3.1. Multi-Rigid Body Dynamic Modeling of Laser Gyro IMU
Generally, the mechanical dither frequency of RLG is much lower than the first-order modal frequency of the sensor supporting structure in IMU. Therefore, the sensor supporting structure and the resonance cavity of RLG can be simplified into rigid bodies, and the dithering wheel is equivalent to a torsion spring. In the work of [
33], dynamic structures are simplified as multiple rigid bodies, springs, and hinges, and a topological diagram is used to represent the constraint relations of the dynamic model. On that basis, in this paper, the multi-rigid body dynamic model of the IMU structure is developed based on the method of topology analysis of constraint relations. The three elements, such as spring-damper units, multiple rigid bodies, and ideal constrained pairs, are combined with the topology form of constraint relations of IMU to describe the RLG’s dither and multi-point vibration isolation in IMU.
The modeling process is divided into four steps.
Step 1: Definitions of the basic elements of the multi-rigid body system of IMU
The vibration displacements of the centroid of single rigid body relative to the global coordinate system are defined as the generalized coordinates of the dynamic equation: ( is the serial number of bodies in the system). The generalized coordinates set as small angular displacements, which can be described by cardan angles.
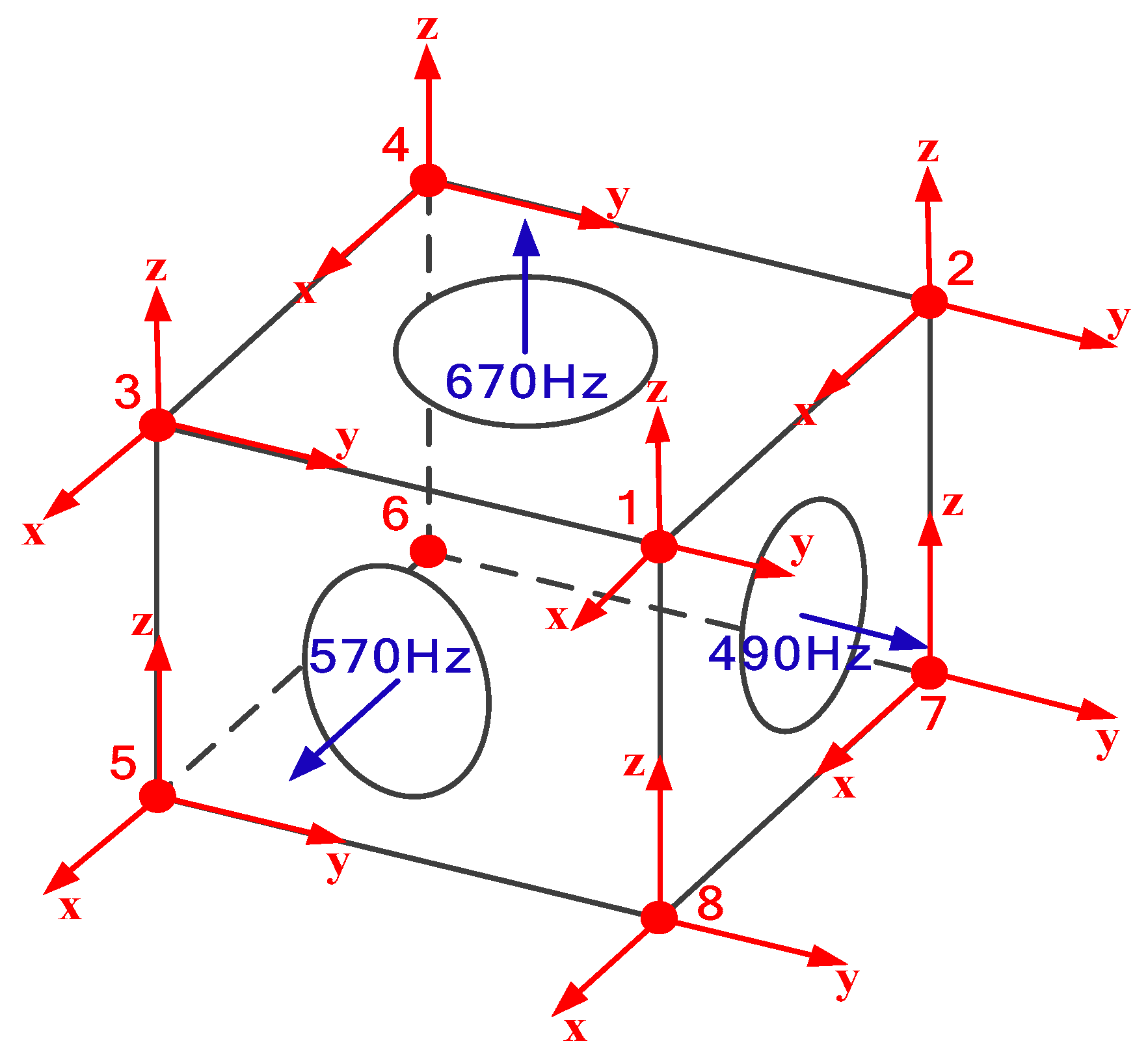
The schematic diagram of the IMU dynamic model is shown in
Figure 2, and the global coordinate system is defined as
, the dither coordinate systems of the three RLGs are
(
), and the local coordinate systems of eight vibration isolators are
(
). In this paper, the dynamic equation of IMU is described in the global coordinate system, which is fixed on the ground. The dither coordinate systems of RLGs and the coordinate systems of vibration isolators are fixed on the corresponding conjoined bases (i.e., three gyro cavities or eight vibration isolators), and they will change with the movements of the conjoined bases.
As shown in
