Wi-Fi-Based Effortless Indoor Positioning System Using IoT Sensors




Abstract
:1. Introduction
2. Existing Systems
2.1. Survey-Based Technique
2.2. Interpolation-Based Systems
2.3. Crowd-Sourcing-Based Techniques
2.4. Probabilistic-Packet Transmission Technique
2.5. Model-Based Systems
2.6. Vector-Map-Based Techniques
2.6.1. Empirical-Path Loss Technique
2.6.2. Deterministic-Ray Tracing and Radiosity Technique
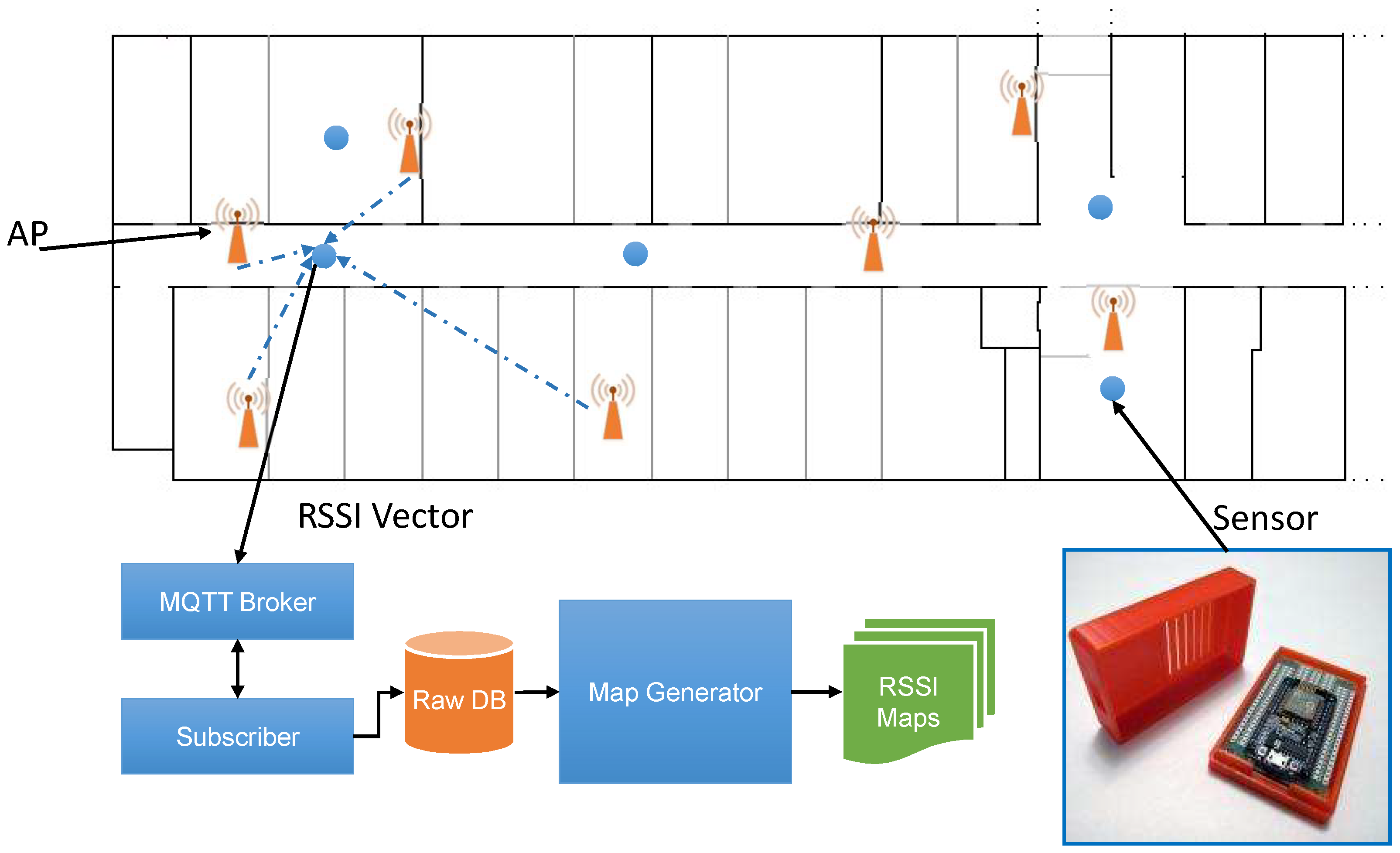
3. Proposed Approach
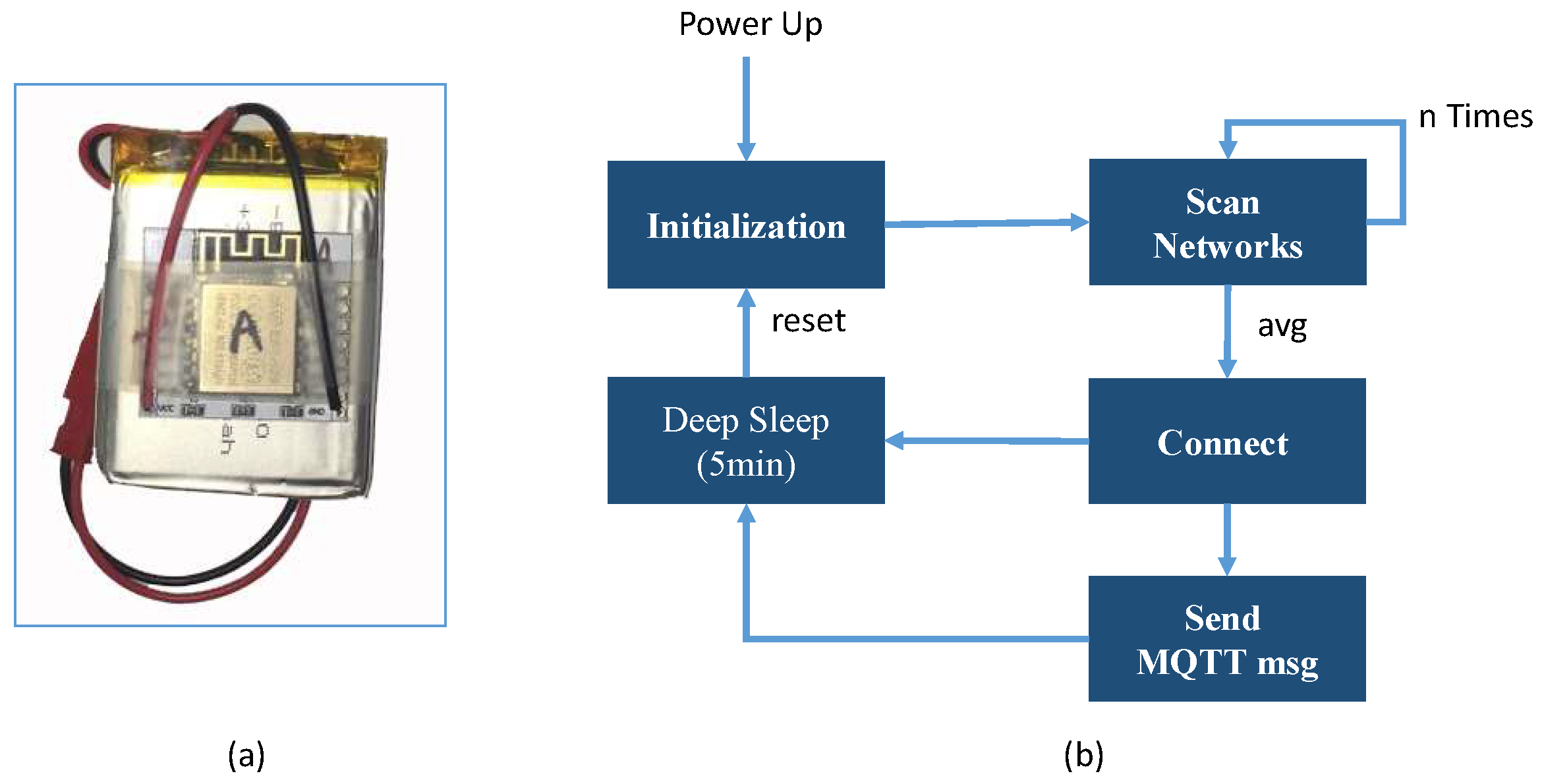
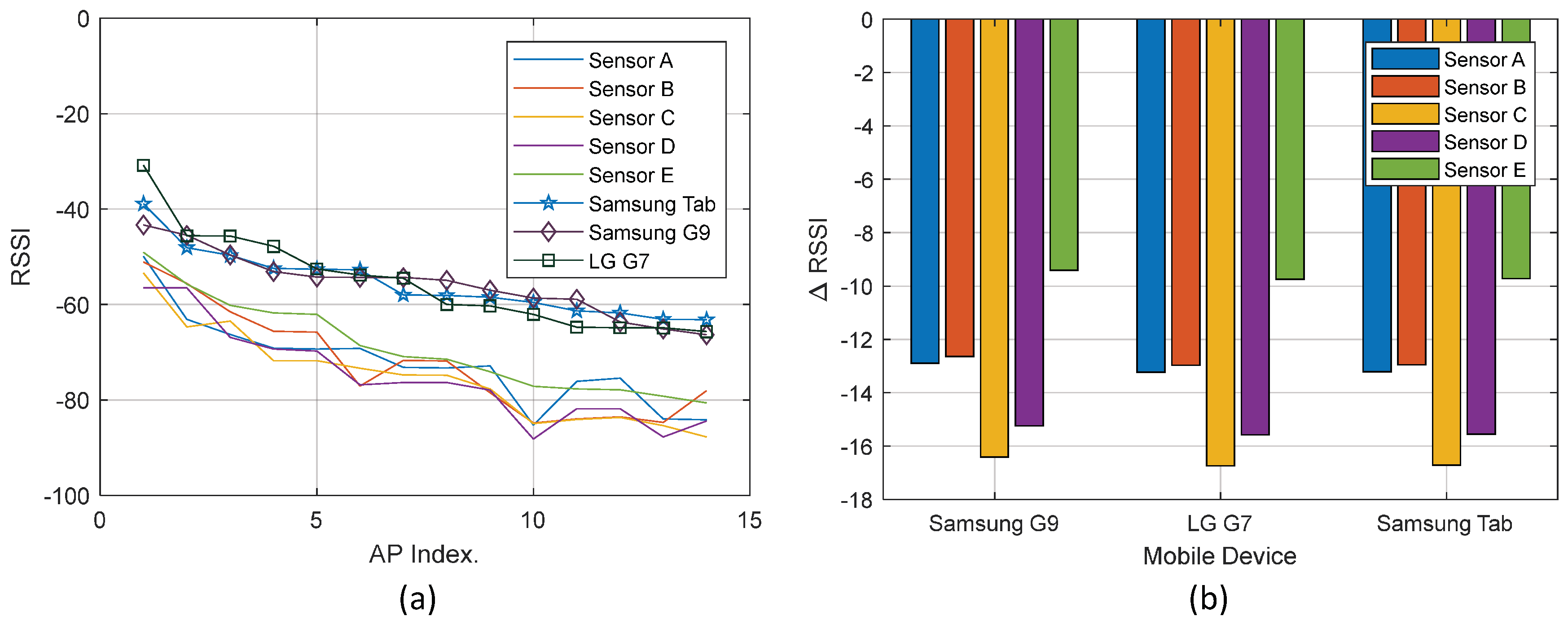
4. Sensor Setup and Calibration
5. Offline Radio Map Metadata Generation (Phase I)
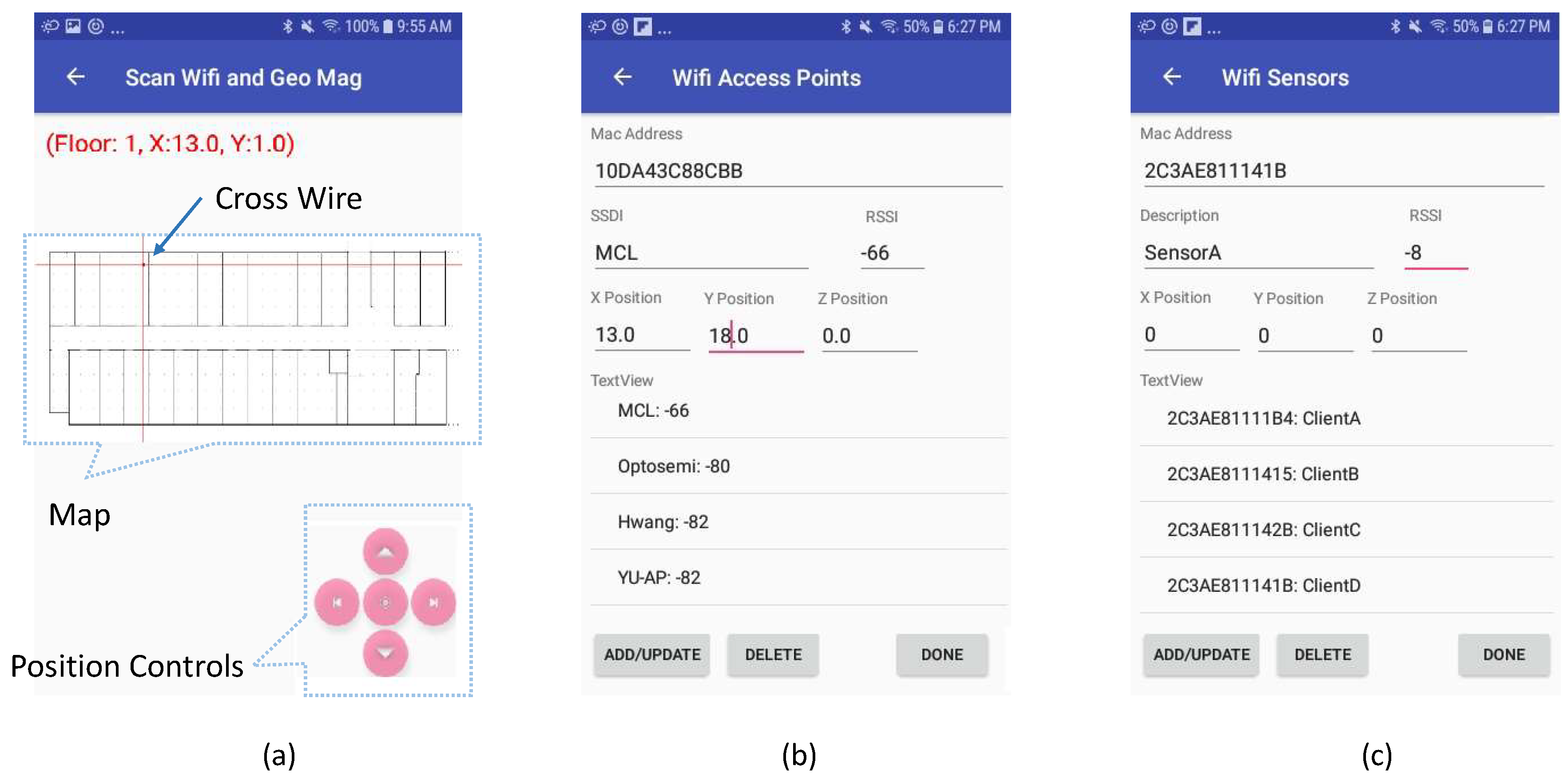
5.1. Access Points and Sensor Registration
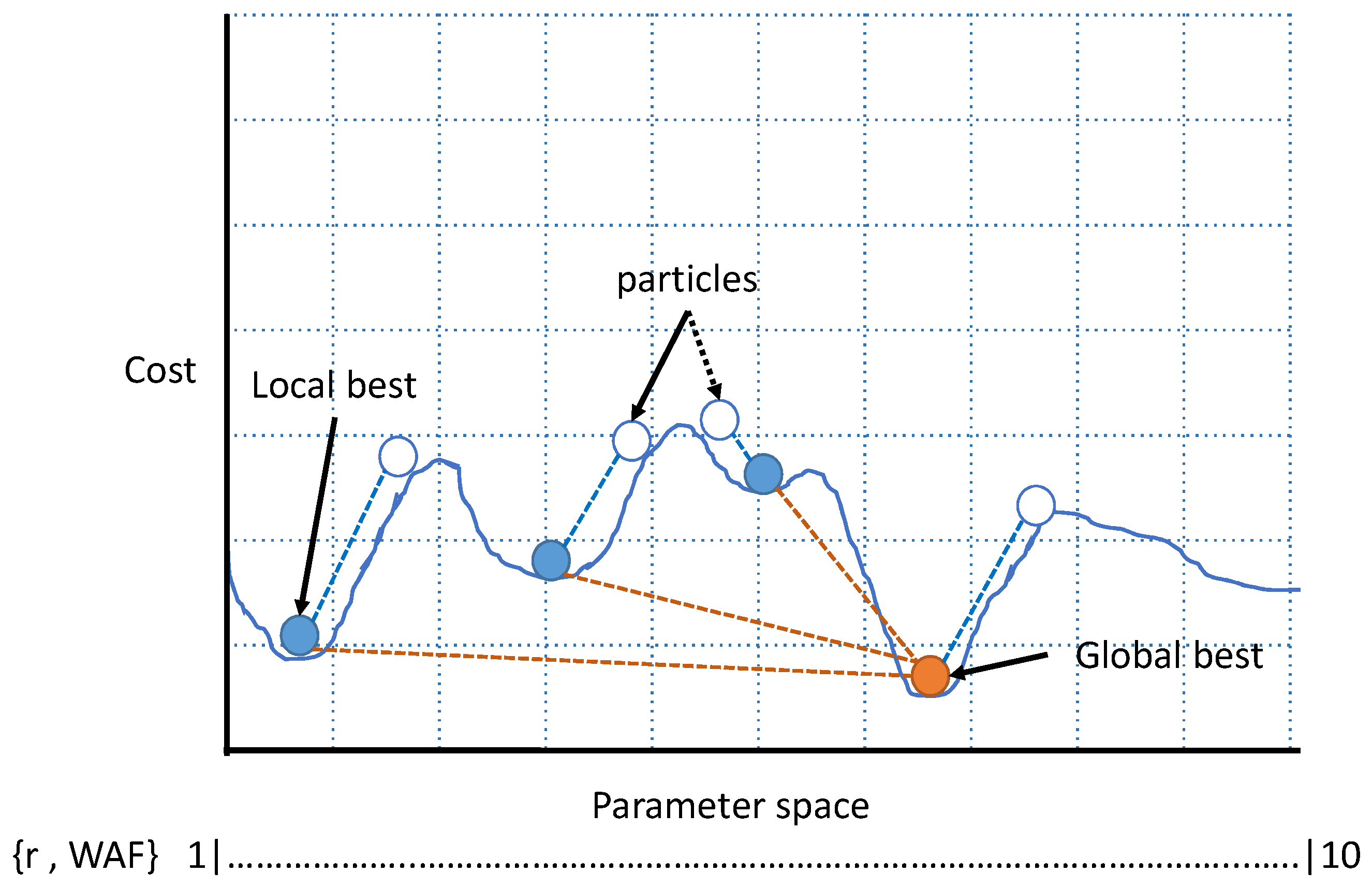
5.2. WAF and Path Loss Constant Estimation
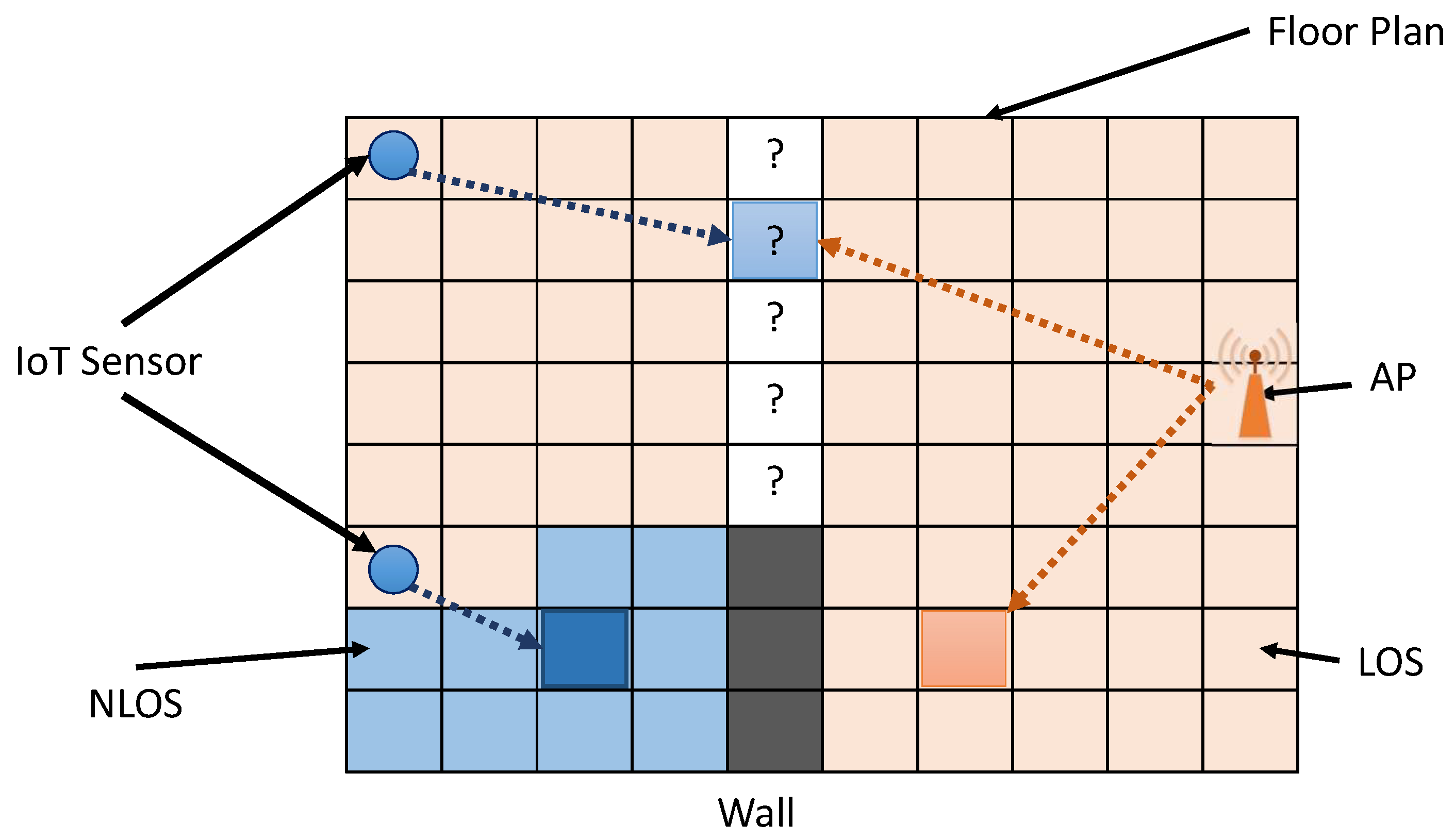
5.3. Radio Map Metadata Generation
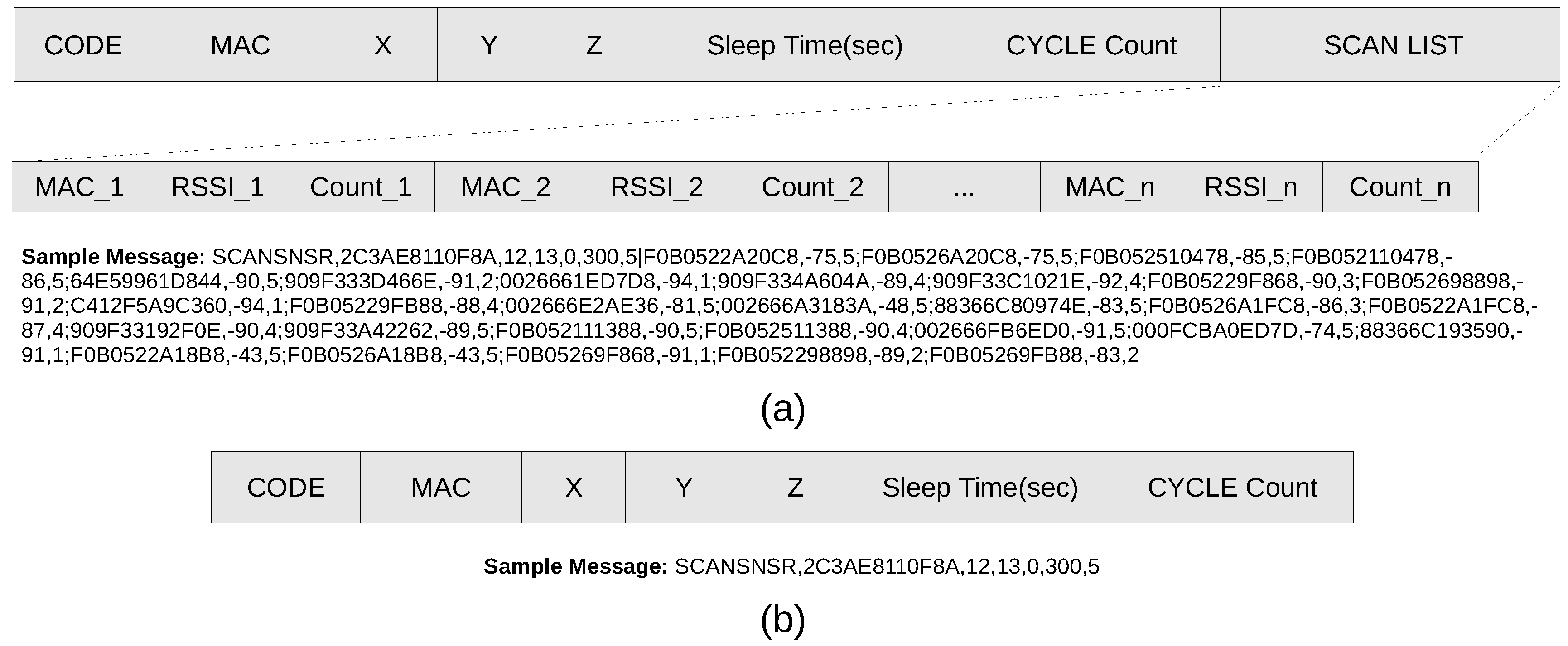
6. Online RSSI Map Generation (Phase II)
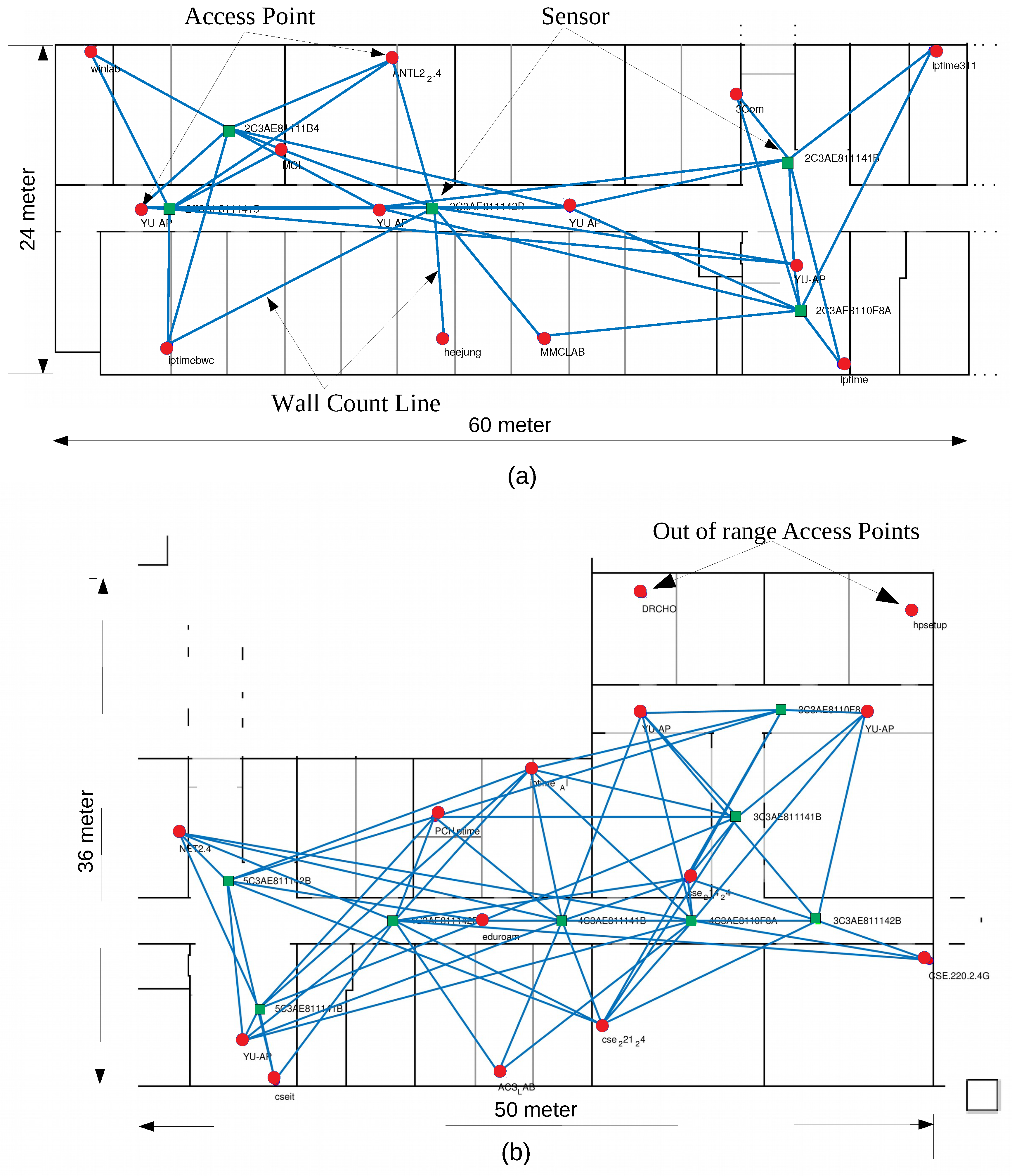
7. Experimental Setup
8. Results and Discussion
8.1. Data Collection and Setup
8.2. Path Loss and Attenuation Parameters Validation
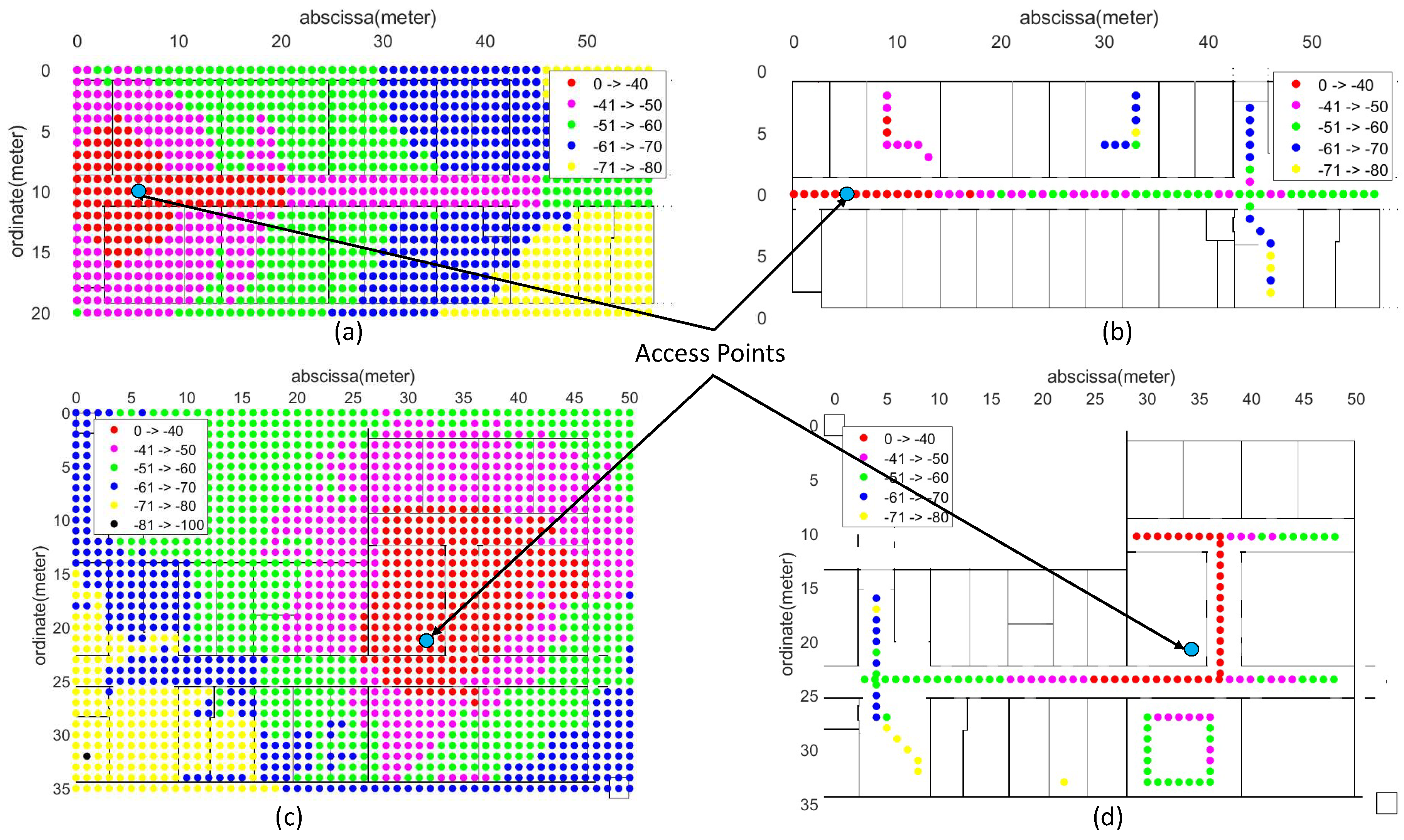
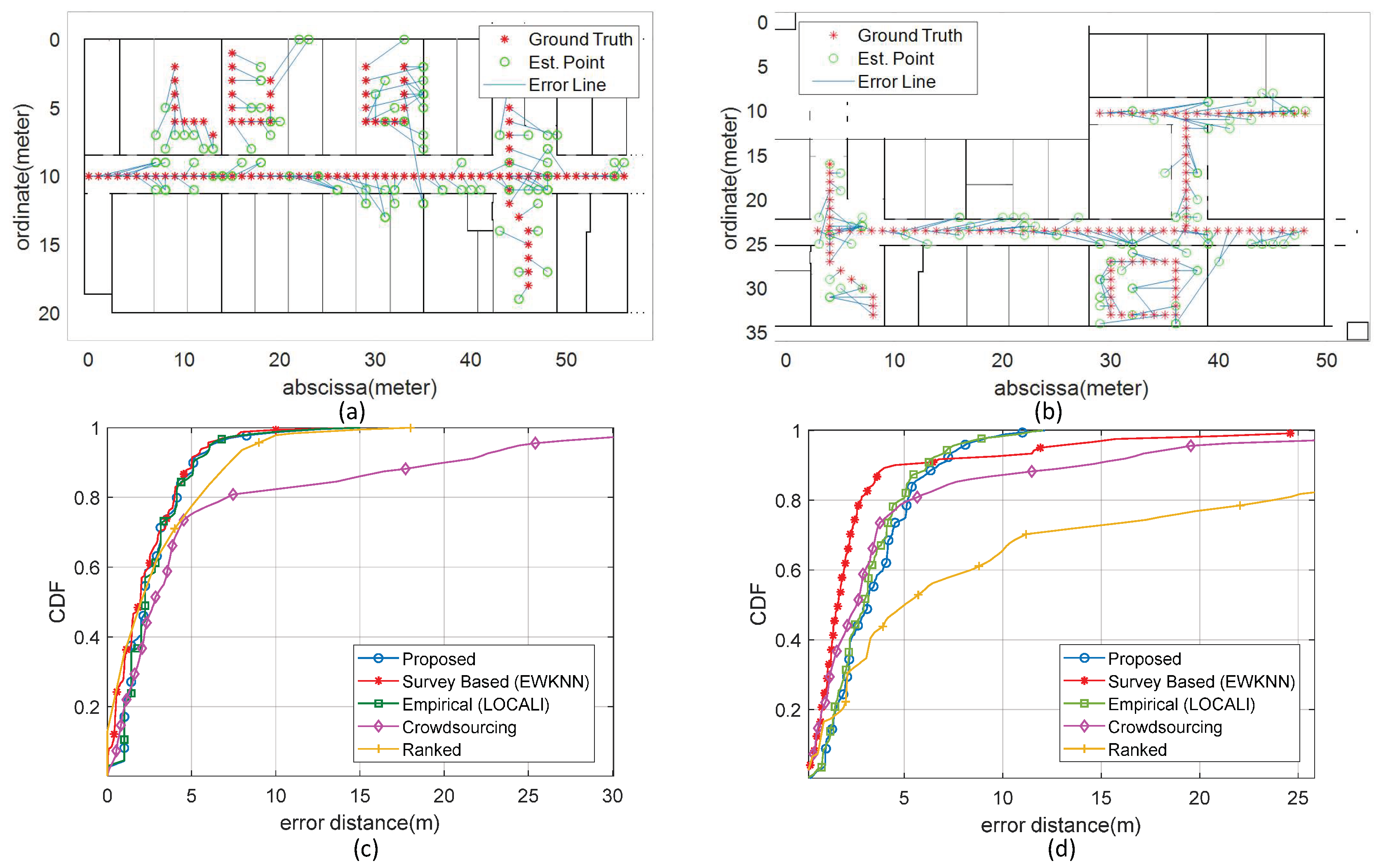
8.3. Map Validation
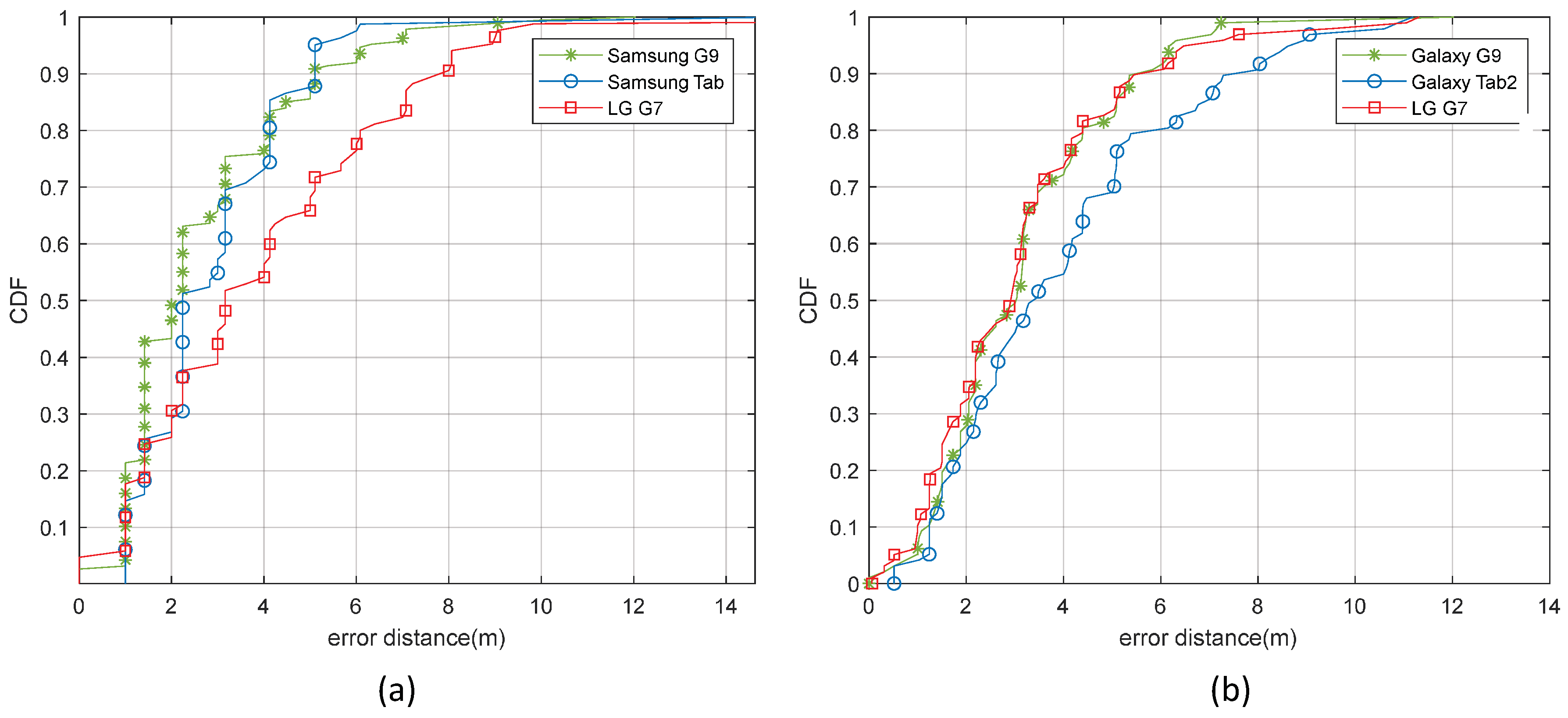
8.4. Plug and Play Solution
9. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Hossain, A.M.; Soh, W.S. A survey of calibration-free indoor positioning systems. Comput. Commun. 2015, 66, 1–13. [Google Scholar] [CrossRef]
