Precise Point Positioning Using Dual-Frequency GNSS Observations on Smartphone

Abstract
:1. Introduction
2. Methods
2.1. GPS/Galileo PPP Algorithm
2.2. Data Processing Strategies
3. Experiments and Results
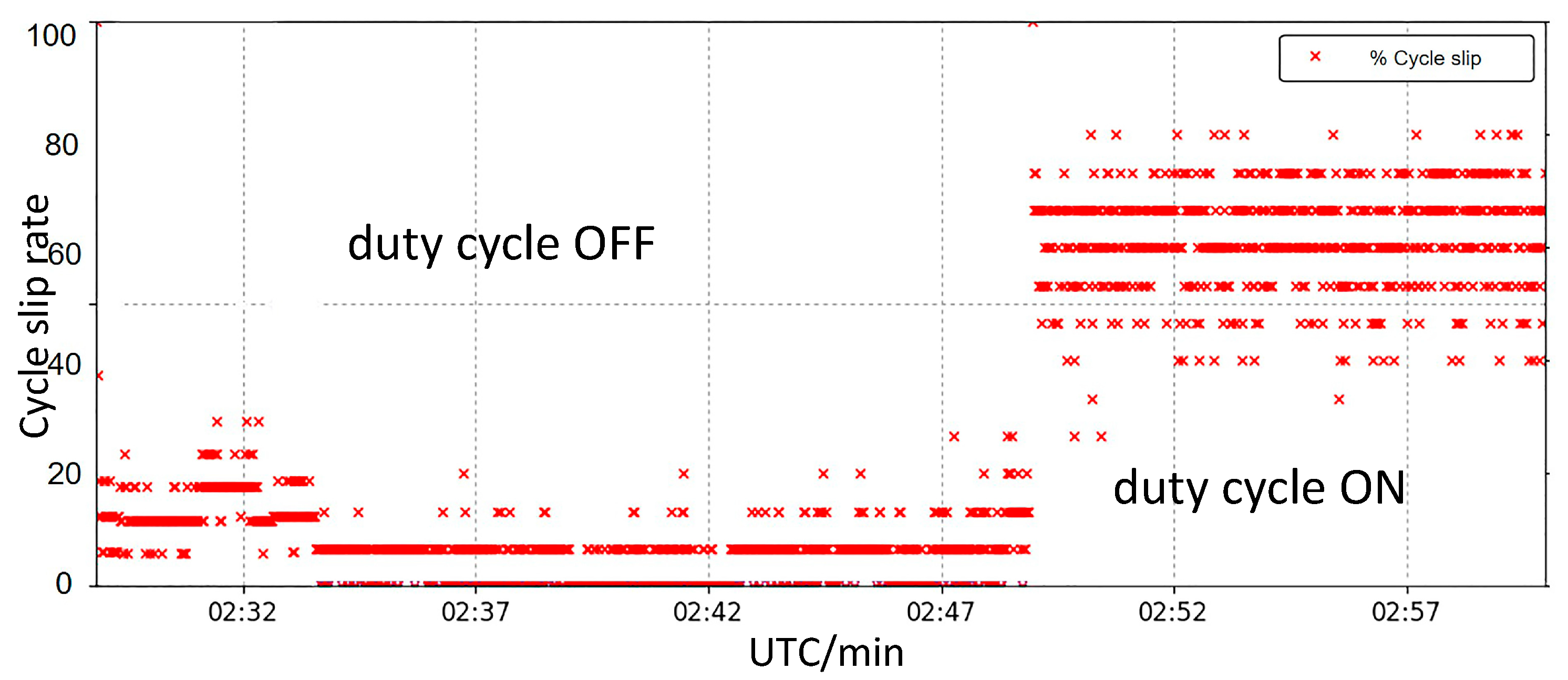
3.1. Duty Cycle
3.2. Static Data Collection
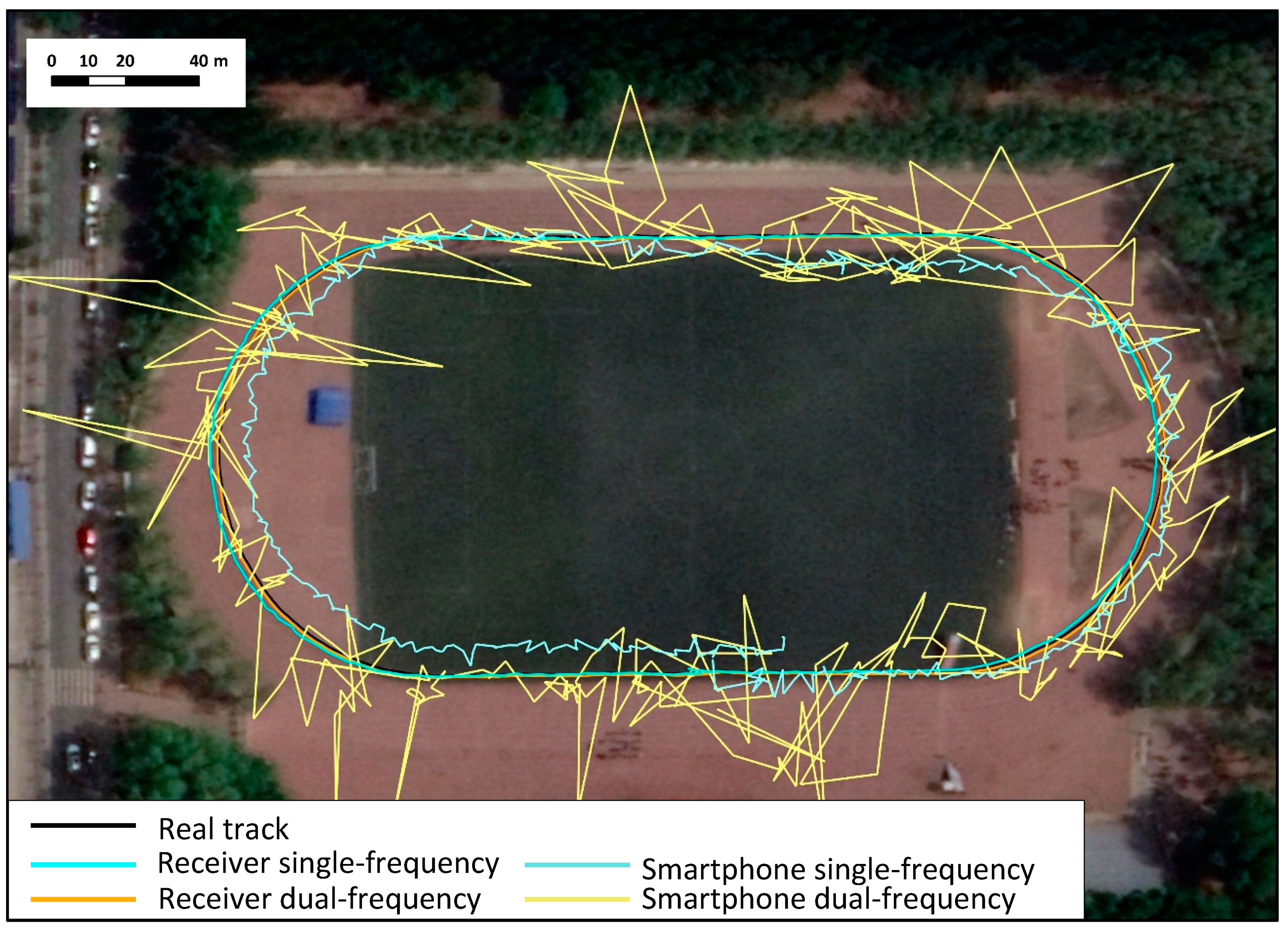
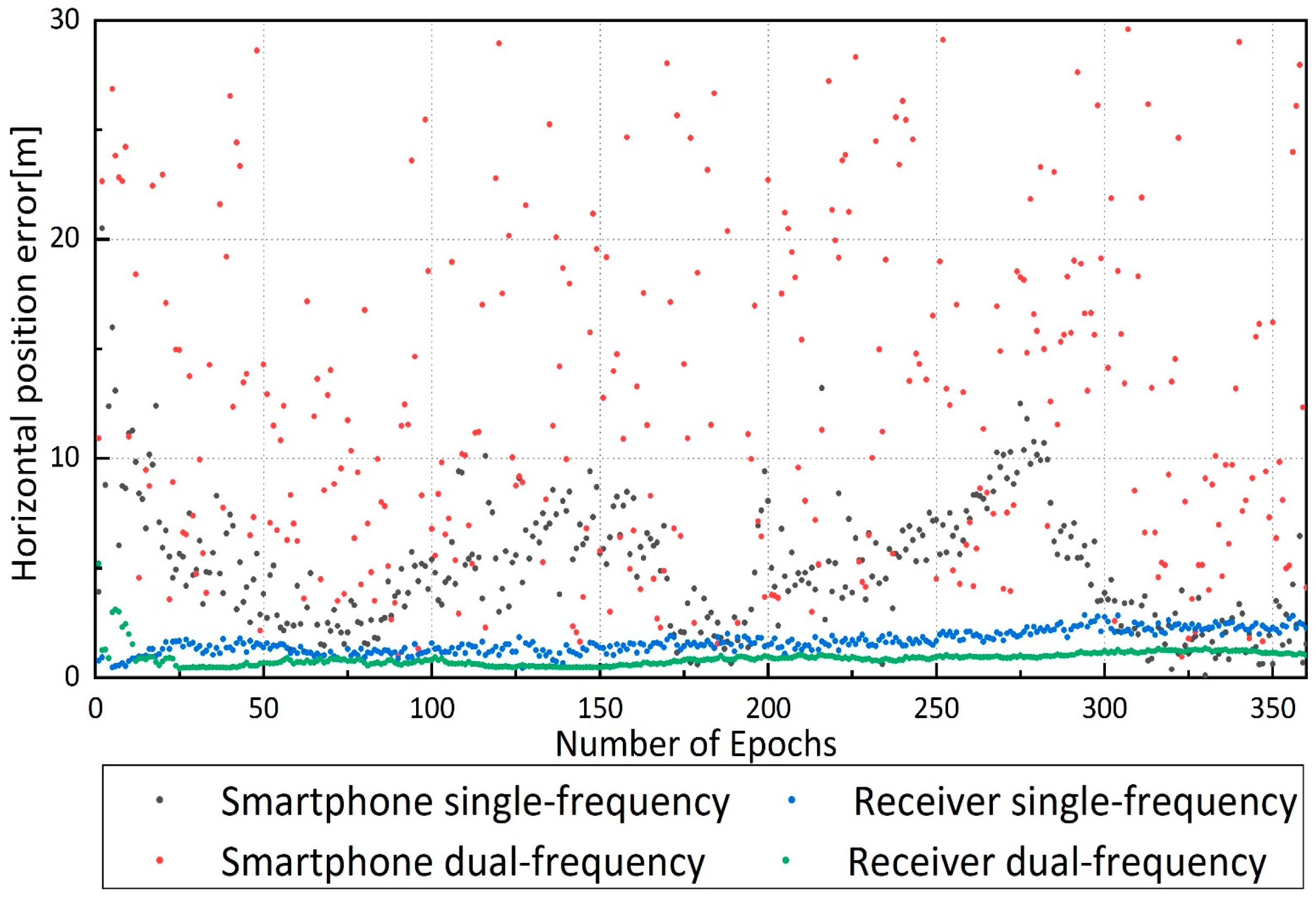
3.3. Kinematic Data Analysis
4. Conclusions and Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. Biogeosci. 1997, 102, 5005–5017. [Google Scholar] [Green Version]
- Kouba, J.; Héroux, P. Precise Point Positioning Using IGS Orbit and Clock Products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Rudolph, S.; Marchant, B.P.; Weihermüller, L.; Vereecken, H. Assessment of the position accuracy of a single-frequency GPS receiver designed for electromagnetic induction surveys. Precis. Agric. 2019, 20, 19–39. [Google Scholar] [CrossRef]
- Seyyedhasani, H.; Dvorak, J.S.; Sama, M.P.; Stombaugh, T.S. Mobile Device-Based Location Services Accuracy. Appl. Eng. Agric. 2016, 32, 539–547. [Google Scholar]
- Tomaštík, J., Jr.; Tomaštík, J., Sr.; Saloň, Š.; Piroh, R. Horizontal accuracy and applicability of smartphone GNSS positioning in forests. Forestry 2016, 90, 187–198. [Google Scholar] [CrossRef]
- Takasu, T.; Yasuda, A. Development of the low-cost RTK-GPS receiver with an open source program package RTKLIB. In Proceedings of the International symposium on GPS/GNSS, Jeju, Korea, 4–6 November 2009; pp. 4–6. [Google Scholar]