Figure 2, the whole IMU dynamic model includes four motion units, such as the sensor supporting structure and three gyro cavities. Without considering the constraint relationship, the model contains 6
4 = 24 DOFs. Further, the rotation pair between the gyro cavity and the sensor support structure is defined to limit the other five DOFs between the IMU and each RLG, except the direction of dither. Whereby, the DOFs of model are finally reduced to nine, so the dynamic model is composed of a nine-order differential equation.
Step 2: Dynamic modeling of system without considering constraints
The serial numbers of the sensor supporting structure and the three gyro resonators are sequentially from 1 to 4. The centroid coordinate system of the sensor supporting structure coincides with the global coordinate system. The direction cosine matrix from the global coordinate system
to the three gyro local coordinate systems
is defined as
(
i = 2~4), then the system mass matrix in the global coordinate system
can be written as follows:
where
,
i = 2, 3, 4.
The stiffness matrices of eight vibration isolators in each of the local coordinate systems
can be written as follows:
Equation (2) considers the linear stiffness
of the vibration isolator along each of the three coordinate axes. The structure of the vibration isolator in IMU is given in
Figure 3, and the stiffness parameters in the three axes can be checked according to the product manual provided.
Correspondingly, the stiffness matrices of three gyro resonators in each local coordinate system
can be written as follows:
where the dither stiffness of RLG is
.
On the basis of the Lagrange method, without constraints, the dynamic equation of IMU can be derived as follows:
where
M is represented in Equation (1), and
K is as follows:
where
In Equations (6)–(9), (j = 1~8) and (i = 2~4) are the vibration displacement transfer matrix from the IMU centroid to the center of each vibration isolator and to the dither center of each RLG, respectively. (j = 1~8) and (i = 2~4) are the pose transformation matrix from the global coordinate system to the local coordinate system of each vibration isolator and to the local coordinate system of each RLG’s resonator, respectively.
