Closing the Wearable Gap—Part V: Development of a Pressure-Sensitive Sock Utilizing Soft Sensors

 ,
,  ,
, 
 ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Study Design
2.3. Instrumentation and Participant Preparation
2.4. Movements
2.5. Experimental Procedures
2.6. Data Processing
2.7. Statistical Analysis
3. Results
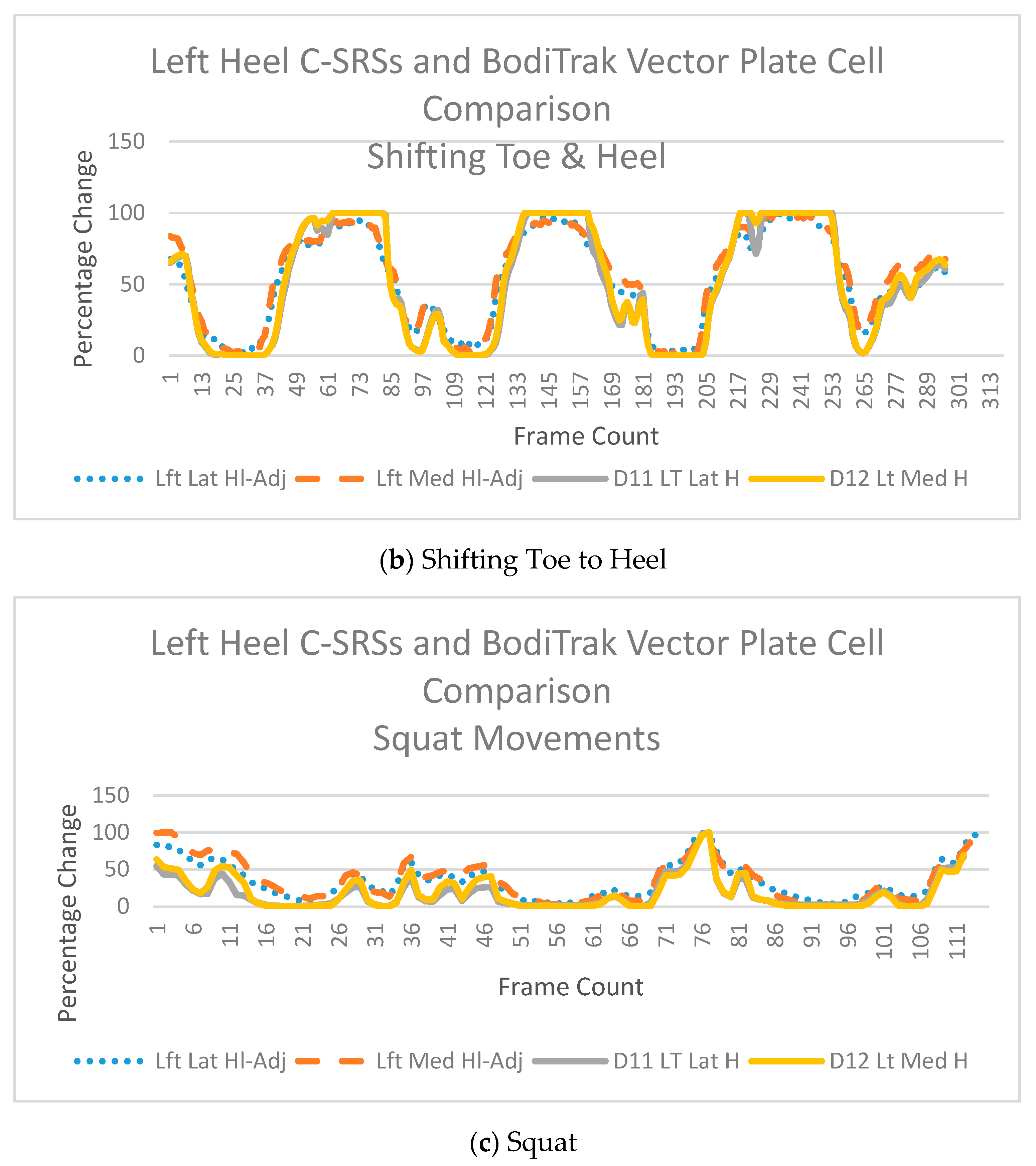
3.1. Comparison of C-SRS to the BodiTrakTM Vector Plate
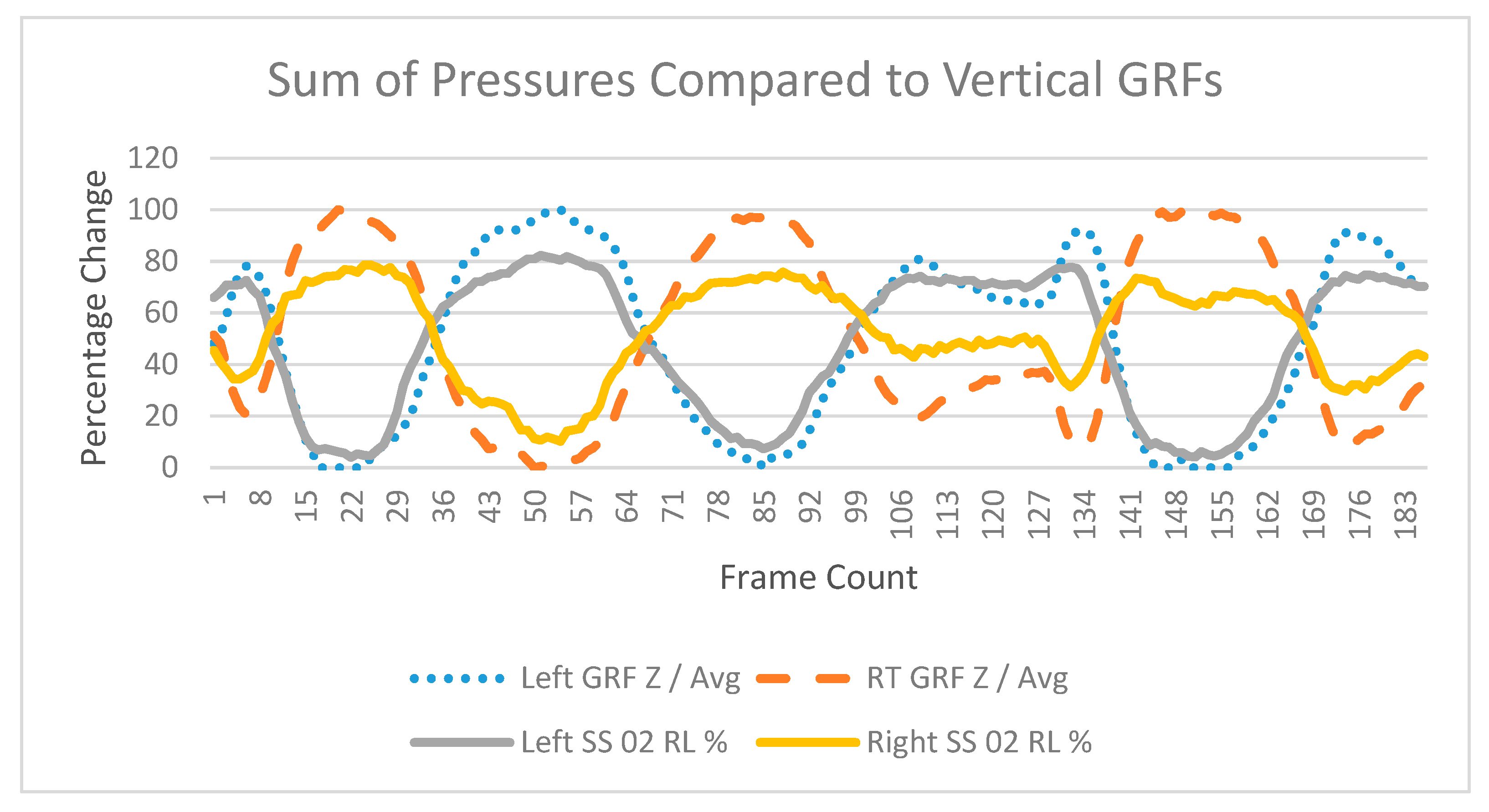
3.2. Comparison of C-SRS to Force Plates
3.3. Autoregressive Integrated Moving Average
3.4. Sensor Orientation
4. Discussion
4.1. Autoregressive Integrated Moving Average Model (ARIMA)
4.2. Mean R2
4.3. Mean RMSE
4.4. GRPS Applications and Configurations
4.5. Limitations
4.6. Future Research
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Luczak, T.; Saucier, D.; Burch, V.; Ball, J.; Chander, H.; Knight, A.; Wei, P.; Iftekhar, T. Closing the wearable gap: Mobile systems for kinematic signal monitoring of the foot and ankle. Electronics 2018, 7, 117. [Google Scholar] [CrossRef] [Green Version]
- Luczak, T.; Burch, R.; Lewis, E.; Chander, H.; Ball, J. State-of-the-art review of athletic wearable technology: What 113 strength and conditioning coaches and athletic trainers from the USA said about technology in sports. Int. J. Sports Sci. Coach. 2019. [Google Scholar] [CrossRef]
- Saucier, D.; Luczak, T.; Nguyen, P.; Davarzani, S.; Peranich, P.; Ball, J.E.; Burch, R.F.; Smith, B.K.; Chander, H.; Knight, A.; et al. Closing the Wearable Gap—Part. II: Sensor Orientation and Placement for Foot and Ankle Joint Kinematic Measurements. Sensors 2019, 19, 3509. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chander, H.; Stewart, E.; Saucier, D.; Nguyen, P.; Luczak, T.; Ball, J.E.; Knight, A.C.; Smith, B.K.; Prabhu, R.K. Closing the Wearable Gap—Part. III: Use of Stretch Sensors in Detecting Ankle Joint Kinematics During Unexpected and Expected Slip and Trip Perturbations. Electronics 2019, 8, 1083. [Google Scholar] [CrossRef] [Green Version]
