Extended Target Tracking and Feature Estimation for Optical Sensors Based on the Gaussian Process


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. GP Theory
2.1. Basic GP
2.2. GP Regression
2.3. Recursive GPR
2.4. Covariance Function Modification
3. EKF Model
3.1. Measurement Amplitude Modification
3.2. Measurement Model with Amplitude
3.3. Motion Model
4. Simulation and Analysis
4.1. Simulation Setting
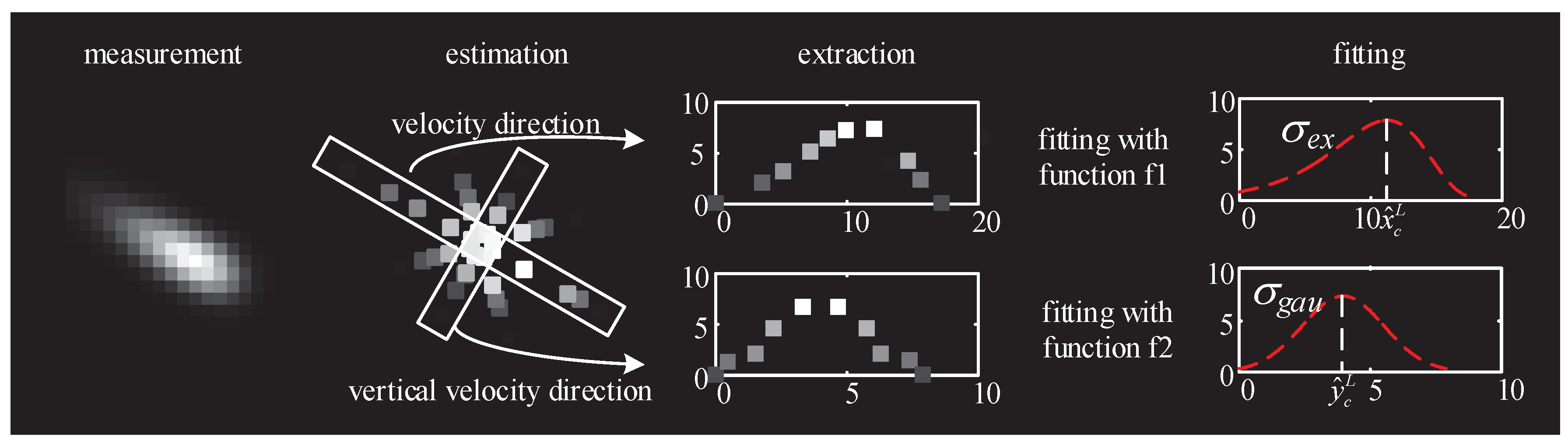
4.2. Feature Estimation Steps
4.3. Shape Deformation
4.4. Motion Change
4.5. Intensity Change
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gilholm, K.; Maskell, S.; Salmond, D.; Godsill, S. Poisson models for extended target and group tracking. In Proceedings of the Signal and Data Processing of Small Targets 2005, San Diego, CA, USA, 31 July–4 August 2005. [Google Scholar]
- Granström, K.; Lundquist, C.; Orguner, U. A gaussian mixture phd filter for extended target tracking. In Proceedings of the IEEE International Conference on Information Fusion, Edinburgh, UK, 26–29 July 2011. [Google Scholar]
- Orguner, U. A variational measurement update for extended target tracking with random matrices. IEEE Trans. Signal Process. 2012, 60, 3827–3834. [Google Scholar] [CrossRef]
- Feldmann, M.; Franken, D.; Koch, W. Tracking of extended objects and group targets using random matrices. IEEE Trans. Signal Process. 2011, 59, 1409–1420. [Google Scholar] [CrossRef]
- Koch, W. Bayesian approach to extended object and cluster tracking using random matrices. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 1042–1059. [Google Scholar] [CrossRef]
- Lan, J.; Li, X.R. Tracking of extended object or target group using random matrix—Part I: New model and approach. In Proceedings of the International Conference on Information Fusion, Singapore, 9–12 July 2012; pp. 2177–2184. [Google Scholar]
- Schuster, M.; Reuter, J.; Wanielik, G. Probabilistic data association for tracking extended group targets under clutter using random matrices. In Proceedings of the International Conference on Information Fusion, Washington, DC, USA, 6–9 July 2015; pp. 961–968. [Google Scholar]
- Lan, J.; Li, X.R. Tracking of extended object or target group using random matrix—Part II: Irregular object. In Proceedings of the International Conference on Information Fusion, Singapore, 9–12 July 2012; pp. 2185–2192. [Google Scholar]
- Lan, J.; Li, X.R. Tracking of Maneuvering Non-Ellipsoidal Extended Object or Target Group Using Random Matrix. IEEE Trans. Signal Process. 2014, 62, 2450–2463. [Google Scholar] [CrossRef]
- Granström, K.; Willett, P.; Bar-Shalom, Y. An extended target tracking model with multiple random matrices and unified kinematics. In Proceedings of the International Conference on Information Fusion, Washington, DC, USA, 6–9 July 2015. [Google Scholar]
- Granström, K.; Lundquist, C.; Orguner, U. Tracking rectangular and elliptical extended targets using laser measurements. In Proceedings of the International Conference on Information Fusion, Chicago, IL, USA, 5–8 July 2011. [Google Scholar]
- Granström, K.; Reuter, S.; Meissner, D.; Scheel, A. A multiple model PHD approach to tracking of cars under an assumed rectangular shape. In Proceedings of the International Conference on Information Fusion, Salamanca, Spain, 7–10 July 2014. [Google Scholar]
- Granström, K.; Lundquist, C. On the Use of Multiple Measurement Models for Extended Target Tracking. In Proceedings of the International Conference on Information Fusion, Istanbul, Turkey, 9–12 July 2013. [Google Scholar]