Step 3: Topology analysis of the constraint relation
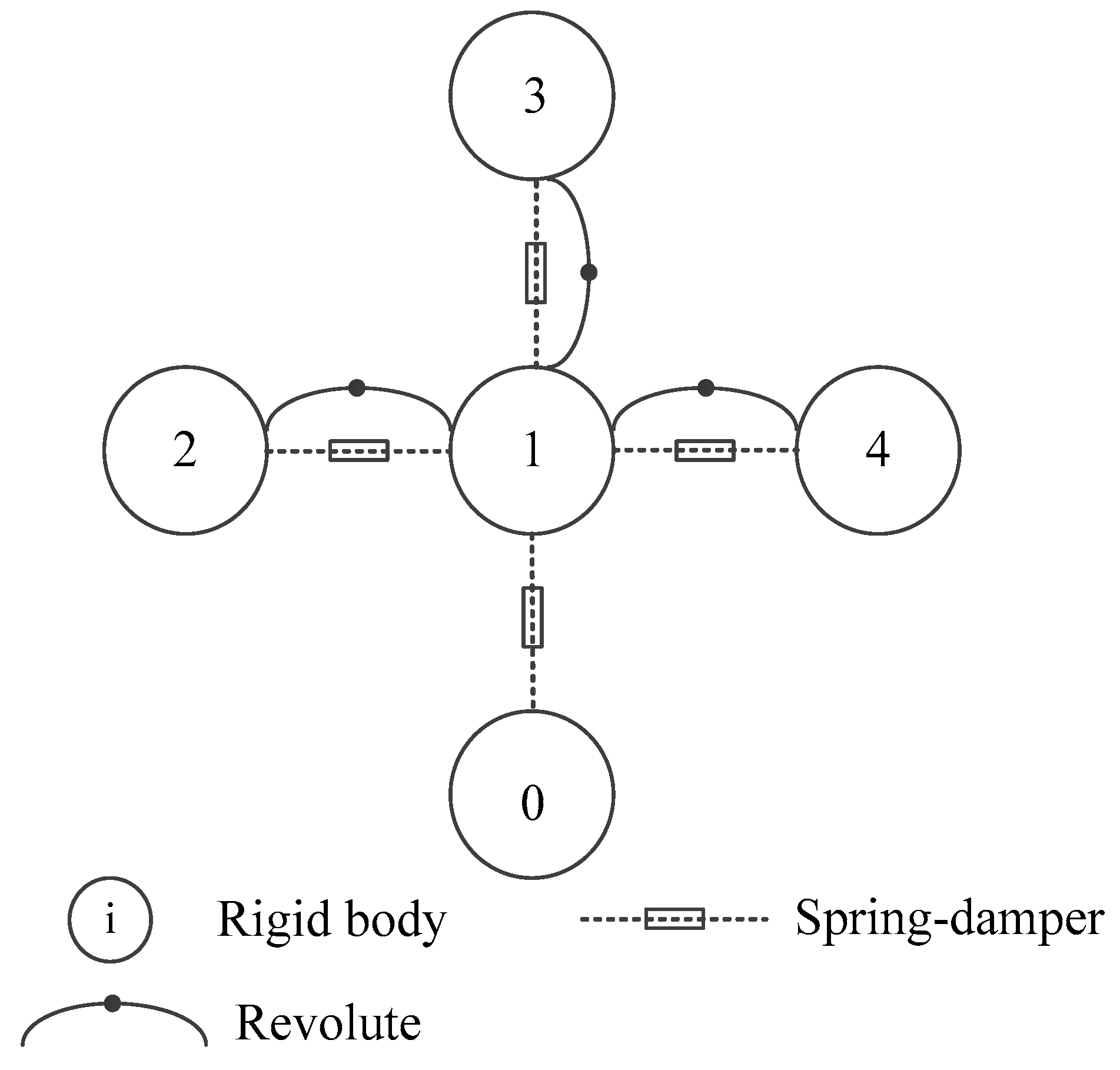
An additional revolute pair is applied between each RLG’s resonant cavity and the sensor supporting structure. Eight vibration isolators connecting the sensor supporting structure and the ground are equivalent to spring-dampers. The constraint topological form of IMU is shown in
Figure 4, in which the serial number 0 is the ground, 1 is the sensor supporting structure of IMU, and 2~4 are RLG’s resonant cavities.
