ANTspin: Efficient Absolute Localization Method of RFID Tags via Spinning Antenna


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Research
3. RFID Signal Characteristic
4. Initial Attempts
4.1. Fingerprint Library based Regional Localization
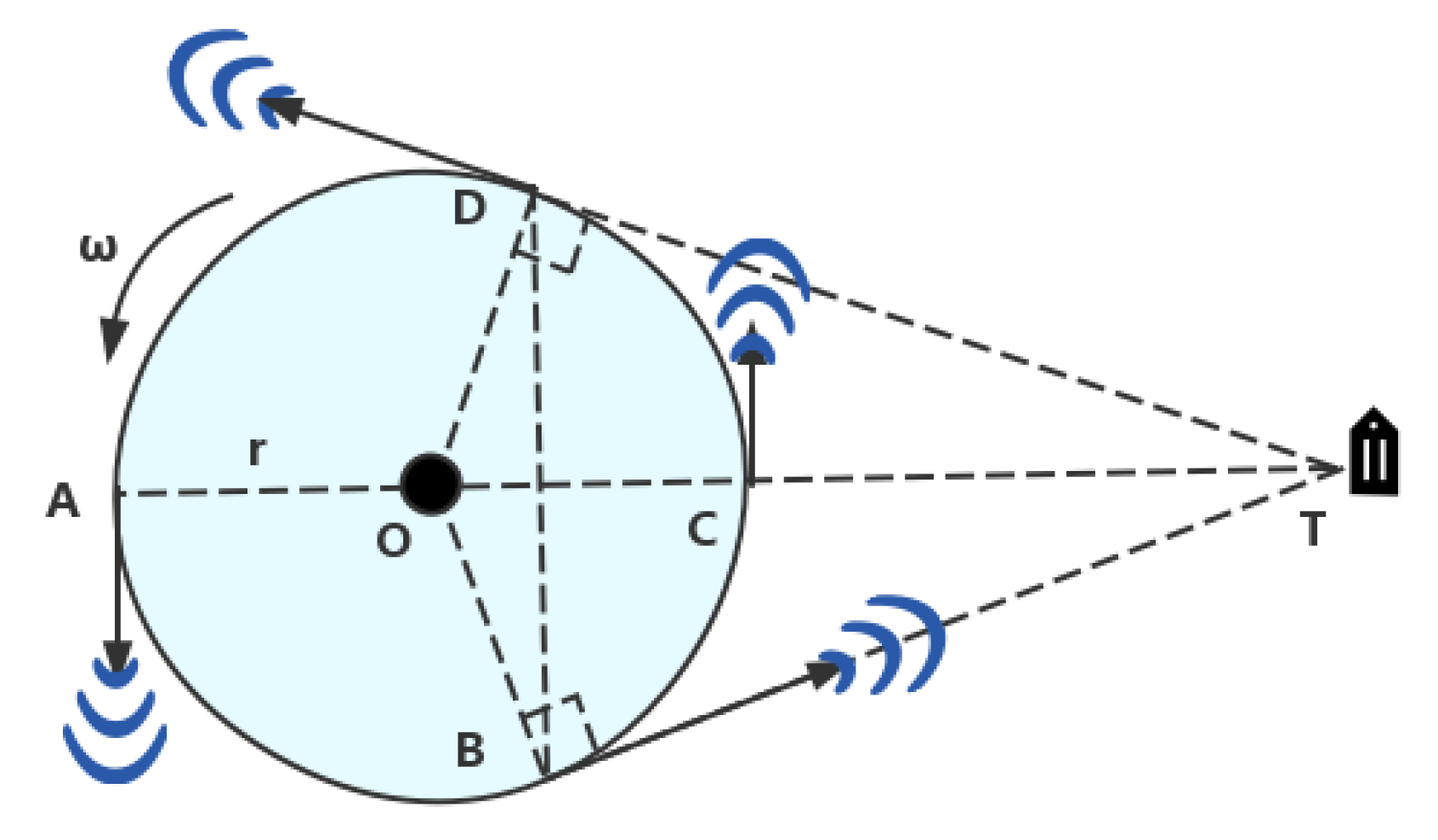
4.2. Doppler Frequency Based Rotational Localization
5. Materials and Methods
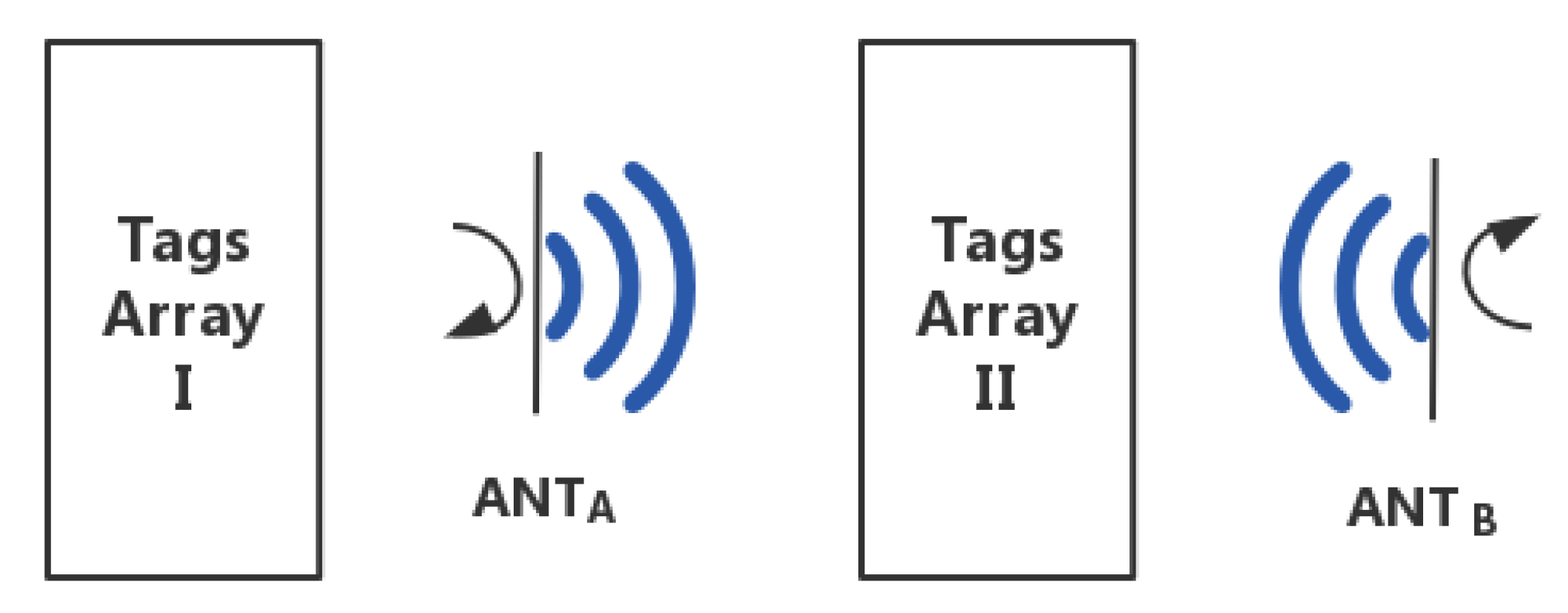
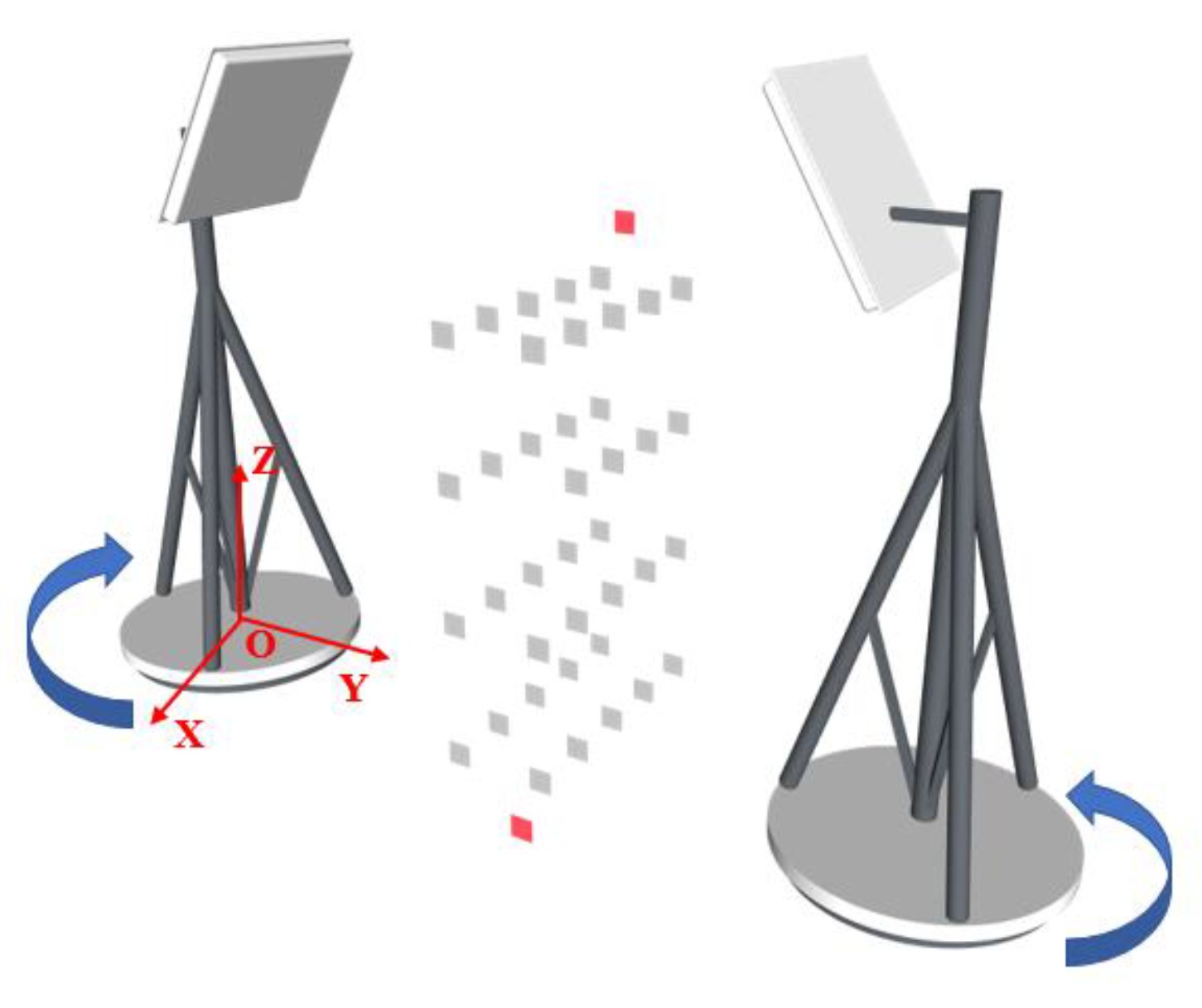
5.1. Data Collection
5.2. Data Processing
5.3. Relative Incident Angle Calculation
5.4. Distance Calculation
5.5. 2D Localization
5.6. 3D Localization
- The first type is based on the AOA algorithm. Two angular directions intersect to get the coordinate on the XOY plane, and the distance between the antenna and tags determines the Z-axis coordinate.
- Calculate the distance between the tag and the two antennas at first. Take the antenna as the center and distance as the radius of the sphere. The intersecting loop of the two spheres determines the Y-axis coordinate. After that, the problem is converted into two-dimensional localization.
- Third, the Y-axis coordinates are determined by using the distance data of the two antennas, and the coordinates on the XOZ plane is determined by the intersection of the two relative incident angles and the loop.
6. Results and Evaluation
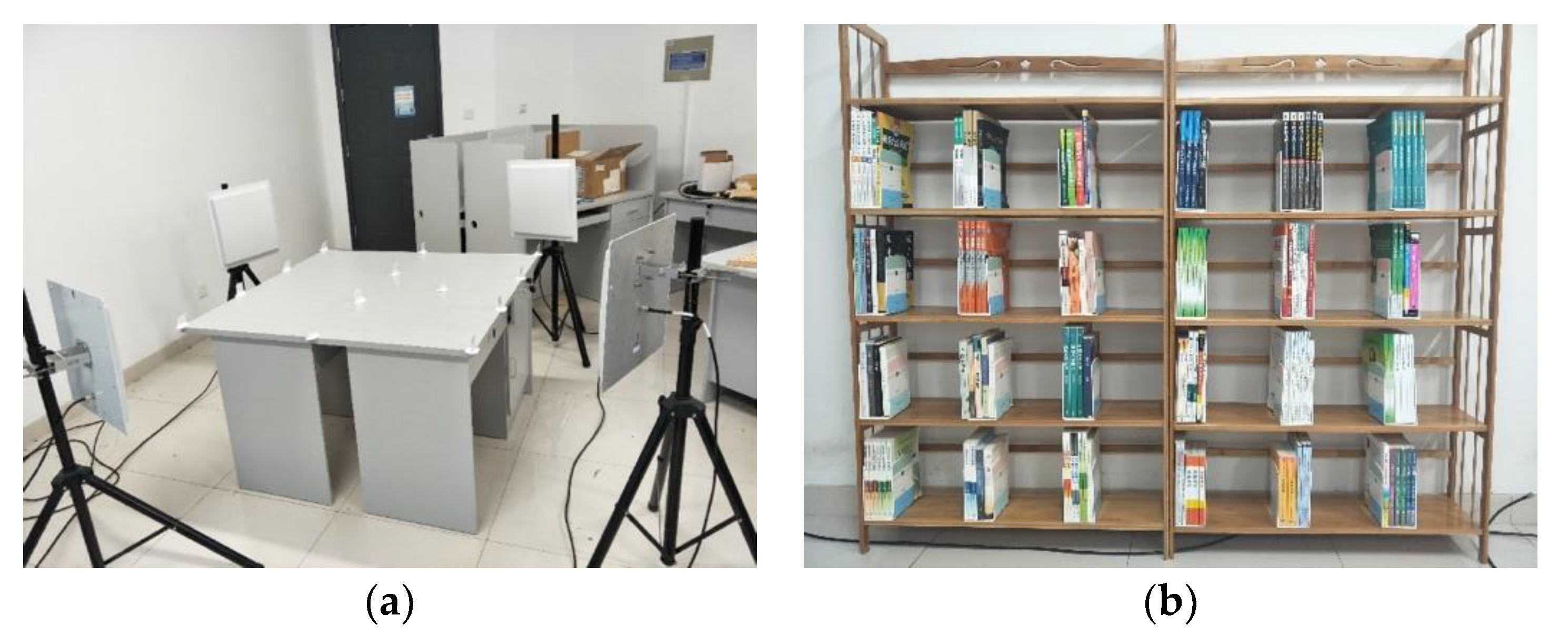
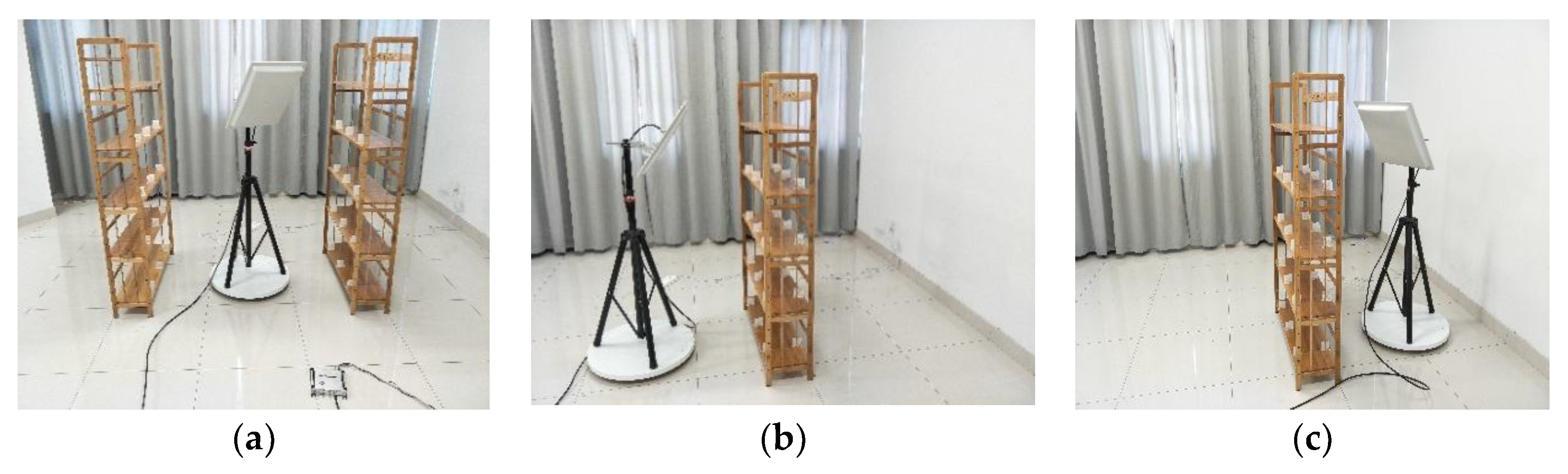
