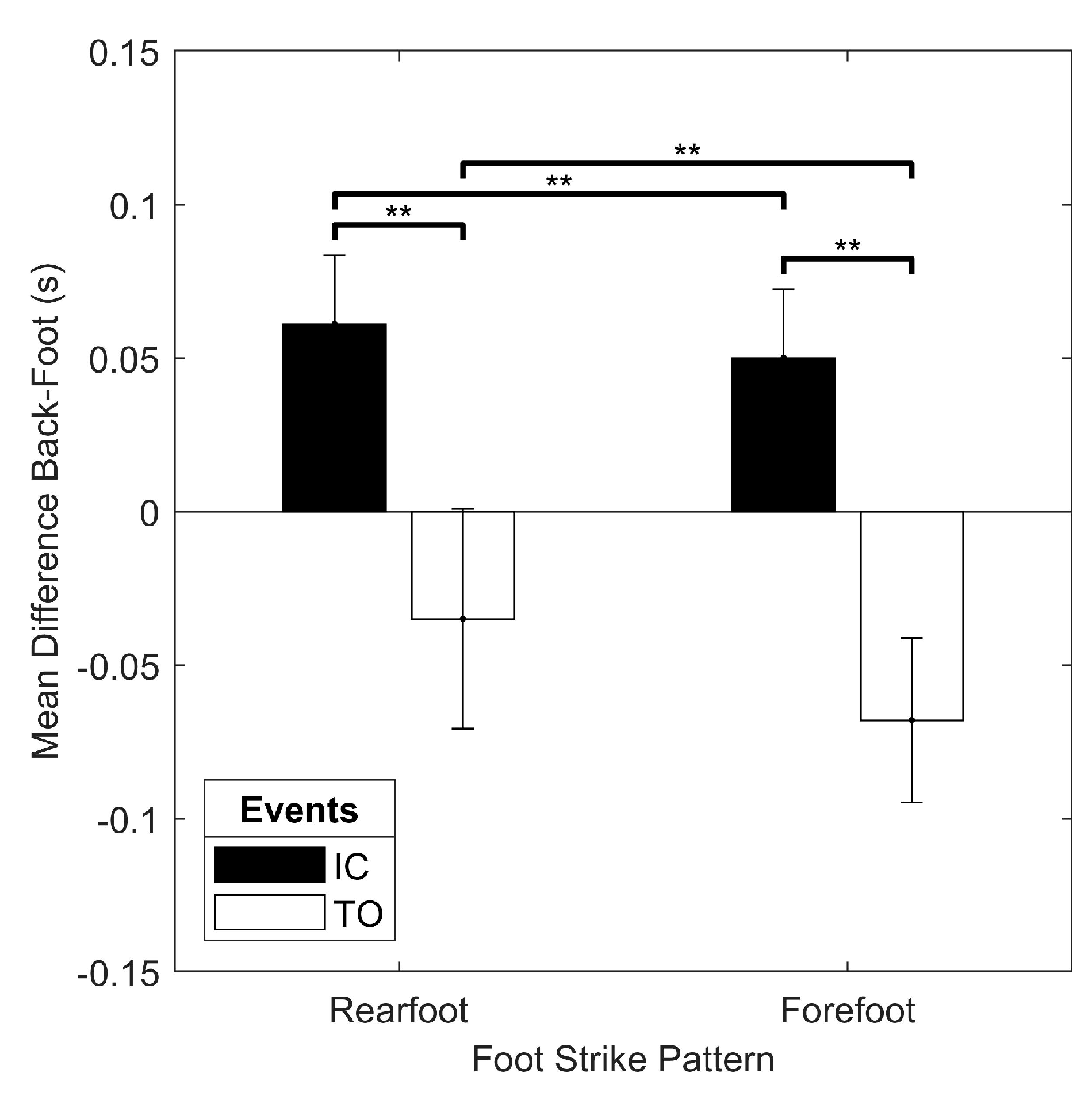
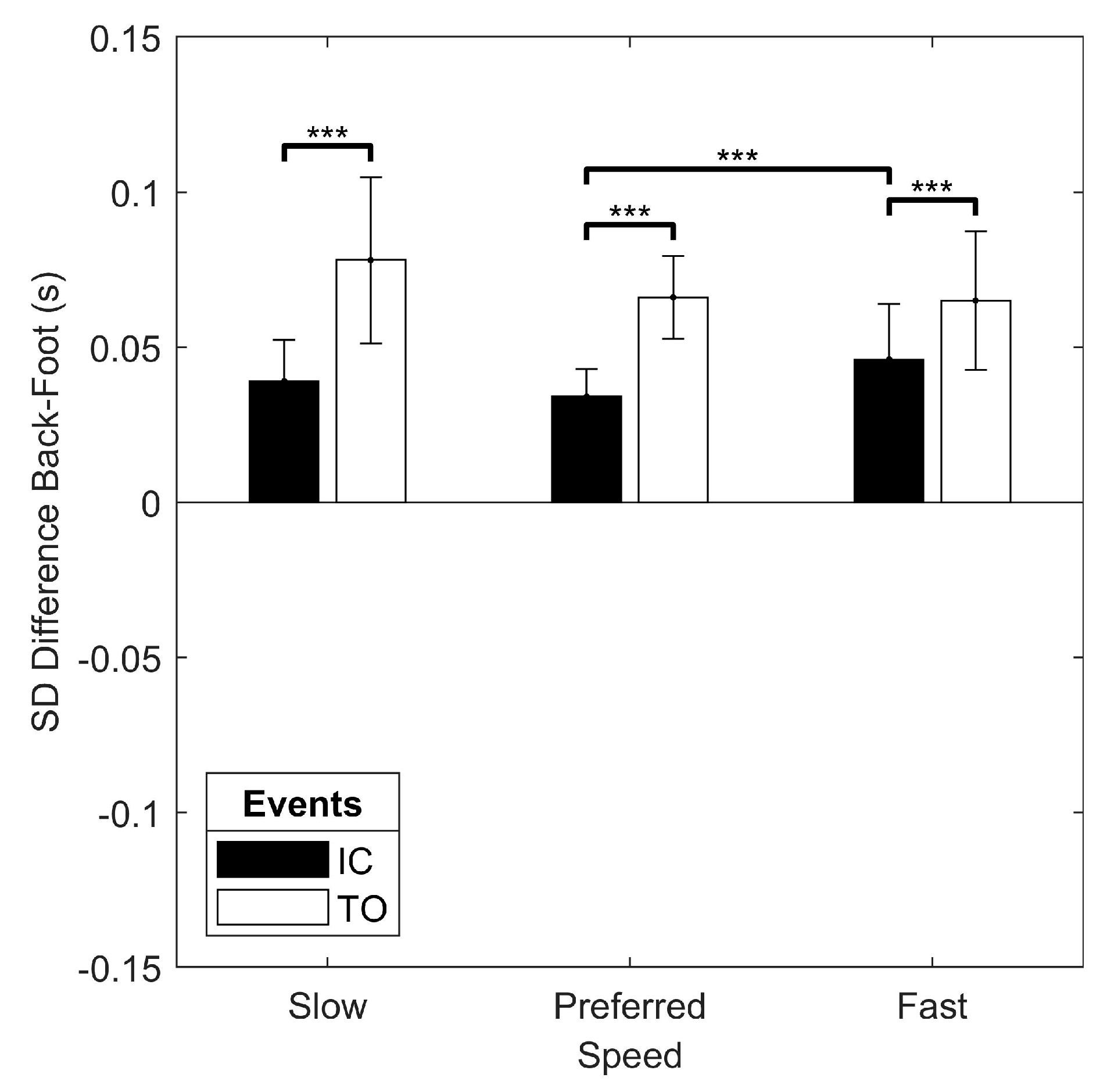
| Indoor Track | Rearfoot, Slow | 0.057 (0.024) | −0.030 (0.058) | 0.049 (0.025) | 0.088 (0.032) |
| Rearfoot, Preferred | 0.066 (0.025) | −0.029 (0.041) | 0.039 (0.015) | 0.069 (0.022) | |
| Rearfoot, Fast | 0.059 (0.019) | −0.046 (0.030) | 0.049 (0.021) | 0.069 (0.017) | |
| Forefoot, Slow | 0.047 (0.024) | −0.066 (0.052) | 0.030 (0.012) | 0.067 (0.032) | |
| Forefoot, Preferred | 0.051 (0.026) | −0.058 (0.042) | 0.029 (0.011) | 0.063 (0.017) | |
| Forefoot, Fast | 0.052 (0.019) | −0.079 (0.026) | 0.042 (0.015) | 0.061 (0.026) | |