- Takasu, T. RTKLIB ver. 2.4.2 Manual. Available online: http://www.rtklib.com/prog/manual_2.4.2.pdf (accessed on 1 April 2019).
- Luis Elneser, S.C.; Ken, H.; James, M. Real-Time GPS PPP-RTK Experiments for Mining Applications using Quasi-Zenith Satellite System (QZSS) Augmentation Signal. In Proceedings of the 30th International Technical Meeting of The Satellite Division of The Institute of Navigation (ION GNSS+ 2017), Portland, OR, USA, 25–29 September 2017; pp. 2235–2243. [Google Scholar] [CrossRef]
- Krasuski, K.; Ćwiklak, J. Application of the dgps method for the precise positioning of an aircraft in air transport. Sci. J. Sil. Univ. Technol. Ser. 2018, 98, 65–79. [Google Scholar] [CrossRef]
- Ziebold, R.; Medina, D.; Romanovas, M.; Lass, C.; Gewies, S. Performance Characterization of GNSS/IMU/DVL Integration under Real Maritime Jamming Conditions. Sensors 2018, 18, 2954. [Google Scholar] [CrossRef] [PubMed]
- Andrei, C.-O.; Lahtinen, S.; Nordman, M.; Näränen, J.; Koivula, H.; Poutanen, M.; Hyyppä, J. GPS Time Series Analysis from Aboa the Finnish Antarctic Research Station. Remote. Sens. 2018, 10, 1937. [Google Scholar] [CrossRef]
- Herring, T.A. Modeling atmospheric delays in the analysis of space geodetic data. In Proceedings of the Refraction of Transatmospheric Signals in Geodesy, Hague, The Netherlands, 19–22 May 1992; 1992; Volume 36, pp. 157–164. [Google Scholar]