6.1. Hardware Equipment and Deployment
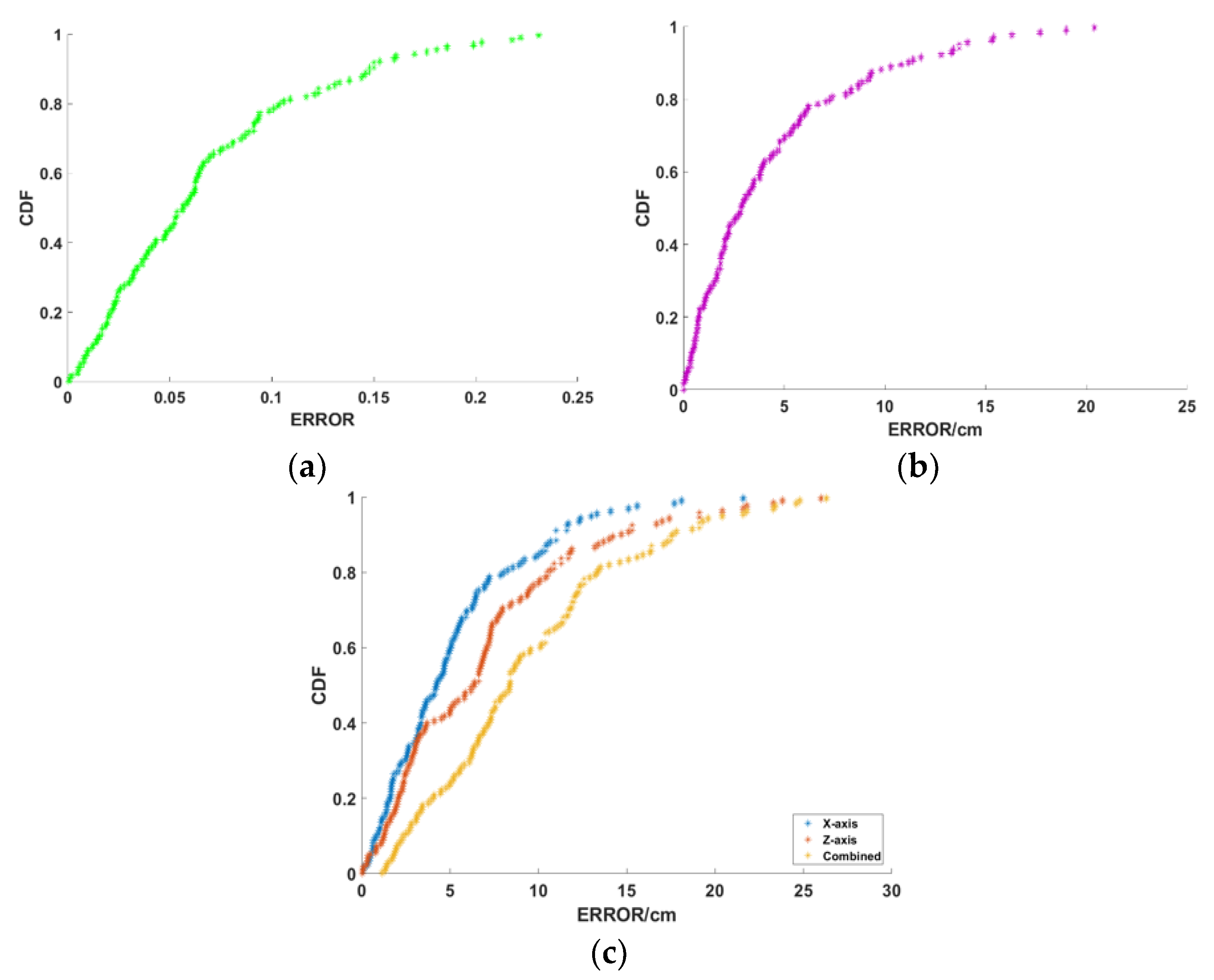
6.2. 2D Plane Localization Accuracy
6.3. 3D Space Localization Accuracy
6.4. Parameter Analysis
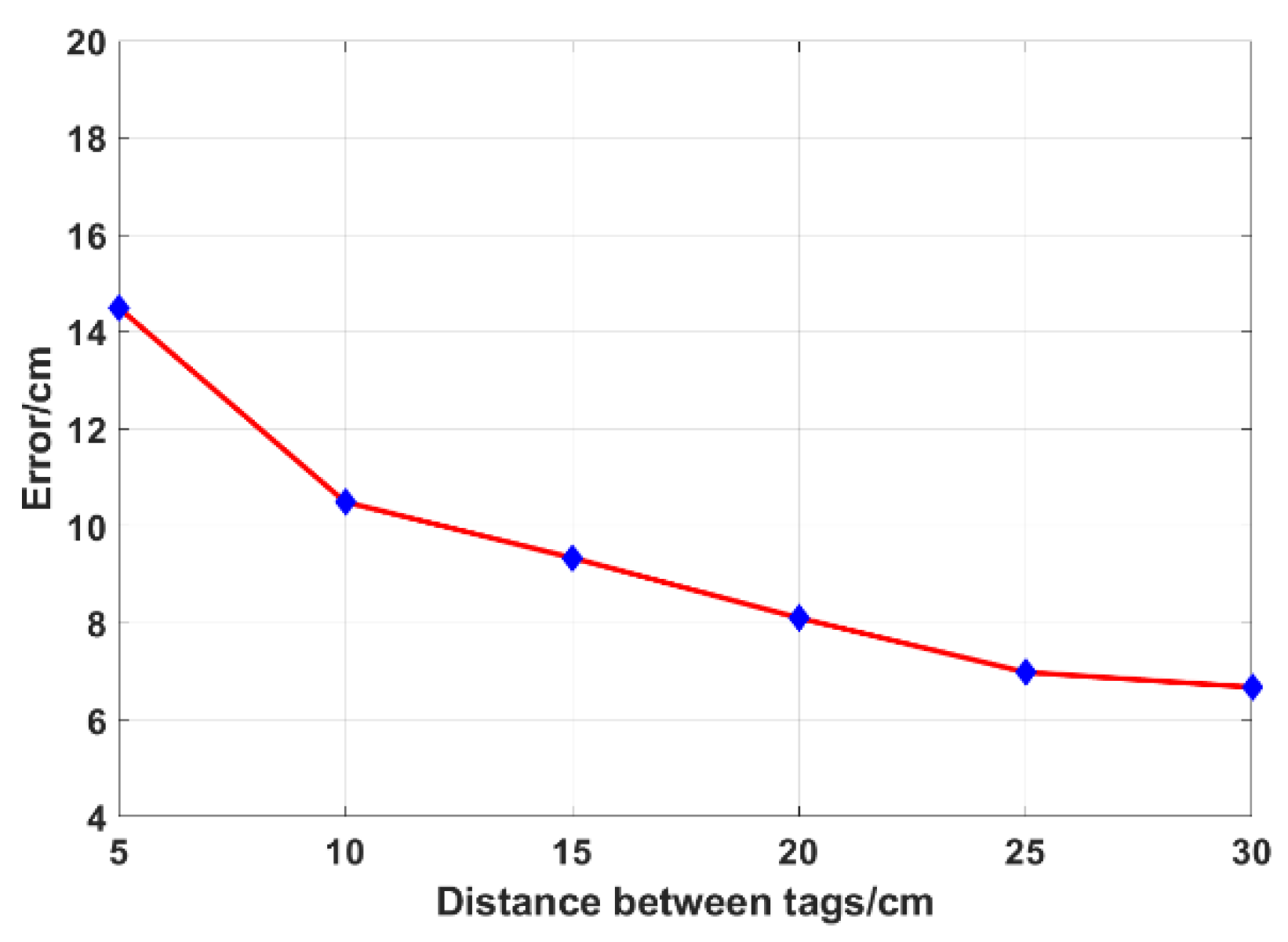
6.4.1. Tag Density
6.4.2. Distance between Antenna and Tag Array
6.4.3. Incidence Angle of the Signal
6.4.4. Reference Tags
6.4.5. Antenna Rotation Speed
6.4.6. Antenna Height and Tilt Angle
6.5. Some Discussions about ANTspin
6.6. Application
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jaiswal, R.K.; Jaidhar, C.D. A Performance Evaluation of Location Prediction Position-Based Routing Using Real GPS Traces for VANET. Wirel. Pers. Commun. 2018, 102, 275–292. [Google Scholar] [CrossRef]
- Correa, A.; Barcelo, M.; Morell, A.; Vicario, J. A Review of Pedestrian Indoor Positioning Systems for Mass Market Applications. Sensors 2017, 17, 1927. [Google Scholar] [CrossRef] [PubMed]
- Papapostolou, A.; Chaouchi, H. Integrating RFID and WLAN for indoor positioning and IP movement detection. Wirel. Netw. 2012, 18, 861–879. [Google Scholar] [CrossRef]
- Atia, M.M.; Noureldin, A.; Korenberg, M.J. Dynamic Online-Calibrated Radio Maps for Indoor Positioning in Wireless Local Area Networks. IEEE Trans. Mob. Comput. 2013, 12, 1774–1787. [Google Scholar] [CrossRef]
