Intelligent Positioning for a Commercial Mobile Platform in Seamless Indoor/Outdoor Scenes based on Multi-sensor Fusion


Abstract
:1. Introduction
2. Related Work
2.1. Positioning Solution
2.2. Positioning Update
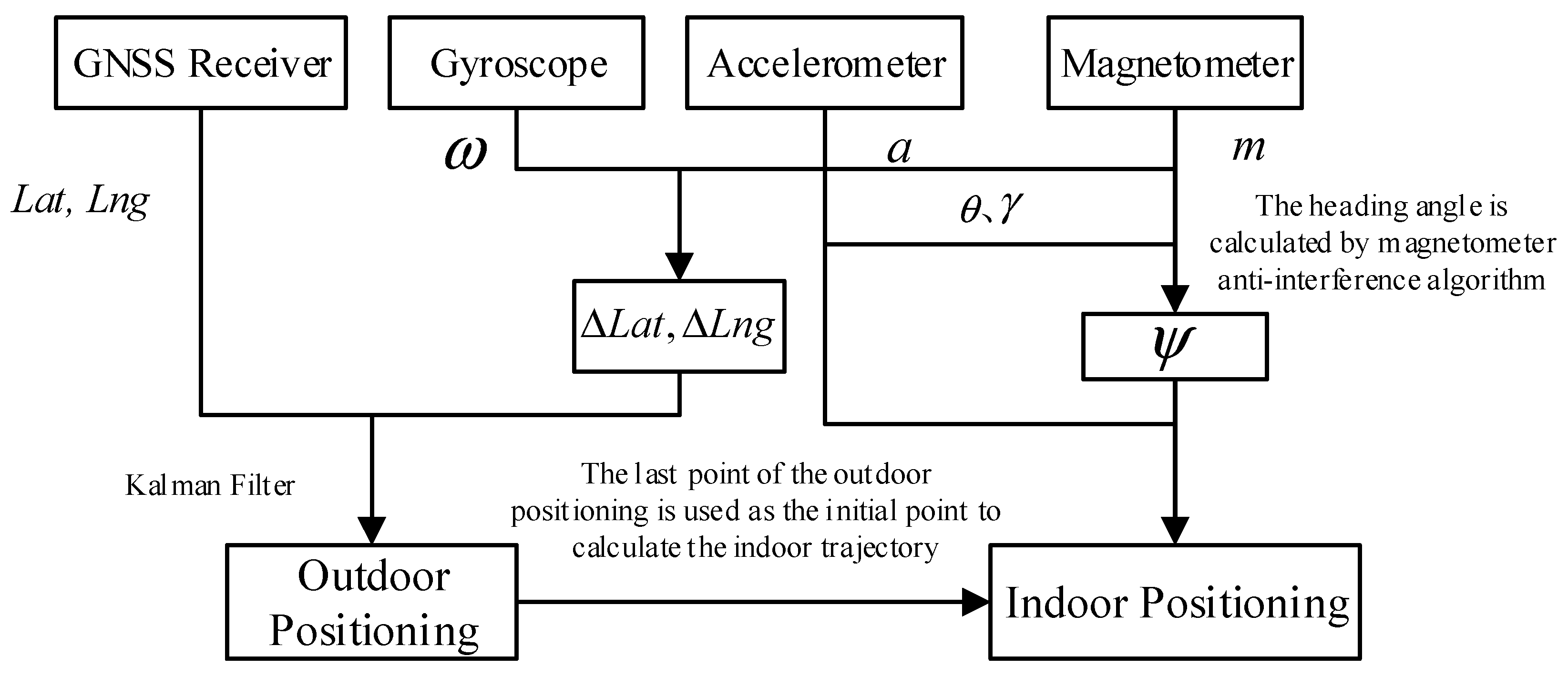
3. Correction Methods Involved in the Platform
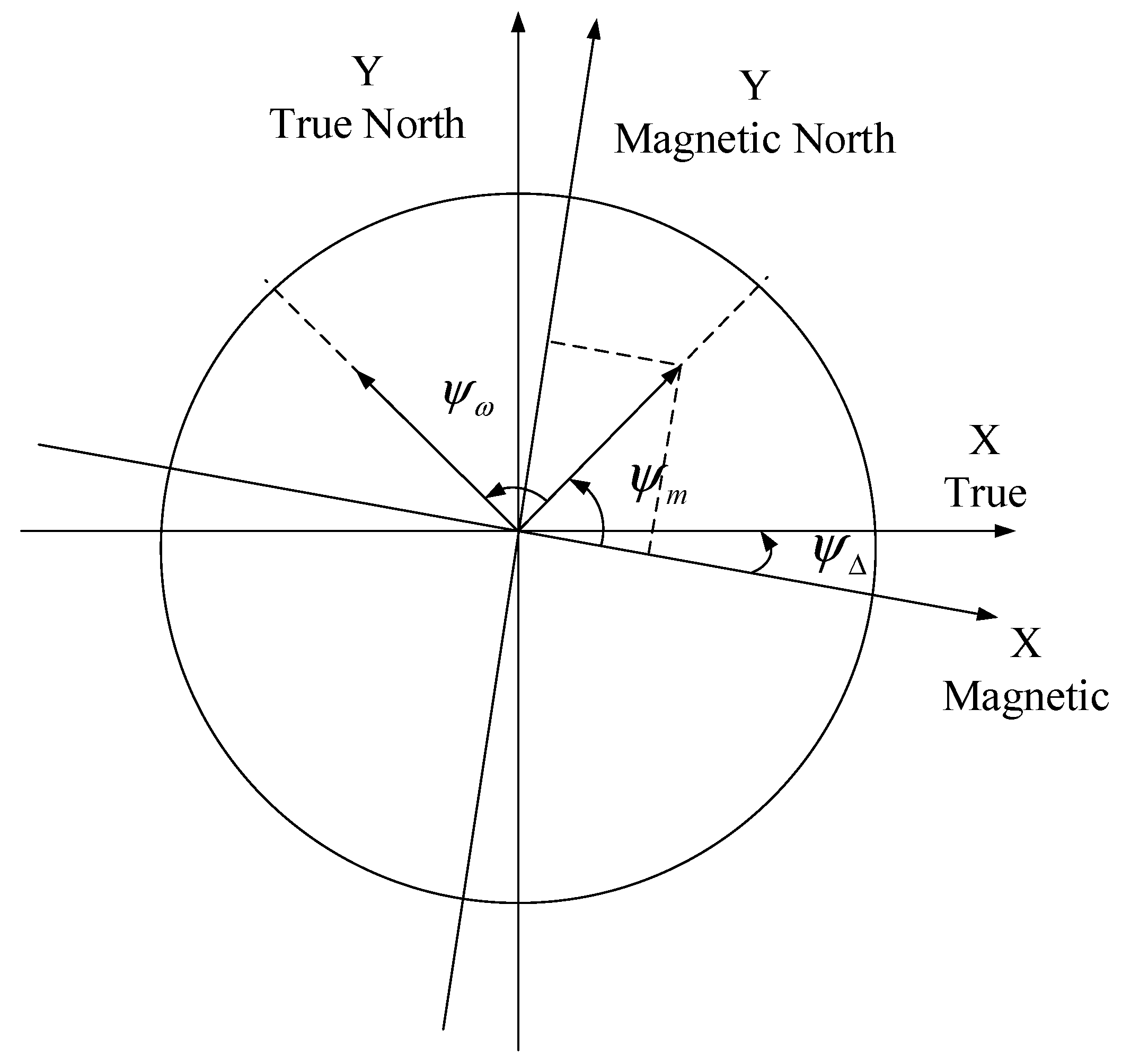
3.1. Calculation of Yaw Angle
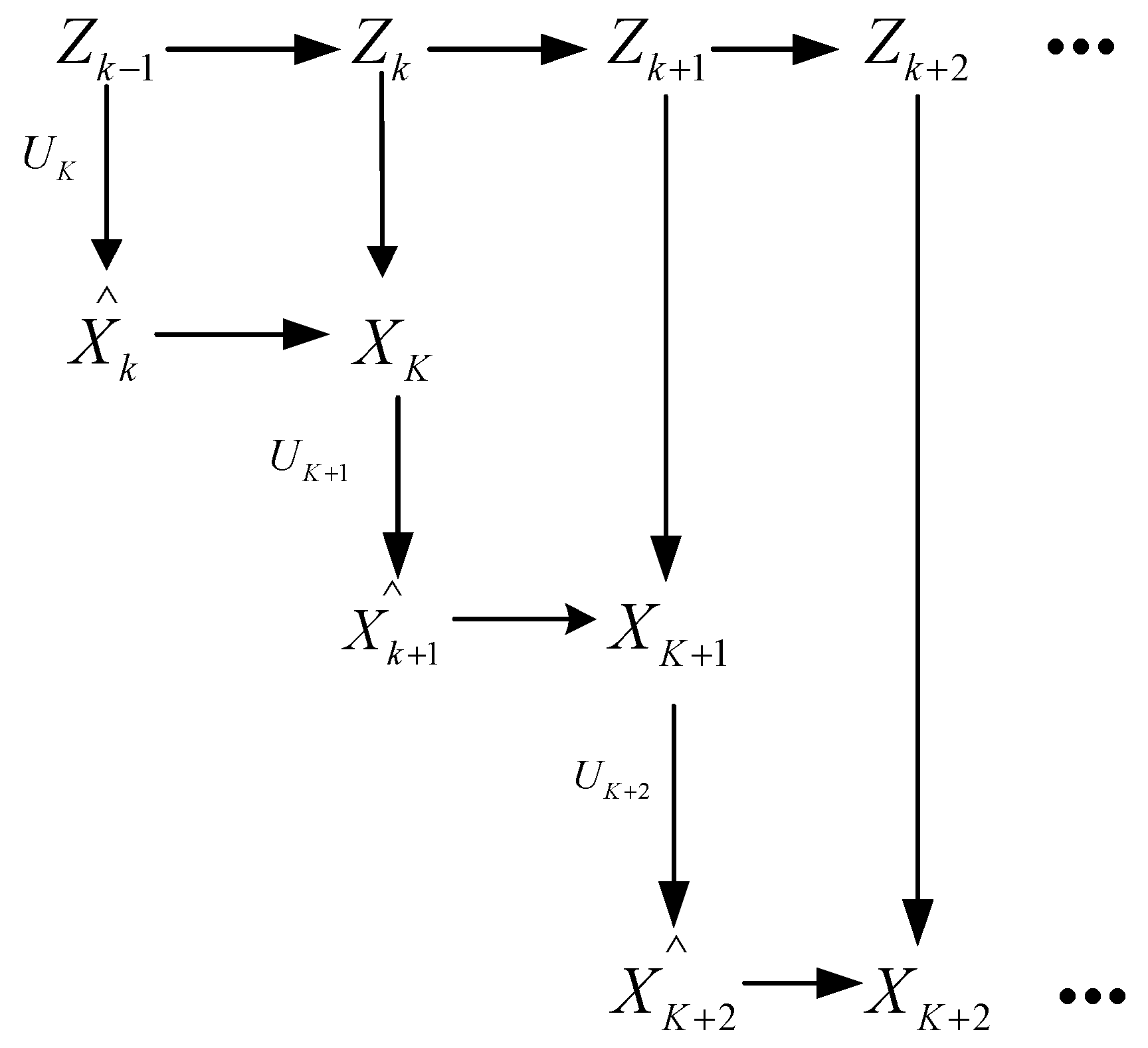
3.2. GNSS/INS Integration Based Kalman Filter
4. Experiment
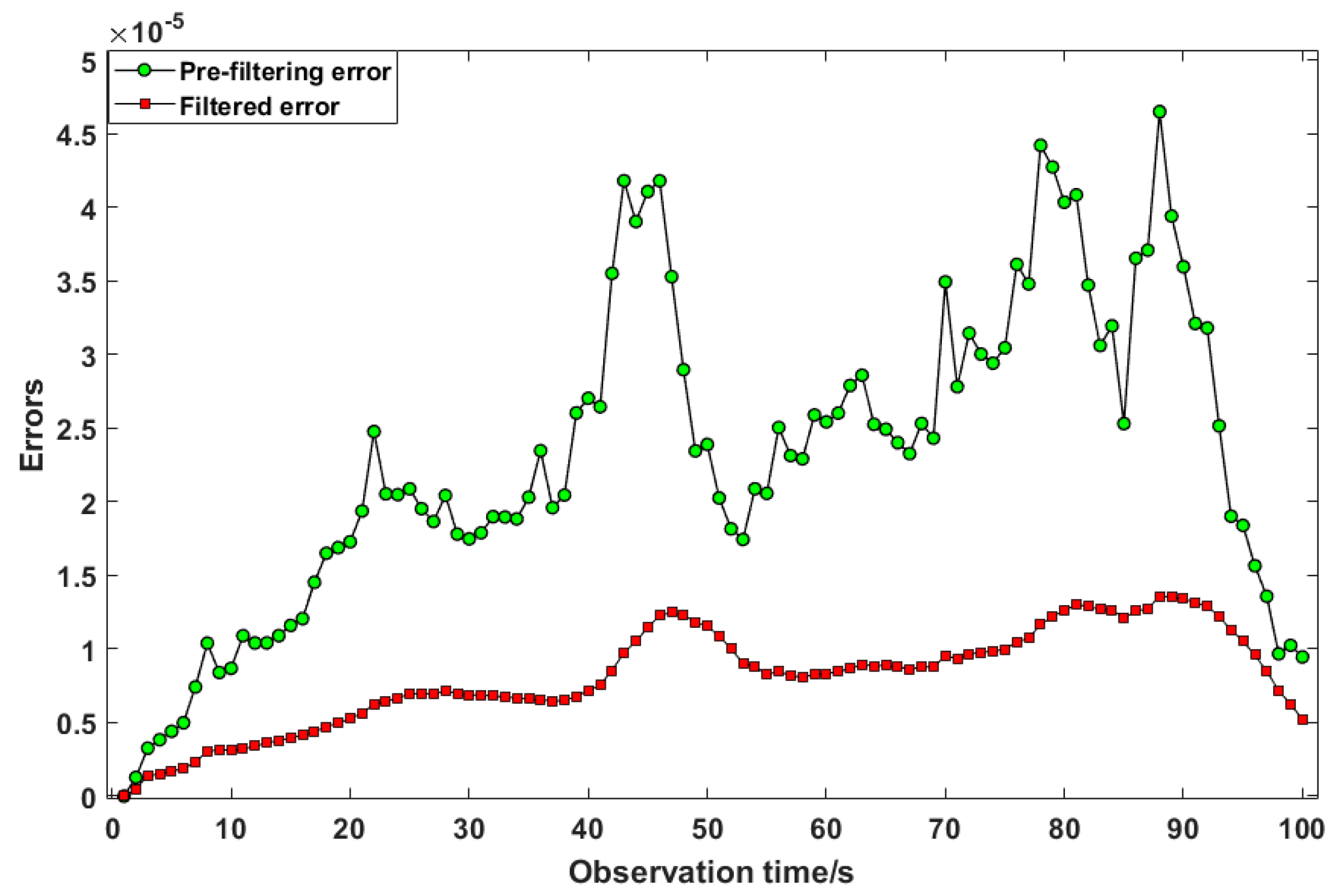
4.1. Experiment Result for GNSS/INS Filtering
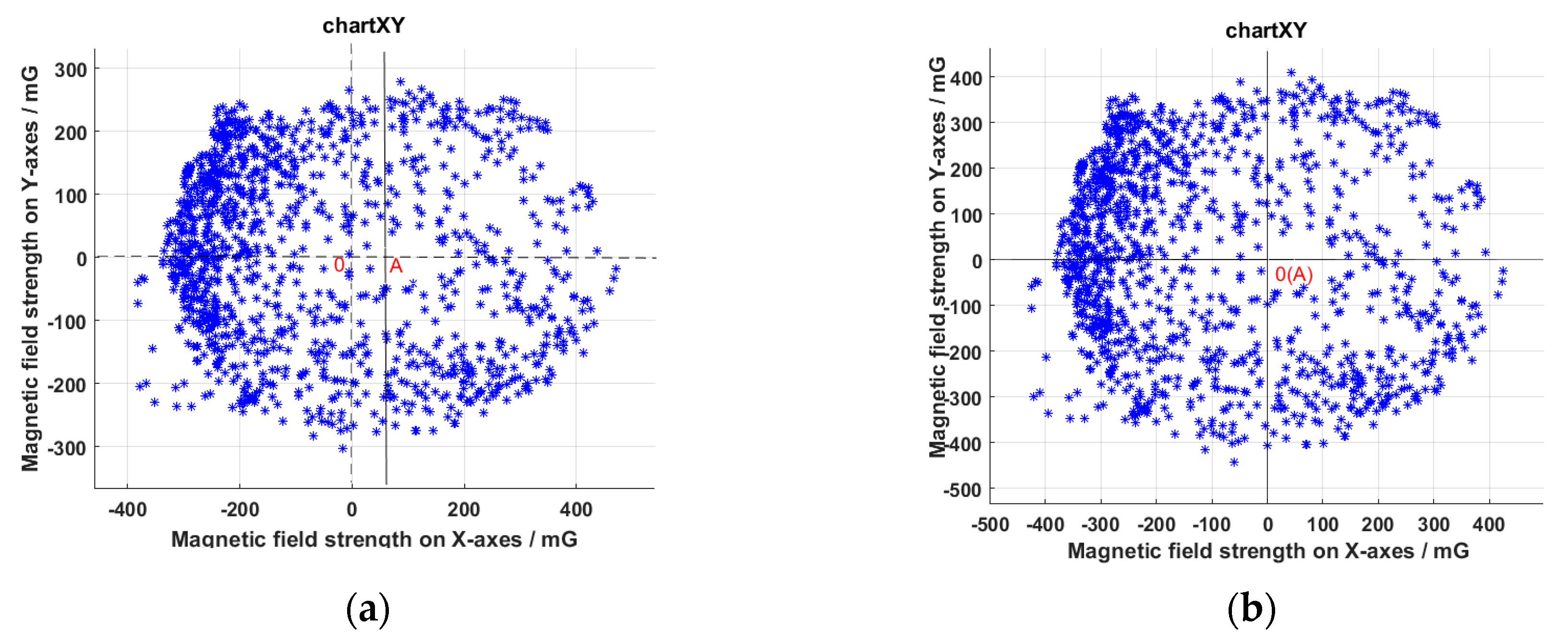
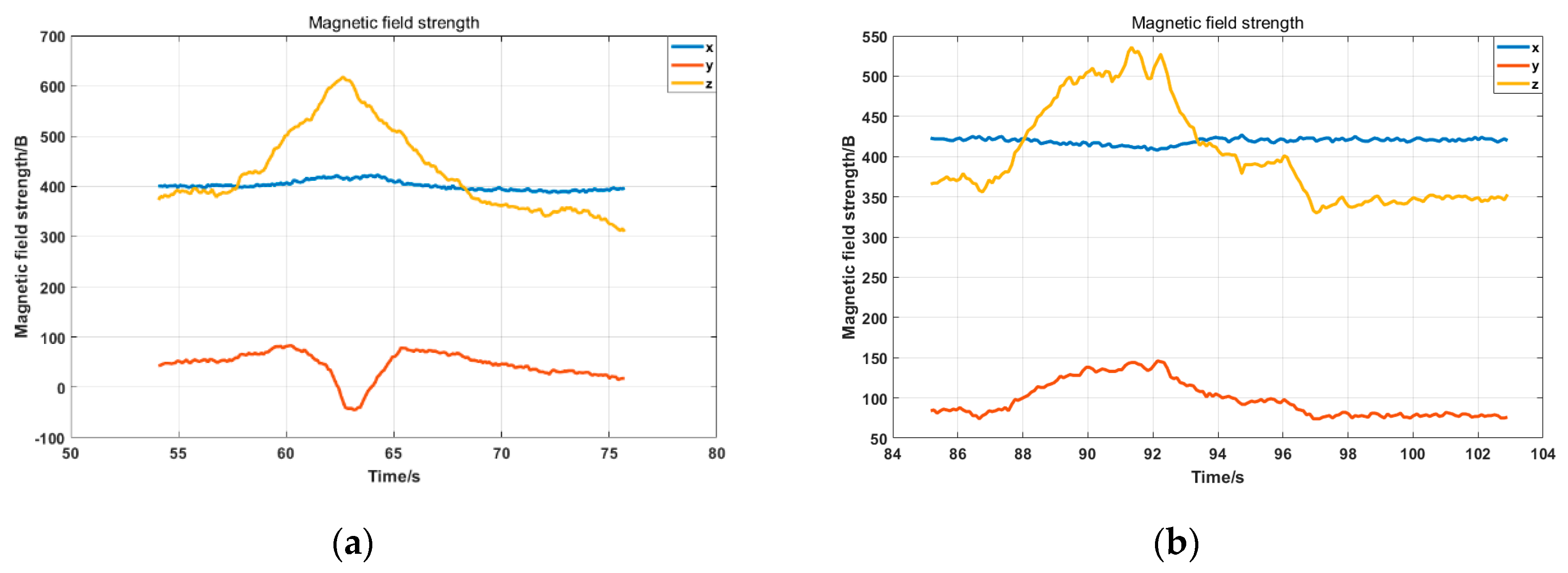
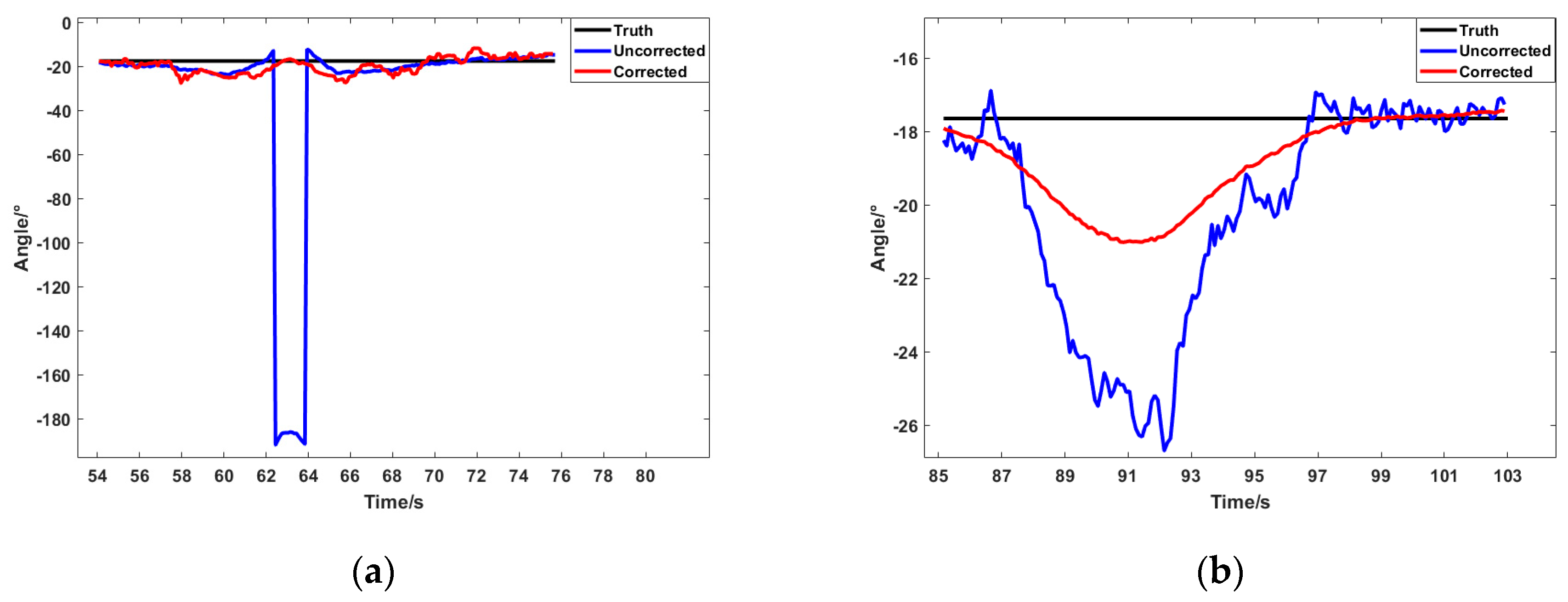
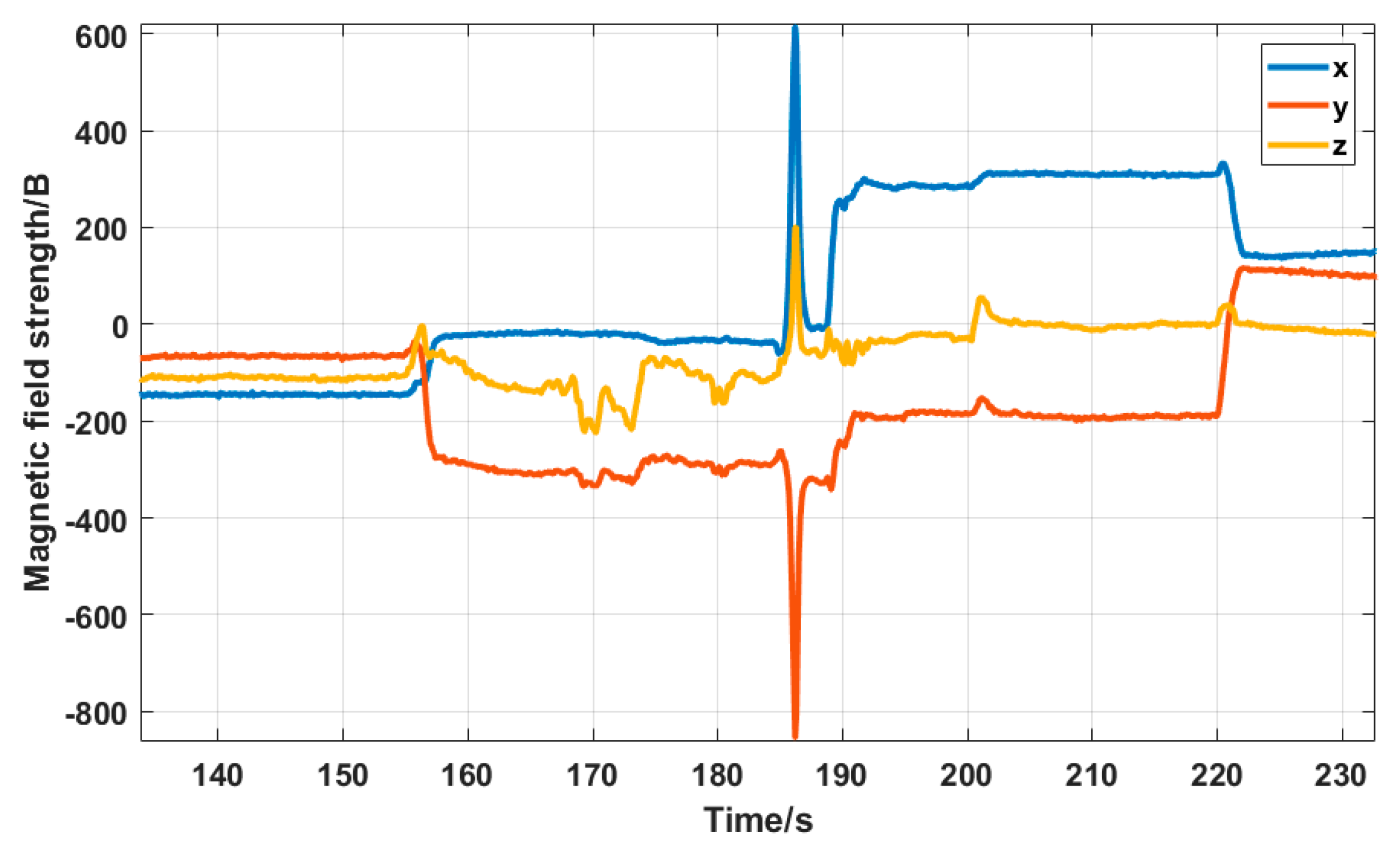
4.2. Experiment Result for Heading Angle Correction of Magnetometer
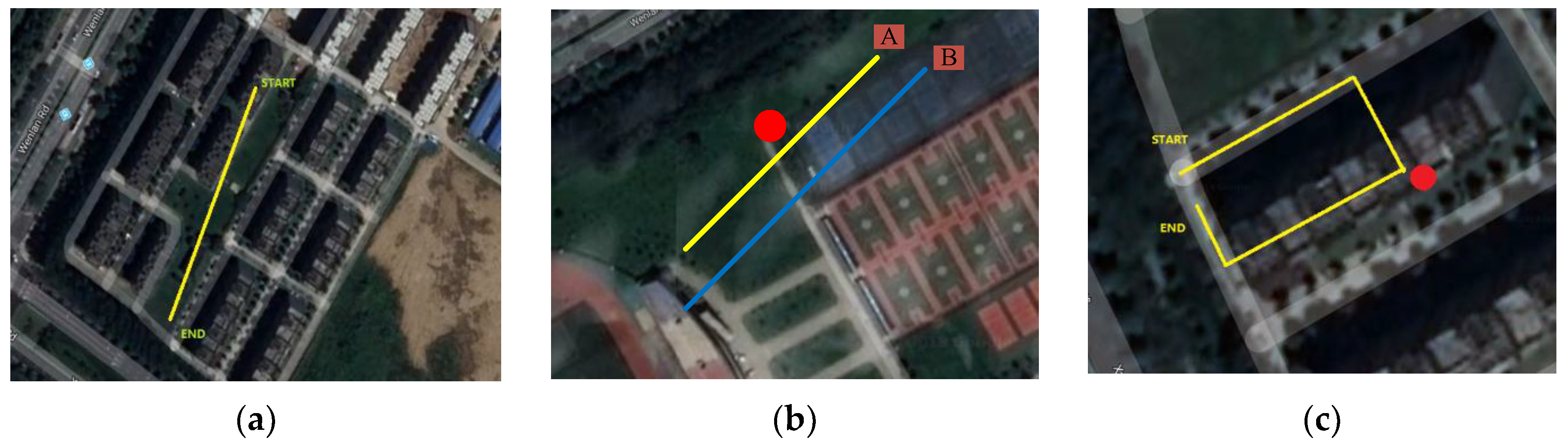
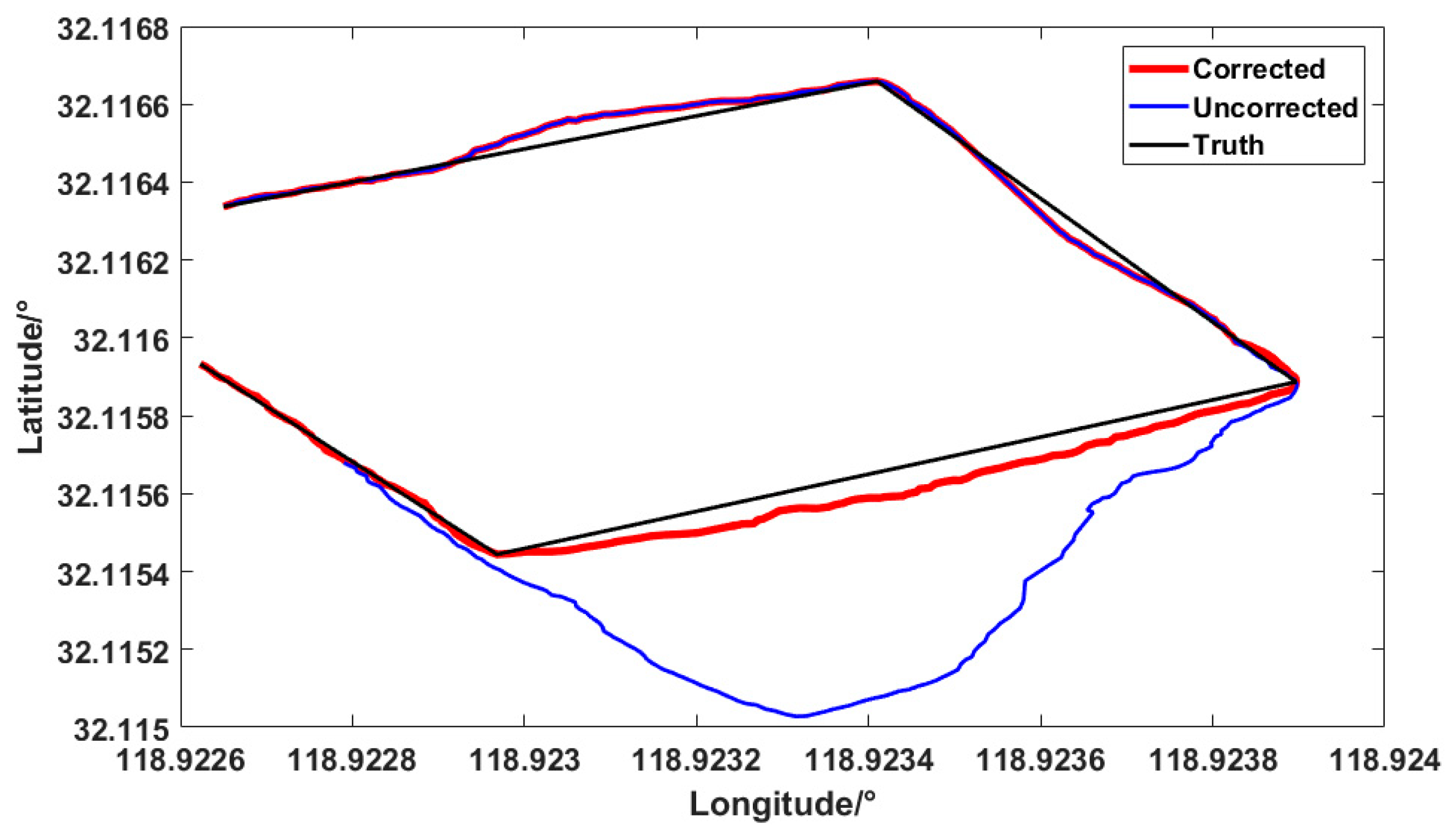
4.3. Experiment Result for the Performance of Platform Seamless Positioning
4.4. Discussions