- Saucier, D.; Davarzani, S.; Turner, A.; Luczak, T.; Nguyen, P.; Carroll, W.; FBurch, V.R.; Ball, J.E.; Smith, B.K.; Chander, H.; et al. Closing the Wearable Gap—Part. IV: 3D Motion Capture Cameras Versus Soft Robotic Sensors Comparison of Gait Movement Assessment. Electronics. Electronics 2019, 8, 1382. [Google Scholar] [CrossRef] [Green Version]
- Bunton, E.E.; Pitney, W.A.; Cappaert, T.A.; Kane, A.W. The role of limb torque, muscle action and proprioception during closed kinetic chain rehabilitation of the lower extremity. J. Athl. Train. 1993, 28, 10. [Google Scholar]
- Beckham, G.; Suchomel, T.; Mizuguchi, S. Force plate use in performance monitoring and sport science testing. New Stud. Athl. 2014, 3, 25–37. [Google Scholar]
- Mengüç, Y.; Park, Y.L.; Martinez-Villalpando, E.; Aubin, P.; Zisook, M.; Stirling, L.; Wood, R.J.; Walsh, C.J. Soft wearable motion sensing suit for lower limb biomechanics measurements. In Proceedings of the 2013 IEEE International Conference on. Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013. [Google Scholar] [CrossRef]
- Trung, T.Q.; Lee, N.E. Flexible and Stretchable Physical Sensor Integrated Platforms for Wearable Human-Activity Monitoringand Personal Healthcare. Adv. Mater. 2016, 28, 4338–4372. [Google Scholar] [CrossRef]
- Yeo, J.C.; Lim, C.T. Emerging flexible and wearable physical sensing platforms for healthcare and biomedical applications. Microsyst. Nanoeng. 2016, 2. [Google Scholar] [CrossRef]
- Atalay, A.; Sanchez, V.; Atalay, O.; Vogt, D.M.; Haufe, F.; Wood, R.J.; Walsh, C.J. Batch Fabrication of Customizable Silicone-Textile Composite Capacitive Strain Sensors for Human Motion Tracking. Adv. Mater. Technol. 2017. [Google Scholar] [CrossRef] [Green Version]