- Khyam, M.O.; Noor-A-Rahim, Md.; Li, X.; Ritz, C.; Guan, Y.L.; Ge, S.S. Design of Chirp Waveforms for Multiple-Access Ultrasonic Indoor Positioning. IEEE Sens. J. 2018, 18, 6375–6390. [Google Scholar] [CrossRef]
- Yohan, A.; Lo, N.-W.; Winata, D. An Indoor Positioning-Based Mobile Payment System Using Bluetooth Low Energy Technology. Sensors 2018, 18, 974. [Google Scholar] [CrossRef]
- Ma, R.; Guo, Q.; Hu, C.; Xue, J. An Improved WiFi Indoor Positioning Algorithm by Weighted Fusion. Sensors 2015, 15, 21824–21843. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, X.; Xiao, B.; Li, K.; Liu, A.X.; Wu, J.; Xie, X.; Qi, H. RFID Estimation With Blocker Tags. IEEE/ACM Trans. Netw. 2017, 25, 224–237. [Google Scholar] [CrossRef]
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: indoor location sensing using active RFID. In Proceedings of the First IEEE International Conference on Pervasive Computing and Communications, 2003. (PerCom 2003), Fort Worth, TX, USA, 23–26 March 2003; 2003; pp. 407–415. [Google Scholar]
- Zhao, Y.; Liu, Y.; Ni, L.M. VIRE: Active RFID-based Localization Using Virtual Reference Elimination. In Proceedings of the 2007 International Conference on Parallel Processing (ICPP 2007), Xian, China, 9–14 September 2007; p. 56. [Google Scholar]
- Deng, P.; Fan, P.Z. An AOA assisted TOA positioning system. In Proceedings of the WCC 2000—ICCT 2000. 2000 International Conference on Communication Technology Proceedings (Cat. No.00EX420), Beijing, China, 21–25 August 2000; Volume 2, pp. 1501–1504. [Google Scholar]