- Baum, M.; Hanebeck, U. Random hypersurface models for extended object tracking. In Proceedings of the IEEE International Symposium on Signal Processing and Information Technology, Ajman, UAE, 14–17 December 2010. [Google Scholar]
- Baum, M.; Hanebeck, U. Shape tracking of extended objects and group targets with starconvex RHMs. In Proceedings of the International Conference on Information Fusion, Chicago, IL, USA, 5–8 July 2011. [Google Scholar]
- Steinbring, J.; Baum, M.; Zea, A.; Faion, F.; Hanebeck, U. A Closed-Form Likelihood for Particle Filters to Track Extended Objects with Star-Convex RHMs. In Proceedings of the IEEE International Conference on Multisensor Fusion and Information Integration, San Diego, CA, USA, 14–16 September 2015. [Google Scholar]
- Özkan, E.; Wahlström, N.; Godsill, S. Rao-blackwellised particle filter for star-convex extended target tracking models. In Proceedings of the International Conference on Information Fusion, Heidelberg, Germany, 5–8 July 2016. [Google Scholar]
- Wahlström, N.; Özkan, E. Extended target tracking using Gaussian processes. IEEE Trans. Signal Process. 2015, 63, 4165–4178. [Google Scholar] [CrossRef]
- Hirscher, T.; Scheel, A.; Reuter, S.; Dietmayer, K. Multiple extended object tracking using Gaussian processes. In Proceedings of the International Conference on Information Fusion, Heidelberg, Germany, 5–8 July 2016. [Google Scholar]
- Granström, K.; Baum, M.; Reuter, S. Extended Object Tracking: Introduction, Overview and Applications. arXiv, 2016; arXiv:1604.00970. [Google Scholar]
- Mahler, J.; Patil, S.; Kehoe, B.; Van Den Berg, J.; Ciocarlie, M.; Abbeel, P.; Goldberg, K. Gp-gpis-opt: Grasp planning with shape uncertainty using Gaussian process implicit surfaces and sequential convex programming. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 4919–4926. [Google Scholar]
- Martens, W.; Poffet, Y.; Soria, P.R.; Fitch, R.; Sukkarieh, S. Geometric priors for Gaussian process implicit surfaces. IEEE Robot. Autom. Lett. 2017, 2, 373–380. [Google Scholar] [CrossRef]
- Kumru, M.; Özkan, E. 3D Extended Object Tracking Using Recursive Gaussian Processes. In Proceedings of the 21st International Conference on Information Fusion, Cambridge, UK, 10–13 July 2018; pp. 1–8. [Google Scholar]
- Huber, M.F. Recursive Gaussian process regression. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; pp. 3362–3366. [Google Scholar]
- Chen, X.; Wang, X.; Xuan, J. Tracking Multiple Moving Objects Using Unscented Kalman Filtering Techniques. arXiv, 2018; arXiv:1802.01235. [Google Scholar]
- Chen, X.; Wang, W.; Meng, W.; Zhang, Z. A novel UKF based scheme for GPS signal tracking in high dynamic environment. In Proceedings of the International Symposium on Systems and Control in Aeronautics and Astronautics, Harbin, China, 8–10 June 2010. [Google Scholar]










© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, H.; An, W.; Zhu, R. Extended Target Tracking and Feature Estimation for Optical Sensors Based on the Gaussian Process. Sensors 2019, 19, 1704. https://doi.org/10.3390/s19071704
Yu H, An W, Zhu R. Extended Target Tracking and Feature Estimation for Optical Sensors Based on the Gaussian Process. Sensors. 2019; 19(7):1704. https://doi.org/10.3390/s19071704
Chicago/Turabian StyleYu, Haoyang, Wei An, and Ran Zhu. 2019. "Extended Target Tracking and Feature Estimation for Optical Sensors Based on the Gaussian Process" Sensors 19, no. 7: 1704. https://doi.org/10.3390/s19071704
APA StyleYu, H., An, W., & Zhu, R. (2019). Extended Target Tracking and Feature Estimation for Optical Sensors Based on the Gaussian Process. Sensors, 19(7), 1704. https://doi.org/10.3390/s19071704