- Chan, Y.T.; Ho, K. A simple and efficient estimator for hyperbolic location. IEEE Trans. Signal Process. 1994, 42, 1905–1915. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the INFOCOM 2000, Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies, Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar]
- Husen, M.N.; Lee, S. Indoor Location Sensing with Invariant Wi-Fi Received Signal Strength Fingerprinting. Sensors 2016, 16, 1898. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.; Dessai, P.; Verma, M.; Gerla, M. FreeLoc: Calibration-free crowdsourced indoor localization. In Proceedings of the INFOCOM 2013, Turin, Italy, 14–19 April 2013; pp. 2481–2489. [Google Scholar]
- Shen, G.; Chen, Z.; Zhang, P.; Moscibroda, T.; Zhang, Y. Walkie-Markie: Indoor pathway mapping made easy. In Proceedings of the 10th USENIX Conference on Networked Systems Design and Implementation, Lombard, IL, USA, 2–5 April 2013; pp. 85–98. [Google Scholar]
- Zhou, B.; Li, Q.; Mao, Q.; Tu, W.; Zhang, X.; Chen, L. ALIMC: Activity landmark-based indoor mapping via crowdsourcing. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2774–2785. [Google Scholar] [CrossRef]
- Wu, C.; Yang, Z.; Liu, Y.; Xi, W. WILL: Wireless indoor localization without site survey. IEEE Trans. Parallel Distrib. Syst. 2013, 24, 839–848. [Google Scholar]