- Xu, H.; Ding, Y.; Li, P.; Wang, R.; Li, Y. An RFID Indoor Positioning Algorithm Based on Bayesian Probability and K-Nearest Neighbor. Sensors 2017, 17, 1806. [Google Scholar] [CrossRef]
- Almaaitah, A.; Ali, K.; Hassanein, H.S.; Ibnkahla, M. 3D Passive Tag Localization Schemes for Indoor RFID Applications. In Proceedings of the 2010 IEEE International Conference on Communications, Cape Town, South Africa, 23–27 May 2010; pp. 1–5. [Google Scholar]
- Maneesilp, J.; Wang, C.; Wu, H.; Tzeng, N.-F. RFID Support for Accurate 3D Localization. IEEE Trans. Comput. 2013, 62, 1447–1459. [Google Scholar] [CrossRef] [Green Version]
- 15 Zanaj, E.; Ranxha, G.; Kaso, A.; Zanaj, B. 3D localization method for RFID tags by using mobile readers and virtual reference tags. In Proceedings of the 2014 22nd International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 17–19 September 2014; pp. 51–55. [Google Scholar]
- Ai, Z.; Liu, Y. Research on the TDOA measurement of active RFID real time location system. In Proceedings of the 2010 3rd International Conference on Computer Science and Information Technology, Chengdu, China, 9–11 July 2010; pp. 410–412. [Google Scholar]
- Miesen, R.; Ebelt, R.; Kirsch, F.; Schafer, T.; Li, G.; Wang, H.; Vossiek, M. Where is the Tag? IEEE Microw. Mag. 2011, 12, S49–S63. [Google Scholar] [CrossRef]
