Sensor Fusion and State Estimation of IoT Enabled Wind Energy Conversion System




Abstract
:1. Introduction
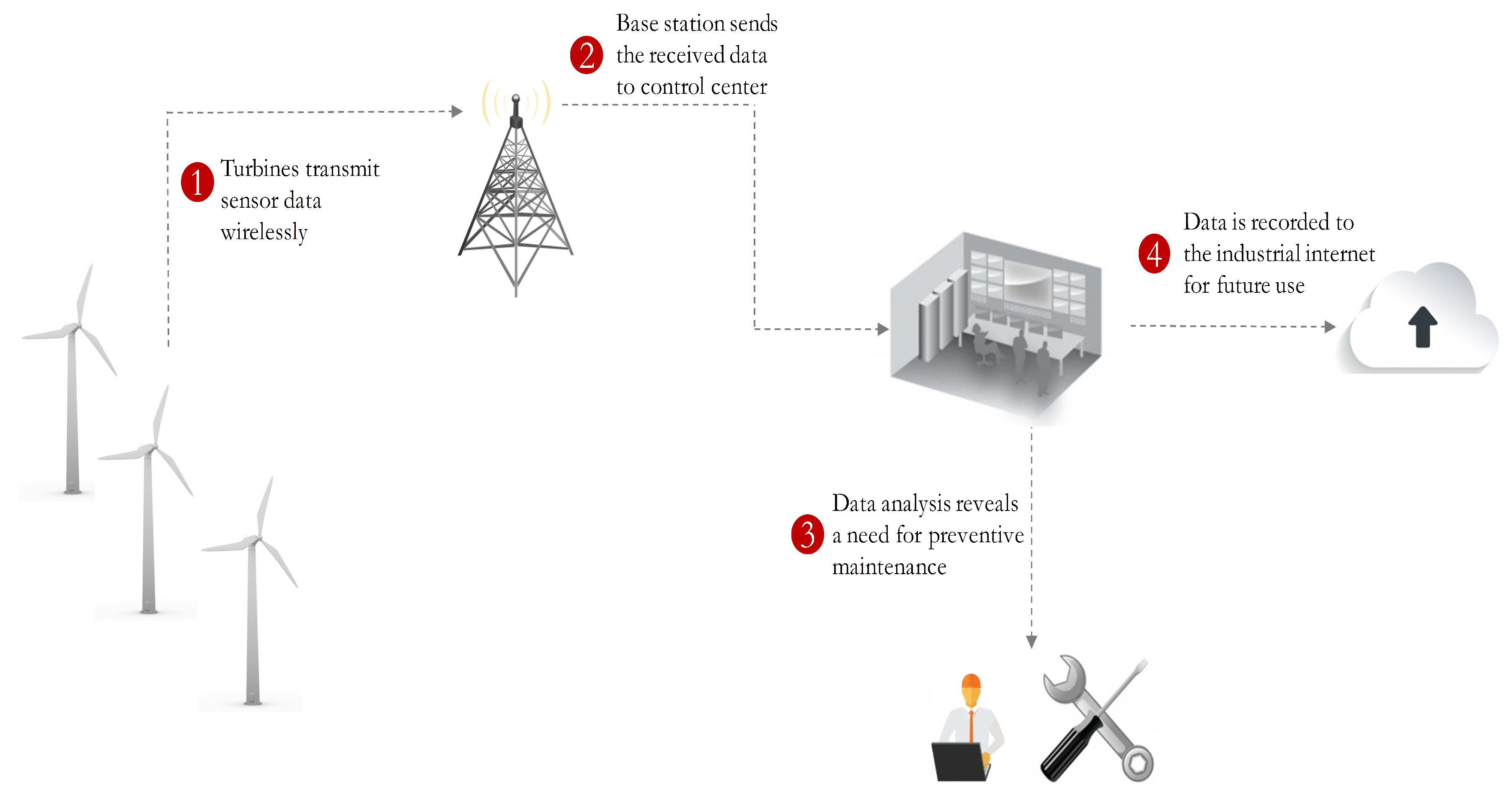
2. IoT Enabled Wind Energy Conversion System and State Space Model
3. Proposed Communication Framework
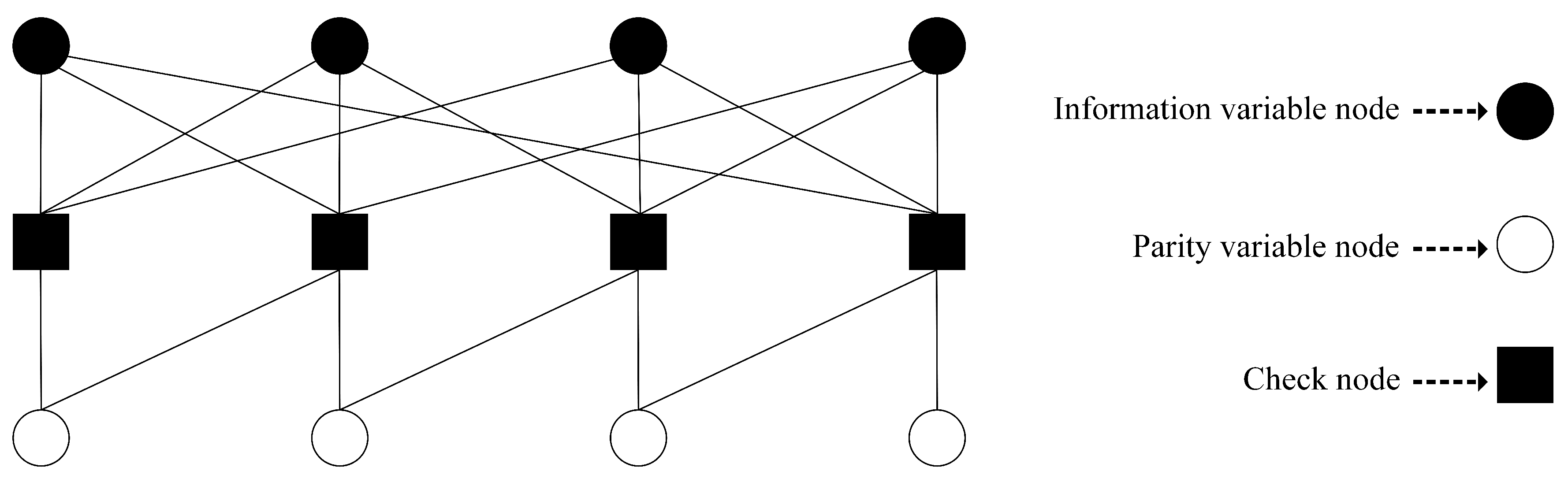
Repeat Accumulate (RA) Codes
Belief Propagation Decoding
- → set of variable nodes that have connection/edge with the check node.
- → set of check nodes that have connection/edge with the variable node.
- → LLR message sent from variable node m to check node n at iteration ℓ.
- → LLR message sent from check node n to variable node m at iteration ℓ.
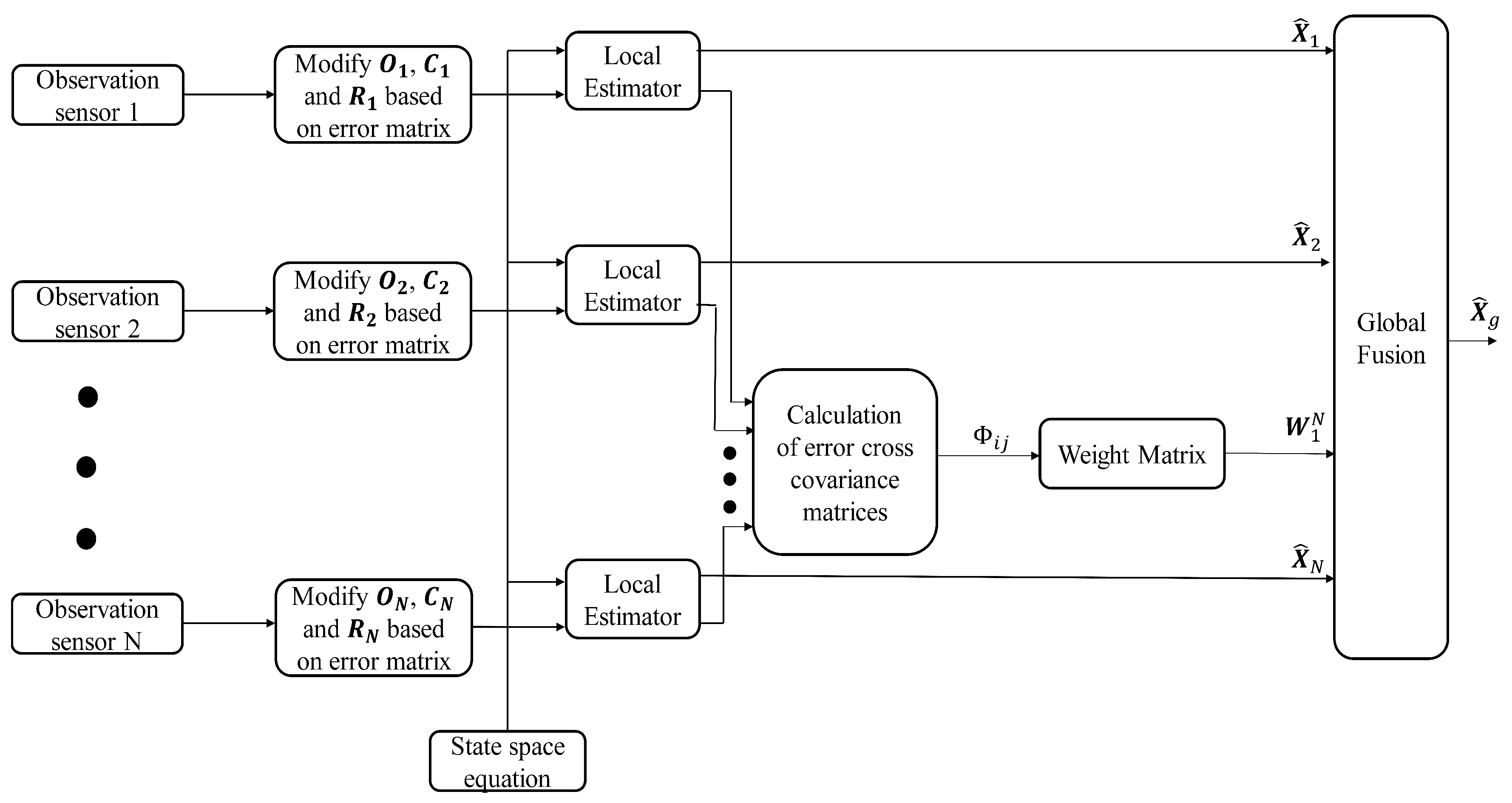
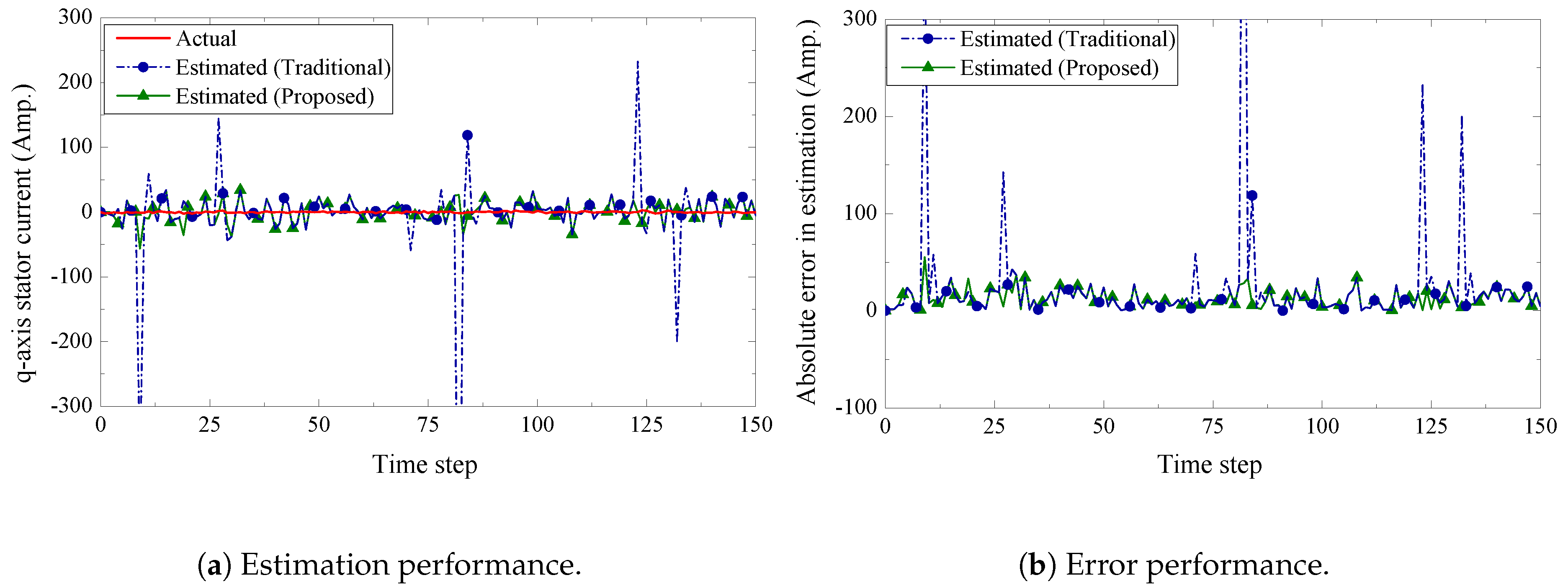
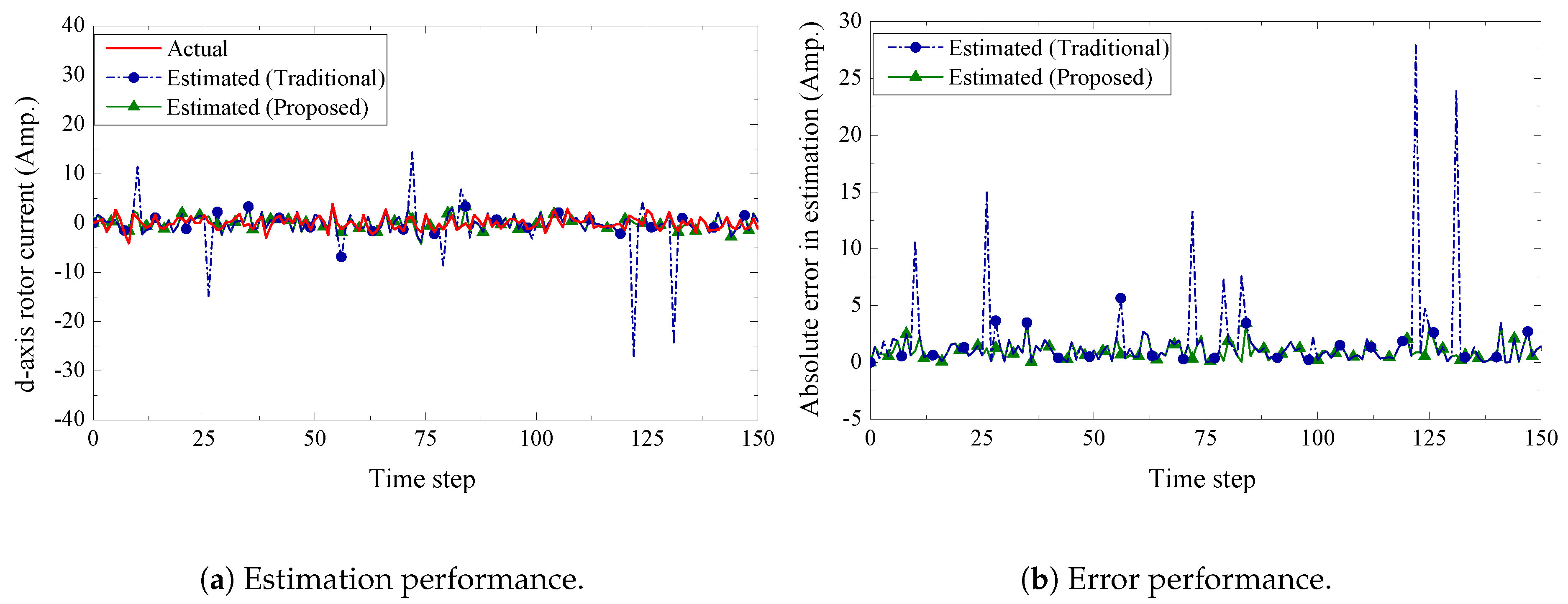
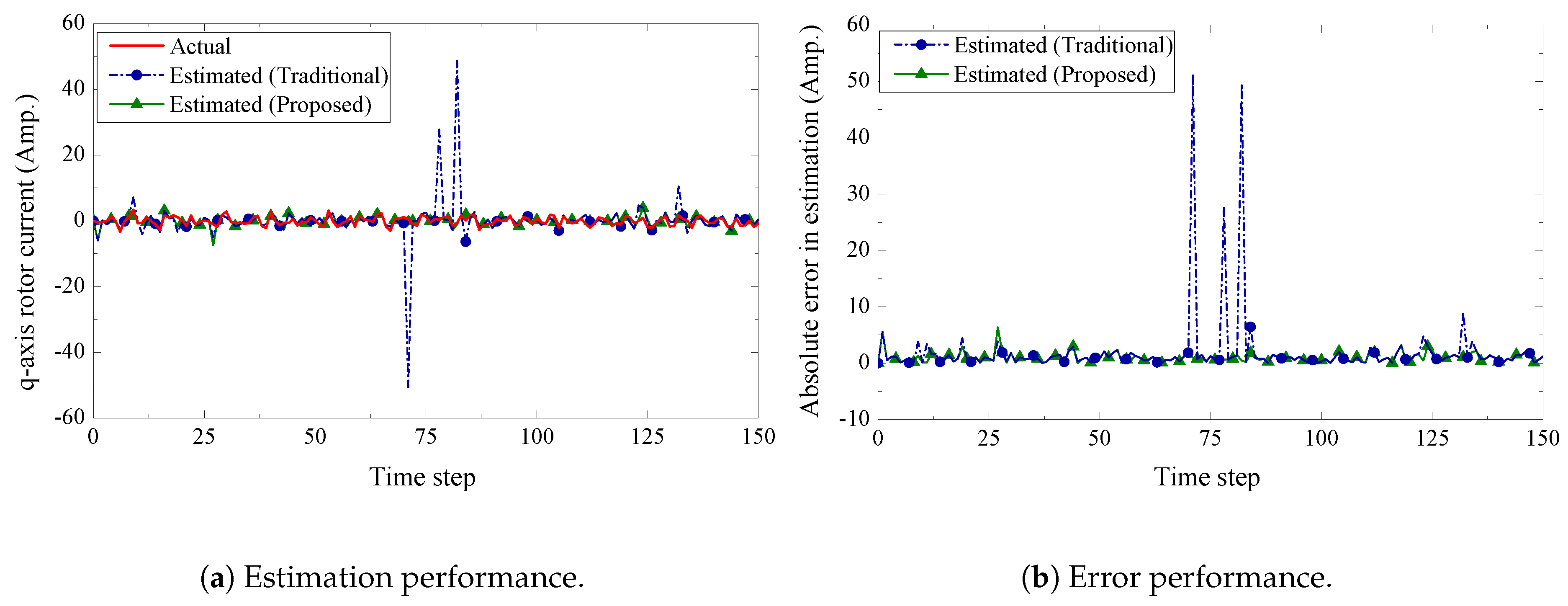
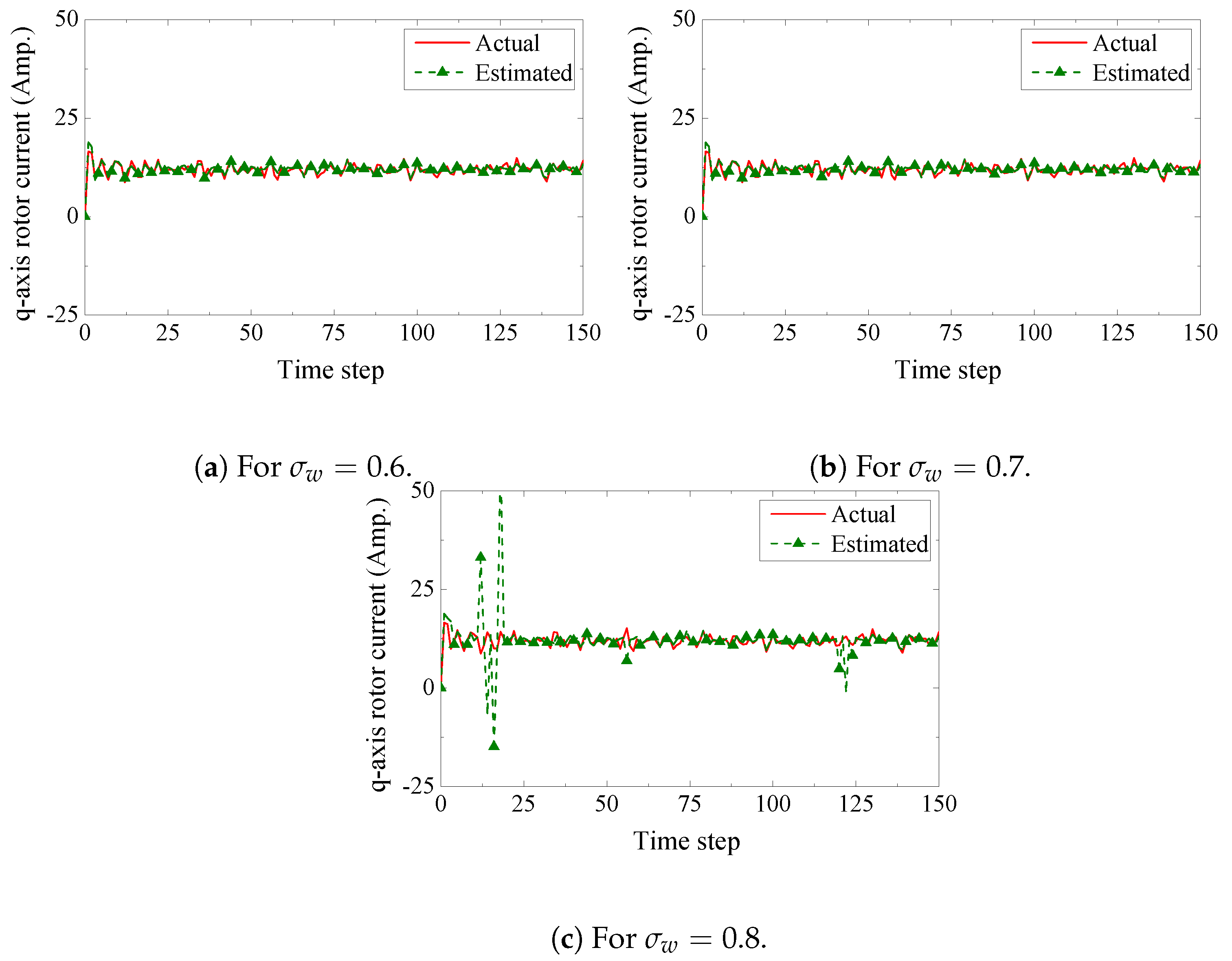
4. Proposed Sensor Fusion Technique
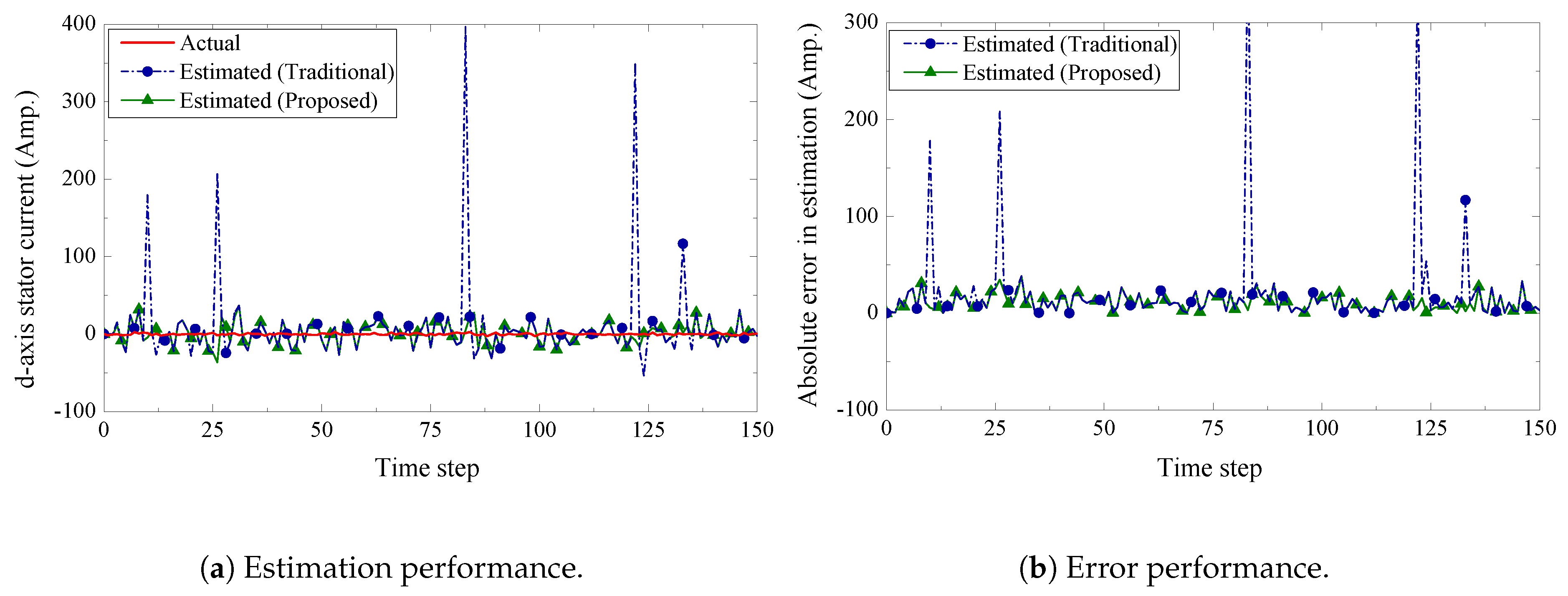