- Zhou, F.; Dong, D.; Li, W.; Jiang, X.; Wickert, J.; Schuh, H. GAMP: An open-source software of multi-GNSS precise point positioning using undifferenced and uncombined observations. Gps Solut. 2018, 22, 33. [Google Scholar] [CrossRef]
- Liu, Q.; Ying, R.; Wang, Y.; Qian, J.; Liu, P. Pseudorange Double Difference Algorithm Based on Duty-Cycled Carrier Phase Smoothing on Low-Power Smart Devices. In Proceedings of the China Satellite Navigation Conference (CSNC) 2018 Proceedings, Harbin, China, 23–25 May 2018; pp. 415–430. [Google Scholar] [CrossRef]
- Realini, E.; Caldera, S.; Pertusini, L.; Sampietro, D. Precise GNSS Positioning Using Smart Devices. Sensors 2017, 17, 2434. [Google Scholar] [CrossRef] [PubMed]
- Gill, M.; Bisnath, S.; Aggrey, J.; Seepersad, G. Precise point positioning (PPP) using low-cost and ultra-low-cost GNSS receivers. In Proceedings of the 30th International Technical Meeting of The Satellite Division of The Institute of Navigation (ION GNSS+ 2017), Portland, OR, USA, 25–29 September 2017; pp. 226–236. [Google Scholar] [CrossRef]
- Zhang, X.; Tao, X.; Zhu, F.; Shi, X.; Wang, F. Quality assessment of GNSS observations from an Android N smartphone and positioning performance analysis using time-differenced filtering approach. Gps Solut. 2018, 22, 70. [Google Scholar] [CrossRef]
- Broadcom, Broadcom BCM17755 GNSS Chip. Available online: https://www.broadcom.com/products/wireless/gnss-gps-socs/bcm47755 (accessed on 1 April 2019).