- Gwon, Y.; Jain, R. Error characteristics and calibration-free techniques for wireless LAN-based location estimation. In Proceedings of the Second International Workshop on Mobility Management & Wireless Access Protocols, Philadelphia, PA, USA, 1 October 2004; pp. 2–9. [Google Scholar]
- Narzullaev, A.; Park, Y. Novel calibration algorithm for received signal strength based indoor real-time locating systems. AEU-Int. J. Electron. Commun. 2013, 67, 637–644. [Google Scholar] [CrossRef]
- Ali, M.U.; Hur, S.; Park, Y. Locali: Calibration-free systematic localization approach for indoor positioning. Sensors 2017, 17, 1213. [Google Scholar] [CrossRef] [PubMed]
- Honkavirta, V.; Perala, T.; Ali-Loytty, S.; Piché, R. A comparative survey of WLAN location fingerprinting methods. In Proceedings of the WPNC 2009, 6th Workshop on Positioning, Navigation and Communication, Hannover, Germany, 19 March 2009; pp. 243–251. [Google Scholar]
- Minaev, G.; Visa, A.; Piché, R. Comprehensive survey of similarity measures for ranked based location fingerprinting algorithm. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–4. [Google Scholar]
- Torres-Sospedra, J.; Richter, P.; Mendoza-Silva, G.; Lohan, E.S.; Huerta, J. Characterising the Alteration in the AP Distribution with the RSS Distance and the Position Estimates. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–8. [Google Scholar]