5. Performance Evaluations
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Moradi, H.; Vossoughi, G. Robust control of the variable speed wind turbines in the presence of uncertainties: A comparison between H? and PID controllers. Energy 2015, 90, 1508–1521. [Google Scholar] [CrossRef]
- Najafi Khoshrodi, M.; Jannati, M.; Sutikno, T. A Review of Wind Speed Estimation for Wind Turbine Systems Based on Kalman Filter Technique. Int. J. Electr. Comput. Eng. 2016, 6, 1406–1411. [Google Scholar] [CrossRef]
- Xu, L.D.; He, W.; Li, S. Internet of Things in Industries: A Survey. IEEE Trans. Ind. Inf. 2014, 10, 2233–2243. [Google Scholar] [CrossRef]
- Zanella, A.; Bui, N.; Castellani, A.; Vangelista, L.; Zorzi, M. Internet of Things for Smart Cities. IEEE Internet Things J. 2014, 1, 22–32. [Google Scholar] [CrossRef]
- Al-Fuqaha, A.; Guizani, M.; Mohammadi, M.; Aledhari, M.; Ayyash, M. Internet of Things: A Survey on Enabling Technologies, Protocols, and Applications. IEEE Commun. Surv. Tutor. 2015, 17, 2347–2376. [Google Scholar] [CrossRef]
