Study of Lateral Displacements and the Natural Frequency of a Pedestrian Bridge Using Low-Cost Cameras



Abstract
:1. Introduction
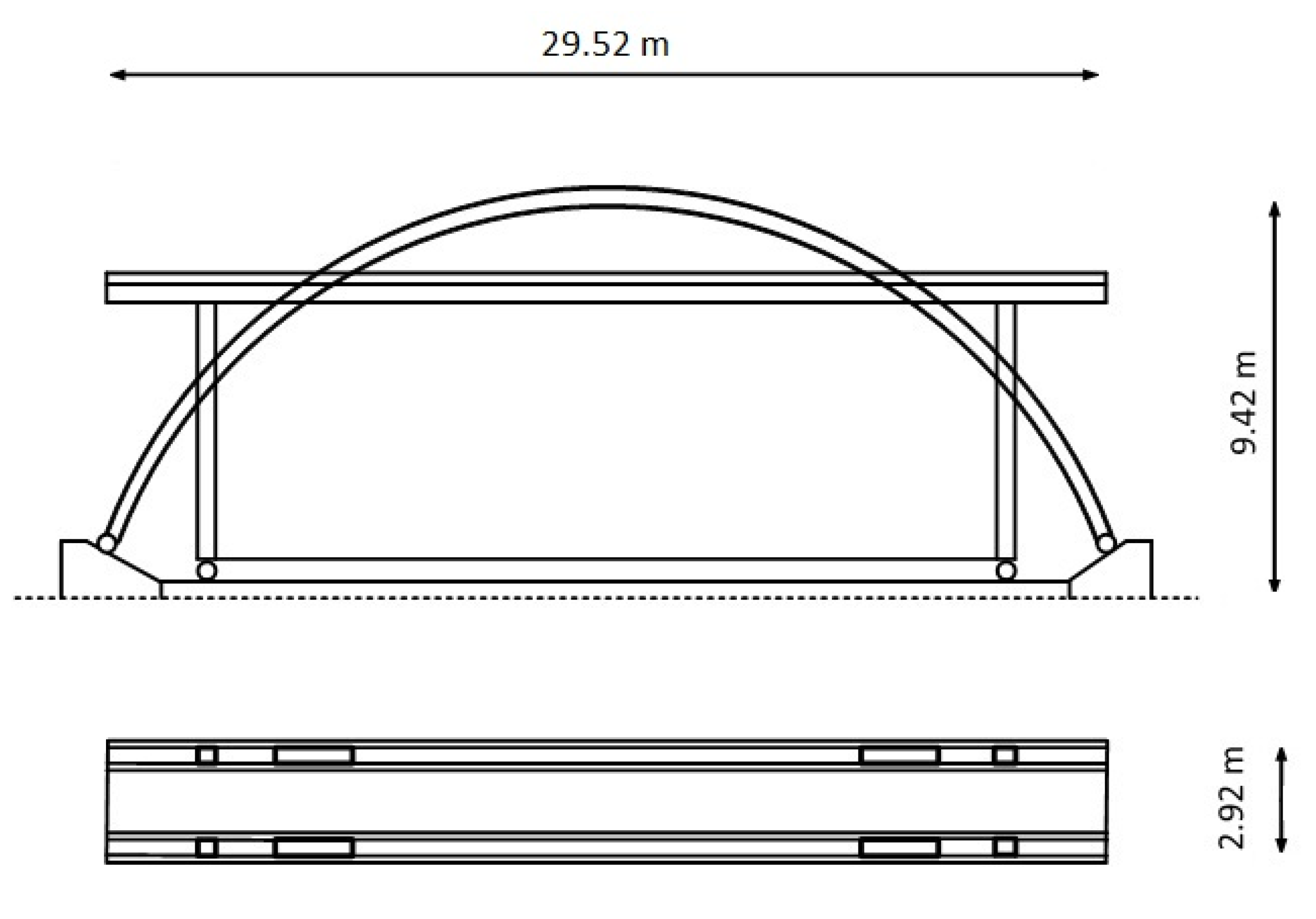
2. The Kanellopoulos Timber Bridge and its Decay
3. Methodology
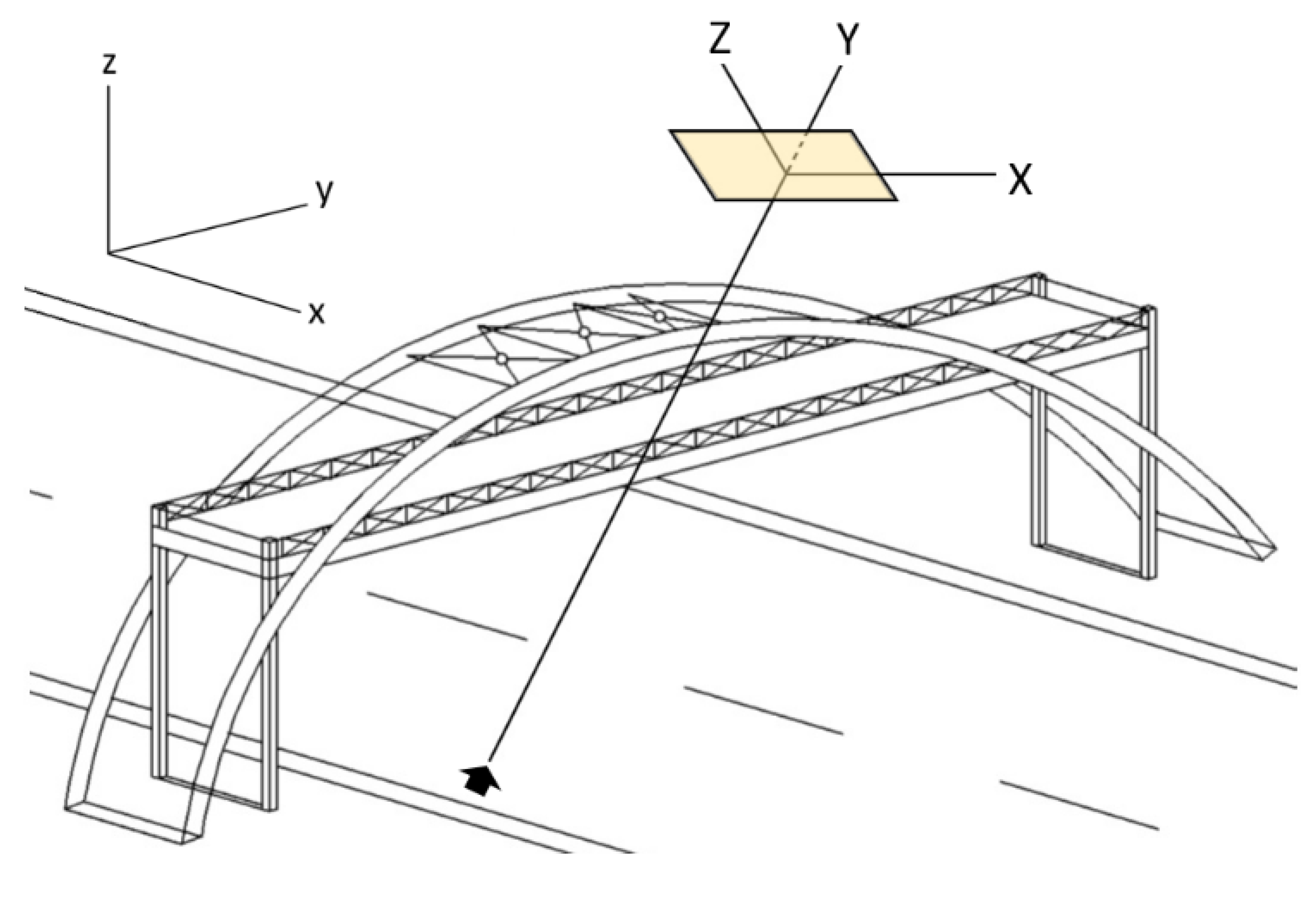
3.1. Bridge Quasi-Planar Dynamic Displacements and Impacts in Vision-Based Monitoring
3.2. Computation of Displacements
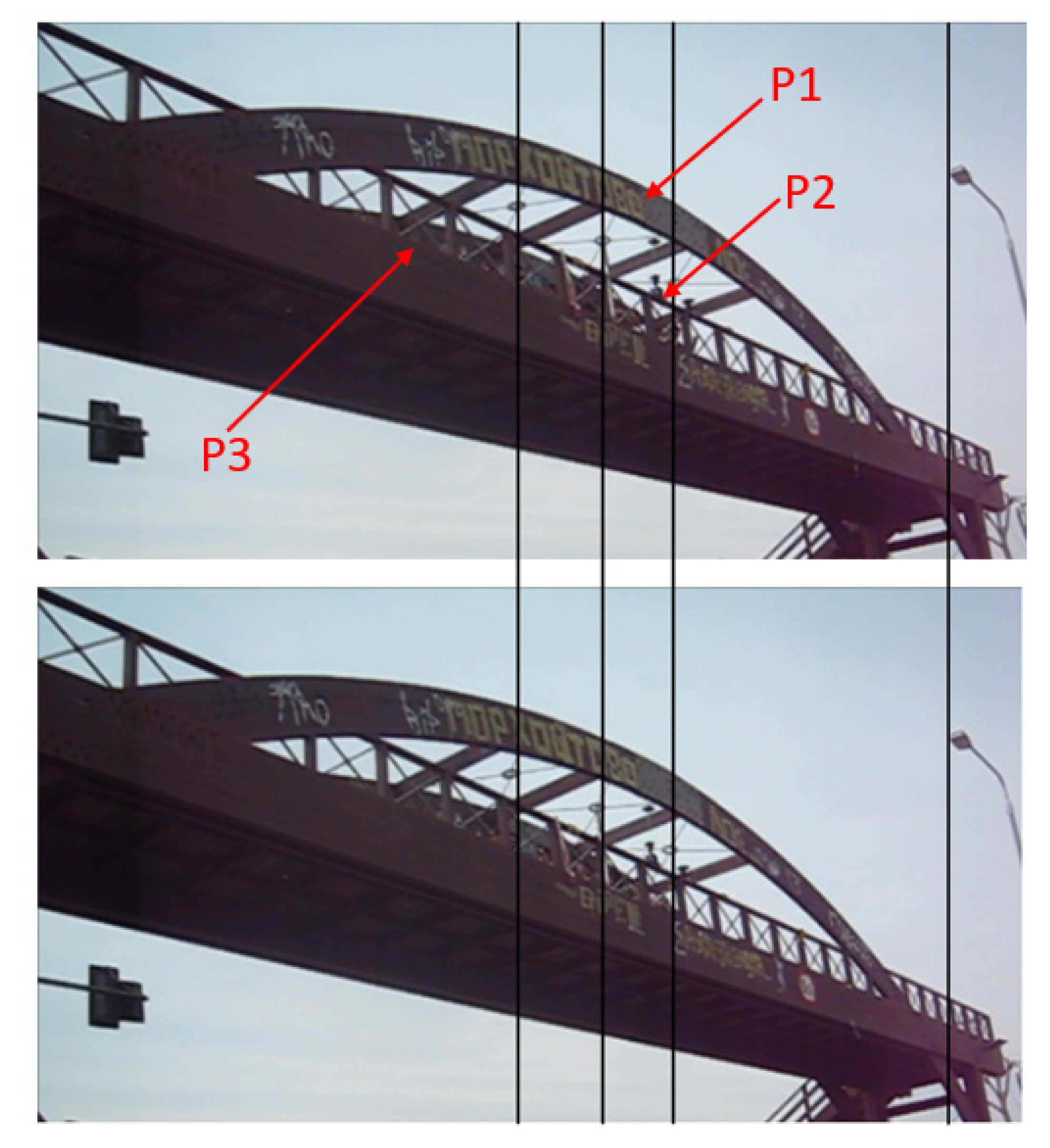
3.2.1. Digitization of the Motion of a Selected Point of the Deforming Bridge
3.2.2. Scale Correction
3.2.3. Rotation of Images
3.3. Computation of Certain Dynamic Characteristics of the Bridge
4. Data
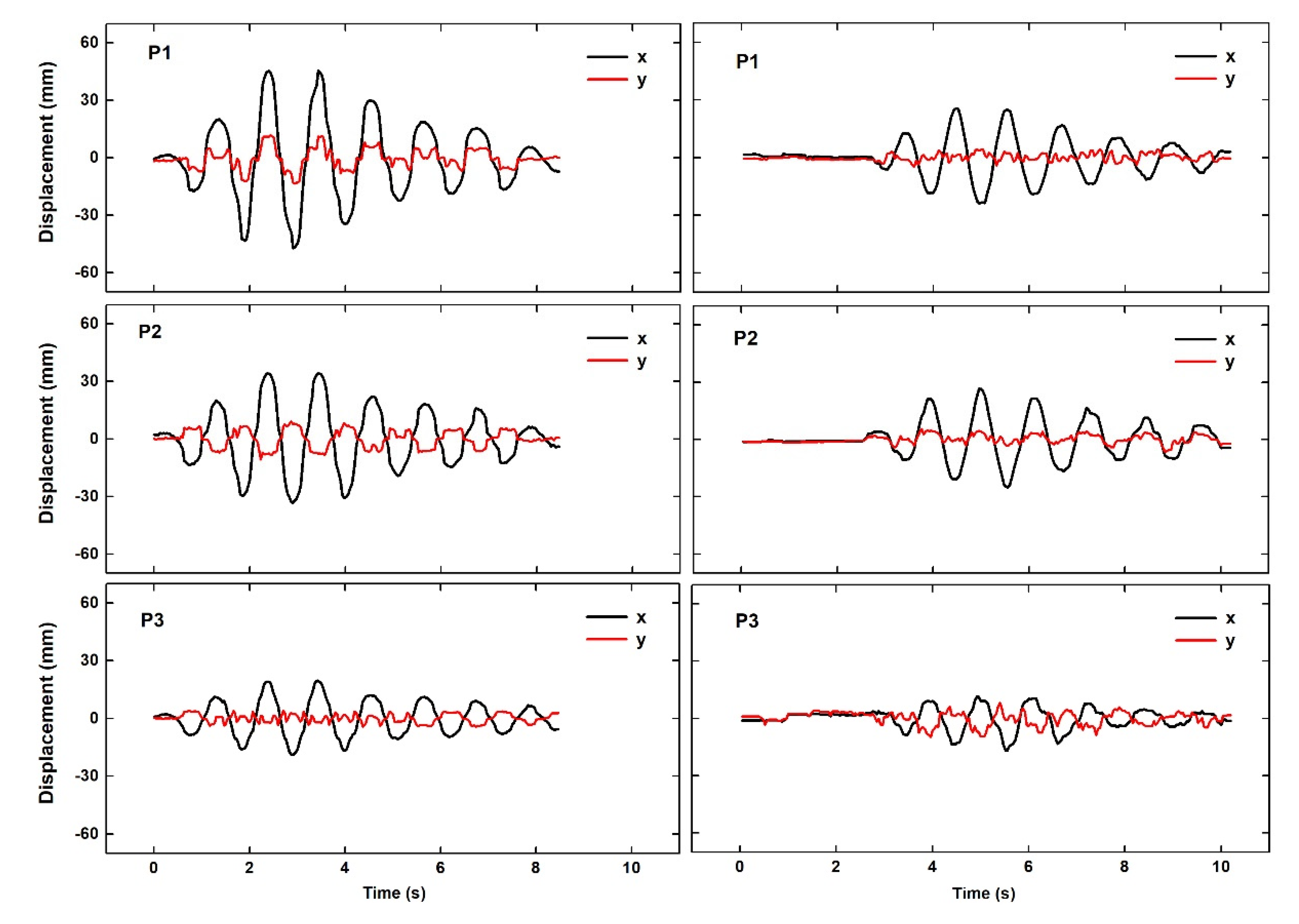
5. Computation of Horizontal Deflections
6. Structural Characteristics of the Bridge
7. Discussion
7.1. Data Validation
7.1.1. Statistical Significance
7.1.2. Consistency with Structural Constraints
7.2. Possible Structural Implications for the Kanellopoulos Bridge