- Shangguan, L.; Yang, Z.; Liu, A.X.; Zhou, Z.; Liu, Y. STPP: Spatial-Temporal Phase Profiling-Based Method for Relative RFID Tag Localization. IEEEACM Trans. Netw. 2017, 25, 596–609. [Google Scholar] [CrossRef]
- Shangguan, L.; Li, Z.; Yang, Z.; Li, M.; Liu, Y. OTrack: Order tracking for luggage in mobile RFID systems. In Proceedings of the 2013 IEEE INFOCOM, Turin, Italy, 14–19 April 2013; pp. 3066–3074. [Google Scholar]
- Wang, G.; Qian, C.; Shangguan, L.; Ding, H.; Han, J.; Yang, N.; Xi, W.; Zhao, J. HMRL: Relative Localization of RFID Tags with Static Devices. In Proceedings of the 2017 14th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), San Diego, CA, USA, 12–14 June 2017; pp. 1–9. [Google Scholar]
- Shen, L.; Zhang, Q.; Pang, J.; Xu, H.; Li, P. PRDL: Relative Localization Method of RFID Tags via Phase and RSSI Based on Deep Learning. IEEE Access 2019, 7, 20249–20261. [Google Scholar] [CrossRef]
- Ma, Y.; Wang, B.; Pei, S.; Zhang, Y.; Zhang, S.; Yu, J. An Indoor Localization Method Based on AOA and PDOA Using Virtual Stations in Multipath and NLOS Environments for Passive UHF RFID. IEEE Access 2018, 6, 31772–31782. [Google Scholar] [CrossRef]
- Yang, L.; Chen, Y.; Li, X.-Y.; Xiao, C.; Li, M.; Liu, Y. Tagoram: Real-time tracking of mobile RFID tags to high precision using COTS devices. In Proceedings of the 20th annual international conference on Mobile computing and networking—MobiCom ’14, Maui, HI, USA, 7–11 September 2014; pp. 237–248. [Google Scholar]