- Berg, J.C.; Miller, K. Sensor Selection for Wind Turbine State Estimation. In Proceedings of the ITEA Live-Virtual-Constructive Conference, Orlando, FL, USA, 1–4 December 2008. [Google Scholar]
- Soltani, M.N.; Knudsen, T.; Svenstrup, M.; Wisniewski, R.; Brath, P.; Ortega, R.; Johnson, K. Estimation of Rotor Effective Wind Speed: A Comparison. IEEE Trans. Control Syst. Technol. 2013, 21, 1155–1167. [Google Scholar] [CrossRef]
- Ritter, B.; Schild, A.; Feldt, M.; Konigorski, U. The design of nonlinear observers for wind turbine dynamic state and parameter estimation. J. Phys. Conf. Ser. 2016, 753, 52029. [Google Scholar] [CrossRef] [Green Version]
- Petar, M.; Petrovi, V.; Baotic, M. Dual Kalman Estimation of Wind Turbine States and Parameters. In Proceedings of the International Conference on Process Control, Tatranska Lomnica, Slovakia, 14–17 June 2011; pp. 85–91. [Google Scholar]
- Bourlis, D.; Bleijs, J.A.M. A wind speed estimation method using adaptive Kalman filtering for a variable speed stall regulated wind turbine. In Proceedings of the 2010 IEEE 11th International Conference on Probabilistic Methods Applied to Power Systems, Singapore, 14–17 June 2010; pp. 89–94. [Google Scholar] [CrossRef]
- Miranda-Blanco, B.N.; Díaz-Dorado, E.; Carrillo, C.; Cidrás, J. State estimation for wind farms including the wind turbine generator models. Renew. Energy 2014, 71, 453–465. [Google Scholar] [CrossRef]
- Sudev, P.; Anita, J.P.; Sudheesh, P. Nonlinear state estimation of wind turbine. In Proceedings of the International Conference on Advances in Computing, Communications and Informatics (ICACCI), Udupi, India, 13–16 September 2017; pp. 354–358. [Google Scholar] [CrossRef]