- Yin, J.; Aspinall, P.; Santos, V.J.; Posner, J.D. Measuring Dynamic Shear Force and Vibration With a Bioinspired Tactile Sensor Skin. IEEE Sens. J. 2018, 18, 3544–3553. [Google Scholar] [CrossRef]
- Miodownik, M.; Oldfrey, B.; Jackson, R.; Smitham, P. A deep learning approach to non-linearity in wearable stretch sensors. Front. Robot. AI 2019, 6, 27. [Google Scholar] [CrossRef] [Green Version]
- Cai, L.; Song, L.; Luan, P.; Zhang, Q.; Zhang, N.; Gao, Q.; Zhao, D.; Zhang, X.; Tu, M.; Yang, F.; et al. Super-stretchable, transparent carbon nanotube-based capacitive strain sensors for human motion detection. Sci. Rep. 2013, 3, 3048. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yao, S.; Zhu, Y. Wearable multifunctional sensors using printed stretchable conductors made of silver nanowires. Nanoscale 2014, 6, 2345–2352. [Google Scholar] [CrossRef] [PubMed]
- Amjadi, M.; Kyung, K.U.; Park, I.; Sitti, M. Stretchable, skin-mountable, and wearable strain sensors and their potential applications: A review. Adv. Funct. Mater. 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- Martinelli, L.; Hurschler, C.; Rosenbaum, D. Comparison of capacitive versus resistive joint contact stress sensors. Clin. Orthop. Relat. Res. 2006, 447, 214–220. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Urry, S. Plantar pressure-measurement sensors. Meas. Sci. Technol. 1999, 10, R16. [Google Scholar] [CrossRef]
- Chesnin, K.J.; Selby-Silverstein, L.; Besser, M.P. Comparison of an in-shoe pressure measurement device to a force plate: Concurrent validity of center-of-pressure measurements. Gait Posture 2000, 12, 128–133. [Google Scholar] [CrossRef]
- Saito, M.; Nakajima, K.; Takano, C.; Ohta, Y.; Sugimoto, C.; Ezoe, R.; Sasaki, K.; Hosaka, H.; Ifukube, T.; Ino, S.; et al. An in-shoe device to measure plantar pressure during daily human activity. Med. Eng. Phys. 2011, 33, 638–645. [Google Scholar] [CrossRef]