- Guidi, F.; Decarli, N.; Dardari, D.; Mani, F.; D’Errico, R. Millimeter-Wave Beamsteering for Passive RFID Tag Localization. IEEE J. Radio Freq. Identif. 2018, 2, 9–14. [Google Scholar] [CrossRef]
- Buffi, A.; Nepa, P.; Lombardini, F. A Phase-Based Technique for Localization of UHF-RFID Tags Moving on a Conveyor Belt: Performance Analysis and Test-Case Measurements. IEEE Sens. J. 2015, 15, 387–396. [Google Scholar] [CrossRef]
- Scherhaufl, M.; Pichler, M.; Stelzer, A. UHF RFID Localization Based on Evaluation of Backscattered Tag Signals. IEEE Trans. Instrum. Meas. 2015, 64, 2889–2899. [Google Scholar] [CrossRef]
- Fu, Y.; Wang, C.; Liu, R.; Liang, G.; Zhang, H.; Ur Rehman, S. Moving Object Localization Based on UHF RFID Phase and Laser Clustering. Sensors 2018, 18, 825. [Google Scholar] [CrossRef]
- Gharat, V.; Colin, E.; Baudoin, G.; Richard, D. Indoor performance analysis of LF-RFID based positioning system: Comparison with UHF-RFID and UWB. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Qiu, L.; Huang, Z.; Zhang, S.; Wang, W. RFID Tag Ranging Measurement Based on Multi-frequency Carrier Phase Difference. In Proceedings of the 2014 Seventh International Symposium on Computational Intelligence and Design, Hangzhou, China, 13–14, December 2014; pp. 245–248. [Google Scholar]