- Lim, H.; Kung, L.C.; Hou, J.C.; Luo, H. Zero-configuration indoor localization over IEEE 802.11 wireless infrastructure. Wirel. Netw. 2010, 16, 405–420. [Google Scholar] [CrossRef]
- Park, J.G.; Charrow, B.; Curtis, D.; Battat, J.; Minkov, E.; Hicks, J.; Teller, S.; Ledlie, J. Growing an Organic Indoor Location System. In Proceedings of the 8th International Conference on Mobile Systems, Applications, and Services, San Francisco, CA, USA, 15–18 June 2010; ACM: New York, NY, USA, 2010; pp. 271–284. [Google Scholar] [CrossRef]
- Chintalapudi, K.; Padmanabha Iyer, A.; Padmanabhan, V.N. Indoor localization without the pain. In Proceedings of the Sixteenth Annual International Conference On Mobile Computing and Networking, Chicago, IL, USA, 20–24 September 2010; pp. 173–184. [Google Scholar]
- Khoshelham, K.; Zlatanova, S. Sensors for indoor mapping and navigation. Sensors 2016, 16, 655. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Zou, H.; Jiang, H.; Zhu, Q.; Soh, Y.C.; Xie, L. Fusion of WiFi, smartphone sensors and landmarks using the Kalman filter for indoor localization. Sensors 2015, 15, 715–732. [Google Scholar] [CrossRef] [PubMed]
- Hilsenbeck, S.; Bobkov, D.; Schroth, G.; Huitl, R.; Steinbach, E. Graph-based data fusion of pedometer and WiFi measurements for mobile indoor positioning. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Seattle, WA, USA, 13–17 September 2014; pp. 147–158. [Google Scholar]