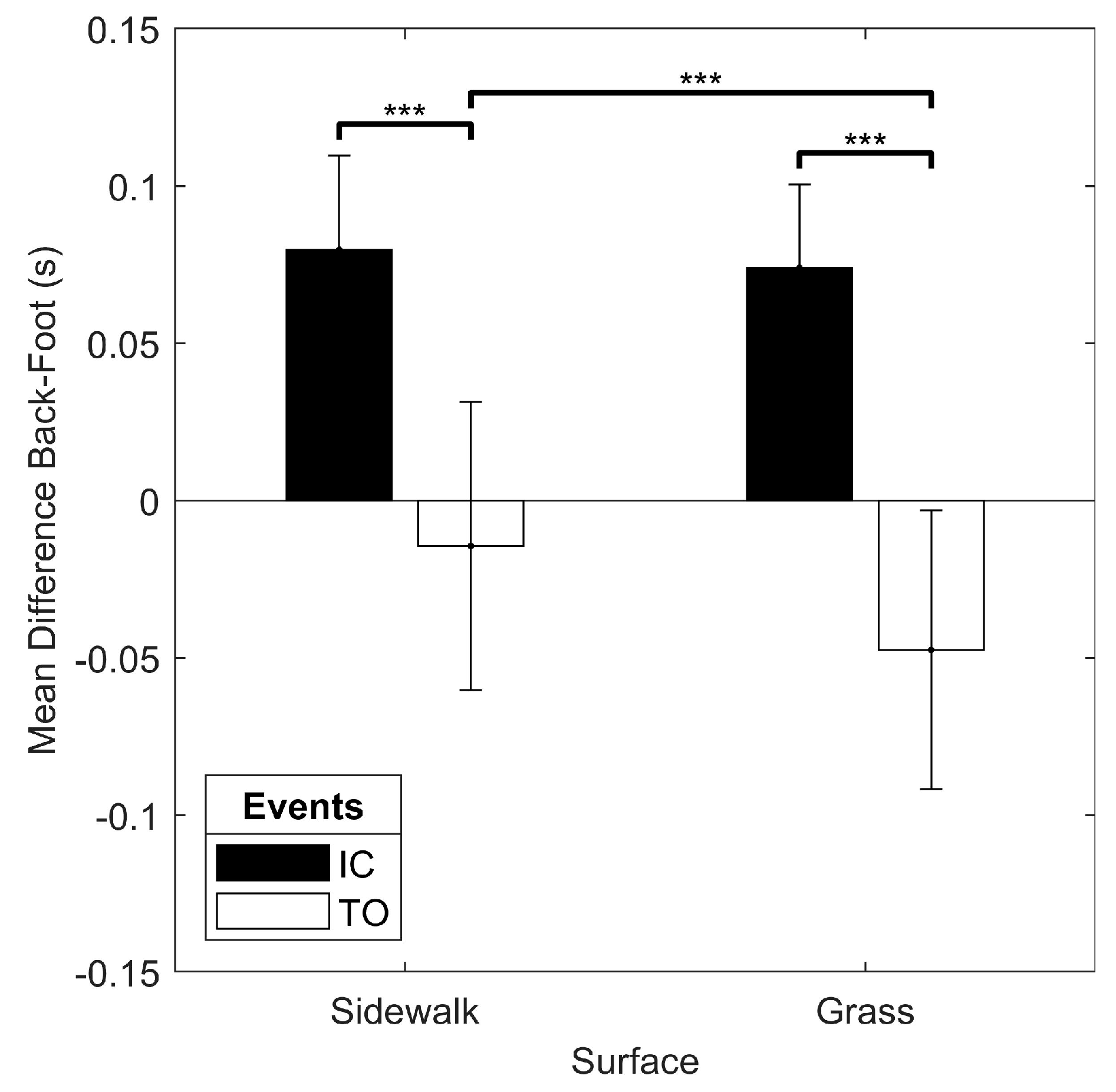
| Outdoor | Sidewalk | 0.080 (0.030) | −0.015 (0.046) | 0.032 (0.019) | 0.067 (0.019) |
| Grass | 0.074 (0.027) | −0.048 (0.044) | 0.033 (0.023) | 0.064 (0.025) | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benson, L.C.; Clermont, C.A.; Watari, R.; Exley, T.; Ferber, R. Automated Accelerometer-Based Gait Event Detection During Multiple Running Conditions. Sensors 2019, 19, 1483. https://doi.org/10.3390/s19071483
Benson LC, Clermont CA, Watari R, Exley T, Ferber R. Automated Accelerometer-Based Gait Event Detection During Multiple Running Conditions. Sensors. 2019; 19(7):1483. https://doi.org/10.3390/s19071483
Chicago/Turabian StyleBenson, Lauren C., Christian A. Clermont, Ricky Watari, Tessa Exley, and Reed Ferber. 2019. "Automated Accelerometer-Based Gait Event Detection During Multiple Running Conditions" Sensors 19, no. 7: 1483. https://doi.org/10.3390/s19071483
APA StyleBenson, L. C., Clermont, C. A., Watari, R., Exley, T., & Ferber, R. (2019). Automated Accelerometer-Based Gait Event Detection During Multiple Running Conditions. Sensors, 19(7), 1483. https://doi.org/10.3390/s19071483