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Song, X.; Li, X.; Tang, W.; Zhang, W. A fusion strategy for reliable vehicle positioning utilizing RFID and in-vehicle sensors. Inf. Fusion 2016, 31, 76–86. [Google Scholar] [CrossRef]
- Rantanen, J.; Ruotsalainen, L.; Kirkko-Jaakkola, M.; Mäkelä, M. Height measurement in seamless indoor/outdoor infrastructure-free navigation. IEEE Trans. Instrum. Meas. 2018, 99, 1–11. [Google Scholar] [CrossRef]
- Xu, Q.; Li, X.; Li, B.; Song, X.; Cai, Z. A Reliable Hybrid Positioning Methodology for Land Vehicles Using Low-Cost Sensors. IEEE Trans. Intell. Transp. Syst. 2016, 17, 834–847. [Google Scholar] [CrossRef]
- Wu, J.; Zhou, Z.; Fourati, H.; Cheng, Y. A Super Fast Attitude Determination Algorithm for Consumer-Level Accelerometer and Magnetometer. IEEE Trans. Consum. Electron. 2018, 64, 375–381. [Google Scholar] [CrossRef]
- Li, X.; Chen, W.; Chan, C. A reliable multisensor fusion strategy for land vehicle positioning using low-cost sensors. Proc. Inst. Mech. Eng. Part D J. Autom. Eng. 2014, 228, 1375–1397. [Google Scholar] [CrossRef]