- Li, W.W.; Iltis, R.A.; Win, M.Z. A smartphone localization algorithm using RSSI and inertial sensor measurement fusion. In Proceedings of the 2013 IEEE Global Communications Conference (GLOBECOM), Atlanta, GA, USA, 9–13 December 2013; pp. 3335–3340. [Google Scholar] [CrossRef]
- Deng, Z.A.; Hu, Y.; Yu, J.; Na, Z. Extended kalman filter for real time indoor localization by fusing WiFi and smartphone inertial sensors. Micromachines 2015, 6, 523–543. [Google Scholar] [CrossRef]
- Knauth, S.; Ortega, A.A.B.; Dastageeri, H.; Griese, T.; Tran, Y. Towards Smart Watch Position Estimation Employing RSSI based Probability Maps. In Proceedings of the First BW-CAR Baden-Württemberg CAR Symposium on Information and Communication Systems (SInCom 2014), Furtwangen, Germany, 12 December 2014; p. 75. [Google Scholar]
- Jiao, J.; Li, F.; Deng, Z.; Ma, W. A smartphone camera-based indoor positioning algorithm of crowded scenarios with the assistance of deep CNN. Sensors 2017, 17, 704. [Google Scholar] [CrossRef] [PubMed]
- Cheung, K.W.; Sau, J.M.; Murch, R.D. A new empirical model for indoor propagation prediction. IEEE Trans. Veh. Technol. 1998, 47, 996–1001. [Google Scholar] [CrossRef]
- Ayadi, M.; Torjemen, N.; Tabbane, S. Two-Dimensional Deterministic Propagation Models Approach and Comparison With Calibrated Empirical Models. IEEE Trans. Wirel. Commun. 2015, 14, 5714–5722. [Google Scholar] [CrossRef]
- Belmonte-Fernández, Ó.; Montoliu, R.; Torres-Sospedra, J.; Sansano-Sansano, E.; Chia-Aguilar, D. A radiosity-based method to avoid calibration for indoor positioning systems. Expert Syst. Appl. 2018, 105, 89–101. [Google Scholar] [CrossRef]