The joint matrix
H and the variable separation matrix
D of each revolute pair are defined, respectively, as follows:
Considering the revolute constraints between the RLGs and IMU, the established constraint matrix of IMU is as follows:
where
Step 4: Dynamic modeling of the multi-rigid body system of IMU
Substituting the constraint matrix (12)–(14) into the dynamic Equation (4) of the non-constraint system, and considering the hysteresis damping characteristics of the rubber damper [
34] (i.e., the elastic and damping effects of the vibration isolator are
, where
is the hysteresis damping coefficient), meanwhile considering the quality factor
of RLG’s dither system, so the dynamic model of IMU can be obtained as follows:
In Equations (16)–(23), (i = 1~8) are the positions of eight vibration isolators relative to the centroid of IMU, and (i = 2~4) are the positions of three RLG’s cavities relative to the centroid of IMU. It should be emphasized that this paper focuses on the frequency response analysis of the coupled vibration behavior of three RLGs in IMU. Therefore, the external generalized force is not considered in the above dynamic model.
3.2. Discussion of Coupled Vibration Behavior of IMU
Through analyzing the stiffness matrix in Equations (15)–(23), we can find that the stiffness distribution of IMU is related to the positions of the vibration isolators relative to the IMU centroid (i = 1~8), besides the stiffness of the vibration isolators in three axes and the torsional stiffness of three RLGs in each dither direction.
Similarly, the mass distribution of the system is related to the mass properties of the sensor supporting structure (including the mass parameter and inertia parameters ), the inertia of each RLG along the respective dither directions, and the positions (i = 2~4) of three RLGs relative to the centroid of the IMU.
The discussion of the coupled vibration behavior of the IMU under gyro dither is equivalent to the diagonalizing study of the mass matrix and stiffness matrix in the dynamic Equations (15)–(23). Therefore, the conditions for vibration decoupling of IMU can be derived as follows:
- (1)
The IMU centroid coincides with the equivalent elastic center of the vibration isolators, that is, the eight vibration isolators, are symmetrically distributed with respect to the IMU. At this time, the stiffness matrix
in the model is diagonalized. The specific condition is as follows:
- (2)
The principle inertia axes in the IMU centroid coordinate system are respectively along the dither axes of each RLG, that is, the non-diagonal terms in the mass matrix are zero. At this time, the inertia matrix
in the model is diagonalized. The specific condition is as follows:
The similar decoupling studies can be found in the literatures [
23,
24,
25,
26], such as Equations (16)–(18) in the work of [
23],
Section 3.1 in the work of [
25], and
Section 4 in the work of [
26]. Among the above previous studies, the work of [
26] is the relatively recent study on the optimal design of the laser gyro IMU, where a new skewed redundant IMU by employing four RLGs is designed, and the dithered coupling of RLGs in the redundant configuration of IMU is considered. In the work of [
26], the methods of increasing the weight of the IMU and allocating the RLGs’ frequencies reasonably are applied to reduce the coupled vibration, but no analytical model representing the coupled dynamics of IMU and relevant decoupling optimization method are involved.
Unlike the work of [
26], other papers [
23,
24,
25] propose similar decoupling conditions (i.e., the inertia product in the mass matrix is 0, namely
) as Equations (24) and (25) in this paper.
By comparing the IMU dynamic decoupling conditions in Equations (24) and (25) and the previous decoupling conditions in the works of [
23,
24,
25], some conclusions could be derived as follows:
- (1)
The proposed decoupling condition such as Equation (25) is more general, compared with those in the works of [
23,
24,
25]. The reason is that, in the actual IMU structure, the distance from the centroid of the IMU to each RLG is always not 0 (i.e.,
,
,
), in that case, the dynamic decoupling is not achieved just by satisfying the equation
.
- (2)
On the other hand, the condition of means a fully symmetrical structure of IMU, which is also not easy to be satisfied in the actual design of INS owing to other design requirements (such as mass, size, and layouts of PCBs or sensors).
In summary, no matter which decoupling conditions are considered, such as Equations (24)–(25) in this paper or the similar ones in the works of [
23,
24,
25], they are all based on the diagonalizing of the system stiffness and the mass matrices. However, in order to obtain the minimum-coupled vibration response of the IMU, as well as improve the engineering availability, it is still necessary to analyze the vibration response in the frequency domain, so as to propose a new optimal design method for the IMU structure, which will be focused in the next section in this paper.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}