- Renner, K.E.; Williams, D.S.; Queen, R.M. The reliability and validity of the Loadsol® under various walking and running conditions. Sensors 2019, 19, 265. [Google Scholar] [CrossRef] [Green Version]
- Ito, K.; Maeda, K.; Fujiwara, I.; Hosoda, K.; Nagura, T.; Lee, T.; Ogihara, N. Dynamic measurement of surface strain distribution on the foot during walking. J. Mech. Behav. Biomed. Mater. 2017, 69, 249–256. [Google Scholar] [CrossRef] [PubMed]
- Ravi, D.; Wong, C.; Lo, B.; Yang, G.Z. A deep learning approach to on-node sensor data analytics for mobile or wearable devices. IEEE J. Biomed. Health Inf. 2016, 21, 56–64. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, G.; Wang, Y. Automatic ARIMA modeling-based data aggregation scheme in wireless sensor networks. EURASIP J. Wirel. Commun. Netw. 2013, 2013, 85. [Google Scholar] [CrossRef]
- Connor, J.T.; Martin, R.D.; Atlas, L.E. Atlas, Recurrent neural networks and robust time series prediction. IEEE Trans. Neural Netw. 1994, 5, 240–254. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ma, Z.; Li, B.C.; Yan, Z. Wearable driver drowsiness detection using electrooculography signal. In Proceedings of the 2016 IEEE Topical Conference on Wireless Sensors and Sensor Networks (WiSNet), Austin, TX, USA, 24–27 January 2016. [Google Scholar] [CrossRef]
- Thomas, S.; Reading, J.; Shephard, R.J. Revision of the physical activity readiness questionnaire (PAR-Q). Can. J. Sport Sci. 1992, 17, 338–345. [Google Scholar] [PubMed]
- Cordero, A.F.; Koopman, H.J.F.M.; Van Der Helm, F.C.T. Use of pressure insoles to calculate the complete ground reaction forces. J. Biomech. 2004, 37, 1427–1432. [Google Scholar] [CrossRef] [PubMed]
- EPA. 40 CFR Parts 58-Ambient Air Quality Surveillance (Subchapter C); Environmental Protection Agency: Washington, DC, USA, 2016.