- Bruno, L.; Addesso, P.; Restaino, R. Indoor positioning in wireless local area networks with online path-loss parameter estimation. Sci. World J. 2014, 2014, 986714. [Google Scholar] [CrossRef] [PubMed]
- Bose, A.; Foh, C.H. A practical path loss model for indoor WiFi positioning enhancement. In Proceedings of the 2007 6th International Conference on Information, Communications & Signal Processing, Singapore, 10–13 December 2007; pp. 1–5. [Google Scholar]
- Ficco, M.; Esposito, C.; Napolitano, A. Calibrating Indoor Positioning Systems with Low Efforts. IEEE Trans. Mob. Comput. 2014, 13, 737–751. [Google Scholar] [CrossRef]
- Clerc, M.; Kennedy, J. The particle swarm-explosion, stability, and convergence in a multidimensional complex space. IEEE Trans. Evol. Comput. 2002, 6, 58–73. [Google Scholar] [CrossRef]
- Shin, B.; Lee, J.H.; Lee, T.; Kim, H.S. Enhanced weighted K-nearest neighbor algorithm for indoor Wi-Fi positioning systems. In Proceedings of the 2012 8th International Conference on Computing Technology and Information Management (ICCM), Seoul, Korea, 24–26 April 2012; Volume 2, pp. 574–577. [Google Scholar]
- Machaj, J.; Brida, P.; Piché, R. Rank based fingerprinting algorithm for indoor positioning. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Guimaraes, Portugal, 21–23 September 2011; pp. 1–6. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device Name | Sensor A | Sensor B | Sensor C | Sensor D | Sensor E |