7.3. Limitations and Applications of the Method
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- Baqersad, J.; Poozesh, P.; Niezrecki, C.; Avitabile, P. Photogrammetry and optical methods in structural dynamics—A review. Mech. Syst. Signal Process. 2017, 86, 17–34. [Google Scholar] [CrossRef]
- Xu, Y.; Brownjohn, J.M.W. Review of machine-vision based methodologies for displacement measurement in civil structures. J. Civ. Struct. Health Monit. 2018, 8, 91–110. [Google Scholar] [CrossRef] [Green Version]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: Cambridge, UK, 2003; ISBN 9780521540513. [Google Scholar]
- Shan, B.; Wang, L.; Huo, X.; Yuan, W.; Xue, Z. A Bridge Deflection Monitoring System Based on CCD. Adv. Mater. Sci. Eng. 2016. [Google Scholar] [CrossRef] [Green Version]
- Feng, D.; Feng, M.Q. Computer vision for SHM of civil infrastructure: From dynamic response measurement to damage detection—A review. Eng. Struct. 2018, 156, 105–117. [Google Scholar] [CrossRef]
- Mas, D.; Espinosa, J.; Roig, A.B.; Ferrer, B.; Perez, J.; Illueca, C. Measurement of wide frequency range structural microvibrations with a pocket digital camera and sub-pixel techniques. Appl. Opt. 2012, 51, 2664–2671. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, Y.; Dorn, C.; Mancini, T.; Talken, Z.; Kenyon, G.; Farrar, C.; Mascareñas, D. Blind identification of full-field vibration modes from video measurements with phase-based video motion magnification. Mech. Syst. Signal Process. 2017, 85, 567–590. [Google Scholar] [CrossRef]
- Pan, B.; Qian, K.; Xie, H.; Asundi, A. Two-dimensional digital image correlation for in-plane displacement and strain measurement: A review. Meas. Sci. Technol. 2009, 20, 062001. [Google Scholar] [CrossRef]