- Sousan, S.; Gray, A.; Zuidema, C.; Stebounova, L.; Thomas, G.; Koehler, K.; Peters, T. Sensor selection to improve estimates of particulate matter concentration from a low-cost network. Sensors 2018, 18, 3008. [Google Scholar] [CrossRef] [Green Version]
- Fong, D.T.P.; Chan, Y.Y.; Hong, Y.; Yung, P.S.H.; Fung, K.Y.; Chan, K.M. Estimating the complete ground reaction forces with pressure insoles in walking. J. Biomech. 2008, 41, 2597–2601. [Google Scholar] [CrossRef] [Green Version]
- Doherty, S.T.; Greaves, S.P. Time-series analysis of continuously monitored blood glucose: The impacts of geographic and daily lifestyle factors. J. Diabetes Res. 2015, 2015, 804341. [Google Scholar] [CrossRef]
- Ridenour, T.A.; Pineo, T.Z.; Molina, M.M.M.; Lich, K.H. Toward rigorous idiographic research in prevention science: Comparison between three analytic strategies for testing preventive intervention in very small samples. Prev. Sci. 2013, 14, 267–278. [Google Scholar] [CrossRef]
- Winter, D.A. Biomechanics and Motor Control of Human Movement; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Left Foot | Right Foot | |||||||
|---|---|---|---|---|---|---|---|---|
| Squat C-SRSs in A/P Orientation | Squat C-SRSs in M/L Orientation | Squat C-SRSs in A/P Orientation | Squat C-SRSs in M/L Orientation | |||||
| Mean R | SD | Mean R | SD | Mean R | SD | Mean R | SD | |
| Lateral Heel | 0.796 | 0.129 | 0.789 | 0.118 | 0.6839 | 0.312 | 0.526 | 0.468 |
| Medial Heel | 0.692 | 0.253 | 0.659 | 0.168 | 0.68 | 0.336 | 0.964 | 0.274 |
| Fifth Metatarsal | 0.699 | 0.258 | 0.704 | 0.158 | 0.69 | 0.207 | 0.614 | 0.255 |
| Mid-Metatarsal | 0.681 | 0.326 | 0.685 | 0.224 | 0.682 | 0.188 | 0.753 | 0.129 |
| First Metatarsal | 0.755 | 0.192 | 0.652 | 0.296 | 0.725 | 0.195 | 0.741 | 0.139 |
| Right to Left C-SRSs in A/P Orientation | Right to Left C-SRSs in M/L Orientation | Right to Left C-SRSs in A/P Orientation | Right to Left C-SRSs in M/L Orientation | |||||
| Mean R | SD | Mean R | SD | Mean R | SD | Mean R | SD | |
| Lateral Heel | 0.922 | 0.076 | 0.892 | 0.785 | 0.785 | 0.247 | 0.854 | 0.252 |
| Medial Heel | 0.927 | 0.100 | 0.826 | 0.216 | 0.932 | 0.026 | 0.837 | 0.212 |
| Fifth Metatarsal | 0.895 | 0.080 | 0.866 | 0.122 | 0.843 | 0.107 | 0.819 | 0.233 |
| Mid-Metatarsal | 0.835 | 0.111 | 0.775 | 0.178 | 0.759 | 0.122 | 682.000 | 0.250 |
| First Metatarsal | 0.814 | 0.078 | 0.653 | 0.257 | 0.761 | 0.170 | 0.705 | 0.236 |