- Yu, S.; Fernando, T.; Emami, K.; Iu, H.H.C. Dynamic State Estimation Based Control Strategy for DFIG Wind Turbine Connected to Complex Power Systems. IEEE Trans. Power Syst. 2016. [Google Scholar] [CrossRef]
- Yu, S.; Emami, K.; Fernando, T.; Iu, H.H.C.; Wong, K.P. State Estimation of Doubly Fed Induction Generator Wind Turbine in Complex Power Systems. IEEE Trans. Power Syst. 2016, 31, 4935–4944. [Google Scholar] [CrossRef]
- Prajapat, G.P.; Bhui, P.; Senroy, N.; Kar, I.N. Modelling and estimation of gear train backlash present in wind turbine driven DFIG system. IET Gener. Transm. Distrib. 2018, 12, 3527–3535. [Google Scholar] [CrossRef]
- Shahriari, S.A.A.; Raoofat, M.; Dehghani, M.; Mohammadi, M.; Saad, M. Dynamic state estimation of a permanent magnet synchronous generator-based wind turbine. IET Renew. Power Gener. 2016, 10, 1278–1286. [Google Scholar] [CrossRef]
- Shahinzadeh, H.; Moradi, J.; Gharehpetian, G.B.; Nafisi, H.; Abedi, M. IoT Architecture for Smart Grids. In Proceedings of the 2019 IEEE International Conference on Protection and Automation of Power System (IPAPS), Tehran, Iran, 8–9 January 2019; pp. 22–30. [Google Scholar] [CrossRef]
- Sun, S.L.; Deng, Z.L. Multi-sensor optimal information fusion Kalman filter. Automatica 2004, 40, 1017–1023. [Google Scholar] [CrossRef]
- Deng, Z.L.; Gao, Y.; Mao, L.; Li, Y.; Hao, G. New approach to information fusion steady-state Kalman filtering. Automatica 2005, 41, 1695–1707. [Google Scholar] [CrossRef]
- Chen, B.; Hu, G.; Ho, D.W.C.; Zhang, W.A.; Yu, L. Distributed Robust Fusion Estimation with Application to State Monitoring Systems. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2994–3005. [Google Scholar] [CrossRef]
- Tian, T.; Sun, S.; Li, N. Multi-sensor information fusion estimators for stochastic uncertain systems with correlated noises. Inf. Fusion 2016, 27, 126–137. [Google Scholar] [CrossRef]
- Chen, B.; Hu, G.; Ho, D.W.; Yu, L. A New Approach to Linear/Nonlinear Distributed Fusion Estimation Problem. IEEE Trans. Autom. Control 2019, 64, 1301–1308. [Google Scholar] [CrossRef]
- Chen, B.; Ho, D.W.C.; Zhang, W.A.; Yu, L. Networked Fusion Estimation With Bounded Noises. IEEE Trans. Autom. Control 2017, 62, 5415–5421. [Google Scholar] [CrossRef]
- Ma, J.; Sun, S. Distributed fusion filter for networked stochastic uncertain systems with transmission delays and packet dropouts. Signal Process. 2017, 130, 268–278. [Google Scholar] [CrossRef]
- Froese, M. Talking with Turbines through the Internet of Things. 2016. Available online: https://www.windpowerengineering.com/wind-farm-networks/talking-turbines-internet-things/ (accessed on 27 March 2019).
- Masoud Barakati, S. Modeling and Controller Design of a Wind Energy Conversion System Including a Matrix Converter. 2008, p. 264. Available online: http://hdl.handle.net/10012/3786 (accessed on 27 March 2019).