- Xu, G.; Xu, Y. GPS: Theory, Algorithms and Applications, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar] [CrossRef]
- Sanz Subirana, J.; Juan Zornoza, J.M.; Hernández-Pajares, M. GNSS Data processing. Volume 1: Fundamentals and Algorithms; ESA Communications: Noordwijk, The Netherlands, 2013; Volume 1, p. 2200. [Google Scholar]
- Håkansson, M.; Jensen, A.B.O.; Horemuz, M.; Hedling, G. Review of code and phase biases in multi-GNSS positioning. GPS Solut. 2017, 21, 849–860. [Google Scholar] [CrossRef]
- El-Mowafy, A.; Deo, M.; Rizos, C. On biases in precise point positioning with multi-constellation and multi-frequency GNSS data. Meas. Sci. Technol. 2016, 27, 035102. [Google Scholar] [CrossRef]
- Montenbruck, O.; Hauschild, A.; Steigenberger, P. Differential Code Bias Estimation using Multi-GNSS Observations and Global Ionosphere Maps. J. Inst. Navig. 2014, 61, 191–201. [Google Scholar] [CrossRef] [Green Version]
- Guo, J.; Xu, X.; Zhao, Q.; Liu, J. Precise orbit determination for quad-constellation satellites at Wuhan University: strategy, result validation, and comparison. J. Geod. 2016, 90, 143–159. [Google Scholar] [CrossRef]
- Wang, N.; Yuan, Y.; Li, Z.; Montenbruck, O.; Tan, B. Determination of differential code biases with multi-GNSS observations. J. Geod. 2016, 90, 209–228. [Google Scholar] [CrossRef]
- Petit, G.; Luzum, B. IERS Conventions (2010); Bundesamt für Kartographie und Geodäsie: Frankfurt am Main, Germany, 2010.
- Riley, S.; Lentz, W.; Clare, A. On the path to precision—Observations with android GNSS observables. In Proceedings of the 30th International Technical Meeting of The Satellite Division of The Institute of Navigation (ION GNSS+ 2017), Portland, OR, USA, 25–29 September 2017; pp. 116–129. [Google Scholar]
- Google Andriod 9.0 Pie. Available online: https://developer.android.com/about/versions/pie/android-9.0 (accessed on 1 April 2019).
- Geo++ RINEX Logger App. Available online: https://play.google.com/store/apps/details?id=de.geopp.rinexlogger (accessed on 1 April 2019).