- Duan, C.; Yang, L.; Lin, Q.; Liu, Y. Tagspin: High Accuracy Spatial Calibration of RFID Antennas via Spinning Tags. IEEE Trans. Mob. Comput. 2018, 17, 2438–2451. [Google Scholar] [CrossRef]
- Tlili, F.; Hamdi, N.; Belghith, A. Accurate 3D localization scheme based on active RFID tags for indoor environment. In Proceedings of the 2012 IEEE International Conference on RFID-Technologies and Applications (RFID-TA); IEEE: Nice, France, 2012; pp. 378–382. [Google Scholar]
- Ballard, M.S. Doppler effect. J. Acoust. Soc. Am. 2010, 127, 1912. [Google Scholar] [CrossRef]
- Tong, H.C.; Wang, D. A Novel RFID Indoor Positioning System Based on Doppler Effect. Appl. Mech. Mater. 2014, 513–517, 3292–3295. [Google Scholar] [CrossRef]
- Buffi, A.; Nepa, P. A 2D localization technique for UHF-RFID smart bookshelves. In Proceedings of the 2016 IEEE International Symposium on Antennas and Propagation (APSURSI), Fajardo, Puerto Rico, 26 June–1 July 2016; pp. 1159–1160. [Google Scholar]
- Xu, H.; Wu, M.; Li, P.; Zhu, F.; Wang, R. An RFID Indoor Positioning Algorithm Based on Support Vector Regression. Sensors 2018, 18, 1504. [Google Scholar] [CrossRef]
- Guidi, F.; Decarli, N.; Dardari, D.; Natali, F.; Savioli, E.; Bottazzi, M. A Low Complexity Scheme for Passive UWB-RFID: Proof of Concept. IEEE Commun. Lett. 2016, 20, 676–679. [Google Scholar] [CrossRef]