| Toe to Heel C-SRSs in A/P Orientation | Toe to Heel C-SRSs in M/L Orientation | Toe to Heel C-SRSs in A/P Orientation | Toe to Heel C-SRSs in M/L Orientation | |||||
| Mean R | SD | Mean R | SD | Mean R | SD | Mean R | SD | |
| Lateral Heel | 0.932 | 0.087 | 0.942 | 0.058 | 0.758 | 0.362 | 0.810 | 0.320 |
| Medial Heel | 0.911 | 0.113 | 0.947 | 0.031 | 0.918 | 0.101 | 0.945 | 0.030 |
| Fifth Metatarsal | 0.863 | 0.112 | 0.859 | 0.068 | 0.792 | 0.086 | 0.874 | 0.097 |
| Mid-Metatarsal | 0.916 | 0.075 | 0.821 | 0.247 | 0.874 | 0.097 | 0.861 | 0.159 |
| First Metatarsal | 0.861 | 0.085 | 0.885 | 0.092 | 0.757 | 0.157 | 0.826 | 0.158 |
| Stretchsense Sensor Correlation to GRFs—Shifting Right to Left | ||||||||
|---|---|---|---|---|---|---|---|---|
| A/P Sensor Orientation | A/P Sensor Orientation | |||||||
| ID | Foot | Left GRF Z | Left GRF X | Left GRF Y | Foot | Right GRF Z | Right GRF X | Right GRF Y |
| 1 | Left C-SRS | 0.988 ** | 0.894 ** | 0.51 ** | Right C-SRS | 0.986 ** | 0.898 ** | 0.535 ** |
| 2 | Left C-SRS | 0.968 ** | 0.851 ** | 0.255 ** | Right C-SRS | 0.93 ** | 0.816 ** | 0.298 ** |
| 3 | Left C-SRS | 0.910 ** | 0.577 ** | 0.894 ** | Right C-SRS | 0.972 ** | 0.663 ** | 0.944 ** |
| 4 | Left C-SRS | 0.959 ** | 0.944 ** | 0.927 ** | Right C-SRS | 0.947 ** | 0.94 ** | 0.835 ** |
| 5 | Left C-SRS | 0.910 ** | 0.905 ** | 0.888 ** | Right C-SRS | 0.949 ** | 0.933 ** | 0.429 ** |
| 6 | Left C-SRS | 0.978 ** | 0.974 ** | 0.954 ** | Right C-SRS | 0.978 ** | 0.974 ** | 0.634 ** |
| 7 | Left C-SRS | 0.994 ** | 0.989 ** | 0.969 ** | Right C-SRS | 0.952 ** | 0.952 ** | 0.951 ** |
| 8 | Left C-SRS | 0.940 ** | 0.418 ** | 0.528 ** | Right C-SRS | 0.78 ** | 0.058 | 0.779 ** |
| 9 | Left C-SRS | 0.918 ** | 0.858 ** | 0.527 ** | Right C-SRS | 0.943 ** | 0.644 ** | 0.872 ** |
| 10 | Left C-SRS | 0.865 ** | 0.77 ** | 0.545 ** | Right C-SRS | 0.873 ** | 0.638 ** | 0.69 ** |
| 11 | Left C-SRS | 0.966 ** | 0.886 ** | 0.872 ** | Right C-SRS | 0.967 ** | 0.935 ** | 0.886 ** |
| 12 | Left C-SRS | 0936 ** | 0.779 ** | 0.122 ** | Right C-SRS | 0.794 ** | 0.544 ** | 0.488 ** |
| 13 | Left C-SRS | 0.974 ** | 0.644 ** | 0.716 ** | Right C-SRS | 0.936 ** | 0.814 ** | 0.625 ** |
| M/L Sensor Orientation | M/L Sensor Orientation | |||||||
| ID | Foot | Left GRF Z | Left GRF X | Left GRF Y | Foot | Right GRF Z | Right GRF X | Right GRF Y |
| 1 | Left C-SRS | 0.966 ** | 0.861 ** | 0.386 ** | Right C-SRS | 0.968 ** | 0.878 ** | 0.396 ** |