- Li, P.; Zhang, X. Integrating GPS and GLONASS to accelerate convergence and initialization times of precise point positioning. GPS Solut. 2014, 18, 461–471. [Google Scholar] [CrossRef]
- Hatch, R. Satellite Navigation Accuracy: Past, Present and Future. In Proceedings of the 8th GNSS Workshop, Jeju Island, Korea, 7–9 November 2001; pp. 7–9. [Google Scholar]
- Asari, K.; Saito, M.; Amitani, H. SSR Assist for Smartphones with PPP-RTK Processing. In Proceedings of the 30th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2017), Institute of Navigation, Portland, OR, USA, 25–29 September 2017; pp. 130–138. [Google Scholar] [CrossRef]
- Lachapelle, G.; Gratton, P.; Horrelt, J.; Lemieux, E.; Broumandan, A. Evaluation of a Low Cost Hand Held Unit with GNSS Raw Data Capability and Comparison with an Android Smartphone. Sensors 2018, 18, 4185. [Google Scholar] [CrossRef] [PubMed]
- Brovelli, M.A.; Minghini, M.; Zamboni, G. Public participation in GIS via mobile applications. ISPRS J. Photogramm. Sens. 2016, 114, 306–315. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Strategies |
|---|---|
| Observations | Dual-frequency: GPS L1/L5, Galileo E1/E5a ionosphere-free combination of code and carrier phase Single-frequency: GPS L1, GLONASS L1, Galileo E1 code and carrier phase |