- Guidi, F.; Decarli, N.; Bartoletti, S.; Conti, A.; Dardari, D. Detection of Multiple Tags Based on Impulsive Backscattered Signals. IEEE Trans. Commun. 2014, 62, 3918–3930. [Google Scholar] [CrossRef]
- Pang, J.; Shen, L.; Zhang, Q.; Xu, H.; Li, P. Design of Modern Logistics Management System Based on RFID and NB-IoT. In Proceedings of the Web, Artificial Intelligence and Network Applications; Barolli, L., Takizawa, M., Xhafa, F., Enokido, T., Eds.; Springer International Publishing: Matsue, Japan, 2019; pp. 561–569. [Google Scholar]





















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, L.; Zhang, Q.; Pang, J.; Xu, H.; Li, P.; Xue, D. ANTspin: Efficient Absolute Localization Method of RFID Tags via Spinning Antenna. Sensors 2019, 19, 2194. https://doi.org/10.3390/s19092194
Shen L, Zhang Q, Pang J, Xu H, Li P, Xue D. ANTspin: Efficient Absolute Localization Method of RFID Tags via Spinning Antenna. Sensors. 2019; 19(9):2194. https://doi.org/10.3390/s19092194
Chicago/Turabian StyleShen, Leixian, Qingyun Zhang, Jiayi Pang, He Xu, Peng Li, and Donghui Xue. 2019. "ANTspin: Efficient Absolute Localization Method of RFID Tags via Spinning Antenna" Sensors 19, no. 9: 2194. https://doi.org/10.3390/s19092194
APA StyleShen, L., Zhang, Q., Pang, J., Xu, H., Li, P., & Xue, D. (2019). ANTspin: Efficient Absolute Localization Method of RFID Tags via Spinning Antenna. Sensors, 19(9), 2194. https://doi.org/10.3390/s19092194