|---|---|---|---|---|---|
| Samsung Galaxy Tab2 | −13.21 | −12.95 | −16.72 | −15.55 | −9.72 |
| Samsung Galaxy S9 + | −12.90 | −12.64 | −16.41 | −15.24 | −9.40 |
| LG G7 | −13.23 | −12.97 | −16.74 | −15.57 | −9.74 |
| Building Type | Area (m) | AP | Sensor | (s) | (s) | (s) | Maps Size |
|---|---|---|---|---|---|---|---|
| ICE Department | 20 × 54 | 13 | 5 | 6 | 129 | 24 | 1.2 MB |
| CS Department | 36 × 55 | 14 | 7 | 7 | 260 | 13 | 2.2 MB |
| Site A | Site B | |||
|---|---|---|---|---|
| Proposed | Empirical | Proposed | Emperical | |
| Mean error (dBm) | 3.25 | 16.03 | 1.39 | 22.25 |
| Min error (dBm) | −16 | −9 | −19 | −13 |
| Max error (dBm) | 15 | 49 | 18 | 46 |
| Standard deviation (dBm) | 6.08 | 13.24 | 8.19 | 10.46 |
| Correlation coefficient | 0.95 | 0.84 | 0.82 | 0.77 |
| Site | Technique | 50% | 75% | Average | Std. Dev. | Max Error |
|---|---|---|---|---|---|---|
| ICE Dept. | Proposed | 2.23 | 3.59 | 2.06 | 2.71 | 15.00 |
| Survey-based (EWKNN) | 1.95 | 3.35 | 2.38 | 2.18 | 15.0 | |
| Empirical (LOCALI) | 2.23 | 3.92 | 2.03 | 2.04 | 15.00 | |
| Crowdsourcing | 2.78 | 4.90 | 6.09 | 8.43 | 42.02 | |
| Ranked | 2.00 | 4.50 | 3.37 | 3.11 | 18.00 | |
| CS Dept. | Proposed | 3.13 | 5.08 | 3.55 | 2.23 | 12.14 |
| Survey-based (EWKNN) | 1.61 | 2.56 | 2.88 | 4.33 | 24.71 | |