| Sampling rate | 1 s |
| Elevation cutoff | 10° |
| Observation weight | Elevation dependent weight |
| Orbits | WUM final orbits |
| Satellite clocks | WUM final clocks, 30 s interval |
| Tidal loadings | IERS conventions (2010) and FES2004 model [26] |
| Ionospheric delay | Dual-frequency: ionosphere-free combination mode Single-frequency: ionospheric broadcast model |
| Satellite antenna phase center correction | IGS14.atx |
| Receiver antenna phase center correction | IGS14.atx |
| Antenna phase wind-up correction | IGS model |
| DCB | CAS DCB file |
| Parameter estimation | Extended Kalman Filter (EKF) |
| Receiver coordinates | Estimate |
| Receiver clock | Estimate |
| Inter-system bias | Estimate |
| Ambiguities | Estimate, float |
| Tropospheric delay | Estimate ZTD and horizontal gradients |
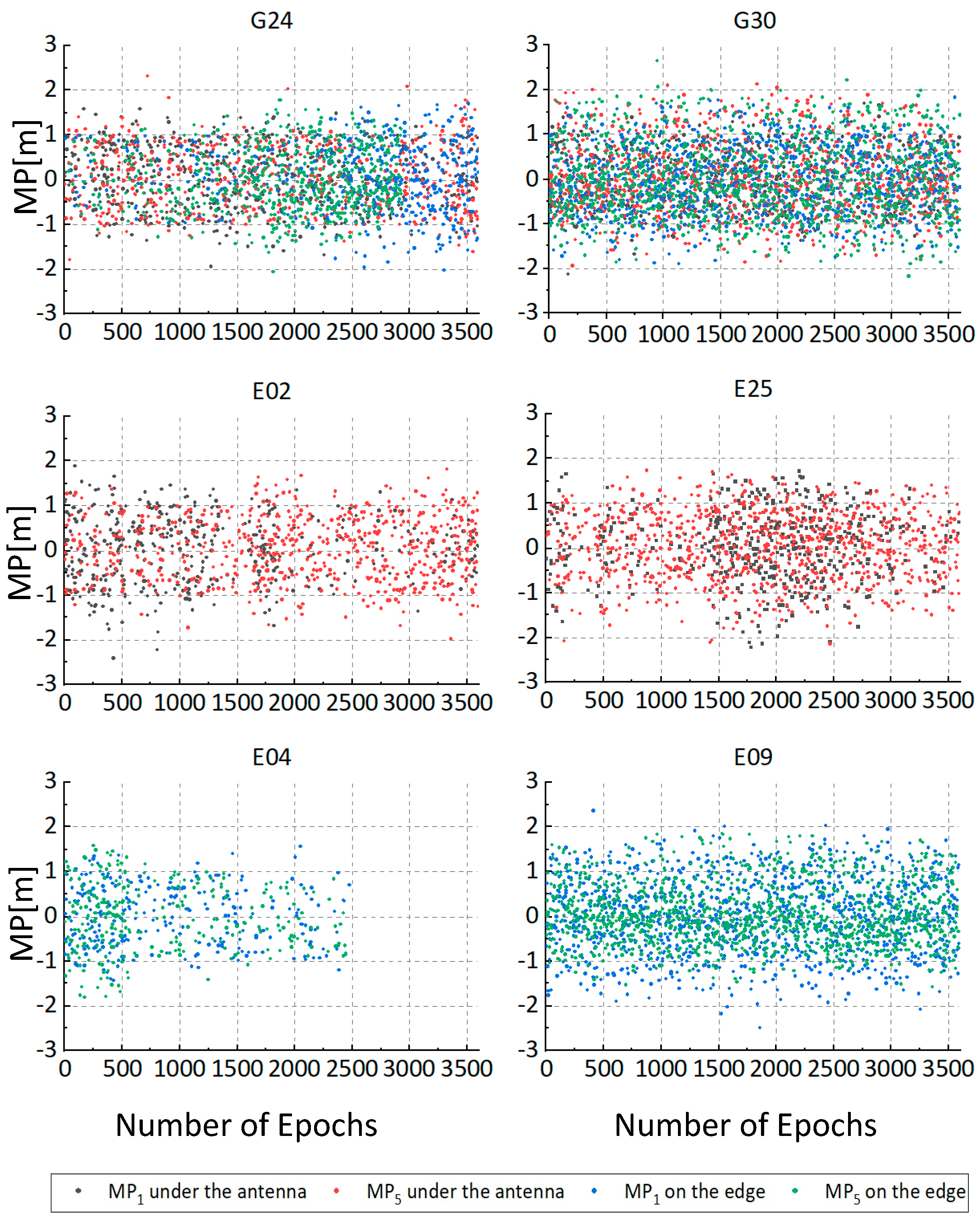
| Satellite | STD of MP1 under the Antenna | STD of MP5 under the Antenna | STD of MP1 on the Edge | STD of MP5 on the Edge |
|---|---|---|---|---|
| G24 | 0.68 | 0.70 | 0.78 | 0.71 |
| G30 | 0.64 | 0.74 | 0.75 | 0.83 |
| E02 | 0.71 | 0.72 | N/A | N/A |
| E25 | 0.78 | 0.74 | N/A | N/A |
| E04 | N/A | N/A | 0.67 | 0.76 |