- Barakati, S.; Kazerani, M.; Aplevich, J. Maximum Power Tracking Control for a Wind Turbine System Including a Matrix Converter. IEEE Trans. Energy Convers. 2009, 24, 705–713. [Google Scholar] [CrossRef]
- Ugalde-Loo, C.E.; Ekanayake, J.B.; Jenkins, N. State-Space Modeling of Wind Turbine Generators for Power System Studies. IEEE Trans. Ind. Appl. 2013, 49, 223–232. [Google Scholar] [CrossRef]
- Ugalde-Loo, C.E.; Ekanayake, J.B. State-space modelling of variable-speed wind turbines: A systematic approach. In Proceedings of the IEEE International Conference on Sustainable Energy Technologies (ICSET), Paris, France, 6–9 December 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Noor-A-Rahim, M.; Khyam, M.O.; Ali, G.G.M.N.; Liu, Z.; Pesch, D.; Chong, P.H.J. Reliable State Estimation of an Unmanned Aerial Vehicle Over a Distributed Wireless IoT Network. IEEE Trans. Reliab. 2019, 1–9. [Google Scholar] [CrossRef]
- Chung, S.-Y.; Forney, G.; Richardson, T.; Urbanke, R. On the design of low-density parity-check codes within 0.0045 dB of the Shannon limit. IEEE Commun. Lett. 2001, 5, 58–60. [Google Scholar] [CrossRef] [Green Version]
- Ten Brink, S.; Kramer, G.; Ashikhmin, A. Design of Low-Density Parity-Check Codes for Modulation and Detection. IEEE Trans. Commun. 2004, 52, 670–678. [Google Scholar] [CrossRef]
- Ten Brink, S.; Kramer, G. Design of repeat-accumulate codes for iterative detection and decoding. IEEE Trans. Signal Process. 2003, 51, 2764–2772. [Google Scholar] [CrossRef]
- Noor-A-Rahim, M.; Zhang, N.; Wang, S. Performance estimation of finite-length repeat–accumulate codes. IET Commun. 2015, 9, 1902–1905. [Google Scholar] [CrossRef]
- Noor-A-Rahim, M.; Khyam, M.O.; Guan, Y.L.; Ali, G.G.N.; Nguyen, K.D.; Lechner, G. Delay-Universal Channel Coding with Feedback. IEEE Access 2018. [Google Scholar] [CrossRef]
- Chung, S.Y.; Richardson, T.J.; Urbanke, R.L.; Chung, S.Y.; Richardson, T.J.; Urbanke, R.L. Analysis of sum-product decoding of low-density parity-check codes using a {Gaussian} approximation. IEEE Trans. Inform. Theory 2001, 47, 657–670. [Google Scholar] [CrossRef]
- Johnson, S.J. Iterative Error Correction: Turbo, Low-Density Parity-Check and Repeat-Accumulate Codes; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Simon, D. Kalman filtering with state constraints: A survey of linear and nonlinear algorithms. IET Control Theory Appl. 2010, 4, 1303–1318. [Google Scholar] [CrossRef]
- Faragher, R. Understanding the Basis of the Kalman Filter Via a Simple and Intuitive Derivation [Lecture Notes]. IEEE Signal Process. Mag. 2012, 29, 128–132. [Google Scholar] [CrossRef]
- Sun, S.l. Multi-sensor optimal information fusion Kalman filters with applications. Aerosp. Sci. Technol. 2004, 8, 57–62. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Works | Type of Wind Turbine | Filter Type | Sensor Fusion | Impact of Wireless Channel | Error Correction Technique |
|---|---|---|---|---|---|
| Berg et al. [6] | Generic | Linear Kalman | No | No | No |
| Ritter et al. [8] | Generic | Linear Kalman | No | No | No |
| Petar et al. [9] | Generic | Extended Kalman | No | No | No |
| Bourlis et al. [10] | Generic | Adaptive Kalman | No | No | No |
| Blanco et al. [11] | Generic | Extended Kalman | No | No | No |
| Sudev et al. [12] | Generic | Particle filter | No | No | No |
| Yu et al. [13] | DFIG | Unscented Kalman | No | No | No |
| Yu et al. [14] | DFIG | Unscented Kalman | No | No | No |
| Prajapat et al. [15] | DFIG | Unscented Kalman | No | No | No |
| Shahriari et al. [16] | PMSG | Extended Kalman | No | No | No |
| This work | Generic | Linear Kalman | Yes | Yes | Yes |
| Parameter | Value |
|---|---|
| Base frequency | 10 Hz |
| Stator frequency | 15 Hz |
| Rotor frequency | 15 Hz |
| Resistance of stator | 0.004 Ω |
| Resistance of rotor | 0.005 Ω |
| Reactance of stator | 0.09 Ω |
| Reactance of rotor | 0.08 Ω |
| Magnetizing reactance | 3.95 Ω |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Noor-A-Rahim, M.; Khyam, M.O.; Li, X.; Pesch, D. Sensor Fusion and State Estimation of IoT Enabled Wind Energy Conversion System. Sensors 2019, 19, 1566. https://doi.org/10.3390/s19071566
Noor-A-Rahim M, Khyam MO, Li X, Pesch D. Sensor Fusion and State Estimation of IoT Enabled Wind Energy Conversion System. Sensors. 2019; 19(7):1566. https://doi.org/10.3390/s19071566
Chicago/Turabian StyleNoor-A-Rahim, Md., M. O. Khyam, Xinde Li, and Dirk Pesch. 2019. "Sensor Fusion and State Estimation of IoT Enabled Wind Energy Conversion System" Sensors 19, no. 7: 1566. https://doi.org/10.3390/s19071566
APA StyleNoor-A-Rahim, M., Khyam, M. O., Li, X., & Pesch, D. (2019). Sensor Fusion and State Estimation of IoT Enabled Wind Energy Conversion System. Sensors, 19(7), 1566. https://doi.org/10.3390/s19071566