- Williamson, W.; Rios, T.; Speyer, J.L. Carrier phase differential GPS/INS positioning for formation flight. In Proceedings of the American Control Conference, San Diego, CA, USA, 2–4 June 1999; pp. 3665–3670. [Google Scholar]
- Zhai, Y.; Zhao, H.; Zhao, M.; Jiao, S. Design of Electric Patrol UAVs Based on a Dual Antenna System. Energies 2018, 11, 866. [Google Scholar] [CrossRef]
- Ambati, P.R.; Padhi, R. Robust auto-landing of fixed-wing UAVs using neuro-adaptive design. Control Eng. Pract. 2017, 60, 218–232. [Google Scholar] [CrossRef]
- Daroogheha, S.; Lasky, T.A.; Ravani, B. Position Measurement Under Uncertainty Using Magnetic Field Sensing. IEEE Trans. Magn. 2018, 54, 1–8. [Google Scholar] [CrossRef]
- Mazaheri, A.; Radan, A. Performance evaluation of nonlinear Kalman filtering techniques in low speed brushless DC motors driven sensor-less positioning systems. Control Eng. Pract. 2017, 60, 148–156. [Google Scholar] [CrossRef]
- Hansen, J.M.; Fossen, T.I.; Johansen, T.A. Nonlinear observer design for GNSS-aided inertial navigation systems with time-delayed GNSS measurements. Control Eng. Pract. 2017, 60, 39–50. [Google Scholar] [CrossRef]
- Vochin, M.; Vulpe, A.; Boicescu, L.; Georgica Obreja, S.; Suciu, G. An Intelligent Low-Power Displaying System with Integrated Emergency Alerting Capability. Sensors 2019, 19, 666. [Google Scholar] [CrossRef]
- Qin, H.; Cong, L.; Sun, X. Accuracy improvement of GPS/MEMS-INS integrated navigation system during GPS signal outage for land vehicle navigation. J. Syst. Eng. Electron. 2012, 23, 256–264. [Google Scholar] [CrossRef]
- Jiang, C.; Zhang, S.B.; Zhang, Q.Z. Adaptive estimation of multiple fading factors for GPS/INS integrated navigation systems. Sensors 2017, 17, 1254. [Google Scholar] [CrossRef]