| E09 | N/A | N/A | 0.82 | 0.67 |
| Data Sets | Positioning Accuracy (m) | |||
|---|---|---|---|---|
| 1 | 0.5 | 0.2 | 0.1 | |
| smartphone single-frequency(min) | N/A | N/A | N/A | N/A |
| smartphone dual-frequency(min) | 102 | 107 | 116 | N/A |
| receiver single-frequency(min) | 35 | 158 | N/A | N/A |
| receiver dual-frequency(min) | 66 | 107 | 272 | 301 |
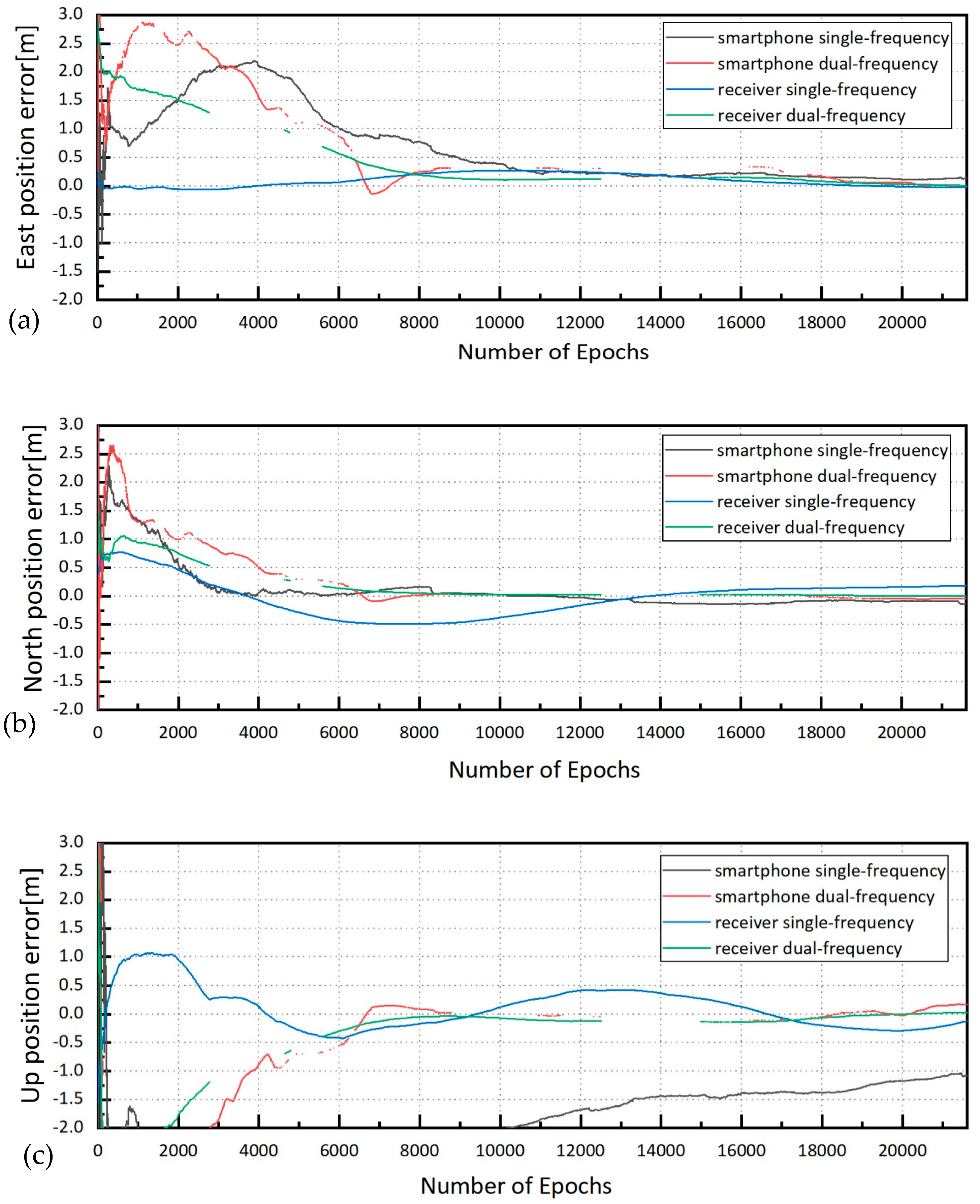
| Data Sets | East (cm) | North (cm) | Up (cm) |
|---|---|---|---|
| smartphone single-frequency | N/A | N/A | N/A |
| smartphone dual-frequency | 21.8 | 4.1 | 11.0 |
| receiver single-frequency | 14.6 | 25.8 | 27.1 |
| receiver dual-frequency | 0.2 | 0.1 | 0.5 |
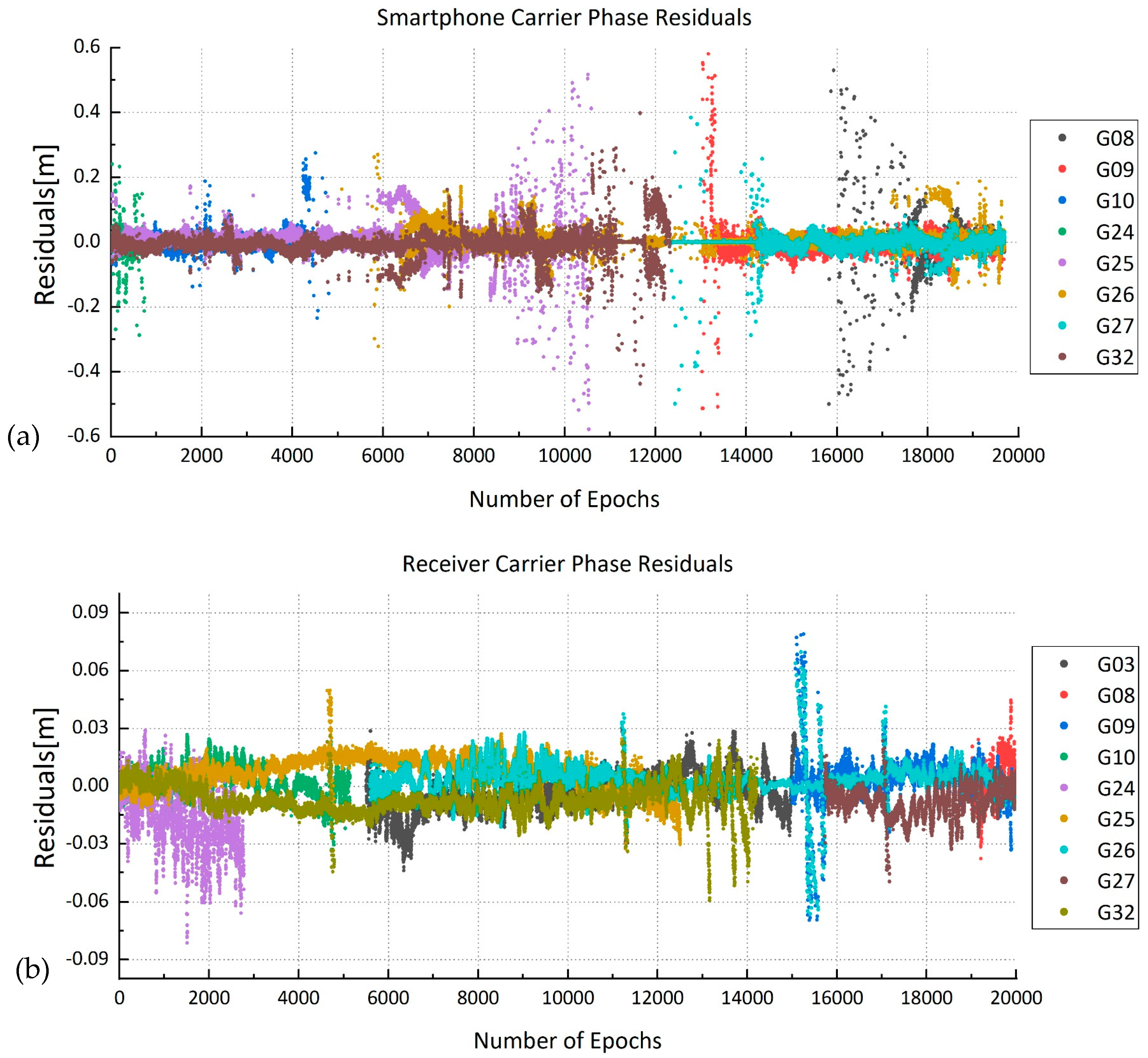
| Satellite | STD of Smartphone Carrier Phase Residual | STD of Receiver Carrier Phase Residual |
|---|---|---|
| G03 | N/A | 0.009 |
| G08 | 0.073 | 0.010 |
| G09 | 0.045 | 0.010 |
| G10 | 0.032 | 0.008 |
| G24 | 0.056 | 0.016 |
| G25 | 0.051 | 0.008 |
| G26 | 0.030 | 0.007 |
| G27 | 0.032 | 0.007 |
| G32 | 0.039 | 0.007 |
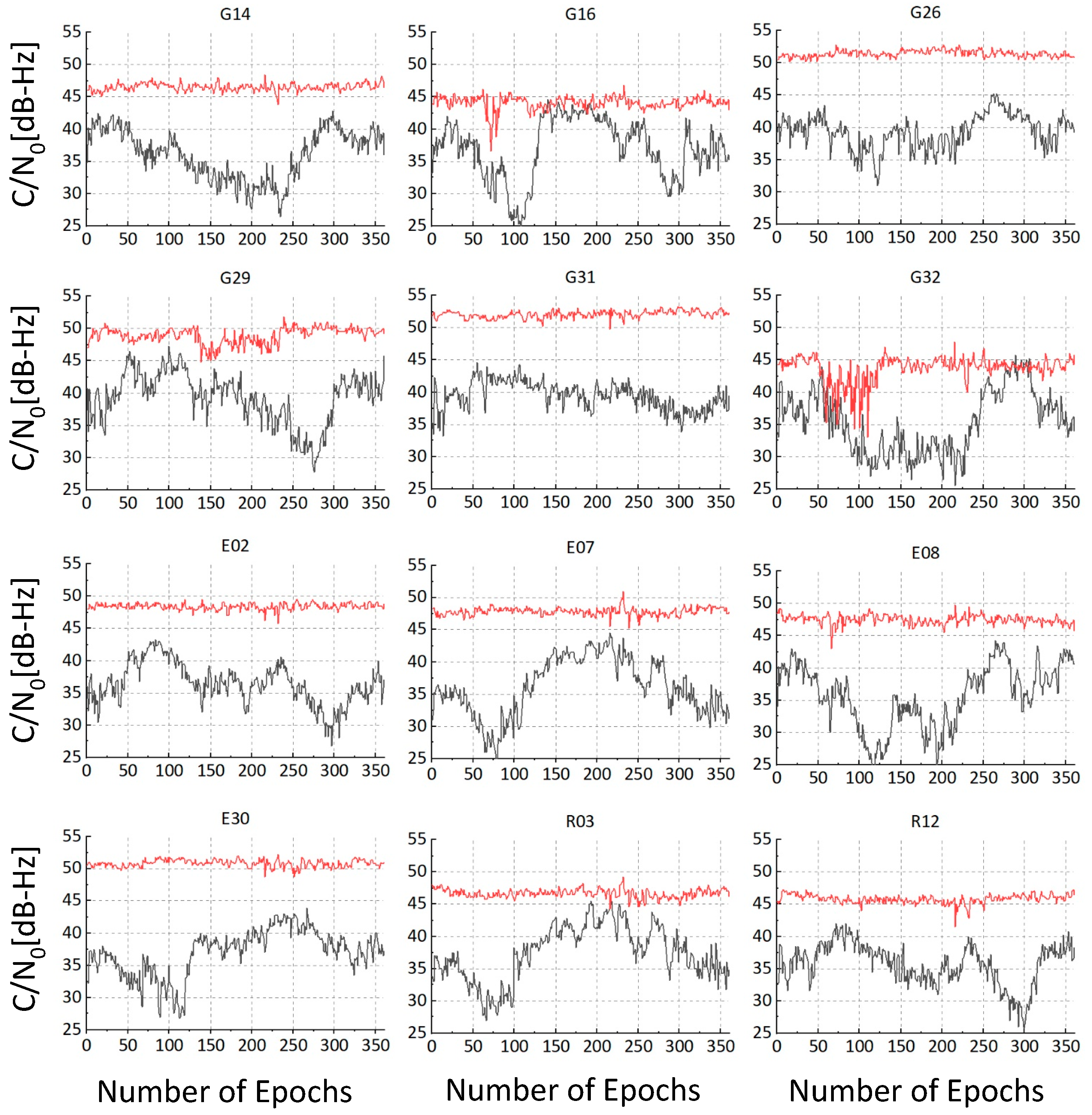
| Satellite | The Mean of Smartphone C/N0 | The STD of Smartphone C/N0 | The Mean of Receiver C/N0 | The STD of Receiver C/N0 |
|---|---|---|---|---|
| G14 | 36.07 | 3.77 | 46.53 | 0.59 |