- Stiros, S.; Moschas, F. Rapid decay of a timber footbridge and changes in its modal frequencies derived from multiannual lateral deflection measurements. J. Bridge Eng. 2014, 19, 1–6. [Google Scholar] [CrossRef]
- Dallard, P.; Fitzpatrick, A.J.; Flint, A.; Le Bourva, S.; Low, A.; Ridsdill Smith, R.M.; Willford, M. The London Millennium Footbridge. Struct. Eng. 2001, 79, 17–33. [Google Scholar]
- Thalla, O.; Stiros, S.C. Wind-induced fatigue and asymmetric damage in a timber bridge. Sensors 2018, 18, 3867. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Meng, X.; Nguyen, D.T.; Owen, J.S.; Xie, Y.; Psimoulis, P.; Ye, G. Application of GeoSHM system in monitoring extreme wind events at the forth Road Bridge. Remote Sens. 2019, 11, 2799. [Google Scholar] [CrossRef] [Green Version]
- Moschas, F.; Stiros, S.C. Three-dimensional dynamic deflections and natural frequencies of a stiff footbridge based on measurements of collocated sensors. Struct. Control Health Monit. 2014, 21, 23–42. [Google Scholar] [CrossRef]
- Brownjohn, J.M.W.; Koo, K.Y.; Scullion, A.; List, D. Operational deformations in long-span bridges. Struct. Infrastruct. Eng. 2014, 11, 556–574. [Google Scholar] [CrossRef] [Green Version]
- Saracoglu, E.; Bergstrand, S. Continuous monitoring of a long-span cable-stayed timber bridge. J. Civ. Struct. Health Monit. 2015, 5, 183–194. [Google Scholar] [CrossRef]
- Moschas, F.; Stiros, S. Dynamic deflections of a stifffootbridge using 100-Hz GNSS and accelerometer data. J. Surv. Eng. 2015, 141, 1–8. [Google Scholar] [CrossRef]
- Meng, X.; Dodson, A.H.; Roberts, G.W. Detecting bridge dynamics with GPS and triaxial accelerometers. Eng. Struct. 2007, 29, 3178–3184. [Google Scholar] [CrossRef]
- Gentile, C.; Gallino, N. Condition assessment and dynamic system identification of a historic suspension footbridge. Struct. Control Health Monit. 2008, 15, 369–388. [Google Scholar] [CrossRef]