| Empirical (LOCALI) | 2.96 | 4.27 | 3.31 | 2.13 | 12.03 | |
| Crowdsourcing | 2.58 | 4.00 | 4.86 | 7.49 | 45.00 | |
| Ranked | 5.00 | 18.00 | 12.05 | 14.22 | 49.06 |
| Features | Proposed | Empirical [26] | Ray Tracing [27] | Radiosity [28] | Low Efforts [31] |
|---|---|---|---|---|---|
| Support automated radio map generation | ✓ | ✓ | ✓ | ✓ | ✓ |
| Works with vector maps of environment | ✓ | ✓ | ✓ | ||
| Work with raster maps of environment | ✓ | ||||
| Support estimation of attenuation parameters | ✓ | ||||
| Support periodic updates | ✓ | ||||
| Works with existing AP deployment | ✓ | ✓ | ✓ | ✓ | |
| Requirement of high end computing resources | ✓ | ✓ | |||
| Requirement of additional H/W (Sensors) | ✓ |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, M.U.; Hur, S.; Park, Y. Wi-Fi-Based Effortless Indoor Positioning System Using IoT Sensors. Sensors 2019, 19, 1496. https://doi.org/10.3390/s19071496
Ali MU, Hur S, Park Y. Wi-Fi-Based Effortless Indoor Positioning System Using IoT Sensors. Sensors. 2019; 19(7):1496. https://doi.org/10.3390/s19071496
Chicago/Turabian StyleAli, Muhammad Usman, Soojung Hur, and Yongwan Park. 2019. "Wi-Fi-Based Effortless Indoor Positioning System Using IoT Sensors" Sensors 19, no. 7: 1496. https://doi.org/10.3390/s19071496
APA StyleAli, M. U., Hur, S., & Park, Y. (2019). Wi-Fi-Based Effortless Indoor Positioning System Using IoT Sensors. Sensors, 19(7), 1496. https://doi.org/10.3390/s19071496