| 2 | Left C-SRS | 0.909 ** | 0.803 ** | 0.391 ** | Right C-SRS | 0.945 ** | 0.909 ** | 0.477 ** |
| 3 | Left C-SRS | 0.979 ** | 0.644 ** | 0.971 ** | Right C-SRS | 0.977 ** | 0.679 ** | 0.959 ** |
| 4 | Left C-SRS | 0966 ** | 0.958 ** | 0.944 ** | Right C-SRS | 0.973 ** | 0.968 ** | 0.88 ** |
| 5 | Left C-SRS | 0.914 ** | 0.923 ** | 0.829 ** | Right C-SRS | 0.93 ** | 0.92 ** | 0.325 ** |
| 6 | Left C-SRS | 0.989 ** | 0.989 ** | 0.966 ** | Right C-SRS | 0.989 ** | 0.988 ** | 0.828 ** |
| 7 | Left C-SRS | 0.975 ** | 0.389 ** | 0.759 ** | Right C-SRS | 0.969 ** | 0.157 ** | 0.747 ** |
| 8 | Left C-SRS | 0.980 ** | 0.452 ** | 0.572 ** | Right C-SRS | 0.971 ** | 0.297 ** | 0.872 ** |
| 9 | Left C-SRS | 0.926 ** | 0.777 ** | 0.527 ** | Right C-SRS | 0.863 ** | 0.443 ** | 0.772 ** |
| 10 | Left C-SRS | 0.875 ** | 0.777 ** | 0.533 ** | Right C-SRS | 0.835 ** | 0.765 ** | 0.804 ** |
| 11 | Left C-SRS | 0.930 ** | 0.831 ** | 0.798 ** | Right C-SRS | 0.983 ** | 0.868 ** | 0.922 ** |
| 12 | Left C-SRS | 0.900 ** | 0.863 ** | 0.153 ** | Right C-SRS | 0.914 ** | 0.772 ** | 0.705 ** |
| 13 | Left C-SRS | 0.950 ** | 0.686 ** | 0.486 ** | Right C-SRS | 0.898 ** | 0.754 ** | 0.835 ** |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luczak, T.; Burch V, R.F.; Smith, B.K.; Carruth, D.W.; Lamberth, J.; Chander, H.; Knight, A.; Ball, J.E.; Prabhu, R.K. Closing the Wearable Gap—Part V: Development of a Pressure-Sensitive Sock Utilizing Soft Sensors. Sensors 2020, 20, 208. https://doi.org/10.3390/s20010208
Luczak T, Burch V RF, Smith BK, Carruth DW, Lamberth J, Chander H, Knight A, Ball JE, Prabhu RK. Closing the Wearable Gap—Part V: Development of a Pressure-Sensitive Sock Utilizing Soft Sensors. Sensors. 2020; 20(1):208. https://doi.org/10.3390/s20010208
Chicago/Turabian StyleLuczak, Tony, Reuben F. Burch V, Brian K. Smith, Daniel W. Carruth, John Lamberth, Harish Chander, Adam Knight, J.E. Ball, and R.K. Prabhu. 2020. "Closing the Wearable Gap—Part V: Development of a Pressure-Sensitive Sock Utilizing Soft Sensors" Sensors 20, no. 1: 208. https://doi.org/10.3390/s20010208
APA StyleLuczak, T., Burch V, R. F., Smith, B. K., Carruth, D. W., Lamberth, J., Chander, H., Knight, A., Ball, J. E., & Prabhu, R. K. (2020). Closing the Wearable Gap—Part V: Development of a Pressure-Sensitive Sock Utilizing Soft Sensors. Sensors, 20(1), 208. https://doi.org/10.3390/s20010208