| G16 | 37.02 | 4.69 | 44.05 | 1.04 |
| G26 | 39.29 | 2.62 | 51.41 | 0.52 |
| G29 | 39.32 | 4.00 | 48.94 | 1.21 |
| G31 | 39.46 | 2.14 | 52.06 | 0.56 |
| G32 | 35.32 | 4.74 | 43.69 | 1.99 |
| E02 | 36.41 | 3.17 | 48.39 | 0.49 |
| E07 | 36.09 | 4.45 | 47.87 | 0.62 |
| E08 | 35.63 | 4.80 | 47.46 | 0.75 |
| E30 | 36.93 | 3.59 | 50.82 | 0.55 |
| R03 | 37.38 | 4.24 | 46.67 | 0.68 |
| R12 | 35.72 | 3.21 | 45.81 | 0.69 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Q.; Sun, M.; Zhou, C.; Zhang, P. Precise Point Positioning Using Dual-Frequency GNSS Observations on Smartphone. Sensors 2019, 19, 2189. https://doi.org/10.3390/s19092189
Wu Q, Sun M, Zhou C, Zhang P. Precise Point Positioning Using Dual-Frequency GNSS Observations on Smartphone. Sensors. 2019; 19(9):2189. https://doi.org/10.3390/s19092189
Chicago/Turabian StyleWu, Qiong, Mengfei Sun, Changjie Zhou, and Peng Zhang. 2019. "Precise Point Positioning Using Dual-Frequency GNSS Observations on Smartphone" Sensors 19, no. 9: 2189. https://doi.org/10.3390/s19092189
APA StyleWu, Q., Sun, M., Zhou, C., & Zhang, P. (2019). Precise Point Positioning Using Dual-Frequency GNSS Observations on Smartphone. Sensors, 19(9), 2189. https://doi.org/10.3390/s19092189