- Bachmann, H.; Ammann, J.W.; Deischl, F.; Eisenmann, J.; Floegl, I.; Hirsch, H.G.; Klein, K.G.; Lande, J.G.; Mahrenholtz, O.; Natke, G.H.; et al. Vibration Problems in Structures—Practical Guidelines: Review; Birkhauser Verlag: Basel, Switzerland, 1997; ISBN 139783034899550. [Google Scholar]
- Ribeiro, D.; Calçada, R.; Ferreira, J.; Martins, T. Non-contact measurement of the dynamic displacement of railway bridges using an advanced video-based system. Eng. Struct. 2014, 75, 164–180. [Google Scholar] [CrossRef]
- Stiros, S.C.; Moschas, F. Stochastic determination of changes in sensor-based modal frequencies. Proc. Inst. Civ. Eng. Smart Infrastruct. Constr. 2018, 171, 110–116. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | 2013 | 2015 | ||||
|---|---|---|---|---|---|---|
| P1 | P2 | P3 | P1 | P2 | P3 | |
| Scale factor sx (pixels/mm) | 21.55 | 21.45 | 13.43 | 6.39 | 6.39 | 3.01 |
| Scale factor sv (pixels/mm) | 41.13 | 40.94 | 24.15 | 17.03 | 17.03 | 6.10 |
| Camera rotation angle pitch a (°) | 29.7 | 40.3 | ||||
| Camera rotation angle yaw c (°) | 40.8 | 40.0 | ||||
| Parameter | 2013 | 2015 | ||||
|---|---|---|---|---|---|---|
| P1 | P2 | P3 | P1 | P2 | P3 | |
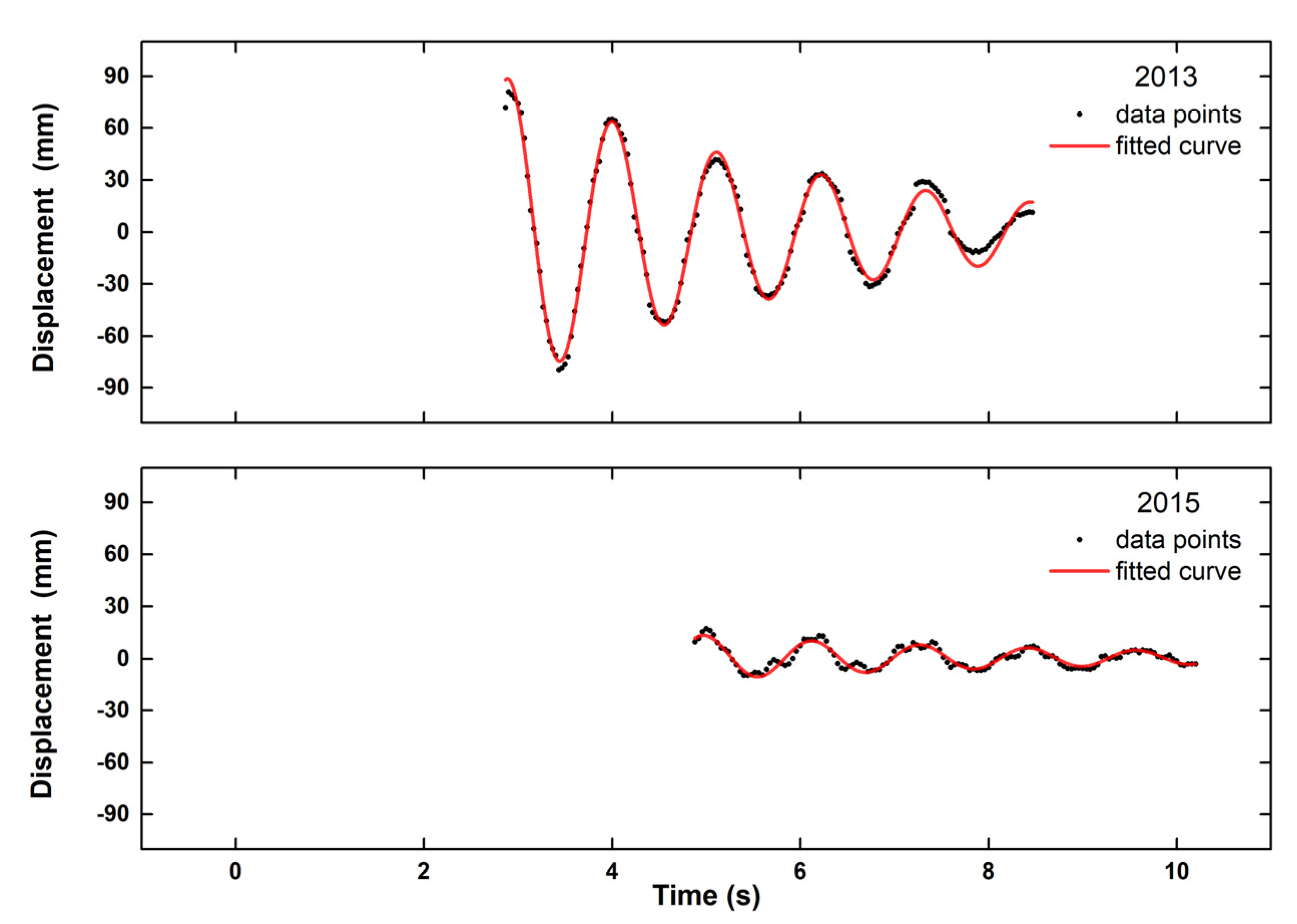
| Max deflection x (amplitude) (mm) | 47 | 34 | 19 | 26 | 26 | 13 |
| Max apparent deflection y (amplitude) (mm) | 25 | 17 | 15 | 5 | 7 | 10 |
| 410 | 256 | 81 | 100 | 102 | 31 | |
| 25 | 21 | 05 | 3 | 5 | 12 | |
| SNR | 16 | 12 | 16 | 33 | 20 | 3 |
| 0.90 | 0.90 | 0.90 | 0.87 | 0.87 | 0.86 | |
| 0.92/0.93 | 0.88 | |||||
| 5.4 | 4.9 | 3.9 | 5.5 | 4.9 | 5.5 | |
| Year | f (Known) | f (Video) |
|---|---|---|
| 2007 | 2.63 | |
| 2009 | 1.02 | |
| 2010 | 0.99 | |
| 2012 | 0.95 | |
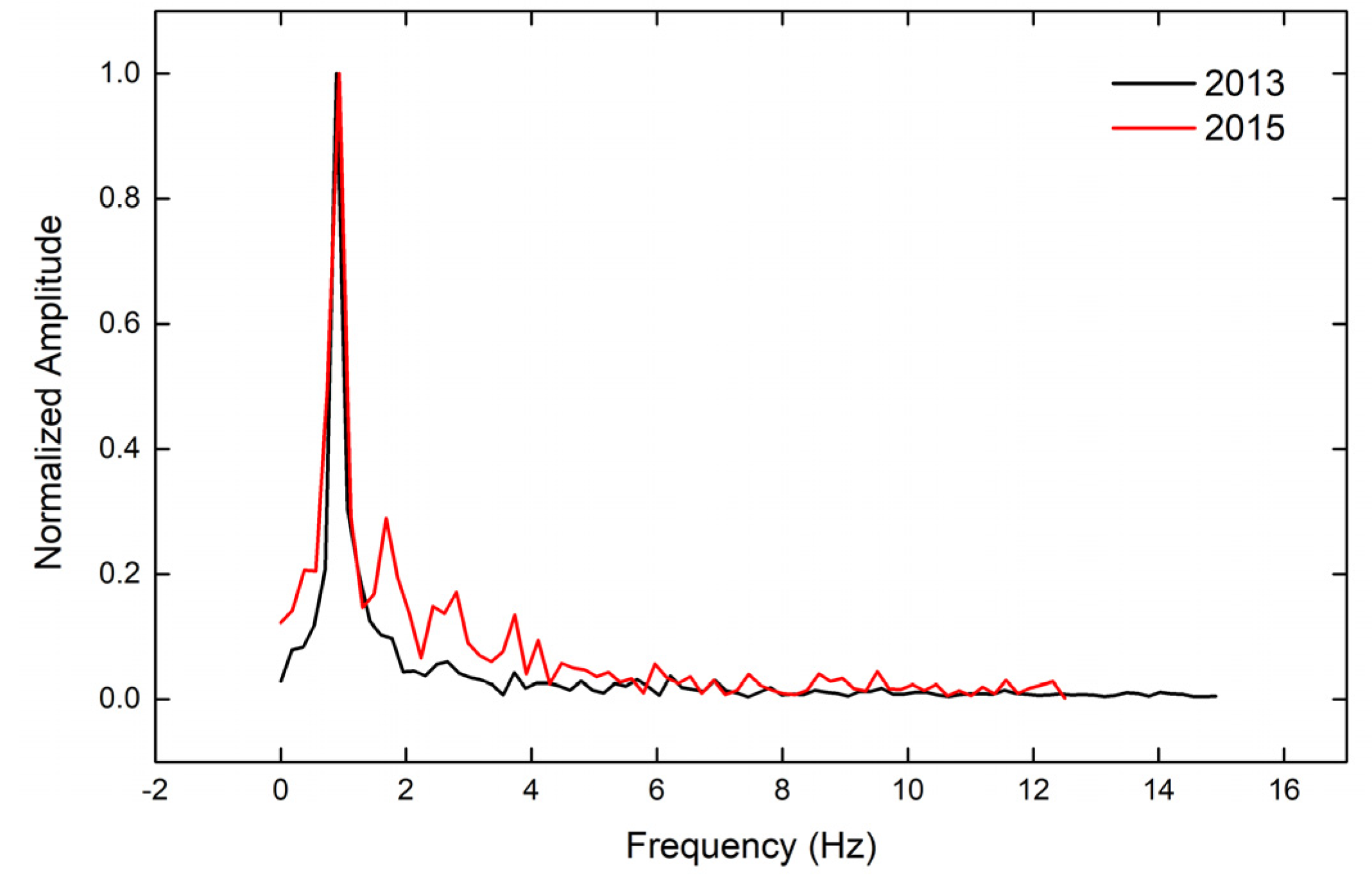
| 2013 | 0.92–0.93 | 0.90 |
| 2015 | 0.88 | 0.87 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fradelos, Y.; Thalla, O.; Biliani, I.; Stiros, S. Study of Lateral Displacements and the Natural Frequency of a Pedestrian Bridge Using Low-Cost Cameras. Sensors 2020, 20, 3217. https://doi.org/10.3390/s20113217
Fradelos Y, Thalla O, Biliani I, Stiros S. Study of Lateral Displacements and the Natural Frequency of a Pedestrian Bridge Using Low-Cost Cameras. Sensors. 2020; 20(11):3217. https://doi.org/10.3390/s20113217
Chicago/Turabian StyleFradelos, Yiannis, Olga Thalla, Irene Biliani, and Stathis Stiros. 2020. "Study of Lateral Displacements and the Natural Frequency of a Pedestrian Bridge Using Low-Cost Cameras" Sensors 20, no. 11: 3217. https://doi.org/10.3390/s20113217
APA StyleFradelos, Y., Thalla, O., Biliani, I., & Stiros, S. (2020). Study of Lateral Displacements and the Natural Frequency of a Pedestrian Bridge Using Low-Cost Cameras. Sensors, 20(11), 3217. https://doi.org/10.3390/s20113217