- Cho, S.Y.; Kim, B.D. Adaptive IIR/FIR fusion filter and its application to the INS/GPS integrated system. Automatica 2008, 44, 2040–2047. [Google Scholar] [CrossRef]
- Chiang, K.W.; Huang, Y.W.; Li, C.Y.; Chang, H.W. An ANN embedded RTS smoother for an INS/GPS integrated positioning and orientation system. Appl. Soft Comput. 2011, 11, 2633–2644. [Google Scholar] [CrossRef]
- Li, Z.; Wang, J.; Li, B.; Gao, J.; Tan, X. GPS/INS/Odometer integrated system using fuzzy neural network for land vehicle navigation applications. J. Navig. 2014, 67, 967–983. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, S.; Atia, M.M.; Noureldin, A. INS/GPS/LiDAR integrated navigation system for urban and indoor environments using hybrid scan matching algorithm. Sensors 2015, 15, 23286–23302. [Google Scholar] [CrossRef] [PubMed]
- Xu, X.; Wang, Y.; Xu, H.; Tong, X.; Liu, X.; Tang, J. A Framework for GPS/INS based Portable Positioning System. In Proceedings of the 2012 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Seoul, Korea, 14–17 October 2012; pp. 2495–2499. [Google Scholar]
- Park, S.G.; Jeong, H.C.; Kim, J.W.; Hwang, D.H.; Lee, S.J. Magnetic compass fault detection method for GPS/INS/magnetic compass integrated navigation systems. Int. J. Control Autom. Syst. 2011, 9, 276. [Google Scholar] [CrossRef]
- Li, G.; Geng, E.; Ye, Z.; Xu, Y.; Lin, J.; Pang, Y. Indoor Positioning Algorithm Based on the Improved RSSI Distance Model. Sensors 2018, 18, 2820. [Google Scholar] [CrossRef]
- Gao, S.; Zhong, Y.; Zhang, X.; Shirinzadeh, B. Multi-sensor optimal data fusion for INS/GPS/SAR integrated navigation system. Aerosp. Sci. Technol. 2009, 13, 232–237. [Google Scholar] [CrossRef]
- Pasku, V.; De Angelis, A.; De Angelis, G.; Arumugam, D.D.; Dionigi, M.; Carbone, P.; Moschitta, A.; Ricketts, D.S. Magnetic field based positioning systems. IEEE Commun. Surv. Tutor. 2017, 19, 2003–2017. [Google Scholar] [CrossRef]
- Han, S.; Wang, J. Integrated GPS/INS navigation system with dual-rate Kalman Filter. GPS Solut. 2012, 16, 389–404. [Google Scholar] [CrossRef]
- Seo, J.; Lee, H.K.; Lee, J.G.; Park, C.G. Lever arm compensation for GPS/INS/odometer integrated system. Int. J. Control Autom. Syst. 2006, 4, 247–254. [Google Scholar]
- Zhang, G.; Hsu, L.T. Intelligent GNSS/INS integrated navigation system for a commercial UAV flight control system. Aerosp. Sci. Technol. 2018, 80, 368–380. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GNSS Observation | Kalman Filter | |
|---|---|---|
| Mean of positioning error (m) | 1.6025 | 0.5626 |
| STD of positioning error (m) | 0.7 | 0.22 |
| Uncorrected | Corrected | |
|---|---|---|
| Mean of angle error (°) | 13.4502 | 2.1278 |
| STD of angle error (°) | 42.9705 | 3.7276 |
| Uncorrected | Corrected | |
|---|---|---|
| Mean of angle error (°) | 2.4670 | 1.2207 |
| STD of angle error (°) | 2.9812 | 1.2267 |
| Uncorrected | Corrected | |
|---|---|---|
| Mean of positioning error (m) | 8.45 | 1.73 |
| STD of positioning error (m) | 10.77 | 1.44 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Lu, Y.; Zhang, L.; Jiang, G. Intelligent Positioning for a Commercial Mobile Platform in Seamless Indoor/Outdoor Scenes based on Multi-sensor Fusion. Sensors 2019, 19, 1696. https://doi.org/10.3390/s19071696
Wang D, Lu Y, Zhang L, Jiang G. Intelligent Positioning for a Commercial Mobile Platform in Seamless Indoor/Outdoor Scenes based on Multi-sensor Fusion. Sensors. 2019; 19(7):1696. https://doi.org/10.3390/s19071696
Chicago/Turabian StyleWang, Dongsheng, Yongjie Lu, Lei Zhang, and Guoping Jiang. 2019. "Intelligent Positioning for a Commercial Mobile Platform in Seamless Indoor/Outdoor Scenes based on Multi-sensor Fusion" Sensors 19, no. 7: 1696. https://doi.org/10.3390/s19071696
APA StyleWang, D., Lu, Y., Zhang, L., & Jiang, G. (2019). Intelligent Positioning for a Commercial Mobile Platform in Seamless Indoor/Outdoor Scenes based on Multi-sensor Fusion. Sensors, 19(7), 1696. https://doi.org/10.3390/s19071696